
COMBINING TEXTURE SYNTHESIS AND DIFFUSION FOR IMAGE
INPAINTING
Aur´elie Bugeau
Image processing group, Barcelona Media, Barcelona, Spain
Marcelo Bertalm´ıo
Dept. de Tecnologies de la Informaci´o i les Comunicacions, Universitat Pompeu Fabra, Barcelona, Spain
Keywords:
Image inpainting, Texture synthesis, Structure, Diffusion, Image decomposition.
Abstract:
Image inpainting or image completion consists in filling in the missing data of an image in a visually plausible
way. Many works on this subject have been proposed these recent years. They can mainly be decomposed
into two groups: geometric methods and texture synthesis methods. Texture synthesis methods work best with
images containing only textures while geometric approaches are limited to smooth images containing strong
edges. In this paper, we first present an extended state of the art. Then a new algorithm dedicated to both
types of images is introduced. The basic idea is to decompose the original image into a structure and a texture
image. Each of them is then filled in with some extensions of one of the best methods from the literature.
A comparison with some existing methods on different natural images shows the strength of the proposed
approach.
1 INTRODUCTION
The problem of image completion or image inpaint-
ing can be defined as follows: given an image con-
taining missing regions (corresponding for example
to some objects one wants to remove), the comple-
tion consists in filling in these missing parts in such
a way that the reconstructed image looks natural (i.e.
visually plausible). Basically, given a corrupted im-
age I : Φ → R
3
(or eventually I : Φ → R in case of
grayscale images) and a mask M : Φ → {0, 1}, the
inpainting algorithm must fill in the region Ω where
M(p) = 0 (here p is a pixel belonging to Φ).
This problem is for the moment far to be solved.
Indeed, natural images are complex and may contain
different textures, strong structures (edges), etc. Ex-
isting methods can be divided into two main groups:
”geometric” methods which allow to get regularized
contours but do not give some nice reconstruction of
textured areas and texture synthesis methods which
basically do the opposite. Before going any further,
we now briefly review these two types of approaches.
1.1 “Geometric” Methods
This first category of image completionmethods try to
fill-in the missing regions of an image through a diffu-
sion process, by propagating the information known
on the boundary towards the interior of the holes.
Generally these methods consist in finding the global
minimum of an energy function, by converging to the
steady state of the corresponding Partial Differential
Equation (PDE) (section 1.1.1). As, most of the time,
a lot of iterations are needed before the convergence
can be reached, these methods are computationally
expensive. Therefore some algorithms propagating
the information from the boundary inwards without
finding the global minimum of an energy function
have also been proposed (see section 1.1.2).
1.1.1 PDE’s based Image Inpainting
The term of ”digital inpainting” was first introduced
in (Bertalmio et al., 2000). In this paper, a third or-
der PDE, solved only inside Ω with proper bound-
ary conditions in δΩ, was proposed. Its purpose is
to propagate image Laplacians in the isophote (line
of constant intensity) directions. The edges recovered
26
Bugeau A. and Bertalmà o M.
COMBINING TEXTURE SYNTHESIS AND DIFFUSION FOR IMAGE INPAINTING.
DOI: 10.5220/0001773900260033
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-69-2
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

with this approach are smooth and continuous at the
boundary of the hole. However, it can not deal with
texture and, whenever the area to be inpainted is too
big, the result exhibits a lot of blur and is not contrast
invariant. This work was partly inspired by the Image
Disocclusion algorithm of Masnou and Morel (Mas-
nou and Morel, 1998) (see also (Masnou, 2002), in
which (an approximation of) the Elastica functional
was minimized inside the image gap. In (Ballester
et al., 2001) the Elastica functional is relaxed and then
minimized with a system of two coupled PDE’s.
Many other PDEs dedicated to inpainting have
been proposed in the literature. Inspired by
(Bertalmio et al., 2000), the authors of (Chan et al.,
2001) proposed to minimize the total variation en-
ergy which corresponds to a second-order PDE. How-
ever, this PDE does not maintain the curvature. With
this second-order PDE the contours are joined with
straight isophotes, not necessarily smoothly contin-
ued from the mask boundary. Hence, it is only in-
tended for small gaps. In (Chan and Shen, 2001),
the previous method has been extended by adding
a term diffusing the curvature in the direction nor-
mal to the isophote. It then becomes a third-order
PDE but still creates visible corners due to its straight
line connections. This is because the principle of
good continuation (the human visual system com-
pletes missing curves with curves that are as short and
as smooth as possible) is not respected. As a conse-
quence, a fourth-order PDE was proposed in (Chan
et al., 2002). It is based on the Euler’s elastica (Mum-
ford, 1994). Unfortunately, in pratice, this method is
extremely computationally consuming since conver-
gence requires a high number of iterations.
