
A FAST AND ROBUST HAND-DRIVEN 3D MOUSE
Andrea Bottino and Matteo De Simone
Dipartimento di Automatica e Informatica, Politecnico di Torino
Corso Duca degli Abruzzi 24, 10129 Torino, Italy
Keywords: Computer vision, Image processing, 3D hand tracking, Non intrusive motion capture, Real time tracking.
Abstract: The development of new interaction paradigms requires a natural interaction. This means that people should
be able to interact with technology with the same models used to interact with everyday real life, that is
through gestures, expressions, voice. Following this idea, in this paper we propose a non intrusive vision
based tracking system able to capture hand motion and simple hand gestures. The proposed device allows to
use the hand as a “natural” 3D mouse, where the forefinger tip or the palm centre are used to identify a 3D
marker and the hand gesture can be used to simulate the mouse buttons. The approach is based on a
monoscopic tracking algorithm which is computationally fast and robust against noise and cluttered
backgrounds. Two image streams are processed in parallel exploiting multi-core architectures, and their
results are combined to obtain a constrained stereoscopic problem. The system has been implemented and
thoroughly tested in an experimental environment where the 3D hand mouse has been used to interact with
objects in a virtual reality application. We also provide results about the performances of the tracker, which
demonstrate precision and robustness of the proposed system.
1 INTRODUCTION
In the recent years there has been a growing interest
in the scientific and industrial communities to
develop innovative devices allowing a natural
interaction with machines, and recent products, like
the Nintendo Wii console and the Microsoft Surface,
try to introduce novel habits for computer users.
From this point of view, one of the most natural
ways to interact with objects is using our bare hands.
In real world, we use our hands to touch, grasp and
move the objects and we typically use our fingers to
point at something. Acting in the same way on the
objects, allows people to transfer already acquired
abilities to the interaction with the computer and to
expand possibilities and complexities in human-to-
computer communication.
Several commercial gesture based devices exist
at present. They usually require extraneous wearable
hardware, such as markers or sensing gloves. These
solutions provide high quality results but they are
expensive, intrusive and they could disturb the
movements of the user.
On the contrary, vision based techniques could
offer a simple, expressive, and meaningful manner
to interact with the computer. These techniques are
cost-effective and non invasive, and they have been
used in many contexts.
In this paper, we propose a simple, fast and
robust hand tracking system that can be used to
develop a “natural” 3D mouse. The output of the
tracker is the position of a 3D marker and an
indication of the actual posture of the hand, which
can be used to mimic the click of the mouse buttons.
Our system uses two video cameras and the
proposed approach separates the elaboration of the
two image streams, refining the results in a merging
stage at the end of the process. In more details, for
each image stream, we evaluate the perceived hand
posture and the 2D position, on the image plane, of
the reference point. The results are then combined in
order to evaluate the final 3D marker position and
hand posture.
Experimental results demonstrate that the
proposed system is fast, robust and computationally
manageable on medium level computers. The paper
is organized as follows. In Section 2, we describe
our approach. Section 3 evaluates the experimental
results. Concluding remarks are reported in Section
4.
567
Bottino A. and De Simone M. (2009).
A FAST AND ROBUST HAND-DRIVEN 3D MOUSE.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 567-574
DOI: 10.5220/0001746005670574
Copyright
c
SciTePress

1.1 Related Works
The general approach to vision based hand tracking
usually requires three main processes: hand
segmentation, hand tracking and gesture estimation.
Colour is the most common image clue for feature
extraction (Bradski, 1998), (Chen, Fu and Huang,
2003), (Pantrigo, Montemayor and Sanchez, 2005).
Other visual cues, like motion, edges and shading
have been proposed in order to reduce influences of
varying illumination and cluttered background (Cui
and Weng, 2000), (Liu and Jia, 2004). Recent results
in integrating different visual information offer more
robust solutions (Akyol and Alvarado, 2001), (Shan
Lu et al, 2003).
Several approaches have been applied to the
tracking problem: a review of the most popular
algorithms is presented in Mahmoudi and Parviz
(2006). The CAMShift algorithm (Bradski, 1998) is
a robust nonparametric technique derived form
Mean Shift (Cheng, 1995). Improvements of
CAMShift algorithm can be found in Liu et al.
(2003), Zhai et al. (2005). The Condensation
algorithm (Isard and Blake, 1998) is a powerful
stochastic approach based on Monte Carlo method
that has been applied to several challenging
environments, such as wearable computers (Liu and
Jia, 2004) and real-time humanoid interaction
(Gumpp et al, 2006). Improvements of Condensation
are Icondesation (Isard and Blake, 1998), particle
filtering (Weiser and Brown, 1995), (Shan et al,
2004), smart particle filtering (Bray, Koller-Meier
and Van Gool, 2004) and local search particle filter
(Pantrigo, Montemayor and Sanchez, 2005).
