
RETARGETING MOTION OF CLOTHING
TO NEW CHARACTERS
Yu Lee and Moon-Ryul Jung*
Department of Media Technology, Graduate School of Media, Sogang University, Seoul, Korea
Keywords: Retargeting, Cloth, Deformation, Body-oriented Cloth, Collision Detection.
Abstract: We show how to transfer the motion of cloth from a source to a target body. The obvious method is to add
the displacements of the source cloth, calculated from their position in the initial frame, to the target cloth;
but this can result in penetration of the target body, because the shape of the target body. To overcome this
problem, we compute an approximate source cloth motion, which maintains the initial spatial relationship
between the cloth and the source body; then we obtain a detailed set of correction vectors for each frame,
which relate the exact cloth to this approximation. We then compute the approximate target cloth motion in
the same way as the source cloth motion; and finally we apply the detail vectors that we generated for the
source cloth to the approximate target cloth, thus avoiding penetration of the target body. We demonstrate
the retargeting of cloth using figures engaged in dance movements.
1 INTRODUCTION
Clothing simulation is an area in which physically
based techniques pay off, and quite a lot of work
along these lines has been reported (Terzopoulos and
Fleicher, 1988, Breen et al, 1994, Carignan et al,
1992, Vollino and Thalmann, 1995, Baraff and
Witkin, 1998 , Zhang and Yuen, 2000). Tools
derived from physically based techniques are
available in commercial modeling animation
packages, such as Maya and Syflex. These tools are
a great help to animators, but physically realistic
cloth simualtion remains difficult and time
consuming, even using commercial packages. So, it
would be useful to be able to capture cloth motion in
the same way as we capture human body motion
(Pritchard and Heidrich, 2003, White et al, 2007). At
the moment, there are a few systems for capturing
cloth motion, but there will appear some in the
future.
Assuming that capturing cloth motion is feasible
in the near future, we want to devise a method of
reusing, or more precisely retargeting, a cloth
motion from one body to another.
Although a cloth motion obtained this way will
be less physically realistic than the original, in most
cases all that is required is plausible cloth behavior,
* corresponding author ( moon@sogang.ac.kr)
not strict physical accuracy.
Motion retargeting techniques have been
developed for the body (Gleicher, 1998, Lee and
Shin, 1999, Choi and Ko, 2000) and the face (Noh
and Neumann, 2001, Pyun and Shin, 2003, Na and
Jung, 2004), but there is no published work on
retargeting cloth motions to new characters.
The basic method of retargeting the motion of
one character to another is to transform the source
motion so that the resulting motion satisfies
constraints imposed by the new character, while
preserving the characteristics of the source motion as
far as possible. To retarget a cloth motion we need to
consider the source body motion, the source cloth
motion, the target body motion, and the target cloth
configuration at the initial frame, as shown in Figure
1. This is a more constrained problem than that of
retargeting facial motions, where only the source
facial motion and the configuration of the target face
at the initial frame are used in a typical
implementation.
The simplest way to obtain a target cloth motion
is to compute the displacement of the source cloth at
each frame from the initial frame, and add that
displacement to the position of the target cloth at the
initial frame. But when we see the resulting target
cloth motion together with the target body motion,
we find that the cloth penetrate the body. That is
280
Lee Y. and Jung M. (2009).
RETARGETING MOTION OF CLOTHING TO NEW CHARACTERS .
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications, pages 280-285
Copyright
c
SciTePress
because the target cloth motion was created without
considering the target body motion at all.