All previous PDEs where based on curvature dif-
fusion. Other PDEs, also relying on the isophotes
as was (Bertalmio et al., 2000), exist. For example,
in (Bertalm´ıo, 2006), a third-order PDE complying
with the principle of good continuation was proposed.
While this PDE is the best third order PDE for image
inpainting, it still does not well permit to handle im-
ages containing textures and its high order makes it
computationally expensive.
Another PDE method dedicated to anisotropic
smoothing was developed in (Tschumperl´e, 2006).
This method is based on the observation that all previ-
ous PDEs locally smooth (or diffuse) the image along
one or several directions that are different at each
image point, the principal smoothing direction being
parallel to the isophotes. As shown in this paper, an-
other approach is to retrieve the geometry of the main
structures inside the gap and to apply anisotropic dif-
fusion following this geometry. The geometry can be
retrieved using a structure tensor field and the direc-
tion of the smoothing comes from a second field of
diffusion tensors.
1.1.2 Inpainting based on Coherence Transport
The global resolution of all the PDEs previously
presented is made iteratively, which makes these
methods very time consuming. A non iterative
method, based on coherence transport, was proposed
in (Bornemann and M¨arz, 2007). This algorithm re-
lies on (Telea, 2004), in which Telea introduced a fast
algorithm for image inpainting that calculates the im-
age values inside the masks by traversing these pixels
in just a single pass using the fast marching technique.
The mask is filled in a fixed order, from its boundary
inwards, using weighted means of already calculated
image values.
The main principle of the algorithm from (Borne-
mann and M¨arz, 2007) is to define the weights such
that the image information is transported in the direc-
tion of the isophotes. The directions of the edges are
extracted using the eigenvalues of structure tensors.
1.2 Texture Synthesis Methods
Given a texture sample, the texture synthesis prob-
lem consists in synthesizing other samples from the
texture. The usual assumption is that the sample is
large enough to capture the stationarity of the texture.
There have been many works extending texture syn-
thesis to inpainting. We here only present two of the
major works in this domain.
In the seminal paper (Efros and Leung, 1999), the
authors have presented a simple yet effective non-
parametric texture synthesis method based on local
image patches. The texture is modelled as a MRF by
assuming that the probability distribution of bright-
ness values for one pixel given the brightness values
of its spatial neighbourhood is independent from the
rest of the image. The neighbourhoodis a square win-
dow around the pixel and its size is fixed by hand. The
input of the algorithm is a set of model image patches
and the task is to select an appropriate patch to predict
the value of an unknown pixel. This is done by com-
puting a distance measure between the known neigh-
bourhood of an unknown pixel and each of the input
patches. The distance is a sum of squared differences
(SSD) metric.
The authors of (Criminisi et al., 2004) proposed an
extension of Efros and Leung’s method, with two im-
provements. The first one concerns the order in which
the pixels are synthesized. Indeed, a system for as-
signing priorities is used (assigning priorities to the
pixels was also proposed in (Harrison, 2001)). The
priority order at a pixel is the product of a confidence
COMBINING TEXTURE SYNTHESIS AND DIFFUSION FOR IMAGE INPAINTING
27

term, which measures the amount of reliable informa-
tion surrounding the pixel, and a data term, that en-
courages linear structures to be synthesized first. The
second improvement is a speed-up process. Contrary
to the original method in (Efros and Leung, 1999),
when synthesizing a pixel, not only the value of this
pixel is inpainted in the output image (using the patch
that givesthe smallest distance metric), but all the pix-
els in its neighbourhood that have to be inpainted are
filled in.
1.3 Overview of the Paper
As already mentioned, none of the previously de-
scribed methods is well adapted for all type of images.
In this paper we will therefore combine diffusion and
texture synthesis for image inpainting. Such a combi-
nation has already been proposed in (Bertalmio et al.,
2003). In the current work, we propose an exten-
sion to this paper mainly using some of the meth-
ods mentioned in this introduction. After reviewing
the method of (Bertalmio et al., 2003) in section 2, a
new algorithm will be proposed in section 3. We end
the paper with some experimental results and compar-
isons with existing approaches.
2 COMBINING TEXTURE
SYNTHESIS WITH DIFFUSION
Both texture synthesis and diffusion have their own
advantages and drawbacks for image inpainting.
While diffusion gives blurred results it allows a con-
tinuity of the contours. Texture synthesis permits to
conserve the textures but usually fails at preserving
the edges and big structures. Therefore combining
these two main types of approaches seems judicious.