Articulated and deformable 3D hand model driven
techniques have also been proposed by Stenger,
Mendonca and Cipolla (2001), (Heap and Hogg,
1996).
As for the gesture estimation problem, a good
survey on the subject is Erol et al., (2007). We can
have partial pose approaches (Oka, Sato and Koike,
2002), (Letessier and Bèrard, 2004), which are
usually based on rough models of the hand and
cannot reconstruct all the degrees of freedom (DOF)
of the hand, and full DOF approaches, usually
exploiting complex 3D models (Drummond and
Cipolla, 2002), and performing single frame pose
estimation offering the advantage of self-initializing
and re-initializing algorithms, capable of handling
fast hand motion where time coherence is an useless
clue (Stenger et al., 2004), (Tomasi, Petrov and
Sastry, 2003).
2 THE MULTIPLE CAMERA
APPROACH TO HAND
TRACKING
The goal of our work is to develop a simple and
effective input device which allows a “natural” way
of interacting with the computer using the bare
hands. In our scenario, a single user sitting at a
desktop interacts with a VR application picking 3D
points, selecting and moving objects in the
environment or changing the view on the simulated
world. To perform these tasks, the 3D counterpart of
a desktop mouse, that is a device capable of moving
a 3D marker in the environment and to issue
commands by pushing some buttons, could be
sufficient. From the point of view of the user, which
is immersed in a virtual environment where the
objects are floating in front of his eyes, the most
natural way to select an object would be by touching
it, to change its position by moving it with the hand,
and picking a location by pointing it. To select a
different view of the scene, a commonly used
approach is the virtual trackball paradigm: the
objects are enclosed in a glass ball which can be
rotated around its centre to change the world view.
Again, a natural way to perform this operation
would be to touch the glass ball and rotate it with the
hand. Therefore, the position of the forefinger tip
can be used as a “natural” 3D marker that can be
controlled moving the hand (Figure 1a-b). A simple
way to simulate the click of the mouse could be to
associate the event to a specific, and comfortable,
hand posture. For instance, when the forefinger is
extended, such a posture could be the one where also
the thumb is stretched out (Figure 1c-d). Thumb-
index enslaving is not a problem for ergonomy,
since Olafsdottir (2005) shows that the indices of
digit interaction does not depend whether the thumb
is one of the involved digits.
Figure 1: Interaction with the virtual environment.
The click of a second button, e.g. the right
button, could then be mimicked with another
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
568

posture. We experienced that extending another
finger is not comfortable for the user, while it is
much easier to close the hand. Using this posture,
the forefinger tip cannot be used anymore as 3D
marker, and another reference point, for instance the
centre of the palm, can be chosen.
The proposed hand tracking system uses two
cameras to reconstruct the (x,y,z) position of the
marker and of the hand posture. The two cameras
are located on the sides of the desktop where the
user sits and are positioned and oriented in order to
observe a common area, the active area, where the
user can move its hand.
Our approach works in two phases. First, the
information about 2D marker position and perceived
hand posture are extracted from each image stream
separately. Then, these data are combined in order to
obtain precise 3D information. The rationale of this
approach is that the 2D information can be obtained
in a fast and reliable way, and that processing
separately the two image streams allows the two
threads to be executed in parallel on multi-cpu or
multi-core based architecture, guaranteeing a
substantial improvement of the execution times.
The result is a simple and computationally fast
system, which is very robust against noise and
cluttered backgrounds. The outline of the proposed
hand tracking system is the following.
After initializing some of the parameters used by
the system, the two image streams are processed
separately. This step involves three processes:
1. Detection/ tracking: identifies in the
incoming image the user hands and
tracks it along the video sequence.
2. Segmentation: extracts the silhouettes of
the hand from the incoming image.
3. Recognition: identifies the posture of the
hand and the 2D marker position.
Finally, stereoscopy is used to combine 2D
information and to obtain the required 3D marker
posture and hand gesture. In the following, the
single components of these processes will be
described in details.
2.1 Initialization
Initialization is an offline process that involves
several system’s parameters.
First, the camera needs to be calibrated. This
process establishes a relation between the image
planes of the cameras and a fixed reference system
in the 3D world. In this work we used the approach
described in the Open Computer Vision Library
(n.d.).
Second, since the tracking algorithm uses a
probability distribution image of the chromatic
components of the objects to be tracked, a reference
colour model needs to be initialized. In this case, we
are interested in detecting skin-like pixels. It has
been demonstrated (Bradski, 1998) that different
skin colour models are not needed for different races
of people. This fact allows building a priori a skin
model that can be used to identify the hand. This is
modelled with a simple chromaticity histogram,
created interactively by selecting a part of the image
corresponding to the hand. The RGB values of the
pixels of the selected region are converted into the
Hue Saturation Value (HSV) colour system,
allowing to create a simple colour model taking 1D
histograms from the hue channel.
