
PARALLEL LOSSY COMPRESSION FOR HD IMAGES
A New Fast Image Magnification Algorithm for Lossy
HD Video Decompression Over Commodity GPU
Luca Bianchi, Riccardo Gatti, Luca Lombardi
Computer Vision Lab, University of Pavia, Via Ferrata 1, Pavia, Italy
Luigi Cinque
Department of Computer Science, University of Roma “La Sapienza”, Via Salaria 113, Roma, Italy
Keywords: GPU, Image compression, Parallel algorithms.
Abstract: Today High Definition (HD) for video contents is one of the biggest challenges in computer vision. The
1080i standard defines the minimum image resolution required to be classified as HD mode. At the same
time bandwidth constraints and latency don’t allow the transmission of uncompressed, high resolution
images. Often lossy compression algorithms are involved in the process of providing HD video streams,
because of their high compression rate capabilities. The main issue concerned to these methods, while
processing frames, is that high frequencies components in the image are neither conserved nor
reconstructed. Our approach uses a simple downsampling algorithm for compression, but a new, very
accurate method for decompression which is capable of high frequencies restoration. Our solution Is also
highly parallelizable and can be efficiently implemented on a commodity parallel computing architecture,
such as GPU, obtaining extremely fast performances.
1 INTRODUCTION
From the beginning of multimedia era bandwidth
and memory issues, together with poor video
resolution for TV screens, constrained all standards
for digital video to a resolution of 720x540 pixels.
Broadband internet connections and affordable
prices for memories and displays made available
higher resolutions for video contents in the last few
years. Today the request for higher resolution
content is rising at an amazing rate. Due to the
incredible low cost of consumer electronics, HD
devices for playback are now really inexpensive, but
still many challenges have to be faced: a lots of
standard definition videos are still available and
need to be displayed on HD displays, high resolution
cameras prices still remain high and bandwidth
constraints don’t allow uncompressed transmission.
This means that both decompression and
magnification methods are involved in the process.
Another significant issue, concerned to these
solutions is that often lossy methods are employed to
achieve best compression, taking final images to
poor quality and aliasing effects. Several works
demonstrate that this accuracy reduction is mainly
due to high frequencies loss. We focused our
attention to downsampled images, accounting the
compression step only by a simple algorithm for
image size reduction. We decided not to involve
complex compression methods maintaining as
compressed image a file which still has some
similarities with original image. This choice was due
to the need for flexibility: using as compressed
image a downsampled version of real one, makes
our solution suitable for future works in pre-filtering
or feature extraction without any needing for
decompression. Another interesting aspect of this
approach is that compressed images from HD
streams and legacy low resolution movies are treated
in the same way, making them both a suitable input
for our system. The key phase of this proposed
method is obviously the image magnification
algorithm. We then developed a fast, accurate
magnification algorithm, able to reconstruct high
frequency components (i.e. edges) of original image.
16
Bianchi L., Gatti R., Lombardi L. and Cinque L. (2009).
PARALLEL LOSSY COMPRESSION FOR HD IMAGES - A New Fast Image Magnification Algorithm for Lossy HD Video Decompression Over
Commodity GPU.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 16-21
DOI: 10.5220/0001767900160021
Copyright
c
SciTePress
We started our work considering one of the most
employed magnification methods is bilinear
interpolation but, as is shown in the next paragraph,
resultant images are often blurry and the quality is
not acceptable for our purposes, because no adaption
is performed to manage edge crossing.
Paragraph 2 presents the state of the art in image
magnification for video contents, discussing about
usually employed algorithms. In section 2.2 some
interesting results providing acceptable quality are
presented, but their computational cost makes them
unusable for real time video. Paragraph 3 introduces
SIMD architecture and presents some useful results
in HPC which can help looking for a solution and
explains why they can’t be used in known
algorithms. In paragraph 4 our solution, which can
address both accuracy and speed issues, is shown.
After this, paragraph 5 presents algorithm speed and
quality performances. Also an error estimation
method is proposed to evaluate the effective
capabilities of the algorithm against bilinear
interpolation, the only one which could compute in
real-time. Last paragraph reports conclusion and
some ideas we would like to investigate in the near
future.