As proposed in (Sun et al., 2005), a user can interact
to first specify important missing structures, where a
specific structure propagation technique is applied. A
texture synthesis approach is then used to fill in the
rest of the image. Another algorithm compining both
types of approaches without requiring any user inter-
vention is (Bertalmio et al., 2003). It is based on the
decomposition of the original image into a “structure”
and a “texture” image.
2.1 Structure/Texture Decomposition
A solution to keep the advantages of diffusion and
texture synthesis is to separate the image into a texture
image and a structure image. The problem is then to
find a structure image u containing only the big struc-
tures of the original image I and a texture image v
such that:
I = u+ v. (1)
A method directly dedicated to finding these two
images has been proposed in (Vese and Osher, 2003).
The problem consists in finding the structure image
that minimizes the energy:
F(u) =
Z
|∇u| + λ
Z
kvk
2
L
2
. (2)
The first term of eq.(2) is a smoothness term
whose role is to removethe noise, and the second term
is a data fidelity term. This equation tends to remove
the noise while preserving the important structures.
Unfortunately, in (Meyer, 2001), Meyer showed that
when using eq.(2), the texture image does not only
contain oscillations (corresponding to noise) but also
the brightness’ edges. In fact, the L
2
space is not ap-
propriate for modelling oscillatory patterns. He there-
fore suggested to use the Banach space. The authors
of (Vese and Osher, 2003) proposed an algorithm to
decompose the original image into a texture and a
structure image in that case. An example of such a de-
composition is shown in figure 1. Note how the struc-
ture image (second column) looks like a cartoon im-
age that only contains important structures while the
texture images (third columns) contains mainly small
edges and noise.
2.2 An Existing Combination Algorithm
An inpainting algorithm based on a structure/texture
image decomposition has been presented in
(Bertalmio et al., 2003). The idea is to first de-
compose the original image into a structure image
and a texture image using the method of (Vese and
Osher, 2003) previously presented. The structure
image is reconstructed by the inpainting method of
(Bertalmio et al., 2000) and the second one by the
texture synthesis of (Efros and Leung, 1999). The
resulting two images are finally added to obtain to
final reconstructed image. This method gives less
artefacts on the contours of the reconstructed objects
than simple texture synthesis but it blurs the filling
region. Furthermore it stays limited to small image
gaps.
3 COMBINING TEXTURE
SYNTHESIS WITH DIFFUSION:
A NEW ALGORITHM
In this section we present the new algorithm we pro-
pose for image inpainting. It is an extension of the
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
28
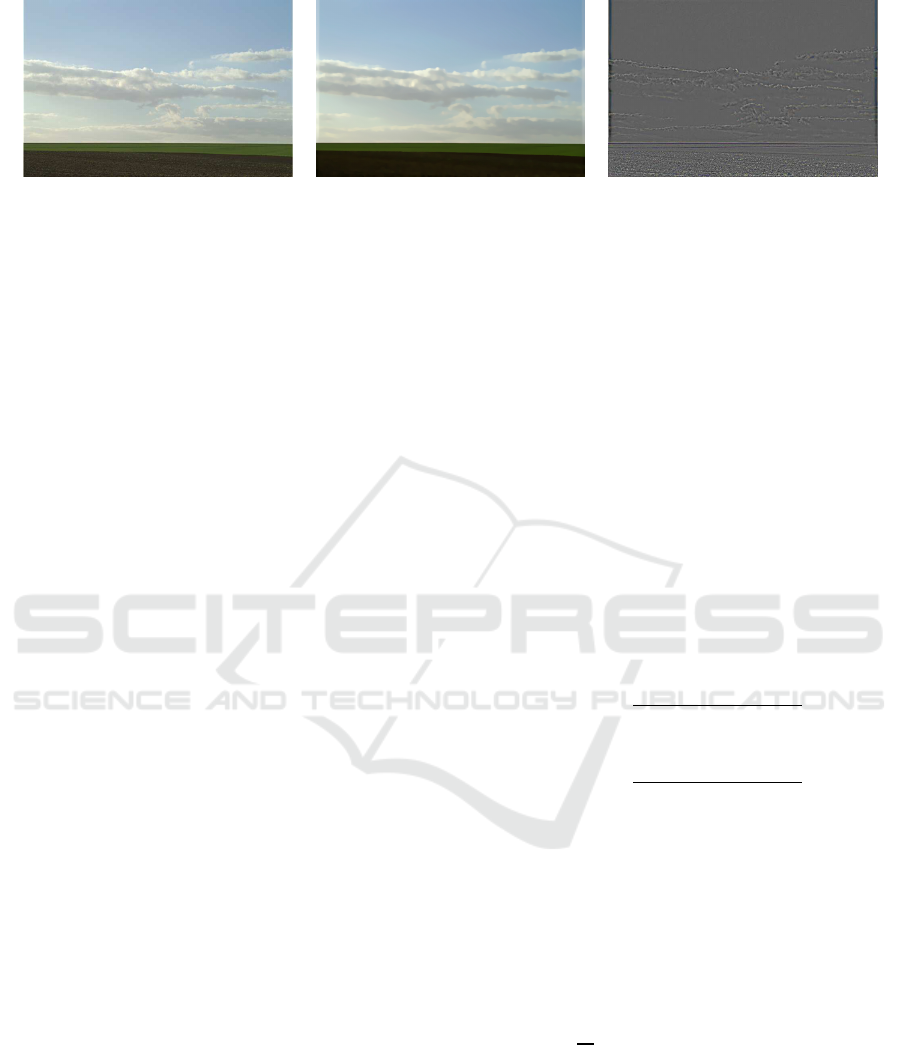
Figure 1: Result of the structure/texture decomposition algorithm from (Vese and Osher, 2003). The first column shows the
original image, the second column the structure image, and finally the last one the texture image.
