
A REAL-TIME TRACKING SYSTEM FOR TAILGATING
BEHAVIOR DETECTION
Yingxiang Zhang, Qiang Chen and Yuncai Liu
Institute of Image Processing and Pattern Recognition, Shanghai Jiaotong University
Frogren2002, Chenqiang, China
Keyword: IGMM, Color histogram similarity, Tailgating detection.
Abstract: It is a challenging problem to detect human and recognize their behaviors in video sequence due to the
variations of background and the uncertainty of pose, appearance and motion. In this paper, we propose a
systematic method to detect the behavior of tailgating. Firstly, in order to make the tracking process robust
in complex situation, we propose an improved Gaussian Mixture Model (IGMM) for background and
combine the Deterministic Nonmodel-Based approach with Gaussian Mixture Shadow Model (GMSM) to
remove shadows. Secondly, we have developed an algorithm of object tracking by establishing tracking
strategy and computing the similarity of color histograms. Having known door position in the scene, we
specify tailgating behavior definition to detect tailgater. Experiments show that our system is robust in
complex environment, cost-effective in computation and practical in real-time application.
1 INTRODUCTION
Extensive researches have been conducted in video
surveillance to improve social and private safeties.
In our surveillance system, we detect behavior of
tailgating in the scene. Detecting tailgating from
video heavily depends on the detection of moving
objects involved in each frame and the integration
of this frame-based information to recognize special
behavior. This high level behavior description relies
on exact foreground detection and track of moving
objects.
Much work has been done in background
modeling and foreground detection. Karmann and
Brandt, Kilger modeled each pixel with a Kalman
Filter (Karmann & A. Brandt, 1990) to make the
system robust with lightning changes in the scene.
M.Piccardi used mean-shift approach (T. Jan & M.
Piccardi, 2004) to express the mixed distribution of
each pixel. Stauffer and Grimson (C. Stauffer & W.
E. L Grimson, 1999) presented modeling each pixel
as a mixture of Gaussians and using an on-line
approximation to update the model. Shadow
detection and removing is critical for accurate
object detection in video streams since shadow is
often misclassified as an object, causing errors in
segmentation and tracking. The most common
algorithms are Statistical Nonparametric approach,
Statistical Parametric approach and Deterministic
Nonmodel-Based approach (R. Cucchiara, M.
Piccardi and A. Prati, 2003). Tracking requires
matching the same moving objects in consecutive
frame based on the extracted character. M. Isard and
A. Blake proposed Condensation algorithm (M.
Isard and A. Blake, 1998) which uses Monte Carlo
approach to obtain statistic nonparametric model to
track objects in real-time application. S.Birchfield
studied color histogram models combining with
Gradient model of density function (S.T. Birchfield
1998) to track.
In this paper, firstly, we propose an improved
adaptive mixture Gaussian model (IGMM). In
classic Gaussian Mixture Model (GMM) (C.
Stauffer & W. E. L Grimson, 1999), Gaussian
background model of each pixel is independent.
Also, due to the fact that RGB of each pixel
includes 3-5 Gaussian distributions and GMM
updates every frame, high computational cost of
GMM makes surveillance system difficult to
accommodate real-time operation. In our approach,
we improved GMM’s updated speed and reduced
the number of Gaussian model by segmenting
different regions of the scene. We also use GMM to
remove shadows by updating parameters of
Gaussian distribution of suspicious shadow pixels.
Secondly, we use color histogram to track and
match moving objects (S. T. Birchfield, 1998).
Object occlusion is a difficult problem in
understanding of human behavior. We utilize seven
398
Zhang Y., Chen Q. and Liu Y. (2009).
A REAL-TIME TRACKING SYSTEM FOR TAILGATING BEHAVIOR DETECTION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 398-402
DOI: 10.5220/0001665703980402
Copyright
c
SciTePress

possible hypothetical situations to obtain a better
matching. Lastly, by illustrating definition of
tailgating, we sign every object stepping into the
scene and constitute logical rules to catch candidate
tailgater. Tested our algorithm using real scene
video, the system gave satisfactory detection results.
This paper is organized as follows: Section 2-4
respectively describes foreground extraction,
tracking scheme and definition of tailgating event.