2.2 Single-stream Processing
Single stream processing is based on the approach
presented by Bottino and Laurentini (2007). It
combines several computer vision algorithms, in
order to exploit their strengths and to minimize their
weakness.
2.2.1 Detection/ Tracking
The detection/tracking module is a state machine,
whose state diagram is shown in Figure 2. In the
detection state, the input image is processed until a
hand enters the image. Then, in the tracking state,
the hand is tracked until it exits the image.
Figure 2: Detection/ tracking module.
This module uses two different algorithms: Mean
shift (Cheng, 1995) for object detection and
CAMShift (Bradski, 1998) for object tracking.
The input of both algorithms is a probability
image, where pixels more likely to belong to the
searched object have a higher value. This probability
image is obtained by back projecting on the image
the chromaticity histogram evaluated during the
initialization step. The probability image is then
filtered, as suggested by Bradski (1998), in order to
ignore pixels whose hue value is not reliable. An
example of an image frame and its corresponding
A FAST AND ROBUST HAND-DRIVEN 3D MOUSE
569
probability image is shown in Figure 3a and Figure
3b.
Mean shift uses a search window, whose size is
fixed, which is iteratively moved along the image
“climbing” the probability distribution until the
optimum is reached. At each step, the centre of mass
of the search windows is evaluated and the search
window is centred on it. In our implementation, in
order to avoid systematic errors, the initial position
of the search window is randomly set in several
positions of the image. The final location giving the
best score is chosen (Figure 3c and Figure 3d). To
find when an object is detected, the percent of
object-like pixels in the search window is compared
with a pre-defined threshold.
CAMShift is a generalization of the Mean shift.
While Mean shift is designed for static distributions,
CAMShift is designed for dynamically changing
distributions, such as those occurring in video
sequences where the tracked object moves, so that
size and location of the probability distribution
change in time. Hence, at every iteration, also the
size of the search windows is adapted to the
incoming distribution. Again, to find when an object
is lost, the percent of object-like pixels in the search
window is compared with a pre-defined threshold.
The output of this module is a flag indicating if the
object has been detected and the region R where it is
located.
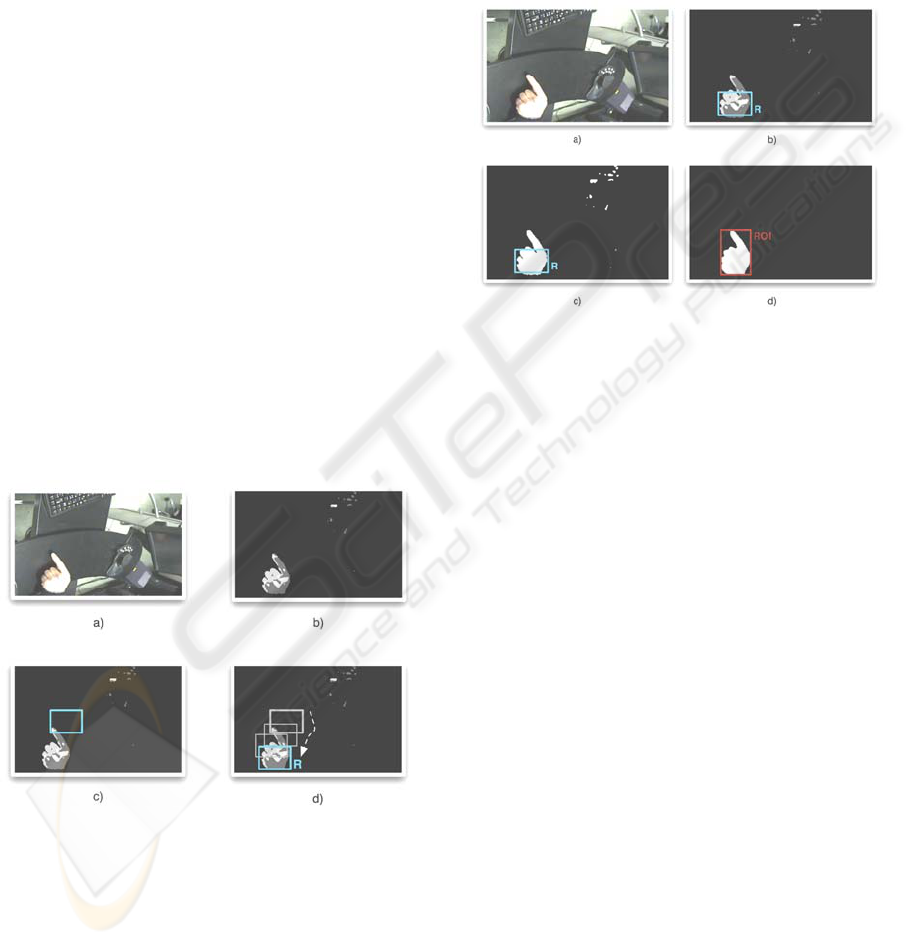
Figure 3: a) An incoming image and b) the corresponding
histogram back projection. c) The initial detection region.
d) The Mean Shift moves the R region to the optimum.