algorithm from (Bertalmio et al., 2003) presented in
the previous section. It is based on some improve-
ments to most of the steps involved. Therefore before
enumerating the whole algorithm, the presentation of
these improvements will be given.
3.1 Inpainting the Structure Image
In (Bertalmio et al., 2003) the so called “image in-
painting algorithm” from (Bertalmio et al., 2000) was
used to inpaint the structure image. This method
was briefly presented in the introduction. It relies on
the resolution of a third order PDE that may cause
noticeable blur in the result image. Furthermore,
this third order PDE needs many iterations to con-
verge and is therefore computationally expensive. We
presented, in the same section, another PDE based
method (Tschumperl´e, 2006) that relies on a second
order PDE while rendering less blur. This method
gives very satisfactory results even after a small num-
ber of iterations. Therefore, the inpainting of the
structure image will here be done based on this al-
gorithm which we now describe in further details.
The main idea of geometric approaches is to dif-
fuse the colors along the isophotes which are con-
sidered to be the strong edges. The method from
(Tschumperl´e, 2006) follows the same scheme: the
direction of the main structures inside the gap is first
computed and an anisotropic diffusion following this
geometry is then applied. A particularity here is that
the geometry is retrieved using structure tensor fields
(Weickert, 1998) and the geometry of the smoothing
comes from a second field of diffusion tensors. For
a multi-valued image, the structure tensor is defined,
for each pixel p, as:
J(p) =
n
∑
d=1
∇I
d
(p)∇I
T
d
(p), (3)
where ∇I
d
denotes the gradient image for the d
th
(color) channel. This tensor is a 2x2 symmetric and
semi-positive matrix. Its eigenvalues are positive and
can be ordered as: 0 ≤ λ
−
(p) ≤ λ
+
(p). The cor-
responding eigenvectors are denoted as θ
−
(p) and
θ
+
(p). These eigenvectors represent two orthogonal
directions directed along the local maximum (gener-
ally normal) and minimum (generally tangent) vari-
ations of image intensities at pixel p. The eigenval-
ues then measure the effective variations (strength of
an edge) of the image intensities along these vectors.
The local smoothing geometry that should derive the
diffusion process is given by the field of diffusion
tensors (Weickert, 1998; Tschumperle and Deriche,
2005). This field, denoted as T, depends on the local
geometry and is defined, for each pixel p, as:
T(p) = f
−
(p)θ
−
(p)θ
−
(p)
T
+ f
+
(p)θ
+
(p)θ
+
(p)
T
. (4)
The functions f
−
and f
+
set the strengths of
the desired smoothing along the respective directions
θ
−
(p) and θ
+
(p). In (Tschumperl´e, 2006), they are
defined as:
f
−
(p) =
1
(1+ λ
−
(p) + λ
+
(p))
p
1
, (5)
and
f
+
(p) =
1
(1+ λ
−
(p) + λ
+
(p))
p
2
, (6)
where p
1
and p
2
are some input parameters such that
p1 < p2.