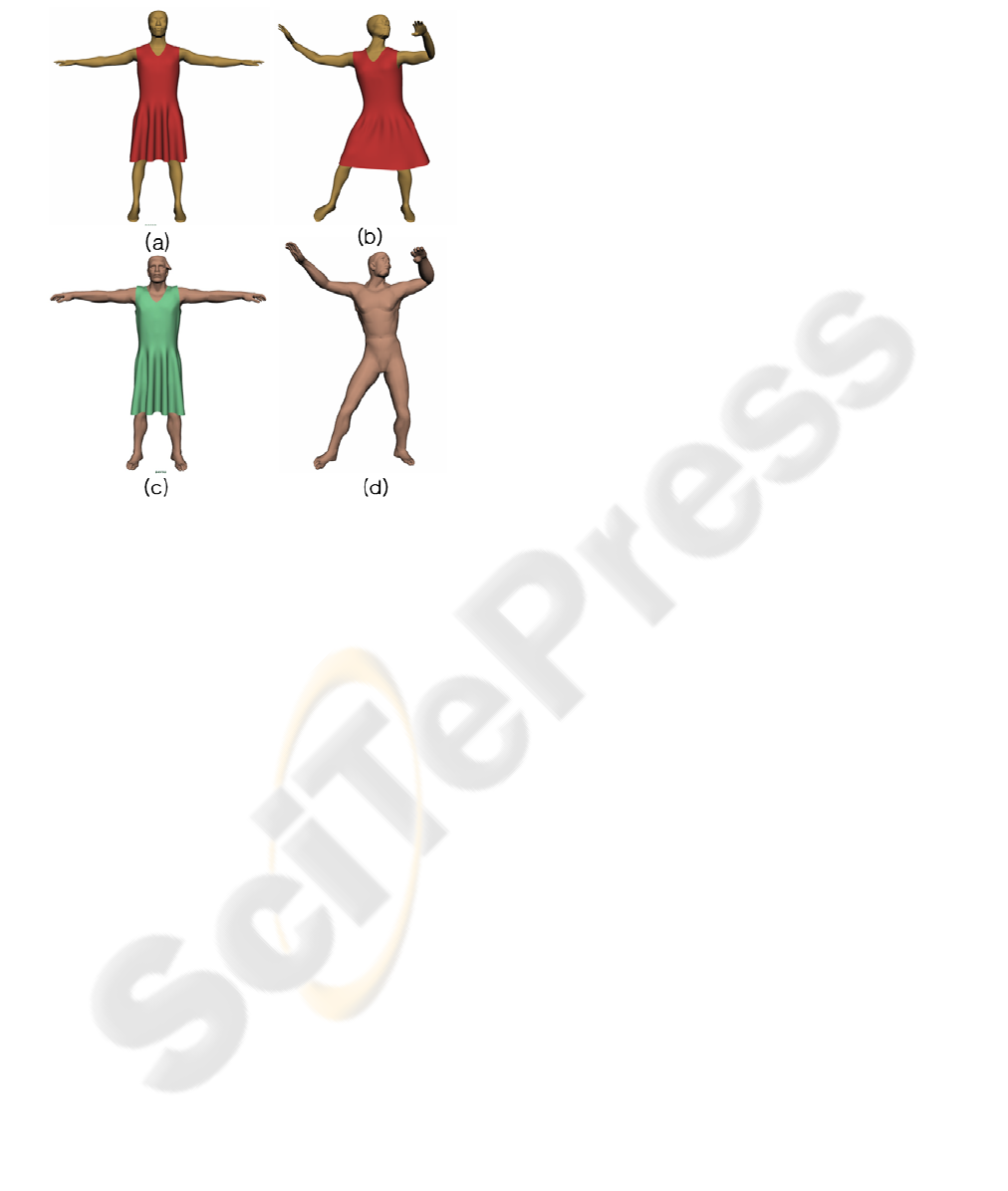
Figure 1: The input to and output of cloth motion
retargeting: (a) the source cloth at the initial frame; (b) the
source cloth at the k-th frame; (c) the target cloth at the
initial frame; (d) the target body at the k-th frame for
which the cloth have to be computed. The initial
configurations (a) and (c) are supposed to correspond to
each other.
To overcome this problem, we retarget the
source cloth motion to the target body in two phases.
First, we extract an approximate source cloth motion
from the original motion, so as to capture the overall
behavior of the source cloth without colliding with
the source body. Then we compute the detailed
motion of the source cloth by subtracting the
approximate source motion from the original source
cloth motion. In the same way, we find an
approximate target motion that captures the overall
behavior of the cloth while avoiding collision with
the target body. Adding the detailed motion to the
approximate target cloth motion produces the target
cloth motion. The new cloth may still penetrate the
target body slightly, so collisions should be detected
and resolved. We only need to deal with the
collision in a single frame; Collisions do not
propagate as they would in a true simulation as
described by Baraff et al, 1998.