2 STATE OF THE ART
Usually we have to face with a common drawback
which puts magnification accuracy on one side and
speed on the other. In this paragraph the two
different approaches are shown. In the last section
some words about High Performance Computing
(HPC) techniques are spent to present a way that,
under certain hypothesis, could fulfil all our
requests.
It’s important to clarify that, independently from
the algorithm, image magnification means we have
to estimate colour values for new pixels inserted
between two or more following points in the source
image. Pixel estimation is fundamental because
impacts significantly on the resultant image. A
scarce and imprecise estimation, can introduce
components in colour space that doesn’t exist,
making decompressed image look like a distorted
version the original one. This process, means that,
given an unknown function (1) which represents
pixel value P, for a source image, a magnification
algorithm gives an estimation of starting from
some random generated samples.
,
,
,
(1)
2.1 Fast but not Accurate
Only two magnification algorithms are usually
employed for everyday real-time magnification:
bilinear (Yan, 1977) and bicubic (Gonzales, 1977)
interpolation. The first one is a fast and naive
approach which uses the approximation described in
(1), given an image expressed as a function I, and
considering only the x coordinate. This is a naive
approach capable of fast computation, but its main
drawback is the lack of precision, which provides
poor quality images introducing many blurring
artefacts.
,
2
(2)
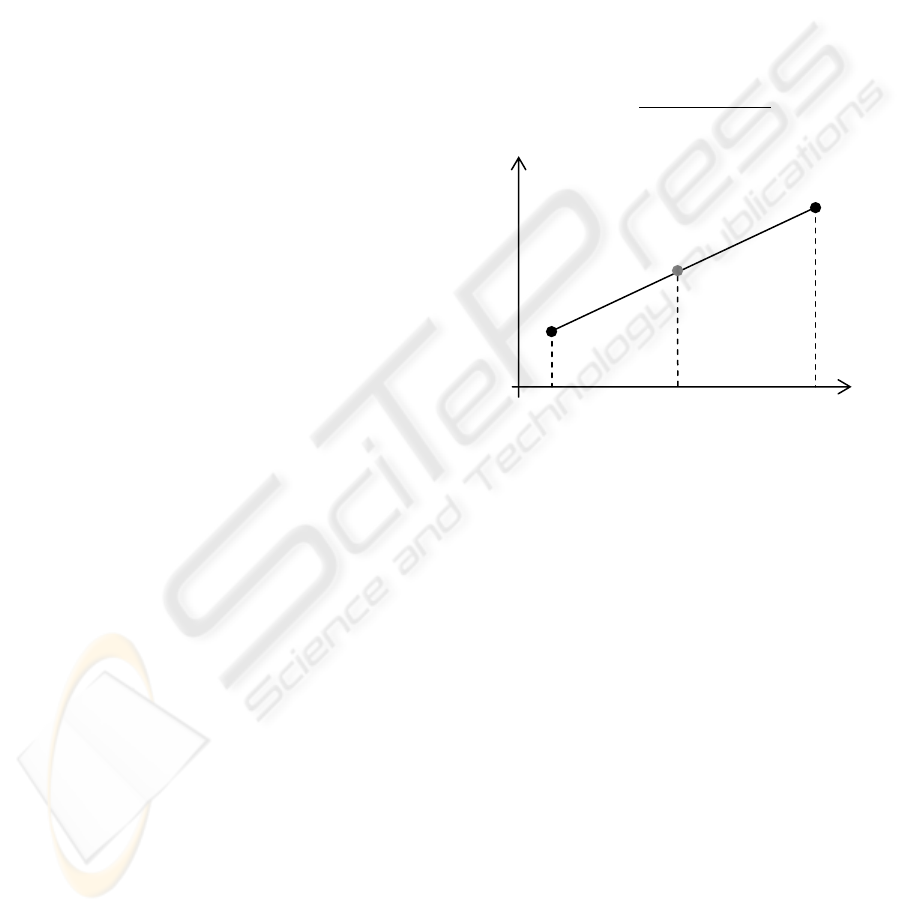
Figure 1: Bilinear interpolation scheme: every new pixel is
defined using a linear function.
Bilinear interpolation uses the very strong
assumption of linear variation of pixel color
intensity in the magnified image (Figure 1). If we
consider colour space This is often inadequate in a
lot of real cases and shows its limits especially when
we have discontinuities in color intensity variation.