In section 5 we discuss the application environment
and analyze the results in real-time surveillance
scenes. Section 6 gives conclusion.
2 FOREGROUND EXTRACTION
2.1 Background Modeling
Gaussian Mixture Model (GMM) (C. Stauffer and
W. E. L Grimson, 1999) has been widely used for
background modeling as it adapts to deal robustly
with lighting changes, repetitive motions of scene
elements. However, to process more complex
environment, it should make more Gaussian
distributions to resist disturbance. And based on the
principle of updating GMM, all the parameters of
Gaussian function of each pixel have to be updated
in every next frame which increases computation
and make real-time work difficult.
We notice that only a few parts of one frame
suffer changes while other regions are static in the
surveillance scene. Pixels in static regions always
match one Gaussian distribution which has a high
possibility to match the same pixel in the following
frames. After learning, the distribution weight ω has
a large value while deviation σ2 becomes
comparatively smaller. In a long time the value of
ω/σmaximizes and mean of the same Gaussian
distribution would be regarded as pixel value of
background. It is not necessary to update
background model in static regions in every frame.
In Improved Gaussian Mixture Model (IGMM) we
proposed, when the probability that certain old
Gaussian distribution matches every new pixel
value in the same region exceeds chosen threshold,
we will not update parameters of background
distributions of the same pixel in the next 100
frames. After 100 frames, we reset parameter ω of
Gaussian distributions to be equal and update GMM
until that probability reaches chosen threshold
again.
2.2 Shadow Removing
The principle of GMM can also be used for removing
shadow. In this paper, we combine Deterministic
Nonmodel-Based approach (R. Cucchiara, M. Piccardi
and A. Prati, 2003) with GMM to remove shadow.
In the first step, we detect shadow taking advantage of
relationship between the reference frame and background
in HSV space. HSV color space explicitly separates
chromaticity and luminosity and has been proved easier
than the RGB space to set a mathematical formulation for
shadow detection. A shadow mask
()SP k
at frame k
defined as follows (R. Cucchiara, M. Piccardi & A.
Prati 2003):
,
,,
,
,
().
1().().()
().
()
0
ij
ij ij H
ij
ij
IkV
if and I k S B k S and D k
BkV
SP k
otherwise
αβ γ
τ
⎧
≤
≤−≤≤
⎪
=
⎨
⎪
⎩
(1)
Where, I
i,j
(k) and B
i,j
(k) are the pixel values at coordinate
(i,j) in the input image( frame k) and in the background
model (computed in the frame k) respectively, H,S ,V
means hue, Saturation and Value of one pixel, α ,β ,γ ,ζ
denotes threshold,
,, ,,
() min( (). (). ,360 (). (). )
H ijij ijij
Dk I kHBkH I kHBkH=−−−
(2)
In the second step, Gaussian Mixture Shadow
Model (GMSM) learns and updates its parameter
based on those candidate pixels of shadow detecting
in HSV space. If the relationship between candidate
pixels of shadow and certain Gaussian distribution of
GMSM meets:
,1 ,1
| | ,i=1,2,...K,
sss
tit it
ID
μσ
−−
−≤×
(3)
Where,
),(~
ss
G
σμ
, S means GMSM and
D
s
=2.5,K is number of Gaussian distributions. Then
parameters updated as follows:
,,1
(1 )
s
ss s
it it
ω
αω α
−
=
−+
(4)
,,1
(1 )
s
ss s
it it t
I
μ
ρμ ρ
−
=− +
(5)
222
,,1,
()(1 )( ) ( )
sssss
it it t it
I
σρσρμ
−
=− + −
(6)
Here,
α
is learning ratio which relates to
background updating speed and
10 ≤≤
α
.
ρ
is
learning ratio of parameters and
,
s
it
α
ρ
ω
≈
.