The PDE proposed is derived from an analysis of
two regularization PDEs. The first one is the diver-
gence based PDE (Weickert, 1998) and the second
one, the trace based PDE (Tschumperle and Deriche,
2005). Therefore, the curvature-preserving smooth-
ing PDE of (Tschumperl´e, 2006) that smoothed I
along a field of vectors w is:
∂I
∂t
= trace
ww
T
H
I
+ ∇IJ
w
w (7)
where J
w
is the Jacobian of w. Its goal is to smooth I
along w with locally oriented Gaussian kernels. The
algorithm to find the steady state of this equation is
clearly enounced in (Tschumperl´e, 2006).
COMBINING TEXTURE SYNTHESIS AND DIFFUSION FOR IMAGE INPAINTING
29

3.2 Inpainting the Image before
Decomposing
If the parameters chosen for the decomposition algo-
rithm from (Vese and Osher, 2003) are not very well
adapted to the data, only the very strong structures
may be kept in the structure image. Then when apply-
ing the algorithm from (Tschumperl´e, 2006), the ten-
sor of structure may not contain enough information
and the inpainting result could be blurred. We have
observed this phenomenon on several experiments.
Therefore, instead of inpainting only the structure im-
age with a diffusion method, we propose to do it on
the original image. The decomposition of the image
into a structure and a texture image is only performed
afterwards. The obtained structure image is then al-
ready inpainted and only a texture synthesis inpaint-
ing on the texture image still needs to be performed.
3.3 Inpainting the Texture Image
In (Bertalmio et al., 2003), the texture image is in-
painted with the algorihm from (Efros and Leung,
1999). As we saw in section 1.2, this algorithm can
be improved using the method from (Criminisi et al.,
2004). Indeed, setting an inpainting order (depending
on the edges and the confidence) to the pixels cleary
leads to better results. Furthermore, copying an entire
patch instead of only one pixel is faster. We here pro-
pose some improvements to this algorithm. Some of
these improvements require the structure image and
therefore texture synthesis will only be applied after
all the other processes.
3.3.1 Improving the Texture Synthesis
Algorithm
Priorities data term. The first improvement con-
cerns the data term in the priorities of (Criminisi et al.,
2004). The data term is defined as
D(p) =
|∇I
⊥
(p)|
α
(8)
where ∇
⊥
is the orthogonal gradient and α is a nor-
malization factor (equal to 255 for grayscale images).
It encourages the linear structures to be synthesized
first and depends on the isophotes (contours) that
eventually pass by p. If we compute this term on
the texture image, we will only take into account the
small contours and the noise contained in the texture,
but not the important edges. It is then better to com-
pute it only on the structure image.
As the structure image is already inpainted at that
stage, we can also use a better representation of the
contours, i.e. of the geometry of the image. Indeed,
we can now use the tensors of texture J(p) (equa-
tion (3)) to compute the data term. The eigenvalues
at pixel p are λ
−
(p) and λ
+
(p) and corresponding
eigenvectors are θ
−
(p) and θ
+
(p). Using these nota-
tions, the new data term is given by:
D(p) =
λ
+
(p) − λ
−
(p)
α
. (9)
Direction of the Search. Another change concerns
the directions in which the candidate patches are
searched for. It can be applied directly to the algo-
rithm from (Criminisi et al., 2004) and does not nec-
essarily require the structure image. Nevertheless, as
we have it at this stage, we will use it. The idea
is to remark that the best patch Ψ
bp
for the source
patch Ψ
p
is probably in the direction of the isophotes
(the isophote direction is given by the eigenvector
θ
−
(p)). We then propose to only look for the can-
didate patches Ψ
q
that verify the following test:
θ
−
(p) ·
p− q
kp− qk
> 0.9. (10)
In the original texture synthesis method, finding
the candidate patch Ψ
bp
(centered at pixel bp) corre-
sponds to solving
bp = argmin
q∈
¯
Ω
∑
r∈Ψ
p
M(r)(I(r) − I(q+ r− p))
2
, (11)
where d is the sum of square differences (SSD) func-
tion. The best patches correspond to the patches that
have the smallest associated distance measures. Re-
stricting the direction of the search, eq.(11) becomes:
bp = argmin
q∈
¯
Ω|θ
−
(p)·
p−q
kp−qk
>0.90
∑
r∈Ψ
p
M(r)(I(r) − I(q+ r− p))
2
.
(12)
Note that we compute the distance both on the
texture and the structure images because the texture
image can sometimes only contain non informative
noise. We then finally get the following equation:
bp = argmin
q
∑
r∈Ψ
p
M(r)
u(r) − u(r
′
)
2
+
v(r) − v(r
′
)
2
,
(13)
where r
′
= r− p+ q.