By this way the strong variation implied by an edge
inside the original image, is distributed during
magnification on every new inserted pixel in a
uniform fashion. This takes to strong reduction of
image frequency, where a discontinuity is
approximated by a linear function. The result is that
we introduce many unwanted smoothing artefacts,
due to imperfect estimation. This algorithm works
fine for quite uniform or for gradient varying
images.
Bicubic interpolation, takes to slightly
improvements because image spectrum is not but
again no knowledge about edge position is used.
Instead, bicubic interpolation uses a higher
neighbourhood than bilinear and a third order
interpolating function. Results are still unacceptable
for HD purposes.
I(x
B+1
)
x
k
x
k+1
P
I(x
k
)
PARALLEL LOSSY COMPRESSION FOR HD IMAGES - A New Fast Image Magnification Algorithm for Lossy HD
Video Decompression Over Commodity GPU
17
Using algorithms such these ones many relevant
features such as edges have their frequency reduced
are inadequate because act as a low-pass filter over
the image, introducing the aliasing effect shown in
figure 2.a and 2.b. The proposed algorithm is also
compared with the nearest neighbor technique for
image magnification in terms of proposed distortion
measure and similarity measure. Nearest-neighbor is
the simplest method of digital magnification. Given
an image of size w×w, to magnify it by a factor k,
every pixel in the new image is assigned the gray
value of the pixel in the original image which is
nearest to it. This is equivalent to repeating the gray
values k×k times to obtain the magnified image. The
resultant image for large magnification factors will
have prominent block like structures due to lack of
smoothness. This sure can in some way preserve
high frequencies, but edge distortions often occurs,
as shown in figure 2.c.
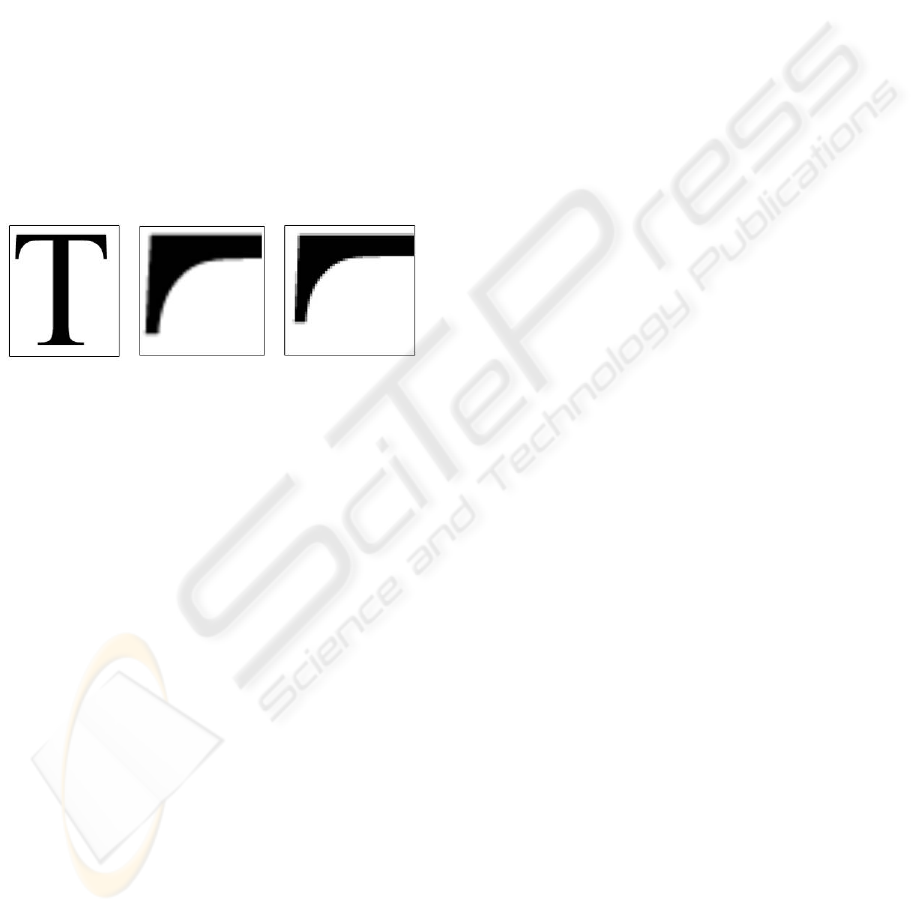
Figure 2: Image magnification (4X) using traditional
algorithms: original image (a), the aliasing effect produced
by bilinear algorithm (b) and the edge distortion
introduced by nearest neighbor (c).