If there is no Gaussian distribution matching
candidate pixel of shadow I
t
, new Gaussian
distribution will replace the distribution with the
smallest weight. New distribution will have a
comparatively larger standard deviation σ
0
s
and
smaller weight ω
s
0
and mean I
t
. Other Gaussian
distributions keep the same mean and deviation, but
the weights will decrease:
,,1
(1 )
s
ss
it it
ω
αω
−
=−
(7)
A REAL-TIME TRACKING SYSTEM FOR TAILGATING BEHAVIOR DETECTION
399
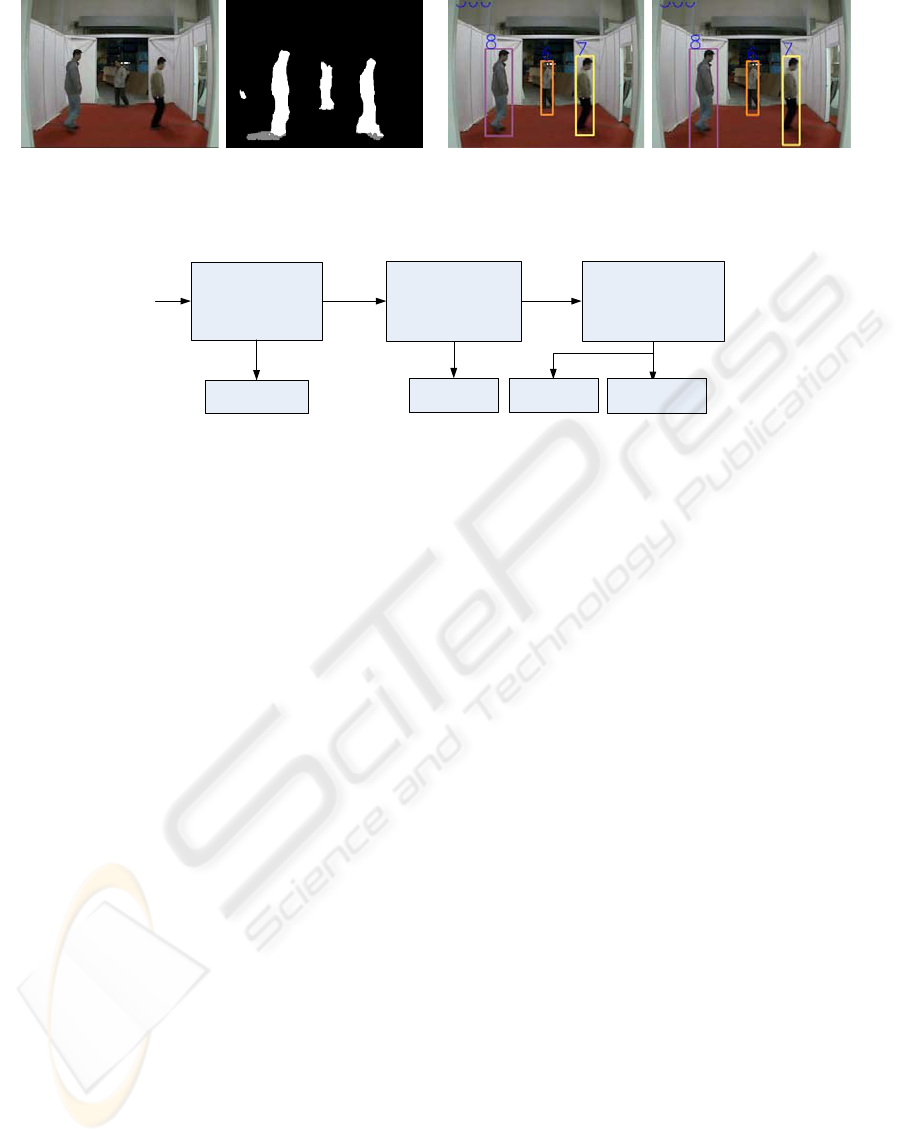
Figure 1: From left to right, the first figure is original image. The second one is foreground with foreground as white and
shadow pixels as grey. The last two compares the accuracy of object tracking with and without shadow removing
respectively.
Update IGMM
and judge
whether I
t
is
foreground
Judge whether I
t
is candidate
shadow in HSV
space
Update GMSM
and judge whether
I
t
is real shadow
Background
Moving
object
Moving
object
Background
I
t
Y
N
Y
Y
N
N
Figure 2: Flow chart of foreground extraction.
