
THE MASKLE: AUTOMATIC WEIGHTING
FOR FACIAL ANIMATION
An Automated Approach the Problem of Facial Weighting for Animation
Alun Evans, Marco Romeo, Marcelo Dematei and Josep Blat
Barcelona Media – Centre d’Innovació / Universitat Pompeu Fabra, Av. Diagonal 177, planta 9, 08018 Barcelona, Spain
Keywords: Facial animation, Automated animation, Weighting.
Abstract: Facial animation of 3D characters is frequently a time-consuming and repetitive process that involves either
skeleton-rigging or pose-setting for morph targets. A major issue of concern is the necessity to repeat
similar tasks for different models, re-creating the same animation system for several faces. Thus there is a
need for reusable methods and tools that allow the introduction of automation into these processes. In this
paper we present such a method to assist in the process of facial rigging: the Maskle. Based upon the
standard bone-weight linear skinning animation technique, the desired distribution of vertex-movement
weights for facial animation is pre-programmed into a low-resolution, generic facial mask. This mask, or
‘Maskle’, is then semi-automatically overlaid onto a newly created face model, before the animation-weight
distribution is automatically transferred from the Maskle to the model. The result is a weight-painted model,
created semi-automatically, and available for the artist to use for animation. We present results comparing
Maskle-weighted faces to those weighted manually by an artist, which were treated as the gold standard.
The results show that the Maskle is capable of automatically weight-painting a face to within 1.58% of a
manually weighted face, with a maximum error of 3.82%. Comparison with standard professional automatic
weighting algorithms shows that the Maskle is over three times more accurate.
1 INTRODUCTION
The goal of facial animation for 3D models is to
enable the representation of emotions and
expressions in a plausible manner. Since pioneering
work in the field was first published over 25 years
ago (Parke, 1982), a large of amount of research has
been carried out on the development of
computational models of the human face. The
ultimate goal for this research is a system that 1)
creates convincing animation, 2) operates in real
time, 3) is automated as much as possible and 4)
adapts easily to individual faces. While there has
been significant progress towards solving each of
these four matters individually, there has been
relatively little progress in developing techniques
that succeed in solving all four of the problems
simultaneously. It is with this goal in mind that we
present the first results of a novel method for
automatic bone-weight facial rigging, called the
Maskle. The motivation for the development of the
Maskle has two sources. The first is the amount of
time it can take an experienced artist to create a
simple animation on a 3D face model, even using a
powerful tool such as Autodesk’s Maya or 3DS
Max. The second is the multimedia industry’s
increasing need for reusable tools to assist in
production work, reflected by current research being
carried out by several EU-funded projects, for
example SALERO (SALERO, 2006). The concept
of the Maskle is a result of direct contact of
academic researchers with multimedia production
companies, and the results of the research are being
directly funnelled into the professional sector.
The main contribution of this paper is in the area
of facial animation, specifically towards automation
of the facial animation process. We show the results
of our initial tests which are designed to ascertain
whether the Maskle is a viable concept for use
within a professional production. The results
obtained show a mean error of only 2.63%, and have
led to the Maskle system being used already by our
production partners.
233
Evans A., Romeo M., Dematei M. and Blat J.
THE MASKLE: AUTOMATIC WEIGHTING FOR FACIAL ANIMATION - An Automated Approach the Problem of Facial Weighting for Animation.
DOI: 10.5220/0001753602330240
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-67-8
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
The techniques used for the rigging of 3D characters
to create convincing facial animation can be broadly
divided into two distinct areas. The first are those
that focus on mimicking the movement of the face
surface only, attempting only to replicate facial
poses using surface deformations (Guenter et al.,
1998; Kalra et al., 1992). The second are those that
model the anatomy of the face, attempting to
replicate the movement of bones and muscles within
a virtual framework (Lee et al., 1995; Platt and
Badler, 1981; Waters and Frisbie, 1995). Some of
the earliest work in facial animation represents this
split, with Parke’s work on the parameterisation of
faces balanced by Waters’ (Waters, 1987) attempt to
replicate facial movement by modelling the
movement of muscles. In the decades since this
pioneering work there has been considerable
research effort put into to generating realistic facial
animation, much of it reviewed in detail by Noh and
Neumann (1998) and Ersotelos (2008).