2.2 Accurate and Expensive Image
Magnification
As edges are high spatial frequency features, they
strongly affect perceived image sharpness and
quality. If we assume that the low resolution image
is a sub-sampled version of the high resolution one,
an estimation of edge position is possible,
considering derives for a couple of pixels. This
spatial information can be used to reconstruct edges
and preserve high frequency points. Therefore, edge
estimation must be sub-pixel and the reconstruction
of the HR image must take into account the
estimation results. The idea consists of modifying a
common interpolation scheme, e.g. bilinear or
bicubic interpolation, to prevent interpolation across
edges.
Some solutions in literature involve iterative
algorithms such as fractals (Cheung-Ming, 2004) or
statistical methods (Sang, 2007) to detect edge
position. Unfortunately these methods aren’t capable
of a fast computation, especially due to their non
locality nature. This makes them unsuitable for real
time purposes.
The main idea behind these approaches is that an
edge, which could exist between two neighbor pixels
of the original image, can be easily estimated by an
iterative method. After this, magnified image pixels
values can be easily estimated with good accuracy.
These solutions produce less blurry images than
bilinear or bicubic interpolation, but usually require
a lot of time and can’t take advantage of efficient
parallel computation on commodity hardware.
Estimating edge positions without iterative
methods, then performing a reconstruction seems to
be the best choice for good accuracy and fast
computation.
In literature several magnification methods are
proposed (Keys, 1981) (Allebach, 1996) (Schults,
1992), but everyone uses edge information from low
resolution images. One significant result towards
accurate edge estimation is achieved by (Biancardi,
2001). In this work a method for edge estimation is
given by a convolution filter mask. The main idea
behind this solution is using an accurate center-on-
surround-off filter, which is equal to a mask
developed by the difference of two Gaussians.
Mask uniformity along every possible axis can
take to a convolution result which is direction-
independent. After this operation, considering two
following points in the original image, we will be
able to detect if moving from one to another, an edge
is crossed. This information is used to approximate
the edge by a sigmoid curve and, with knowledge
about derives value in the two original points, the
non-subsampled image is reconstructed. With these
result, an easy sampling process takes to magnified
image. If no edge is found, a bilinear interpolation is
performed.
The main issue concerned by this approach is
about computation performances. The algorithm is
very slow while performing enhancement. The most
of computation time is spent performing convolution
and calculating derives for sigmoid function.
Unfortunately, computational time of more than a
second per frame for a standard DVD image
resolution makes this method unsuitable for real
time purposes.
Performances could be improved using a parallel
computing approach (Cannataro, 2002) (Luebke,
2004), a well known technique in High Performance
Computing (HPC). The most interesting thing about
that is a speedup gain for computation which often
can be hundreds time faster than equivalent run over
CPU. Unfortunately for our needs, parallel
computing involves some strong constraints which
a
b
c
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
18

cannot be broken without heavily compromising
computation gain. One of the most important of
these constraints is the use of local data for
processing. Localization is meant both in reading
and writing data. This is not true for (Biancardi,
2001) where 4 points neighbourhood is not enough
for derives estimation, so image cannot be broken
into n four points subset. We started from this point
to develop our magnification algorithm which was
required to fulfil every parallel computing
constraint.
3 GPGPU FOR MAGNIFICATION
Since many years GPUs have evolved toward a
general purpose architecture. This idea was
supported by the adoption of a stream processing
SIMD architecture which could perform a single
instruction on multiple data in a single execution
step (Akenine-Moller & Haines, 2002).
GPGPU figures out how to use the graphical unit
for general elaborations, in an efficient way. Parallel
image elaborations were one of the first algorithms
developed using graphic cards for general purposes.
The advent of Computer Unified Device
Architecture (CUDA) allowed a more efficient
approach to image elaboration and important
improvements such as separable convolution
(Podlozhnyuk, 2007) were found to provide even
faster computation than traditional GPGPU
approach.
One of the most significant limits of GPGPU
efficiency is that it is still constrained by graphics
concepts and computing is done using graphic
hardware as a black box. This takes to the fact that
each stream processor (a SIMD module on the GPU)
should work alone without sharing data from another
processor.