Finally, after normalization of all the weights of
Gaussian distributions, we array Gaussian
distributions as
s
ks
ss
iii ,...,,
21
in accordance with the
value of
s
ti
s
ti ,,
/
σω
. If preceding N distributions meet
following principle:
1
,
s
N
s
i
s
s
kt
Ki
ω
τ
=
≥
∑
(8)
Then these N distributions can be regarded as
shadow distribution. If value of candidate shadow
pixel I
t
does not match every shadow distribution,
this pixel is defined as moving objects. However, if
it matches one shadow distribution, it would be
eliminated from foreground as shadow. The result
of shadow removing can be seen in Figure 1 and the
detailed backgrounding flow chart is shown in
Figure 2.
3 TRACKING METHOD
3.1 Tracking Strategy
After motion detection, surveillance systems
generally track moving objects from one frame to
another in an image sequence. One of the main
difficulties of the tracking process concerns the
partial or total temporal occlusions of the objects.
Therefore, the splitting of the blobs in order to
separate or isolate the objects has to be considered
in this section. Next are seven possible situations in
matching strategy:
1) Normal Event: If two blobs of two consecutive
frames are overlapped, we think these two blobs
belong to one motion object.
2) Entry Event: A blob at the current frame with no
matching blob of previous frame is thought as an
entering object.
3) Exiting Event: Finding no matching blob at the
current frame for a blob of previous frame, and the
place of this blob is at the edge of frame.
4) Stopping Event: The place of this blob is not at the
edge of image and the color similarity for the places
of blob at the consecutive frame is larger than a
threshold.
5) Vanishing Event: Finding no matching blob at the
current frame for a blob of previous frame.
6) Splitting Event: More than one blob match a
previous blob.
7) Merging Event: A blob at current frame matches
more than one previous blob.
This strategy helps effectively handle problems
such as disappearance, occlusion and crowd.
3.2 Color Histogram Similarity
Objects can be divided and merged. When objects
merge, the labels are inherited from the oldest
parent region. When an object splits, all separating
objects inherit their parent’s labels. In order to track
people consistently as they enter and leave
groups, each person’s appearance must be
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
400

Figure 3: The two rows display the processed sequence using our method. The first row displays outdoor scene with camera
placed at side of the site while the second row gives indoor tailgating scene e with camera placed at top of the site.
Table 1: Detecting result of tailgating event.
GMM K=3 IGMM K=3 GMM K=5 IGMM K=5
Scene A 9 12 7 10
Scene B 8 11 6 8
Table 2: Comparison of average processing speed between IGMM and GMM, unit (frame/s).
Frame frequency Real events num Detected events num event detection rate
10frame/s 30 28 93.3%
15frame/s 30 27 90%
20frame/s 30 25 83.3%
modeled. A color model (R. P. Perez, C. Hue and J.
Vermaak, 2002) is built and adapted for each person
being tracked. A histogram H
i
(X | k) counts the
number of occurrence of X=(R, G, B) within the
person i at frame k. Because the same person may
have different sizes in different frames, we should
normalize H
i
(X | k).
_
(|) (|) ()
inew i i
P
Xk HXk Ak=
(9)
Where, A
i
(k) means the number of pixels within
the mask for person i at frame k.
Histogram models are adaptively updated by
storing the histograms as probability distributions:
_
(1) (1)(1)()
iinew i
P
Xk P Xk PXk
αα
+= ++−
(10)
To determine whether two blobs at frame m and n belong
to one object, similar degree (similarity) of color is
computed.
,
(|) (|)
(|,)
|( |)|| ( |)|
ij
ij
ij
P
Xm PXn
degree X m n
P
Xm PXn
×
=
(11)
Where, P
i
(X | m) means normalized histogram of
X=(R, G, B) for person i at frame k. If degree
i, j
(X|
m, n) is larger than a threshold, we think two blobs
belong to one object.
4 TAILGATING DETECTION
On the basis of tracking, effective recognition of
Tailgating behavior requires specific definition of
this behavior. Tailgating means one person steps
behind former one and slides into the entrance
without allowance. The tailgating behavior contains
two steps. Firstly, we define Euclidean distance
between two walkers as a standard distance to
judge tailgater. If one person steps behind the
former with the same direction and a higher speed,
he or she may gradually approach the former and
when the distance between them is smaller than the
standard distance, he is regarded as a tailgater
.
22
21 21
()( )Lxxyy<= − + −
(12)
Here, L means the standard distance user defines and
(x1, y1) denotes the center of the former, (x2, y2)
denotes the center coordinate of tailgater.