2.2.2 Segmentation
The segmentation module, given position and
dimension of R, extracts the silhouette of the hand
from the probability image. First, the probability
image is thresholded in order to obtain a binary
image. Then, morphological operators are applied to
remove spurious pixels and holes are removed with
a flood fill algorithm. Finally, the bounding box of
the main connected component contained in the
search window is evaluated. Any further processing
on the images will take place only on this Region of
Interest (ROI), reducing the computational burden.
Other disturbing connected components, not
belonging to the hand, are discarded (Figure 4).
Figure 4: segmentation process. a) source image, b)
probability image and R region, c) thresholded image, d)
the main connected component in R and the correspondng
ROI.
2.2.3 Recognition
The input of this process is the silhouette of the
moving object and the R and ROI regions. The
output is the 2D position of the marker and the
posture of the hand.
A simple 3D model of the hand is used to
reconstruct the desired information. It is composed
by one to three ellipsoids, depending on the gesture
to represent. Each ellipsoid is represented in matrix
form as x’Qx, where x’ = [x y z 1] and Q is a
coefficient matrix. Using this representation, every
transformation (translation, rotation, scaling) can be
applied to the model with a simple matrix
multiplication. The model has 7 degrees of freedom,
3 for the position, 3 for the orientation and 1 for the
posture, which determines also the number of
ellipsoids composing the model. The posture can
assume three discrete values: 0, hand closed 1, hand
closed with the forefinger extended, and 2, hand
closed with thumb and forefinger extended. The
three postures, the shapes of the corresponding
models and the assigned values are shown in Figure
5. The projections of the ellipsoids on a plane are
quadrics and can be obtained, again, with a simple
multiplication between matrices. Then, knowing the
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
570
projection matrix obtained from calibration is
sufficient to project the model on the image plane.
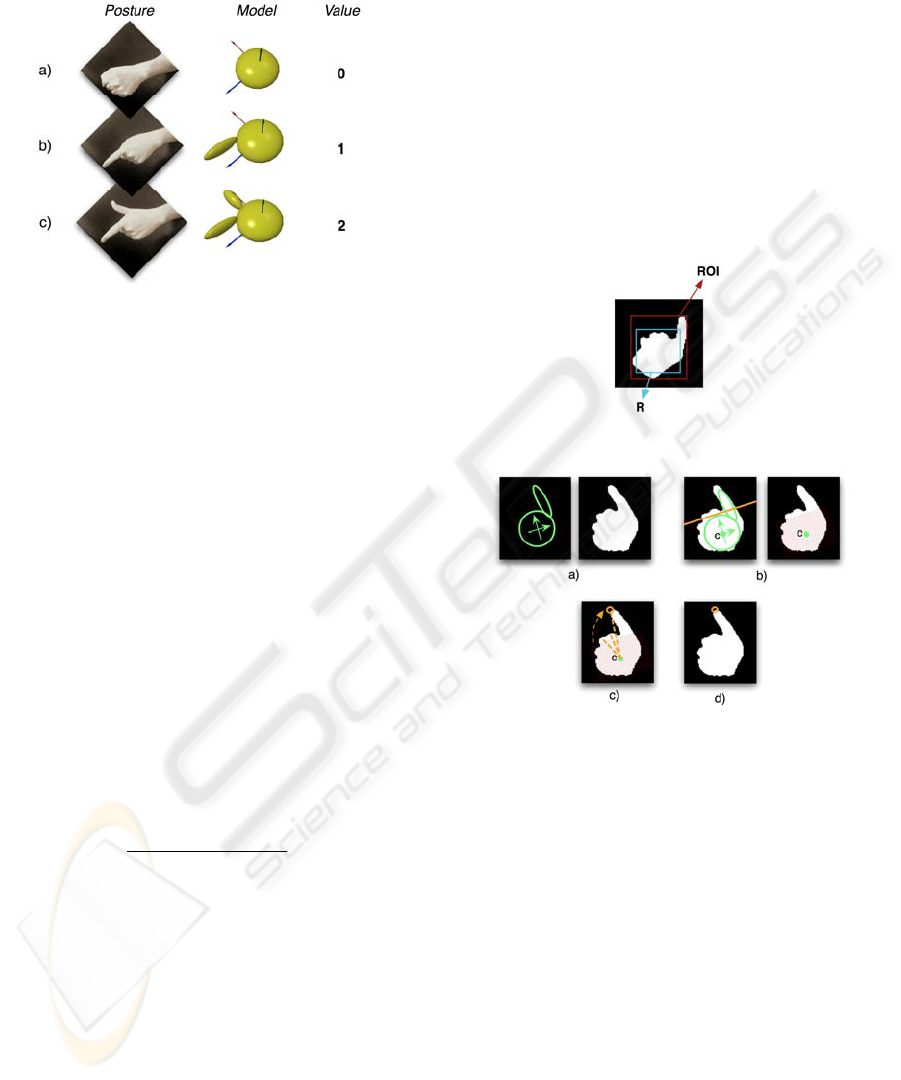
Figure 5: the three hand postures identifiable, the
corresponding model shape and the assigned value.