Of particular relevance are Lee et al.’s (1995)
efforts at digitising facial geometries and
automatically animating them through the dynamic
simulation of facial tissues and muscles. Their
approach was to construct functional models of the
heads of human subjects from laser-scanned range
and reflectance data. These models were then
extended with contractile muscles embedded within
a dynamic skin model. The result was automatic
animation of a human face from a scanned subject.
Noh and Neumann (Noh and Neumann, 2001)
made considerable advances within the field of
automatic character animation with their work on the
cloning of expressions. Their technique was one of
the first to directly address the problem of reusing
existing animations, and transferring them to newly
created virtual characters. After letting users select a
set of points of the surface of a model, their method
was able to transfer vertex motion vectors from a
source character to a target character, with the aid of
an automated heuristic correspondence search.
Orvalho et al. (Orvalho et al., 2006) extend this
concept by attempting to adapt a generic facial rig to
different facial models. The technique required
considerable labelling effort yet was able to find
corresponding points between source and target
faces. This point matching was then used as a basis
for the transfer of a complex, muscle-based facial rig
system, to enable the target face to replicate the
expressions provided by the base rig. Although this
technique is of some interest, the authors do no
present quantitative results, and only a few
qualitative images to prove the validity of their
method.
Despite these efforts, there is still substantial gap
in the state of the art that remains to be filled before
we reach a facial modelling system that fulfils all
four points mentioned above in section 1. In this
paper we present our efforts at addressing this gap,
with a highly automated system that is capable of
enabling artists to quickly create suitable facial
animation for a wide variety of face models.
3 THE MASKLE
3.1 Overview
The concept of the Maskle is to allow artists to
create a facial animation system once, yet be able to
re-apply it to as many characters as they desire. In
this sense, the keyword is that the system is
reusable. Unlike some of the related research
presented above, the goal of the system is not to
transfer an animation system from one face to
another; neither is it to automatically animate a face
based on a scan or photograph. Rather, it is designed
such that an artist can develop their own system of
facial animation and, once designed, quickly apply
this system to any number of characters that they
create.
The type of facial animation system that the
Maskle is based around is a standard bone-weight
system, where the deformation of the set of vertices
that form the skin of a model is controlled by the
movement of an underlying skeleton; the exact
movement of each vertex (proportional to the bones
of the skeleton) is represented by a set of numeric
proportions, or weights, assigned to each vertex. The
justification for basing our algorithm on a bone-
weight system, as opposed to other animation
systems such as blend shapes, is that the bone-
weight system can be abstracted to a number of
control points (representing the locations of the
bones); this abstraction facilitates the organisation of
weight-transfer algorithm presented below, and
allows rapid testing to ensure the results are
satisfactory.
Once an artist has created a character, bone-
weight animation of a face usually requires
extensive effort in accurately assigning, or painting,
the weights for each vertex and for each bone. This
can be done automatically, and many 3D design
packages such Autodesk Maya and 3DS Max have
such functionality, frequently based around using
envelope systems (Autodesk, 2007). However,
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
234

despite being generally successful at automatically
painting body areas where the skin can be tightly
bound to the bone (such as the arms or legs), these
existing systems are less suitable for facial rigs,
where the ‘bones’ of the face are rarely modelled on
the real-life bones of a skull. Thus, weight-painting a
newly designed character to fit an existing facial rig
becomes a labour intensive and time consuming
process, as there is little existing automation that can
be used.
The Maskle system directly addresses this
problem by using a pre-painted, low resolution mask
to automatically weight-paint a newly created face.