The Second phase is to assure the tailgater
entering into the entrance following the authorized
person in a short time. When the candidate tailgater
tails after the former, the two blobs always merge
into one big blob with two labels.
Comparing Euclidean distance between centers
A REAL-TIME TRACKING SYSTEM FOR TAILGATING BEHAVIOR DETECTION
401

of the candidate blobs and door with a threshold, we
confirm the range of tailgating. If this distance is
smaller than the threshold, we judge whether
Vanishing Event happens near the door. If
Vanishing Event happens, the behavior will be
recorded.
5 RESULTS AND ANALYSIS
To illustrate the proposed method, we experimented
in an exhibition hall using one digital camera with
image dimension of 320*240. Figure 3 shows a
sequence of indoor and outdoor scenes containing
walking people who imitates tailgating behavior.
The sequence includes lightning changes caused by
strobotron, reflections from windows and moving
shadows. With traditional tracking method, tracking
often failed in the following cases:
Case 1: People walk close to each other. In this
case, due to the closely distributed foreground
points, extracting single object based on connected
components algorithm is difficult.
Case 2: Two people walk across each other or
one occludes another. In this case, two different
objects merging into one mixed component brings
difficulty in tracking the right one with exact
trajectory.
Case 3: One connected component disappears in
the scene without touching border. In this case,
many tracking algorithm can not determine whether
this moving object really disappears from the scene
or just stays still in the scene.
In our paper, method we proposed can decrease
moving shadow and other disturbance comes from
environment using IGMM and GMSM to extract
single connected component. We have numbered
moving objects in the scene and compute the
similarity of color histogram between points at
current frame and background to judge object’s
disappearance or stillness. With the direction of
velocity and color information, we can process most
examples of merging and detaching. Table 1 shows
processed results from the indoor sequence
Exhibition Hall.
We find the veracity of our algorithm firmly
related to the frame frequency of the camera or
video. More than 90% of tailgating events can be
detected at 10frame/s and more than 80% of the
events can be detected at higher frame frequency.
Table 2 provides the evidence that our IGMM
has increased processing speed especially in certain
surveillance environment where active region of
moving objects occupies only a part of the whole
scene.
6 CONCLUSIONS
We have proposed an algorithm to detect tailgating
behavior using background modeling, tracking
strategy and behavior definition. There are three
main issues in the process of surveillance. First is
acquiring true foreground in complex environment
by making use of IGMM and GMSM. Second is
effectively tracking by means of considering
different situation and matching objects in
consecutive frames through similarity computation
of color histograms. Third is anti-tailgating taking
advantage of definition of tailgater. Compared with
other methods in surveillance, our novel algorithm is
cost-effective and useful in real-time application.
ACKNOWLEDGEMENTS
This research work is supported by National 973
Program of 2006CB303103 and National Natural
Science Foundation of China (NSFC) under Grant
No.6083099.
REFERENCES
Karmann and A. Brandt. 1990. “Moving object
recognition using an adaptive background memory.”
Time-Varying Image Processing and Moving Object
Recognition, 2, Elservier, Amsterdam, Netherlands,.
T.Jan, M.Piccardi. 2004. “Mean-shift background image
modeling.” In Proceedings of the international
conference on image processing.
C. Stauffer, W. E. L Grimson. 1999. “Adaptive
background mixture models for real-time tracking”. In
Proc. Conf. Comp. Vision Pattern Rec., Vol. 2.
R. Cucchiara, M. Piccardi, A. Prati. 2003. “Detecting
moving objects, ghosts and shadows in video
streams”. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 25(10):1337 ~ 1342.
M. Isard, A. Blake. 1998. “Condensation-conditional
density propagation for visual tracking”. International
Journal of Computer Vision, 29(1): 5-28.
S.T. Birchfield. 1998. “Elliptical head tracking using
intensity gradients and color histograms”. In Proc.
Conf. Comp. Vision Pattern Rec., pages 232–237, CA.
R. P. Perez, C. Hue, J. Vermaak. 2002. “Color-based
probabilistic tracking.” In Proceedings of the 7
th
European Conference on Computer Vision. Berlin,
Germany, Springer-Verlag, 661-675.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
402