4 A FAST ALGORITHM FOR
IMAGE DECOMPRESSION
Efficient algorithm parallelization is very difficult
and often not possible. The proposed solution is
developed starting from (Biancardi, 2001) moving to
a SIMD architecture. We preserved the main idea of
edge estimation, to detect pixels colour and built an
algorithm suitable for our real-time purposes. Our
algorithm, named IMAF, uses a convolution edge
detection which performs convolution with two
uniform radial mask. Each mask has a defined
weight, different size and opposite sign.
Using two different convolution masks allow
efficient parallelization of filtering algorithm and
takes to improved efficiency. Following the idea
exposed in (Podlozhnyuk, 2007), each mask has
been expressed splitted into two array, to define a
separable filter mask. This technique made our
double convolution to compute in a more efficient
way, performing coalesced sequential accesses to
image, stored in shared memory. Coalesced memory
accesses are the best solution to reach optimization
over a SIMD architecture (nVidia, 2008).
Separable filters are a special type of filter that
can be expressed as the composition of two one-
dimensional filters, one on the rows on the image,
and one on the columns. A separable filter can be
divided into two consecutive one-dimensional
convolution operations on the data, and therefore
requires only n + m multiplications for each output
pixel. Using this approach the requirement for data
locality, fundamental in SIMD algorithms has been
addressed.
The other critical part in image magnification is
non sub-sampled image reconstruction and data
interpolation. The proposed solution takes account
of high frequency components preserving, by using
two different interpolation functions. The Sigmoid
Function, proposed in (Biancardi, 2001) was
discarded due to its computational costs in derives
estimation. Our algorithm simply detect if an edge is
highlighted by filtered image. This is easily
performed because considering two following
pixels, their corresponding value in our filtered
image is retrieved. If the product of these values is
negative, we can assert that in the original,
uncompressed image an edge is between them. Also
the position of this edge can be estimated, supposing
that pixel distance is constant and that between two
samples no more than an edge is crossed. If no edge
is crossed, corresponding pixels have the same sign
and a simple bilinear interpolation can be performed
with acceptable results. After edge position is
known, an interpolation function, accounting this
information has to be used. For this reason, we
defined a function for pixel colour estimation before
the edge and another after. Two first order functions
can be used, because no continuity in colour space
has to be addressed if an edge is crossed. Given two
following pixels A, B in compressed image and an
edge point between them detected by our filter, we
can describe our reconstruction function as follows.
We can define
and
respectively A and B
coordinates along one direction,
and
their
PARALLEL LOSSY COMPRESSION FOR HD IMAGES - A New Fast Image Magnification Algorithm for Lossy HD
Video Decompression Over Commodity GPU
19
values in color space and
detected edge point
coordinate along the same given direction. Colour
value
in
, is defined by equation (3) and
interpolating function is expressed by (4).
(3)
,
,
(4)
This function performs a linear interpolation
between A and edge point and from edge point to B,
respecting discontinuity of derives in colour space
due to high frequency components in edges as
described in Figure 3.