The initial step is for an artist to create a facial rig,
(according to individual requirements) for the
Maskle itself. Given this rig, the overall process
occurs as follows. After the user has marked a total
of ten specific marker points around the areas of the
lips and the eyes, the structure of the Maskle is
loaded. This structure consists of a low-resolution
facial ‘mask’, designed so that it will be able to wrap
around areas of a 3D face that are commonly used
for animation. The Maskle is then adjusted semi-
automatically so that it shrinks around the shape of
the face; a collision detection algorithm detects
when the Maskle has contacted the face and prevents
its further movement. Once the Maskle has wrapped
around the face, ray-face collision algorithms find,
for each vertex of the face model, the nearest point
on the surface of the mask, which is then used to
calculate the animation weight for each vertex of the
face mesh. The Maskle can then be deleted, leaving
the face surface bound to the bone rig, ready for
animation.
The mesh used to represent the Maskle can vary
in terms of its actual structure. However, for the
work presented in this paper, the Maskle structure
consists of a 90-vertex, 82-face, symmetrical
triangle/quad mesh. While it is designed to cover the
areas surrounding the lips and eyebrows; the precise
details of topology and dimensions are less relevant
due to the changes that it undergoes during the
process of fitting it to a target face (as explained in
section 3.2 below). The techniques presented in
sections 3.2 and 3.3 were developed using C++ and
Maya Scripting Language (MEL) to create a plug-in
for Autodesk Maya, due to it being one of the most
popular 3D modelling packages available. It has also
been ported to Autodesk 3DS Max, and the design
of the system is such that it is would be
straightforward to transfer it to other modelling and
animation tools such as Blender, or proprietary
software. The facial models used for testing and
evaluation are triangle/quad vertex-face models,
consisting of between 757 and 6603 vertices. Each
facial model must have a small gap between the
upper and lower lips to ensure correct weighting in
these areas (see below).
3.2 Automatic Fitting
To ensure that the animation weights for each vertex
are transferred as accurately as possible, it is
important that the Maskle fits closely over the face
model. More importantly, it is vital that the
equivalent areas of the mask and face model are in
close proximity; for example, the upper lip of the
Maskle must be in close proximity to the upper lip
of the face model. Failure to ensure this proximity
frequently results in errors in the transferring of
weights, for example, the upper lip of the face model
acquiring the weights from the lower lip of the
mask.
3.2.1 Initial Placement
Due to the wide variety of facial shapes and sizes
that can exist, for each face it is necessary to pre-
programme the Maskle with some figures that relate
to the scale of the model in question. Thus, the
fitting of the Maskle to the face is initialised by the
user manually marking ten vertices of the face: two
at the lateral boundaries of the lips; four along the
central axis of the face, marking the highest and
lowest vertices of both the upper and lower lip, and
four marking the inner and outer lateral points of
both eyes. While it is unfortunate that the user
should have to manually mark locations, the number
is substantially less than that required by similar
techniques (Orvalho et al. 2006).
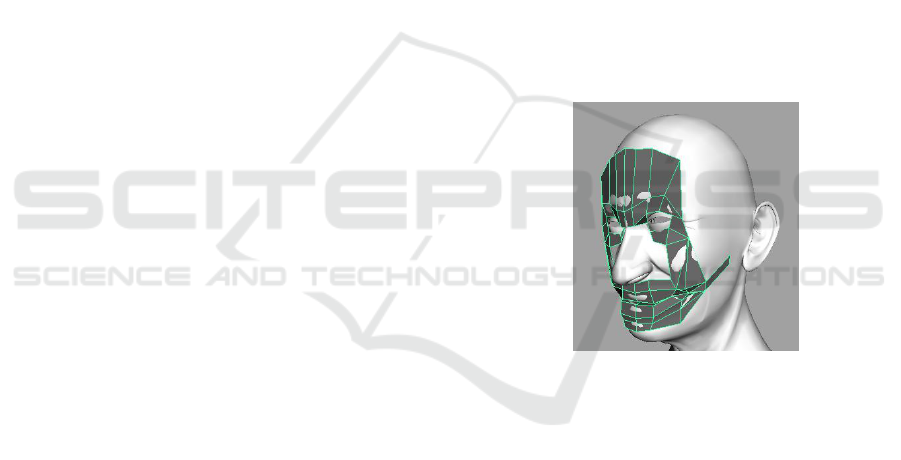
Figure 1: View of the Maskle system post-initialisation
step.