In our experiments, the motion of the target body
is obtained from the motion of the source body using
the commercial Maya software. This could be done
using any method of body motion retargeting
(Gleicher, 1998, Lee and Shin, 1999, Choi and Ko,
2000). The cloth motion is obtained by using Syflex,
a plug-in in Maya. We assume that the source and
target cloth meshes have the same number of
vertices and the same connectivity.
2 THE PROPOSED METHOD
2.1 Body-oriented Cloth
To compute the approximate motion of cloth, we
adopt the surface-oriented deformation technique
(Singh et al, 2000), in which an object is deformed
so that it follows the motion of a deformer object.
The motion of the deformable object is computed in
such a way that (the surface of) the deformable
object maintains its initial spatial relationship with
(the surface of) the deformer object as that object
moves. The deformer and deformable meshes do not
need to have the same connectivity. Although the
deformer object should be a single contiguous mesh,
the deformable object may consist of several
patches. When the technique is applied to movement
of cloth, the body is the deformer, and the cloth is
the deformable object. In this paper, we will use
terms “body-oriented cloth” and “deformed cloth”
interchangeably.
The surface-oriented deformation involves two
steps: registration and deformation. During the
registration step, the extent to which each “control
element” (triangular face) k of the deformer object
influences each vertex P of the deformable object, is
computed. The weight in which control element k
influences vertex P,
P
k
w , is inversely proportional
to the distance from P to the plane of the face k. The
influence weight
P
k
w , k = 1; n, where n is the
number of control elements in the deformer object,
are normalized. In practice,
P
k
w , k = 1; n are set to
zero except for a few control elements which are
selected by the user.
At the registration step, the local coordinates,
, of each vertex P of the deformable object are
also computed, with respect to the reference system
defined on each control element k of the deformer
object. These local coordinates represent the
initial spatial relationship between the deformer and
deformable objects.
O
k
P
O
k
P
RETARGETING MOTION OF CLOTHING TO NEW CHARACTERS
281

As the deformer object moves, the deformation
step computes the world space coordinates, , of
each vertex P of the deformable object with respect
to control element k of the deformer object, so that
has the same local coordinates as in the
coordinate system of control element k of the
changed deformer object. Now, the new position
of vertex P is computed by averaging over all
control elements, as follows:
def
k
P
O
k
P
def
k
P
def
P
1
n
def p def
kk
k
PwP
=
=
∑
(1)
Note again that
P
k
w
, k = 1; n, are zero except for
a few control elements. Although simple in principle,
this surface-oriented deformation algorithm
produces good results in many situations. The
algorithm is also implemented in Maya and called
the “wrap deformer”.
2.2 The Retargeting Procedure
Using the surface-oriented deformation, cloth
motion retargeting can now be achieved by the
following procedure:
1. Set up the initial configurations of the source
cloth and the target cloth so that they correspond to
each other. The initial configurations should not
contain deep wrinkles, because they are supposed to
be representative configurations of the approximate
motions of the source and target cloth.
2. Perform an appropriate registration with
respect to the source body (the deformer object) and
the source cloth (the deformable object), using their
initial configurations.
3. Determine the body-oriented source cloth at
each frame, as shown in Figure 2, by performing
surface-oriented deformation. At the initial frame,
the deformed cloth has the same configuration as the
original cloth.
4. Find the body-oriented target cloth at each
frame, by using the same registration technique as
Step 3 (See Figure 3). This causes the body-oriented
target cloth to have the same relationship with the
target body as the body-oriented source cloth have
with the source body. It means that the body-
oriented target and source cloth are making the same
approximate motion. But the approximate target
motion does not collide with the target body because
the rough source motion does not collide with the
source body.
5. Compute the detail vectors that position the
source cloth relative to the body-oriented source
cloth, by subtracting the body-oriented cloth (as
shown in Figure 2) from the original source cloth at
each frame. This process is illustrated in Figure 4.