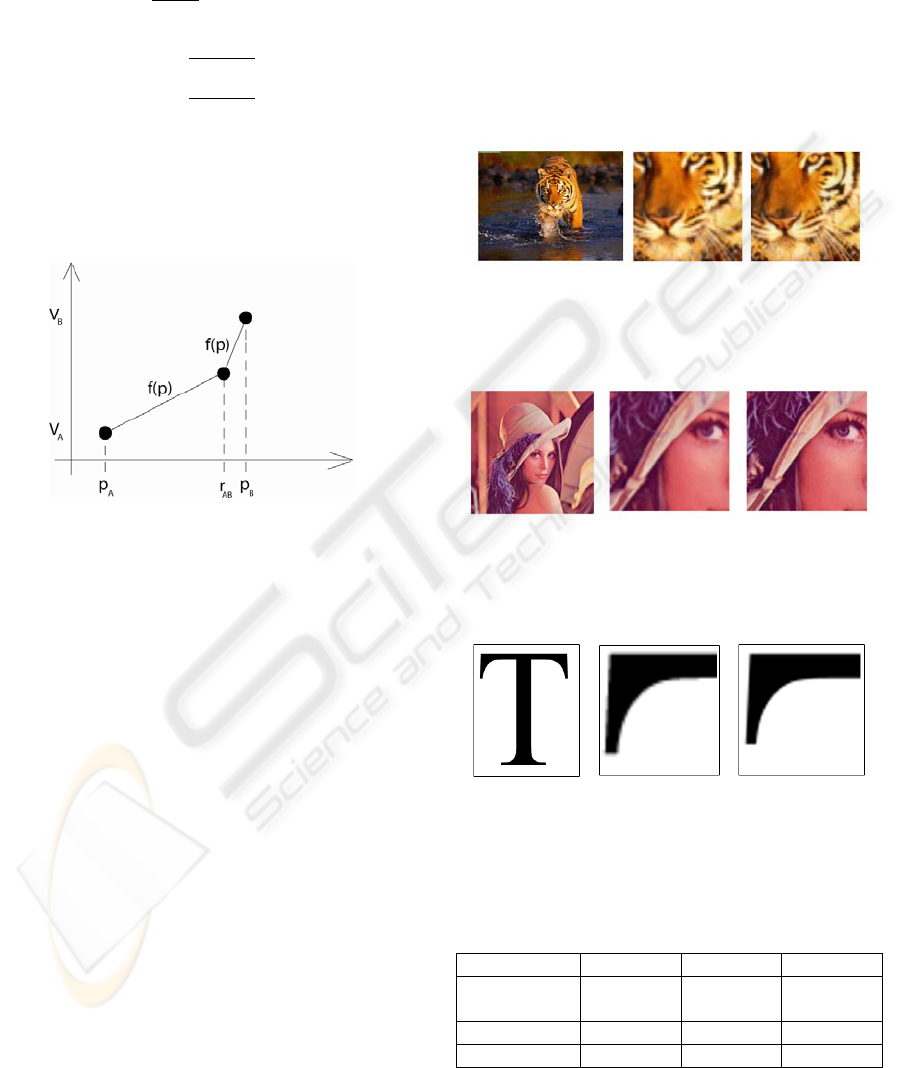
Figure 3: Interpolating function for high frequency
reconstruction.
This function performs interpolation first on
image rows and after on columns. These steps can
be easily parallelized because there are no data
constraints between them. A further parallelization is
done by processing many image pixel subsets at
same time. By this way a two level parallelization is
introduced, which should give best performances.
5 PERFORMANCE ANALYSIS
Evaluation has been computed on still images,
measuring correctness and execution time. To
demonstrate the capabilities of our method we chose
three particular test images, reported in figure 4, 5
and 6. The first two are substantially common
images, while the third one is a particular interesting
case where traditional approaches show their limits.
This is due to the presence in the image of high
frequency components. Original Image is assumed
to be the compressed data received from our stream.
In order to evaluate algorithms performances on
useful cases, an enhancement factor of 4X has been
considered. This is necessary to consider a solution
capable of providing HD content from highly
compressed images or standard 720x570 frames.
Algorithm efficiency can be measured by
evaluating execution time. The noticeable
improvement of the proposed algorithm respect to
bilinear interpolation is shown in Table 1.
We propose a method for precision estimation in
enhanced images. Starting from a high resolution
image, a 4x sub sampling is applied, then images are
magnified using both bilinear and IMAF algorithms.
Figure 4: subsampled image of 400x300 pixels is shown
in(a), a 4x magnification, using bilinear algorithm(b) and
our method which produces more defined images(c).
Figure 5: subsampled image of 512x512 pixels is shown in
(a), a 4x magnification, using bilinear algorithm (b) and
our method which produces more defined images (c).
Figure 6: An image of 400x500 pixels, with many high
frequency components (a), a 4x bilinear magnification
introduces many artifacts. IMAF algorithmprovides better
results (c).
Table 1: Execution times.
Fi
g
ure 4 Fi
g
ure 5 Fi
g
ure 6
Bilinear
interpolation
102 ms 112 ms 88 ms
IMAF CPU 111 ms 124 ms 98 ms
IMAF GPU 35 ms 38 ms 22 ms
a
b c
a
b
c
a
b
c
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
20

Table 2: Error Rates.