Once the vertices have been marked, the
respective distances between them are used to scale
the basic Maskle shape so that it has the same
THE MASKLE: AUTOMATIC WEIGHTING FOR FACIAL ANIMATION -
An Automated Approach the Problem of Facial Weighting for Animation
235
dimensions (e.g. the distance between nose and
mouth) as the face. The Maskle mesh is then loaded
and placed in front of the face model. It is almost
entirely flattened to a 2D plane, with only a ‘tongue’
extending into the mouth. This ‘tongue’ is present to
ensure that the Maskle will correctly cover the lips
of the face model; if it is not present the probability
of either lip being assigned the animation weight of
the other is much higher. The final placement of
Maskle is decided by the user, to ensure that the
‘tongue’ of the Maskle enters the mouth at the
correct angle. Figure 1 shows the position of Maskle
post-initialisation.
3.2.2 Automatic Shrinking
Following the initial placement, the Maskle
undergoes an automatic movement/shrinking
process which allows the shape of the Maskle mesh
to hug closely the shape of the target face mesh. The
basic system of movement is a curtailed version of
the dynamic force formulation for active surface
models (Sonka and Fitzpatrick, 2000). An iterative
process applies a combination of forces to each
vertex, the direction and magnitude of each force
contributing to the overall movement. This method
was preferred over direct correspondence techniques
as it allows the structure of the Maskle to change
dynamically as it is laid over the face model; also it
is very fast.
The location, x
i
, of each vertex, v
i
, moving
through time t can be calculated as
x
i
(t+1) = x
i
(t) + F
i
(t) (1)
The total force, F, applied to each vertex at each
iteration is dependent on two forces; α and β.
F
i
(t) = aα
i
(t) + bβ
i
(t) (2)
a and b are factors used to control the influence
of α and
β respectively. α
i
(t) is calculated according
to:
α
i
(t) = c
i
- x
i
(t) (3)
where c
i
is the average coordinate location of the set
of vertices adjacent to v
i
(i.e. the set of vertices that
are connected to v
i
by a single edge). β
i
(t) is
equivalent to the normalised vector representing the
initial (i.e. when t=0) direction of the ‘tongue’ of the
Maskle (as mentioned above in 3.2.1) and is
calculated using the relative locations of the relevant
vertices of the Maskle mesh. The effect of iteratively
applying equation (1) to the vertices of the Maskle is
that each vertex moves (in Euclidean space)
according to the direction and magnitude of the
resulting vector. Thus, the mesh moves towards the
face model (due to the influence of β) and wraps
around it (due to the influence of α). The termination
condition for the movement is partially applied when
the Maskle mesh collides with the face model mesh
(alternatively, the user may choose to manually
terminate the movement phase). Specifically, if a
Maskle triangle/quad collides with the face model,
the constituent vertices of the Maskle are flagged
and prevented from further movement. Once all the
vertices of the Maskle have been flagged, the
algorithm stops. Collision detection is carried out by
Moller’s triangle-triangle intersection test algorithm
(Moller, 1997), optimised by a standard axis-aligned
octree (Ericson, 2005), and run at each movement
iteration. Quad faces are split into two constituent
triangles for the purposes of collision detection.
Figure 2 shows an example of the result of the
completed movement.
Figure 2: Final position of the Maskle for weight transfer.
It is important to note that the results of the
automatic shrinking algorithm are dependent on the
accuracy of the initial placement (described above in
section 3.2.1). If the initial placement is incorrect,
the overall dimensions of the Maskle structure will
be incorrect, and the automatic shrinking algorithm
will not hug the face model correctly.