The state of the model is reconstructed using the
ICondensation algorithm (Liu and Jia, 2004), which
is a combination of the statistical technique of
importance sampling with the Condensation
algorithm (Isard and Blake, 1998). Basically, it tries
to approximate the unknown statistic distribution of
the state of a process with a discrete set of samples
and associated weights. This set evolves iteratively
from an initial set of random samples, and at each
step t their weights are updated. From these weights,
it is possible to predict the probability distribution
over the search space at time t+1. Thus, samples
with higher probability are more likely to be
propagated over time. The process is iterated for a
predefined number of steps, and the final state is
given by the weighted sum of the final samples. In
our case, each sample represents a model state and
the weighting function is defined from the projection
of the model on the image plane. Given I
s
, the result
of the exor of model projection and silhouette of the
hand, the weight of the sample s is given by:
∑
∈
+
=
s
Iyx
s
s
yxI
w
),(
),(1
1
(1)
The initial set is created from random samples in
the neighborhood of an initial guess of the hand
state. This is obtained from an analysis of the
incoming silhouette, which works as follows. From
the segmentation process we have the R and ROI
regions (Figure 6). The palm of the hand as a high
probability to fall into R, while finger pixels are
mainly in the area (ROI-R). Therefore, R can be
used to extract 2D position and orientation of the
palm.
The first order moments of R give a reasonable
indication of the centre of the palm, while dimension
and orientation of the ellipse corresponding to the
palm can be deduced from the covariance ellipse
built on the second order moments. From these
parameters, we can obtain, given the dimension of
the user hand, a rough approximation of the distance
from the camera and of the orientation of the
ellipsoid corresponding to the 3D palm. An initial
indication of the hand gesture can be obtained
analyzing the moments of the ROI region. In
particular, the third order moments give us an
indication of the asymmetry of the image along its
principal axes. A significant asymmetry along the
major axis is a strong indication of the forefinger
presence, while a significant asymmetry along the
minor axis is an indication of the thumb presence.
Figure 6: ROI, external rectangle, and R, inner rectangle.
Figure 7: Marker identification. a) Input data: model (left)
and silhouette (right). b) The model is used to mask the
palm. c) Curvature evaluation of boundary points. d) The
marker is located on the point with maximum curvature.
The output of Icondensation is then used to
identify precisely the 2D position of the marker. If
the posture is 0 (closed hand), the marker is given by
the centre of the projection of the 3D palm.
Otherwise, we identify the fingertip projecting the
palm on the image and using it to mask the region
corresponding to the forefinger. In case the posture
is 2, the connected component of interest is the one
overlapping the projection of the 3D ellipsoid
corresponding to the forefinger. Identification of the
marker position is based on the analysis of the local
curvature of the boundary of the obtained region.
The farthermost point at maximal curvature away
from the centre of the projection of the palm is taken
as the 2D position of the fingertip. An example can
be seen in Figure 7.
A FAST AND ROBUST HAND-DRIVEN 3D MOUSE
571

2.2.4 Merging
The merging process involves two steps:
• A reconstruction step, where the 3D
position of the marker and the hand posture
are reconstructed on the base of the
information evaluated from the left and
right images
• A data filtering step, where a Kalman filter
is used to smooth the noise in the extracted
data
Regarding the first step, the hand posture is
evaluated by means of the following voting scheme:
Table 1: The voting scheme used to evaluate the hand
posture.
012
0
012
1
112
2
222
Left Camera Pose
Right
Camera
Pose
As a matter of facts, one or more fingers can be
hidden in one image, but visible in the other. If the
posture number indicates the number of extended
fingers, our voting scheme will choose the maximal
value identified for left and right posture.
When the posture is 0 or when the forefinger is
visible in both images, the 3D marker position is
evaluated intersecting the lines back projection in
3D the marker positions on the image planes from
the corresponding optical centres. The line equation
is evaluated by pseudo inverting the projection
matrix. Due to the noise introduced by the previous
reconstruction processes, the lines unlikely intersect
each other. So we choose as intersection the point at
minimal distance from both lines.
When a reference point, such as the fingertip in
our example, is visible in only one image, the
marker position can be reconstructed in the
following way. First, we assume that the forefinger
tip lies on the principal plane of symmetry of the
hand. Then we extract the orientation of this plane,
P, from the model corresponding to the image where
the forefinger is visible. Finally, we take the plane P’
parallel to P and passing through the 3D position of
the palm centre and we intersect it with the line back
projecting the visible forefinger tip.