We assume that the original cloth mesh and the
body-oriented cloth mesh have the same
connectivity, and so the detail vectors are simply the
differences between the corresponding vertices on
both meshes.
6. Add the detail vectors of the source cloth to
the body-oriented target cloth, to produce the target
cloth at each frame. This process is illustrated in
Figure 6.
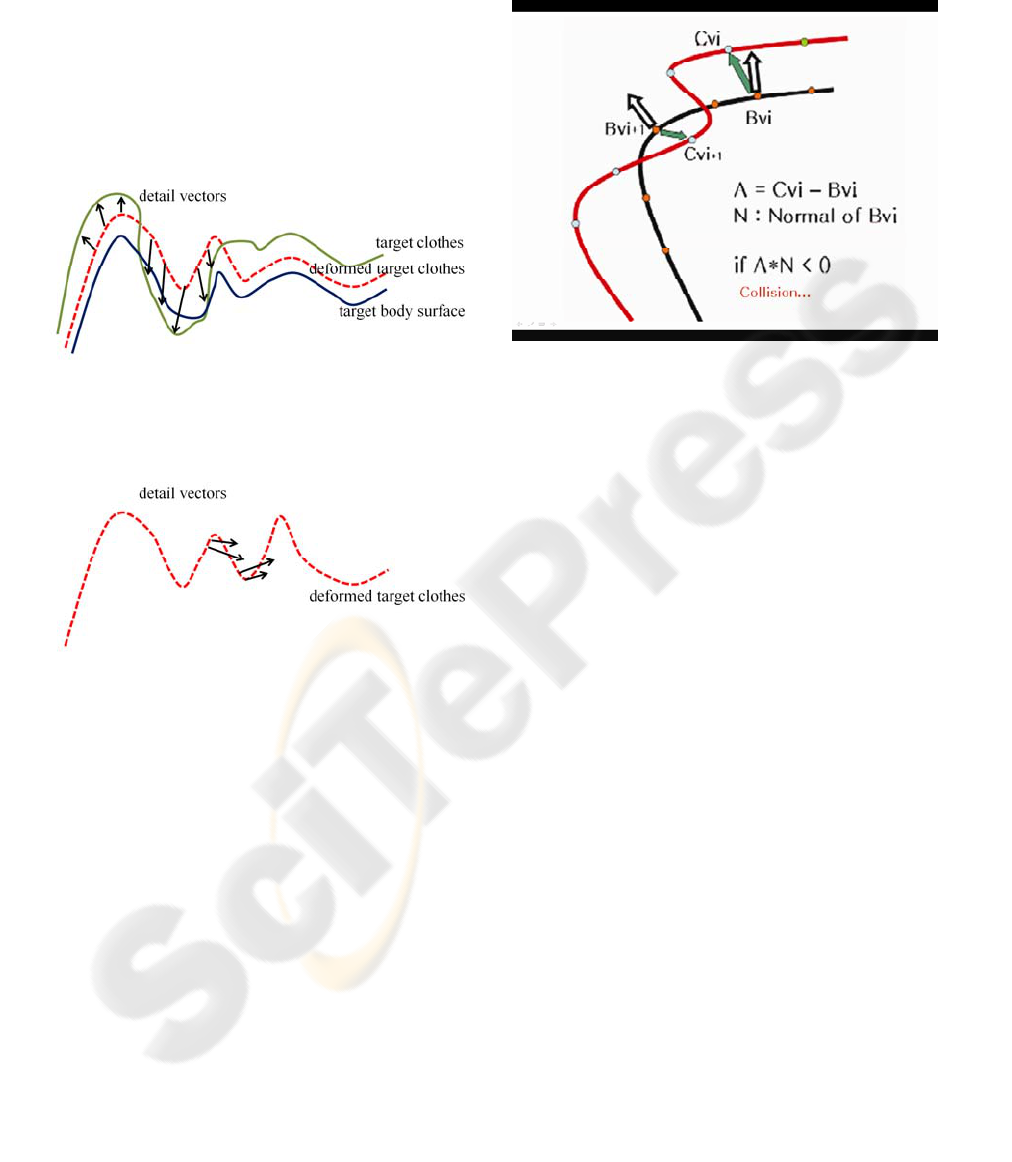
Figure 2: The body-oriented source cloth.