3.3 Weight Transfer
Now that the Maskle mesh has been placed adjacent
to the face model, its location can be used to recreate
an existing rig on the model (as mentioned in section
3.1 above, such a rig will have been already created
by the artist and applied to the Maskle). Firstly the
system of bones of the facial rig is re-created. Given
the location of a manually created ‘base’ bone, a
simple script recreates the bones of the rig, using the
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
236

locations of the vertices of the Maskle to ensure
correct placement. The exact form of this script will
depend on the number of bones that form part of the
facial rig which the Maskle is applying. The
animation weights for each vertex and for each bone
can now be set for the face model. For each vertex
of the face model, an infinite bi-directional ray is
projected along the axis of the Normal vector of the
model surface at that vertex. An intersection test
(Ericson, 2005) is carried out between this ray and
the faces of the Maskle. If successful, this test
defines an intersection point, p
I
, which lies on the
plane of a quad/triangle face of the Maskle. This
face is labelled f
I
. Recalling that the Maskle vertices
have been already weighted by the artist during the
creation of the original facial rig, the coordinates of
p
I
on the surface of the Maskle are then used to
interpolate the animation weights associated with the
constituent vertices of f
I
. The method used for this
interpolation is the Inverse Distance Weighting, or
“Shepard”, method, where the interpolated value is a
weighted average of the values of the surrounding
points (Amidror, 2002). The interpolated weight
values for p
I
are then assigned the vertex of the face
model from which p
I
was created. To increase
computational speed, the process is carried out for
only those vertices of the face model that lie within
the largest possible circumsphere that can be created
using the vertices of the Maskle mesh. The result is
that the weights for each bone are interpolated from
the vertices of the Maskle to the vertices of the face
model. The final step is to run a smoothing
algorithm (Autodesk, 2007) that ensures even
distribution of weights over the area of the face. The
artist is now free to animate the face as desired.
4 EVALUATION
An evaluation of the Maskle was carried out to
prove that the concept of the weight-transfer system
had validity. The difficulty in designing such a test
is increased due to the very nature of the work that
the Maskle is designed to facilitate i.e. animating a
face. Such work can be highly subjective, and it is
important to try and remove or negate any influences
that may introduce such subjectivity. For example,
the Maskle is designed to work with a variety of
facial rig designs, and any evaluation procedure
should be as independent as possible from these or
other variable elements that exist in the animation
pipeline.
To this extent we designed an evaluation
procedure that tests only the capability of the Maskle
to transfer the weights for the correct regions of the
face. An artist created a very simple, seven-bone
facial rig, and applied it manually to the Maskle and
to four different face models. We then commenced
the evaluation process by using the Maskle to
automatically transfer its associated rig to unrigged
copies of same four face models. The values
assigned to variables a and b in equation (1) were
deduced according to visual inspection of the
movement path of the Maskle mesh, and were set to
0.005 and 0.05 respectively. They were kept
constant for all tests. Such low values ensure slow
movement of the Maskle mesh and thus more
accurate collision detection.
The success of the Maskle weighting was
measured by comparing the animation weight
distribution of manually weighted face-model (the
gold standard) and the Maskle-weighted face model
(the test candidate). However, doing this for every
single vertex in the face model could have
introduced bias into the procedure. This is because
neither artist nor Maskle will have applied animation
weights to immovable facial features (e.g. the ear)
and so these vertices should not be allowed to bias
any mean comparison towards smaller error. Thus,
we isolated the set of vertices of the face model
whose Normal vector rays intersect with the Maskle
(as described in section 3.3) and label this set M,
where M = {m
i
}, i = 1, …, I. The difference
between the manually weighted set, M
Manual
and the
Maskle-weighted set M
Maskle
, for each of the seven
bones in the rig, can now be calculated thus:
I
mmabs
diff
I
Maskle
i
Manual
i
bone
∑
−
=
0
)(
where is the weight of the i
th
vertex of set
M
Manual
and is the weight of the i
th
vertex of
set M
Maskle
.
Manual
i
m
i
m
Maskle
The total average difference between M
Manual
and
M
Maskle
is then calculated by averaging diff
bone
over
each of the seven bones in the test rigs. As the goal
was to test the weight distribution (i.e. the spread of
weights for each joint across the mesh), the
differences between manual and automatic were
normalised according to the difference in maximum
weight spread.