3.3.2 Texture or Structure?
The problem of texture synthesis is that it usually fails
at reconstructing regularized structures. In particular
some shocks can be visible on connected edges. On
the other hand with diffusion methods this problem
is almost always solved. Furthermore we currently
have at our disposal a texture image inpainted with
anisotropic diffusion. Indeed, the two first steps of
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
30

the complete algorithm are: inpaint the image with
(Tschumperl´e, 2006) and decompose it. Therefore
what we should do is to keep the current intensity val-
ues on the important structures and only apply texture
synthesis on the other pixels. We then need to decide
whether or not a pixel belongs to a strong structure.
The notion of strong structure depends on the force of
the gradient which can be characterized by the tensor
of structure eigenvalues. We then propose the follow-
ing test:
λ
+
(p) − λ
−
(p) < β, (14)
where β is a threshold equal to the mean:
β =
∑
q∈
¯
Ω
λ
+
(q) − λ
−
(q)
|
¯
Ω|
. (15)
Of course this threshold is basic and probably not
always the best choice and some further work should
concentrate on a better automatic estimation.
3.4 Algorithm
We can now sum up the whole algorithm:
1. Inpaint the image with the anisotropic smoothing
method from (Tschumperl´e, 2006).
2. Decompose the image into a structure and a tex-
ture image using the texture-structure image de-
composition from (Vese and Osher, 2003)
3. Compute the tensors, the eigenvalues and the
eigenvectors on the structure image resulting from
step 2.
4. For all the pixels p of the mask, compute the pri-
orities P(p) = C(p) ∗ D(p) (for the others, p ∈
¯
Ω,
P(p) = 0). The pixels with higher values of P will
be inpainted first.
5. Inpaint the texture image:
(a) Find the pixel p ∈ Ω having the highest priority
value and that has not been inpainted yet.
(b) Texture or structure?
• if λ
+
(p) −λ
−
(p) < β, then apply texture syn-
thesis to the pixel p using equation (13) (in
practice one patch is arbitrarily chosen be-
tween the best ones as in (Efros and Leung,
1999)).
Copy image data from Ψ
bp
to Ψ
p
for all the
pixels of Ψ
p
∩ Ω.
• else do not change the pixel value.
(c) Set Ω = Ω\p.
(d) Return to (a).
6. Combine (sum) the inpainted texture image with
the structure image resulting from step 2.
3.5 Results
In this section, some results of this new algorithm are
presented. They are compared with three of the meth-
ods already mentioned in the introduction: the dif-
fusion methods of (Tschumperl´e, 2006) and (Borne-
mann and M¨arz, 2007), and the texture synthesis al-
gorithm from (Criminisi et al., 2004). All of these
methods require the tuning of some parameters. This
is also true for our algorithm since its relies on two of
these existing approaches. As suggested in the orig-
inal papers, we set the contour preservation parame-
ter p
1
equal 0.001, the structure anisotropy p
2
= 100,
the time step dt = 150 and the number of iterations
nb equal to 100 for the method from (Tschumperl´e,
2006) and for our algorithm. For the one from (Borne-
mann and M¨arz, 2007), we set the averaging radius
ε = 5, the sharpness parameter κ = 25, the scale
parameter for pre-smoothing σ = 1.4 and for post-
smoothing ρ = 4. The last parameter that has to be
set is the patch size required both by our method and
by the one from (Criminisi et al., 2004). For all the
results presented hereafter, we used patches of size
9x9. We could probably have obtained better results
on some of the images by tuning the parameters for
each experiments. Nevertheless, we have preferred to
show the performance of the method regardless of all
these parameters values.