Fi
g
ure 4 Fi
g
ure 5 Fi
g
ure 6
Bilinear
interpolation
48,32% 36,95% 11,2%
IMAF CPU 37,9% 28,4% 5,8%
IMAF GPU 37,7% 28,3% 6,1%
Then error is computed subtracting original
image from magnified one and evaluating it respect
to source image. The evaluation results clearly
shows the quality of our approach. We are capable
of providing fast image magnification algorithm
with a quality noticeable higher than bilinear
method. Another interesting results is that
computation time for GPU implementation doesn’t
grow linearly with image size. This suggest that
hardware utilization is far from 100% and more
efficiency can be obtained using bigger images. This
fact is beyond the scopes of our works, because we
would like using smaller images, but means that
more computational power of the GPU is available
for improvements or different algorithm execution.
6 CONCLUSIONS AND FUTURE
WORKS
The results presented in the above paragraph point
out some interesting conclusions. First of all the
proposed method is suitable for real-time
computation and could be used for stream
processing. A second and more interesting
consideration comes out directly from paragraph 4
and is concerned to hardware utilization due to our
method which uses a small input image. If we could
use a more flexible SIMD architecture, capable of
running more than one program, probably different
algorithms could be executed at the same time: for
example image filtering and interpolation.
Unfortunately GPUs can’t provide this feature. For
this reason, we’re looking interested to other SIMD
solution, such as IBM CELL processor. A future
work taking this method to CELL BE, will be done
because this could represent an interesting solution
also for embedded devices. Although the proposed
algorithm is intended for video stream processing,
no assumptions are done for inter-frame processing.
Matching our method with different lossless
compression algorithms, also accounting inter-frame
analysis could take to different advances and
produce a system for compression at rates higher
than 4-8X. This work is essentially a preliminary
results, and our attention was focused on
magnification method. Further optimization are
thought to be introduced in future works, together
with extensive evaluation on large streams.
ACKNOWLEDGEMENTS
This work has been partially supported by FIRB
Project RBIN043TKY.
REFERENCES
Yan J.K., Sakrison DJ, 1977. Encoding of images based
on a two component source model, IEEE Trans. on
Communications. vol. COM-25, no.11, pp.1315-1322.
Gonzales R.C., P. Wintz, 1977. Digital Image Processing,
MA Addison-Wesley
Cheug-Ming, Lai et al. 2004. An efficient fractal-based
algorithm for image magnification. Proceedings of
2004 International Symposium on Intelligent
Multimedia, Video and Speech Processing, 2004.
Sang Soo, Kim, Il Kyu, Eom, and Yoo Shin Kim, 2007.
Image Interpolation Based on Statistical Relationship
Between Wavelet Subbands. IEEE International
Conference on Multimedia and Expo. pp. 1723 - 1726.
Keys, R.G. 1981. Cubic convolution interpolation for
digital image processing. IEEE Trans. ASSP.
Allebach, J. and Wong, P. W. 1996. Edge-Directed
Interpolation. Lausanne CH : IEEE Press, Proceedings
of the ICIP-96. Vol. III.
Schults, R. R. and Stevenson, R. L. 1992. Improved
definition of image expansion. San Francisco.
Proceedings of the 1992 International Conference.
Biancardi A., Lombardi L., Cinque L. 2001. Improvements
to image magnification. Elseviere Science.
Cannataro, M., Talia, D. Srimani, Pradip 2002. Parallel
data intensive computing in scientific and commercial
applications. Amsterdam, The Netherlands, The
Netherlands: Elsevier Science Publishers B. V., May
Parallel data-intensive algorithms and applications,
Vol. 28. ISSN: 0167-8191.
Luebke, David, et al. 2004. GPGPU: general purpose
computation on graphics hardware. ACM
SIGGRAPH 2004 Course Notes, International
Conference on Computer Graphics and Interactive
Techniques.
Podlozhnyuk, Victor. Image Convolution with CUDA.
http://developer.download.nvidia.com. [Online] June
2007. [Cited: April 24, 2008.]
http://developer.download.nvidia.com/.../1_1/Website/
projects/convolutionSeparable/doc/convolutionSepara
ble.pdf.
nVidia Corporation. CUDA Programming Guide. nVidia
CUDA Web Site. [Online] February 2008.
Akenine-Moller, T., & Haines, E. (2002). RealTime
Rendering. A. K. Peters.
PARALLEL LOSSY COMPRESSION FOR HD IMAGES - A New Fast Image Magnification Algorithm for Lossy HD
Video Decompression Over Commodity GPU
21