Figure 3: The body-oriented target cloth.
Figure 4: The detail vectors of the source cloth relative to
the body-oriented (deformed) source cloth.
3 RESOLVING COLLISIONS
The body-oriented target cloth does not penetrate
themselves or the target body, because of the way
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
282
they are generated. But when we add the detail
vectors of the source cloth to the body-oriented
target cloth, the resulting target cloth may penetrate
themselves or the target body, as shown in Figures 5
and 6.
The problem of collision detection and avoidance
in cloth simulation has been a hot issue (Baraff et al,
2003). But we are able to address the problem using
a relatively simple technique. We justify it by
observing that errors affect just one frame, and do
not propagate forward as they would in a simulation.
Figure 5: Adding the detail vectors of the source cloth to
the body-oriented target cloth(deformed target cloth), to
produce the target cloth motion. The target cloth may
penetrate the target body.
Figure 6: Some detail vectors intersect some part of the
deformed target cloth. Adding the detail vectors to the
deformed target cloth would cause the resulting target
cloth to intersect themselves unless the affected part would
not move away by its own detail vectors.
3.1 Self-collision
Self-intersection of the target cloth may be caused
when the detail vectors penetrate the approximate
target cloth, as shown in Figure 5. We have observed
no self-collision, and we assume that they are
unlikely, provided that the initial configuration of
the target cloth does not have deep wrinkles, a
property which is inherited by the deformed cloth,
because they have the same spatial relationship with
the body. Although we set up the initial
configurations of the source and target cloth so as
not to have deep wrinkles, we do not know what
depth of wrinkles would cause self-collision in the
resulting target cloth. When situations as Figure 5
occur, we avoid them by reducing the lengths of the
detail vectors. Self-penetrations are unavoidable at
the bend of a knee or an elbow. But any self-
penetration would tend to be invisible in such areas.
Figure 7: Collision detection and its resolution. The black
line represents the body and the red line the target cloth.
The green arrow, which connects a cloth vertex to the
nearest body vertex, represents a penetration vector. The
white arrow represents a vector normal to the cloth surface.
If the dot product of normal vector and the penetration
vector is negative, collision has occurred.
3.2 Cloth-to-body Collision
Figure 7 shows a situation where the target cloth
penetrates the target body. This situation can be
reversed by moving the penetrating cloth vertices in
the direction of the normal vectors at these vertices
by the extent of the penetrations (See Figure 7).
Even if collisions are avoided for each cloth vertex,
it does not resolve all collisions. The supplementary
video shows that there is residual penetration. We
are implementing collision avoidance techniques
proposed by Zhang et al(2000) and Volino et
al(2000) to see if they help remove residual
penetration.
4 RESULT
The results of our experiments on retargeting cloth
are shown in Figures 8, 9, and 10. The
accompanying video demonstrates that these results
are visually satisfactory. Though the retargeted
motion will be less natural than the original motion,
this disadvantage will often be outweighed by an
ability to create cloth motion cheaply for characters
in crowd scenes, avatars on the internet, and game
characters.
RETARGETING MOTION OF CLOTHING TO NEW CHARACTERS
283

Figure 8: A cha-cha: (left) the source motion(a woman)
and (right) the target motion(a baby).
5 CONCLUSIONS
We have presented a simple but effective method of
retargeting cloth motion from one character to
another that meets two objectives: the resulting cloth
motion does not penetrate the target body but
follows the movement of the target body smoothly;
the details of the source cloth motion is reflected in
the target cloth motion. The first objective has been
achieved by creating “body-oriented” source cloth
which moves over the source body, and “body-
oriented” target cloth which move in the same way.
The body-oriented cloth motion is approximate, and
the details of the source cloth motion can be
captured by subtracting the body-oriented motion
from the original source cloth motion. The target
cloth motion is then obtained by adding these details
to the body-oriented target cloth motion. Potential
collisions between the computed target cloth motion
and the target body are resolved by simple and cheap
methods.