3 SYSTEM EVALUATION
The proposed hand tracking device has been
implemented and tested on a PC with an Intel
DualCore E6600 CPU, 1GB of RAM. The frame
grabber used for image capturing is a cost-effective
PCI capture board and guarantees an overall 240
color frames per second. The system includes two
color cameras, with maximal frame rate of 50 fps,
and 752x582 color images. According to the
literature on the subject and referring to the available
commercial products, the device can be evaluated
according to a set of desirable characteristics.
3.1 Robustness
For robustness we mean the quality of being able to
cope well with variations in the operating
environment with minimal loss of functionality.
Initialization and Re-initialization. Since the hand
is continuously entering and exiting the active area,
the system must guarantee a robust identification of
the hand presence. In a single image stream, when
the hand is tracked, the CAMShift algorithm
provides useful information on the object identified
in order to understand when it exits the image. At
the same time, Mean shift can recover very
efficiently the object as soon as it enters again the
image. Distributing casually the search window over
the image allows easily to “hook” the object and
then to identify its position. Therefore, we can state
that the system provides robust initialization and re-
initialization of the tracking components at thread
level, which is reflected into the robustness of the
two integrated streams.
Cluttered Backgrounds. The system is not sensible
to non uniform backgrounds or moving objects,
unless their chromatic distribution is not similar to
the one of the tracked object. Examples can be seen
in Figure 3 and Figure 4, where a complex
background is present. Some small groups of pixels
not belonging to the hand can be present in the
probability image, but they are discarded during
segmentation. For skin-like objects entering the
image, such as leather tissues, we stress that the
CAMShift algorithm is very robust against
distracters. Once CAMShift is locked onto the mode
of a colour distribution, it will tend to ignore other
nearby but non-connected distributions.
It is true, however, that some problems can be
caused when the disturbing object and the hand form
a connected component or when a disturbing object,
whose area is bigger then the identification
threshold, is detected in the image when no hand is
present. This produces false hand identification.
Independence from Illumination. The system is
guaranteed to work for a wide range of variations of
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
572
illumination intensity since the segmentation process
is theoretically independent from the illumination
conditions. However, if the global illumination falls
below a certain threshold, the segmentation
algorithm does not give good results anymore. The
same problem happens when the global level of
illumination is too high, for instance for direct
sunlight hitting the working area, since the camera
saturates.
3.2 Computational Manageability
The machine used during the test can be considered
as a medium cost processing unit (the complete
system, including capture board and camera has a
cost lower than 1.500€). Processing the image
streams at a frame rate of 25 frames/sec, the mean
latency is 20ms, and each single CPU is used at 30%
of its capacity. The maximal mean update rate of 50
updates/sec. A faster computational unit guarantees
to run the system reliably at 50 Hertz, which is
adequate to the frequencies of normal gestures in
human-computer interaction.
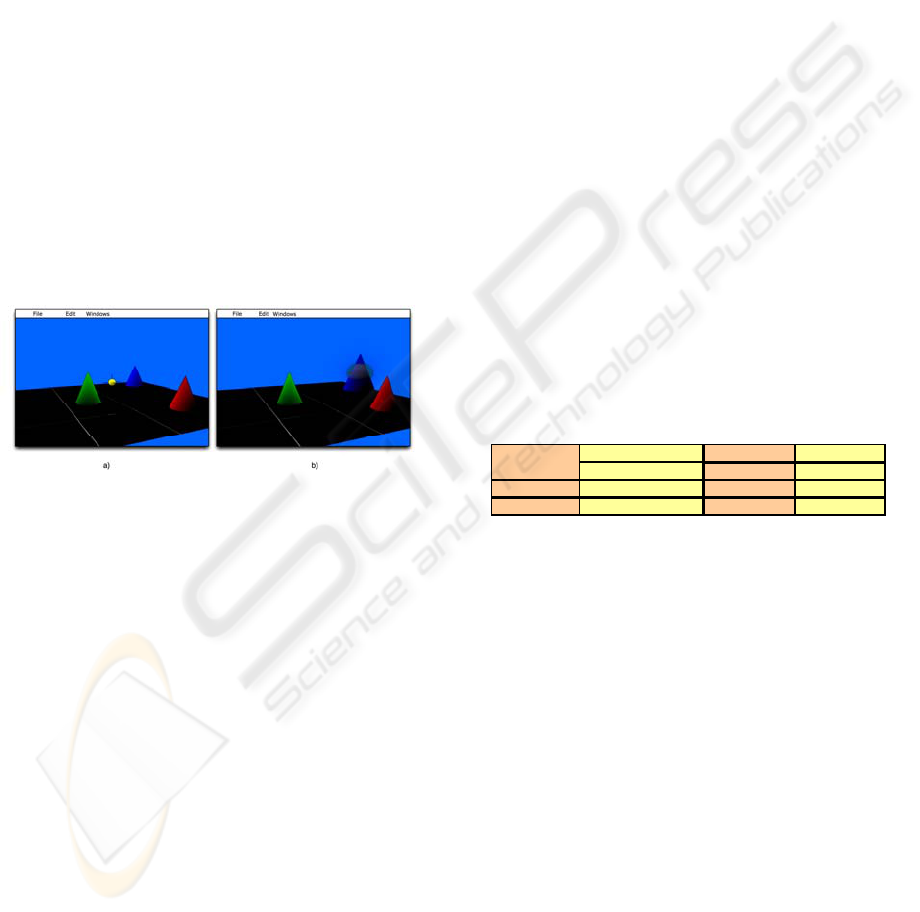
Figure 8: a) The test application. b) Selecting and moving
3D objects.