As a comparison, an industry standard envelope-
based automatic skinning algorithm (Autodesk,
2007) was applied to the same four faces, and the
differences calculated in the same way (using the
same set of vertices). Figure 6 shows a table with the
THE MASKLE: AUTOMATIC WEIGHTING FOR FACIAL ANIMATION -
An Automated Approach the Problem of Facial Weighting for Animation
237
results as percentage of the total possible weight
(weight values range from 0 – 1, thus an average
weight difference of 0.5 means there is a gap
between the sets of 50% of the possible weight). The
face models have been labelled according to their
appearance.
Table 1 shows that the Maskle weighted face
achieves lower error rates in weighting all the test
models. When considering the mean figures, the
table shows that the Maskle is over three times more
accurate than the standard envelope algorithm.
Visual analysis of the results for each face shows an
even greater difference that the data in the table
illustrates, as the envelope based method deals very
poorly with the area of the lips, incorrectly
associating vertices of the upper lip to the bone of
the lower lip, and vice versa. The error can be seen
visually in Figure 4(c). Due to the nature of the
Maskle (specifically, the ‘tongue’ that divides the
upper and lower lips, this error is completely
removed.
Table 1: The mean differences between manually
weighted faces and automatically weighted faces. A
sample of each model is shown in Figures 4, 5 and 6.
Model Maskle
difference as %
of possible
weight
Envelope
difference
as % of
possible weight
Realistic
Human
1.58 8.43
Cartoon
Human
2.49 7.40
Cartoon
Devil
2.61 7.17
Venetian
Mask
3.82 11.92
Average 2.63 8.73
To illustrate this, Figure 3 consists of two graphs
that show the weight distribution profile for the
weights of the lower lip bone of one of the models
used in the study (the ‘Realistic Human’ model in
Table 1 and illustrated in Figure 4). Figure 3 (a)
shows a comparison between the manually weighted
face and the Maskle weighted face. The graph shows
that there the two sets of data overlap and that there
are very few vertices that are weighted in only one
of the sets. Figure 3 (b) shows a comparison
between the manually weighted face and the
envelope-algorithm weighted face. In this graph
there is less correlation between the datasets, and the
envelope algorithm has incorrectly weighted several
vertices which remain unweighted by the manual
operator. Further examples of animated faces
generated successfully using the Maskle can be seen
in Figures 4(b), 5 and 6.
5 DISCUSSION AND FUTURE
WORK
In this paper we have presented the concept of the
Maskle system and the results of a study on the
validity of using such a system. The novel
contribution is in the area of automation of facial
animation, with specific contribution in the
automated animation of areas of the face that are
time-consuming to animate manually, such as the
lips. The results show that the system used for this
study is capable of creating a facial rig that is, on
average, within 2.63% of being identical to that
created manually. This error rate is over three times
less than that obtained by carrying out the same tests
on a standard envelope-based weighting algorithm.
The Maskle is a novel idea of automatically
recreating a facial animation system on a variety of
face models, and addresses this issue in a way that is
different to work previously published; thus, it is
difficult to compare the obtained error rates with the
results published by other researchers. Perhaps the
most similar previous work is Orvalho et al.’s (2006)
efforts in transferring a facial animation system, yet
their work focuses strongly on transferring a rather
complex generic facial rig, and involves the user
manually marking 44 points landmark points. The
Maskle system is more flexible in that it can be used
with a variety of facial rigs, and only requires the
marking of ten landmark points. Unfortunately,
Orvalho et al. do not provide numerical results for
their technique, showing their results only in
graphical format, thus it is difficult to directly
compare the accuracy of the Maskle with their
results. Noh and Neumann (Noh and Neumann,
2001) presented statistics comparing the results of
the motion vectors for cloned expressions (i.e.
expression that are copied from a ‘source’ face to a
‘destination’ face). Again, this is difficult to
compare to the results in this paper, as the Maskle
does not attempt to directly transfer expressions,
rather it is directly transferring movement weights to
allow artists to animate as they desire.