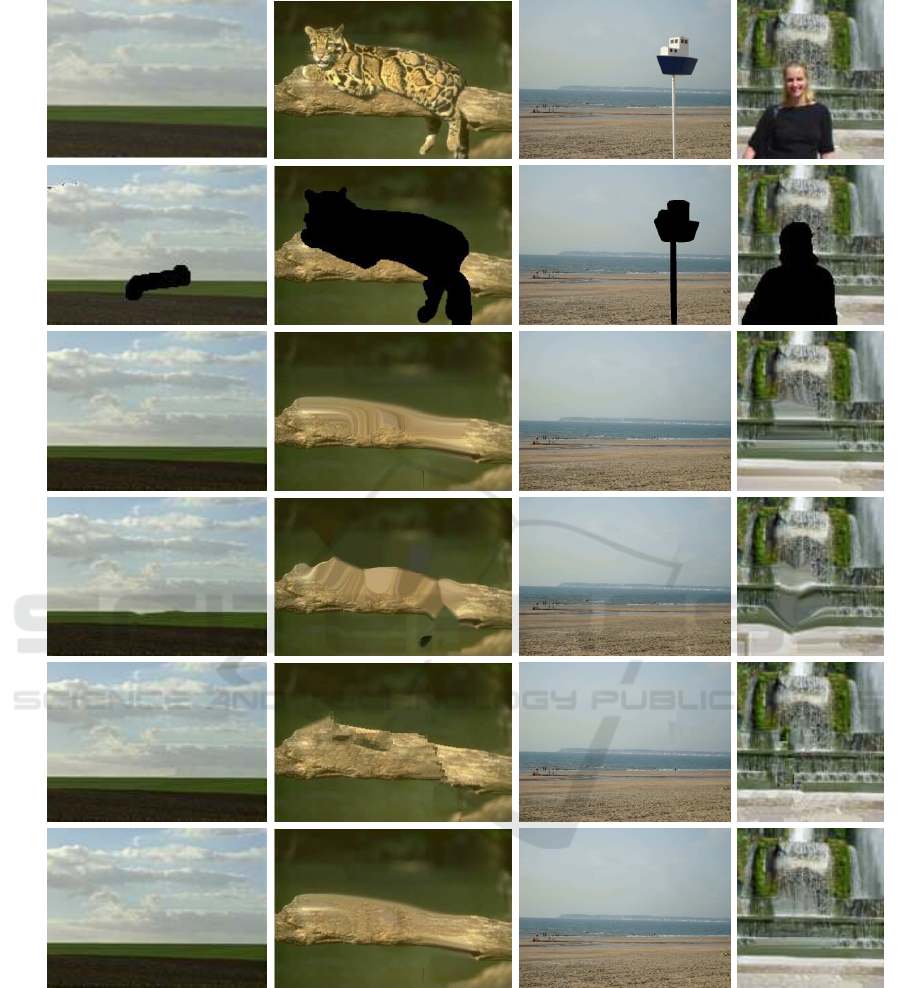
We now present some results on four different
images (figure 2). For each figure, the first row
represents the original corrupted image, the sec-
ond one shows in black the mask to be inpainted.
Then we are presenting respectively the results from
(Tschumperl´e, 2006), the ones from (Bornemann and
M¨arz, 2007) and (Criminisi et al., 2004) and finally
the results of our algorithm.
By looking
1
at the results of the diffusion meth-
ods (row (c) and (d)), we observe the properties that
were already mentioned: these methods permit to ob-
tain regularized contours but are not able to recon-
struct the textures. Therefore the resulted images are
blurred. Remark that the method from (Tschumperl´e,
2006) gives better results than the one from (Borne-
mann and M¨arz, 2007) as it takes into account the
global geometry of the image and not only the most
important isophotes. When looking at the fifth row,
we observe the opposite, textures are pretty well re-
constructed but the edges are not continuous. This
is particularly visible on the second of the fourth im-
ages, for which the gap is bigger.
For all the images, the results obtained with our
algorithm are very satisfactory. Indeed, our method
1
The properties of the results can be more easily noticed
by zooming on the images.
COMBINING TEXTURE SYNTHESIS AND DIFFUSION FOR IMAGE INPAINTING
31
(a)
(b)
(c)
(d)
(e)
(f)
Figure 2: Results of the proposed algorithm on four images. (a) Original image. (b) In black the mask to be inpainted. (c)
Results from (Tschumperl´e, 2006). (d) Results from (Bornemann and M¨arz, 2007). (e) Results from (Criminisi et al., 2004).
(f) Results from our algorithm.
combines the advantages of the two other types of ap-
proaches. Contrary to all the other techniques, there
is not any discontinuity on the boundary of the mask.
Furthermore, the textures are well propagated. Never-
theless, all these results are not perfect: the last image
still contains a bit of blur. Another drawback can be
highlighted from this result. Indeed, one can remark
that the result of the first step of the algorithm, that is
the result of the diffusion method from (Tschumperl´e,
2006) influences the final result. Therefore, if the re-
sult of this method is not satisfactory, the reconstruc-
tion given by our algorithm may contain more visual
artefacts.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
32

4 CONCLUSIONS
In this document, a state of the art of diffusion and
texture synthesis methods has first been presented.
Some chosen algorithms have been described in more
detail and their results analysed. From this analy-
sis, it appeared judicious to combine a texture syn-
thesis method with a diffusion algorithm. Therefore,
we have proposed an algorithm that combines these
two types of approaches. It decomposes the origi-
nal image into the sum of a texture and a structure
image and inpaints each image independently. The
inpainted of the structure image is directly obtained
with the algorithm from (Tschumperl´e, 2006) while
for the completion of the texture image we have pro-
posed some extensions of the algorithm from (Crim-
inisi et al., 2004).