Cloth motion retargeting problem is similar to
facial motion retargeting, in that both cloth and faces
are represented by meshes. But there is a crucial
difference. Facial motion retargeting involves only a
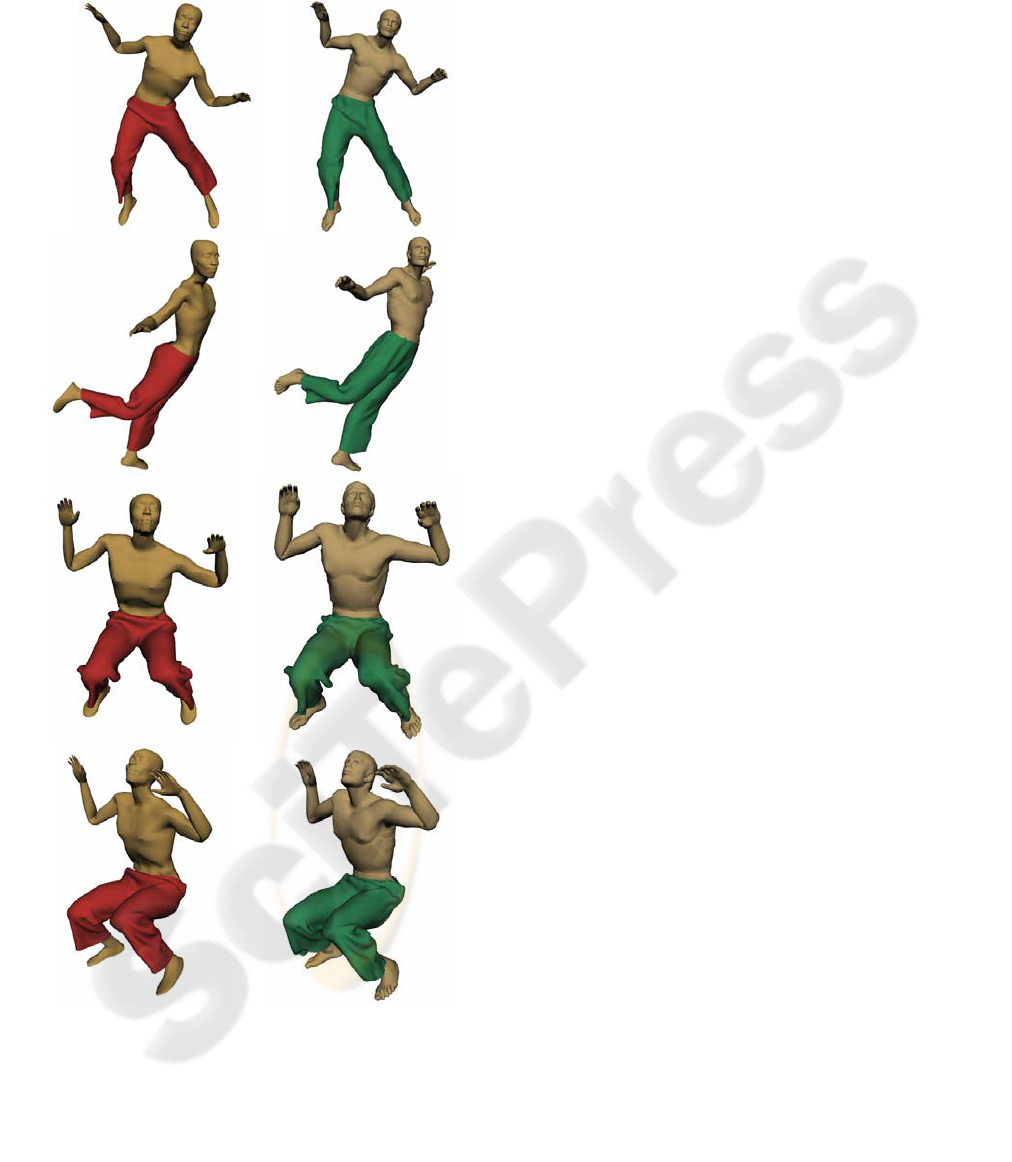
Figure 9: A jive (faster even than the cha-cha): (left) the
source motion (a man) and (right) the target motion (a
woman). Though this dance is so fast, the wrinkles of the
source cloth transfer well to the target cloth.
single surface, i.e. the skin of the face. But cloth
motion retargeting involves two surfaces, the surface
of the cloth and the surface of the underlying body.