Due to the low error rates, analysis of graphs of
the type shown in Figure 3, and visual analysis of
the face models, our interpretation of the results
obtained in the study is that the Maskle is a tool
that can greatly aid the process of creating facial
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
238
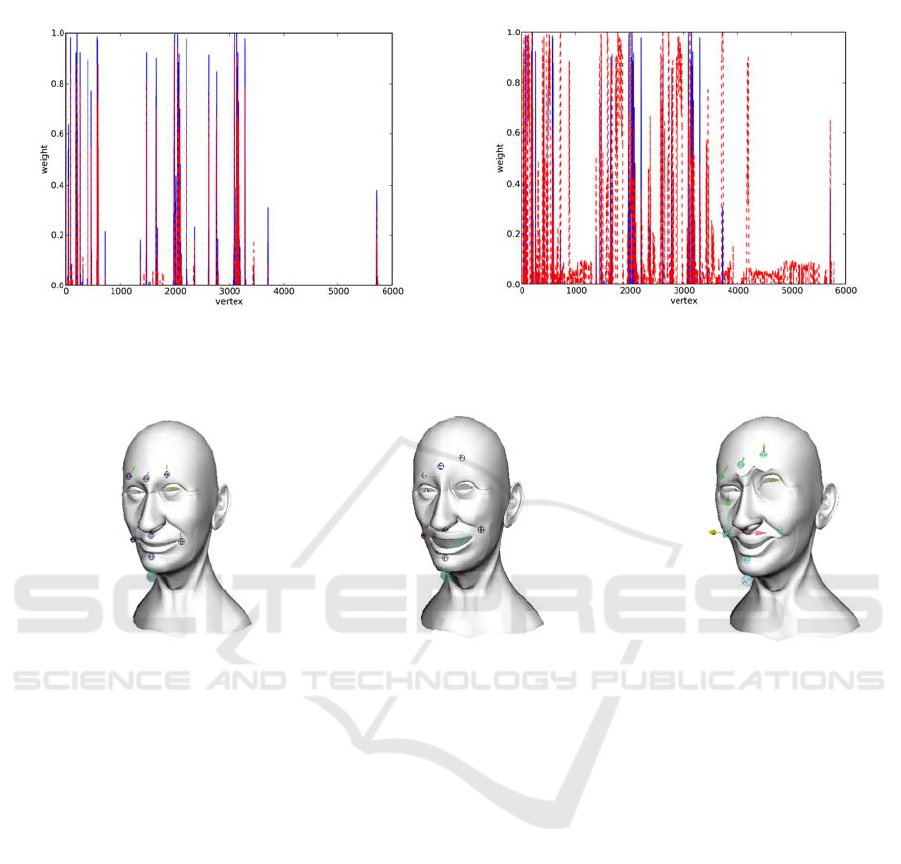
(a) (b)
Figure 3: Sample weight profiles for one bone of a manually-weighted face (blue line) and automatically weighted face (red
dashed line). Figure (a) shows the results for the Maskle, Figure (b) for the envelope algorithm. The envelope algorithm
shows a much greater level of noise and erroneous calculations.
(a) (b) (c)
Figure 4: Visual differences between Maskle-weighted and envelope-weighted faces, comparing a simple expression
created by moving the bones of the rig. (a) shows the unanimated face; (b) shows the expression applied to the Maskle-
weighted face; (c) shows the same expression applied to the envelope-weighted face.
animation for 3D characters. This being said, the
technique does have several limitations. The first is
that in its current state, the Maskle does not cover
certain areas of the face that are usually used in
animation e.g. the chin. The reason for this is that, in
practice, such areas are straightforward for even a
non-experienced artist to animate, and thus there is
little need for an automated tool to assist in this area.
By contrast the area around the lips is difficult and
time-consuming to animate, and it is this and other
similar areas in which the Maskle is of most use.