We developed, for test purpose, a simple VR
application shown in Figure 8. The user can move
the pointer (represented by a sphere), select and drag
objects around the virtual world and change the
user’s view (see Figure 1 for a schematic
representation). When the VR application is running
another 25% of a single core is used. This
demonstrates that there are resources available for
other tasks, and that the system can be effectively
used as an input device for other applications.
3.3 Performances of the HT System
Ground truth data was used to derive a quantitative
measure of tracker’s accuracy. Taken a grid of
points whose 3D position is known, the accuracy can
be evaluated through the difference between the 3D
positions reconstructed from the 2D projections of
the reference points and the ground truth data. Since
the accuracy is not constant, the reference points
must be located throughout the active area, in order
to evaluate a mean accuracy value. As a result, we
obtain an accuracy of 1.40 mm RMS.
The resolution is the minimal difference between
two 3D positions detectable as different from the
tracker that is when their projections on the image
planes are different, the minimal distance being one
pixel. Therefore the resolution is given by the ray of
the sphere enclosing all the 3D points obtained by
back projecting 2D image points at one pixel
distance point with the reference projection. Also the
resolution is not uniform in the active area and the
punctual resolution is computed and averaged over
the set of reference points. The obtained mean
resolution is 0.79 mm RMS.
Jitter and drift can be computed by placing the
forefinger in a fixed position and computing the
standard deviation of the reference position. The
resulting jitter is 0.46 mm RMS, and the drift is null.
The last result comes from the fact that none of the
algorithms used introduce any drift in its output. It
should be also outlined the fact that the jitter is
lower then the tracker resolution, producing a stable
output.
The characteristics of the tracker are summarized
in Table 2. These results show that the tracker
provides a sufficient precision for many
applications.
Table 2: Summary of tracker characteristics.
spatial position (3)
Jitter
0.4 mm RMS
hand posture (1)
Drift
none
Accuracy
1.4 mm RMS
Latency
20 ms
Resolution
0.8 mm RMS
Update Rate
>25 Hz
Tracker
data
4 CONCLUSIONS
In this paper we have proposed a novel hand
tracking system that can be used as object
manipulation interface to use the bare hand for
navigation, selection and manipulation tasks in
virtual environments. The system is non intrusive,
and reconstructs the position of a 3D marker and
simple hand postures using two separate image
streams. Each stream is processed separately with a
monoscopic algorithm, which is very robust against
noise and cluttered backgrounds. This allows
reducing computing times parallelizing the
processing of the two streams on multi-core or
multi-cpu machines. Information from the two
image planes are then combined in order to
reconstruct the required 3D data.
The system has been implemented, and the tests
demonstrates that it can run in real time (up to 50
A FAST AND ROBUST HAND-DRIVEN 3D MOUSE
573

samples per second) on today’s desktop computer
using off-the-shelf hardware components. Moreover,
the device uses only the 30% of the computing
resources, allowing the execution on the same
machine of other applications. As for precision, the
results are satisfactory, showing an accuracy of
1.4mm, a resolution of 0.8mm and a jitter of 0.4
mm.
At present, the system requires that only one
hand is present in the active area. As future work,
we are planning to expand the system in order to use
both hands for interaction.
REFERENCES
Akyol S., Alvarado P., 2001. ‘Finding Relevant Image
Content for mobile Sign Language Recognition’,
Proc. Signal Processing, Pattern Recognition and
Application, pp. 48-52
Bottino A., Laurentini A., 2007. ‘How to Make a Simple
and Robust 3D Hand Tracking Device Using a Single
Camera’, CSCC 2007, Agios Nikolaos, Greece.
Bray M., Koller-Meier E., Van Gool, L., 2004, ‘Smart
particle filtering for 3D hand tracking’, Proc. IEEE
Intern. Confer. on Automatic Face and Gesture
Recognition, pp. 675 – 680
Bradski G. R., 1998. ‘Computer Vision Face Tracking For
Use in a Perceptual User Interface’, Intel Technology
Journal (2), pp. 215.