Our contribution is to handle both surfaces
satisfactorily.
Our method relies on the assumption that the
body-oriented deformation of the initial
configuration of the cloth produces a good
approximate motion of the cloth, relative to which
the details of the cloth motion can be measured. This
assumption is reasonable and our experimental
results confirm it, but there will probably be better
ways to compute the approximate version of a given
cloth motion without collision. Finding those better
ways is interesting future work.
Cloth-body collision detection and avoidance in
the target cloth motion have not been fully dealt with.
We need to devise better ways to relocate the cloth
that have penetrated the body, so that the resulting
configuration is sufficiently smooth as well as
collision-free. Another goal is to retarget cloth
motion when the source cloth and the target cloth do
not have the same connectivity. We can still
represent the body-oriented source and target cloth
by creating a new mesh for each, with the same
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
284
ACKNOWLEDGEMENTS
connectivity; but then representation of the detail
vectors from the body-oriented surface to the
original surface is still a problem.
This is supported by research funds from Korea
Science and Engineering Foundation(2008) and
from Sogang University, Korea(2008)
REFERENCES
Baraff, D. and Witkin, A., 1998. Large steps in cloth
simulation. In SIGGRAPH’98. ACM Press.
Baraff, D., Witkin, A., and Kass, M., 2003. Untangling
cloth. In SIGGRAPH’03, ACM Press.
Breen, D., House, D., and Wozny, M., 1994. Predicting
the drape of woven cloth using interacting particles. In
SIGGRAPH’94, ACM Press.
Carignan, M., Yang, Y., Magnenat-Thalmann, N., and
Thalmann, D., 1992. Dressing animated synthetic
actors with complex deformable cloth. In
SIGGRAPH’92, ACM Press.
Choi, K. and Ko, H., 2000. On-line motion retargeting. In
JVCA’00, The Journal of Visualization and Computer
Animation.
Choi, K. and Ko, H., 2002. Stable but responsive cloth. In
SIGGRAPH’02, ACM Press.
Gleicher, M., 1998. Retargeting motion to new characters.
In SIGGRAPH’98, ACM Press.
Lee, J. and Shin, S., 1999. A hierarchical approach to
interactive motion editing for human-like figures. In
SIGGRAPH’99, ACM Press.
Na, K. and Jung, M., 2004. Hierarchical retargeting of fine
facial motion. In Eurographics’04.
Noh, J. and Neumann, U., 2001. Expression cloning. In
SIGGRAPH’01, ACM Press.
Pyun, H. and Shin, S., 2003. An example-based approach
for facial expression cloning. In Eurographics’03.
Singh, S. and Kokkevis, E., 2000. Skinning characters
using surface-oriented free-form deformation. In
Graphics Interface’00.
Terzopoulos, D. and Fleicher, K., 1988. Modeling
inelastic deformations: visoelasticity, plasticity,
fracuture. In SIGGRAPH’88, ACM Press.
Vollino, P., Courchesne, M. and Magnenat-Thalmann, M.,
1995. Versatile and efficient technique for simulating
cloth and other deformable objects. In SIGGRAPH’95,
ACM Press.
Vollino, P. and Magnenat-Thalmann, M., 2000.
Implementing fast cloth simualation with collision
response. In Computer Graphics International’00. .
Zhang, D. and Yuen, M., 2000. Collision detection for
cloth human animation. In Pacific Graphics’00.
Pritchard, D. and Heidrich, W., 2003. Cloth Motion
Capture. In Eurographics’03.
Figure 10: A very fast house dance: (left) the source
motion and (right) the target motion. The results are as
good as those of Figure 9.
White, R., Crane, K. and Forsyth, D., 2007. Capturing and
Animating Occluded Cloth. In SIGGRAPH’07, ACM
Press.
RETARGETING MOTION OF CLOTHING TO NEW CHARACTERS
285