Nevertheless, in the interest of creating a more
comprehensive tool, our future work will involve
expanding the Maskle to cover other areas of the
face. A further limitation is in situations where the
face shape is very different to the structure of the
Maskle. The system works well with humanoid
faces, but has not yet been tested with animal,
fantasy, or highly abstract faces. There is also scope
for technical improvement by investigating different
methods of Maskle-face correspondence. While the
current method is adequate and fast, it does require
manual fine adjustment. Several other
correspondence techniques exist, and a study could
be carried out to see if using any of these improves
the system. Our immediate future work is to conduct
a more comprehensive evaluation study to measure
the impact of the use of the Maskle in real-life
animation situations, possibly recording the time that
it takes several artists to create a facial rig on several
characters, with and without the Maskle
Finally we also intend to combine the Maskle
with other facial animation work that is being
currently being conducted within our group, which
involves automatic creation of facial emotions
across a wide range of facial models. It is expected
that this further work will lead to a considerable
breakthrough in the field of automatic facial
animation, in which the Maskle system will play a
major role.
THE MASKLE: AUTOMATIC WEIGHTING FOR FACIAL ANIMATION -
An Automated Approach the Problem of Facial Weighting for Animation
239

(a) (b) (c)
Figure 5: Example of expressions successfully created using the Maskle on a cartoon character with pronounced features.
(a) is the unanimated face, (b) and (c) are expressions created after the Maskle has weighted the face.
Figure 6: Examples of expressions created on 3D models animated using the Maskle (images © Merja Nieminen, Crucible
Studio / University of Art and Design Helsinki 2008).
ACKNOWLEDGEMENTS
The authors would like to acknowledge the support
of the SALERO project http://www.salero.info.
REFERENCES
Amidror, I. 2002. Scattered data interpolation methods for
electronic imaging systems, a survey, Journal of
Electronic Imaging, 11, 2, 157-176.
Autodesk Maya Press. 2007. Learning Autodesk Maya
2008: The Modeling & Animation Handbook. Sybex.
Ericson,
C. 2005. Real-time Collision Detection. Morgan
Kaufmann.
Ersotelos, N. and Dong, F. 2008. Building highly realistic
facial modeling and animation: a survey, The Visual
Computer, 24, 13-30.
Guenter, B., Grimm, C., Wood, D., Malvar, H., and
Pighin, F. 1998. Making Faces, In Proceedings of
ACM SIGGRAPH 1998, 55-66.
Kalra, P., Mangili, A., Thalmann, N., and Thalmann, D.
1992. Simulation of Facial Muscle Actions Based on Rational
Free From Deformation. Eurographics, 11, 3, 59-69.
Lee, Y., Terzopoulos, D., and Waters, K. 1995. Realistic
Modeling for Facial Animation. In Proceedings of
ACM SIGGRAPH 1995, 55-62.
Lee, Y., Terzopoulos, D., and Waters, K. 2002. Realistic
Face Modelling for Animation. In Proceedings of
ACM SIGGRAPH 1995, 55-62.
Möller, T. 1997. A fast triangle-triangle intersection test,
Journal of Graphics Tools, 2, 2, 25-30.
Noh, J. and Neumann, U. 2001. Expression Cloning, In
Proceedings of ACM SIGGRAPH 2001, 277-288.
Noh, J. and Neumann, U. 1998. A survey of facial
modeling and animation techniques, USC Technical
Report.
Orvalho, V., Zacur, E., and Susin, A. 2006. Transferring a
Labeled Generic Rig to Animate Face Models, Lecture
Notes in Computer Science 4069, 223-233.
Parke, F. 1982. A parameterized Model for Facial
Animation, IEEE Computer Graphics and
Applications, 2, 9, 61-68.
Platt, S., and Badler, N. 1981. Animating Facial
Expressions. Computer Graphics, 15, 3, 245-252.
SALERO. 2006. http://www.salero.info/.
Sonka, M and Fitzpatrick, J. 2000. Handbook of Medical
Imaging, Vol. 2 Medical Image Processing and
Analysis. SPIE Press.
Waters, K. 1987. A Muscle Model for Animating Three-
Dimensional Facial Expression, Computer Graphics,
21, 4, 17-24.
Waters, K., and Frisbie, J. 1995. A coordinated Muscle
Model for Speech Animation, Graphics Interface,
163-170.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
240