Chen F.-S., Fu C.-M., Huang C.-L., 2003. ‘Hand Gesture
Recognition Using a Real-Time Tracking Method and
Hidden Markov Models’, Image and Vision
Computing vol. 21, August, pp. 745-758
Cheng Y., 1995. ‘Mean shift, mode seeking, and
clustering’, IEEE Trans. PAMI., vol. 17, pp. 790-799
Cui Y., Weng J., 2000. ‘Appearance-Based Hand Sign
Recognition from Intensity Image Sequences’.
Computer Vision Image Understanding, vol. 78,
February, pp. 157-176
Drummond T., Cipolla R., 2002. ‘Real-time visual
tracking of complex structures’. IEEE Trans. PAMI,
vol. 24, July, pp. 932–946.
Erol A., Bebis G., Nicolescu M., Boyle R. D., Twombly
X., 2007. ‘Vision-based hand pose estimation: A
review’. Computer Vision and Image Understanding
vol. 108, pp. 52–73
Gumpp T., Azad P., Welke K., Oztop E., Dillmann R.,
Cheng G., 2006. ‘Unconstrained Real-time Markerless
Hand Tracking for Humanoid Interaction’. Proc. of
6th IEEE-RAS Intern. Conf. on Humanoid Robots, pp.
88-93
Haiting Zhai, Xiaojuan Wu, Hui Han, 2005. ‘Research of
a Real-time Hand Tracking Algorithm’. Proc. of
ICNN&B 2005
Heap T., Hogg D., 1996. ‘Towards 3D hand tracking using
a deformable model’, Proc. of International
Conference on Automatic Face and Gesture
Recognition, pp. 140-145
Isard M., Blake A., 1998. ‘CONDENSATION -
conditional density propagation for visual tracking’,
Int. J. Computer Vision, vol. 29, pp. 5-28
Isard M., Blake A., 1998. ‘ICondensation: Unifying Low-
Level and High-Level Tracking in a Stochastic
Framework’, Proc. ECCV98, pp. 5-28
Letessier J., Bèrard F., 2004. ‘Visual tracking of bare
fingers for interactive surfaces’, Procs. of UIST ’04:
17th Annual ACM symposium on User Interface
Software and Tec
Liu N., Lovell B., Kootsookos P., 2003. ‘Evaluation of
hmm training algorithms for letter hand gesture
recognition’, Proc. ISSPIT 2003, Darmstadt, Germany
Liu Y., Jia Y., 2004. ‘A Robust Hand Tracking and
Gesture Recognition Method for Wearable Visual
Interfaces and Its Applications’, Proc. of 3rd Int. Conf.
on Image and Graphgics IEEE
Mahmoudi F., Parviz M., 2006. ‘Visual Hand Tracking
Algorithms’, Geometric Modeling and Imaging--New
Trends, vol. 5/6, pp. 228 – 232
Oka K., Sato Y., Koike H., 2002. ‘Real-time tracking of
multiple fingertips and gesture recognition for
augmented desk interface systems’, Proc of FGR ’02,
p. 429.
Olafsdottir, H. et al. Is the thumb a fifth finger? A study of
digit interaction during force production tasks. Exp
Brain Res (2005) 160: 203–213
Open Computer Vision Library, [on-line], Available:
http://sourceforge.net/ projects/opencvlibrary/
Pantrigo J.J., Montemayor A.S., Sanchez A., 2005. ‘Local
search particle filter applied to human-computer
interaction’, Proc. of ISPA’05, pp. 279 - 284
Shan Lu, Metaxas D., Samaras D., Oliensis J., 2003.
‘Using multiple cues for hand tracking and model
refinement’, Proc. IEEE Conf. on Computer Vision
and Pattern Recognition 2003, vol. 2, pp. 443-450.
Shan C., Wei Y., Tan T., Ojardias F., 2004. ‘Real time
hand tracking by combining particle filtering and
mean shift’, Proc. FG2004, pp. 669-674
Stenger B., Mendonca P.R.S., Cipolla R., 2001. ‘Model-
based 3D tracking of an articulated hand’, Proc. IEEE
CVPR 2001 vol. 2, pp. II-310 - II-315
Stenger B., Thayananthan A., Torr P. H. S., Cipolla R.,
2004. ‘Hand pose estimation using hierarchical
detection’, Proc. of Intl. Workshop on Human-
Computer Interaction 2004.
Tomasi C., Petrov S., Sastry A., 2003. ‘3D Tracking =
Classification + Interpolation’, Ninth IEEE
International Conference on Computer Vision, vol, 2,
pp. 1441–1448
Yang Liu, Yunde Jia, 2004. ‘A robust hand tracking for
gesture-based interaction of wearable computers’,
Proc. ISWC 2004, pp. 22 - 29
Yang Liu, Yunde Jia, 2004. ‘A robust hand tracking and
gesture recognition method for wearable visual
interfaces and its applications’, Proc. International
Conference on Image and Graphics ICIG 2004, pp.
472 – 475
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
574