Some promising results have been shown. How-
ever, the quality of the results may still be improved,
as they depend on the diffusion method. Another
drawback is the influence of the parameters. The re-
sults presented were all obtained with the same pa-
rameters. Nevertheless, tuning them automatically
taking into account the type of data, would probably
improve the quality of our method. This will be the
topic of our future research.
ACKNOWLEDGEMENTS
This work was supported by the Torres Quevedo Pro-
gram of the Ministerio de Educaci´on y Ciencia of
Spain and partially founded by Mediapro through the
Spanish project CENIT-2007-1012 i3media.
REFERENCES
Ballester, C., Bertalm´ıo, M., Caselles, V., Sapiro, G., and
Verdera, J. (2001). Filling-in by joint interpolation
of vector fields and gray levels. IEEE Trans. on Im.
Processing, 10(8):1200–1211.
Bertalm´ıo, M. (2006). Strong-continuation, contrast-
invariant inpainting with a third-order optimal pde.
IEEE Trans. on Im. Processing, 15(7):1934–1938.
Bertalmio, M., Sapiro, G., Caselles, V., and Ballester, C.
(2000). Image inpainting. In SIGGRAPH: ACM Spe-
cial Interest Group on Comp. Graphics and Interac-
tive Techniques.
Bertalmio, M., Vese, L., Sapiro, G., and Osher, S. (2003).
Simultaneous structure and texture image inpainting.
IEEE Trans. on Im. Processing, 12(8):882–889.
Bornemann, F. and M¨arz, T. (2007). Fast image inpainting
based on coherence transport. Journal of Mathemati-
cal Imaging and Vis., 28(3):259–278.
Chan, T., Kang, S., and Shen, J. (2002). Euler’s elastica and
curvature based inpaintings. Journal of Appl. Math.,
63:564–592.
Chan, T., Osher, S., and Shen, J. (2001). The digital tv filter
and nonlinear denoising. IEEE Trans. on Im. Process-
ing, 10(2):231–241.
Chan, T. and Shen, J. (2001). Nontexture inpainting by
curvature-driven diffusions. Journal of Visual Com-
munication and Im. Representation, 12(4):436–449.
Criminisi, A., P´erez, P., and Toyama, K. (2004). Region fill-
ing and object removal by exemplar-based inpainting.
IEEE Trans. on Im. Processing, 13(9):1200–1212.
Efros, A. and Leung, T. (1999). Texture synthesis by non-
parametric sampling. In In Proc. of the Int. Conf. on
Comp. Vis.
Harrison, P. (2001). A non-hierarchical procedure for re-
synthesis of complex textures. In WSCG Conf. Proc.
Masnou, S. (2002). Disocclusion: a variational approach
using level lines. IEEE Trans. on Im. Processing,
11(2):68–76.
Masnou, S. and Morel, J. (1998). Level-lines based dis-
occlusion. In Proceedings of 5th IEEE Intl Conf. on
Image Process., Chicago, volume 3, pages 259–263.
Meyer, Y. (2001). Oscillating patterns in image processing
and nonlinear evolution equations. American Mathe-
matical Society, Providence, RI.
Mumford, D. (1994). Algebraic Geometry and its Appli-
cations, chapter Elastica and Computer Vision, pages
491–506. Chandrajit Bajaj, New York, Springer-
Verlag.
Sun, J., Yuan, L., Jia, J., and Shum, H. (2005). Image com-
pletion with structure propagation. In SIGGRAPH:
ACM Special Interest Group on Comp. Graphics and
Interactive Techniques.
Telea, A. (2004). An image inpainting technique based on
the fast marching method. Journal of graphics tools,
9(1):23–34.
Tschumperl´e, D. (2006). Fast anisotropic smoothing
of multi-valued images using curvature-preserving
pde’s. Int. Journal of Comp. Vis., 68(1):65–82.
Tschumperle, D. and Deriche, R. (2005). Vector-valued im-
age regularization with pdes: a common framework
for different applications. IEEE Trans. on Pat. Analy-
sis and Machine Intelligence, 27(4):506–517.
Vese, L. and Osher, S. (2003). Modeling textures with total
variation minimization and oscillating patterns in im-
age processing. Journal scientific Computing, 19(1-
3):553–572.
Weickert, J. (1998). Anisotropic diffusion in image process-
ing. Teubner Verlag, Stuttgart.
COMBINING TEXTURE SYNTHESIS AND DIFFUSION FOR IMAGE INPAINTING
33
