
LIVER SEGMENTATION USING LEVEL SETS
AND GENETIC ALGORITHMS
Dário A. B. Oliveira, Raul Q. Feitosa
Department of Electric Engineering, Catholic University of Rio de Janeiro, Rio de Janeiro, Brasil
Mauro M. Correia
Unigranrio and National Cancer Institute-INCA, Rio de Janeiro, Brasil
Keywords: Medical Imaging, Liver Segmentation, Computer Tomography, Level Sets, Genetic Algorithms.
Abstract: This paper presents a method based on level sets to segment the liver using Computer Tomography (CT)
images. Initially, the liver boundary is manually set in one slice as an initial solution, and then the method
automatically segments the liver in all other slices, sequentially. In each step of iteration it fits a Gaussian
curve to the liver histogram to model the speed image in which the level sets propagates. The parameters of
our method were estimated using Genetic Algorithms (GA) and a database of reference segmentations. The
method was tested using 20 different exams and five different measures of performance, and the results
obtained confirm the potential of the method. The cases in which the method presented a poor performance
are also discussed in order to instigate further research.
1 INTRODUCTION
In medical imaging analysis, image-guided surgery
and organs visualization, segmentation is a crucial
step. This step is particularly arduous in abdominal
CT images because different organs lie within
overlaping intensity value ranges and are often near
to each other anatomically.
Numerous techniques have been proposed in the
literature for extraction of organs contours in
abdominal CT scans. They can be roughly divided in
two main groups: model driven and data driven
approaches.
Model driven techniques (e.g. Lamecker et al.,
2004) use pre-defined models to segment the desired
object from the available images. This kind of
technique basically searches the images for instances
that fit a given model described in terms of object
characteristics such as position, texture and spatial
relation to other objects.
Data driven techniques (e.g. Fujimoto et al.,
2001) try to emulate the human capacity to identify
objects using some similarity information present on
image data, automatically detecting and classifying
objects and features in images. Many of them use
known techniques such as region growing and
thresholding, combined with some prior knowledge
about the object being analised.
This paper proposes a model driven method
based on level sets to segment the liver with an
evolutionary approach to select its paremeters. Using
an initial user-defined liver segment in one slice, the
method segments the liver through all other slices. It
uses a Gaussian fit to define the speed image where
the level sets propagates. The initial solution at each
slice is defined as the region previously segmented
on an adjacent slice. Experiments using five exams
as training set and other 15 exams for validation
indicate the outcome of our method.
The subsequent text is organised in the following
way. Section 2 presents theorectical fundamentals of
level sets and genetic algorithms. Section 3 presents
the proposed segmentation method in details, section
4 presents the parameters estimation experiments,
section 5 reports some results, and the main
conclusions are presented in section 6.
154
A. B. Oliveira D., Q. Feitosa R. and M. Correia M. (2009).
LIVER SEGMENTATION USING LEVEL SETS AND GENETIC ALGORITHMS.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 154-159
DOI: 10.5220/0001787401540159
Copyright
c
SciTePress

2 THEORETICAL
FUNDAMENTALS
In this section we introduce theoretical fundamentals
related to the level sets method and present then an
overall description of genetic algorithms.
2.1 Level Sets
Level set methods were developed by Sethian and
Osher (Osher and Sethian, 1998) and firstly
introduced in medical imaging by Malladi et al.
(Malladi et al, 1995).
Level set is a continuous deformable model
method with implicit representation. Its main idea is
to embed the deformable model in a d+1
dimensional space, to segment iteratively an object
in a d dimensional space, using partial differential
equations. The main advantage of level sets is that it
allows changes of surface topology implicitly. As it
embeds the evolving surface, also called interface, in
a higher dimensional function, this interface can
split into several connected components or merge
from different connected components naturally, and
the embedding level sets function remains
continuous.
Considering ψ(x,t) the level sets function, x the
position vector and t the time step of the level set
evolution, the evolving surface is represented as the
zero level set of ψ(x,t)=0. The segmentation result is
achieved when the RMS difference between ψ(x,t)=0
and ψ(x,t-1)=0 is less than a pre-defined minimum
RMS value.
The level sets function is normally a smooth well
behaved function, in our work the signed distance
function. This function calculates, for each voxel,
the distance to the closest voxel in the interface. This
distance is negative inside the interface, and positive
outside.
Given an initial surface S
0
and consequently
ψ(x,t=0), the level set function is evolved under the
control of the differential equation 1, as proposed in
ITK library (Yoo et al, 2002), that defines the
displacement of the interface in a time step.
ψκγψβψαψ
∇+∇−∇−= )()()( xZxPxA
d
t
d
(1)
The gradient (or its module) of ψ(x,t) appears in
each term of the equation. As we defined ψ(x,t) as a
signed distance function, the gradient of ψ(x,t) points
from inside to outside considering the interface
ψ(x,t)=0, and |ψ| = 1, by definition.
A, P and Z, are usually calculated from the input
image. A is the advection term. This term is a vector
field responsible for attracting the evolving surface
to determinate features, usually related to boundaries
of objects, and pre-defined barriers. It is weighted by
the constant advection weight α, and multiplied by
the gradient of ψ(x,t).
P is the propagation term. This term is a
propagation image, also called speed image, where
the level sets propagates. This image normally has
high values in regions where the interface can
expand quickly, and values close to zero in regions
where it should move slowly or stop, normally close
to important features. It is weighted by the constant
propagation weight β and multiplied by the module
of the gradient of ψ(x,t).
К is the mean curvature of the interface, and is
defined as the divergence of the normal to the
interface, usually being calculated using first and
second derivatives of the interface, based on finite
differences. In this way, К > 0 for convex regions,
and К < 0 for concave regions. Z is a spatial
modifier for the mean curvature К, and modifies the
value of К
in a determinate spatial position. In this
work it was defined as P, in such a way that the
curvature has less importance when close to
important features. It is weighted by the constant
mean curvature weight γ and multiplied by the
module of the gradient of ψ(x,t).
A segmentation algorithm based on level sets
may use all these terms, or it may omit one or more
terms.
Many of the parameters mentioned until now
must be properly adjusted for the level sets method
to produce accurate result. The determination of
appropriate parameter values can usually not be
done by heuristics mainly due to the complexity of
the target application. Multiple local minima
frequently found in such problems make it difficult
to use non-linear optimization methods for
parameter adjustment.
A well known alternative to estimate
segmentation parameters of complex functions,
usually hard to model analytically or with many
local minima, are Genetic Algorithms.
2.2 Genetic Algorithms
Genetic Algorithms are a computational search
technique to find approximate solutions to
optimization problems. They are based in the
biological evolution of species as presented by
Charles Darwin. The main principle of the Darwin’s
Theory of Evolution is that individual characteristics
LIVER SEGMENTATION USING LEVEL SETS AND GENETIC ALGORITHMS
155

are transmitted from parents to children over
generations, and individuals more adapted to the
environment have greater chances to survive and
pass on particular characteristics to their offspring.
In evolutionary computing terms an individual
represents a potential solution for a given problem,
and its relevant characteristics with respect to the
problem are called genes.
A population is a set of individuals in a particular
generation, and individuals in a population are
graded as to their capacity to solve the problem.
That capacity is determined by a fitness function,
which indicates numerically how good an individual
is as a solution to the problem (Michalewicz, 1994).
GAs propose an evolutionary process to search
for solutions that maximize or minimize a fitness
function. This search is performed iteratively over
generations of individuals. For each generation the
less fitted individuals are discarded and new
individuals are generated by the reproduction of the
fittest. The creation of the new individuals is done
by the use of genetic operators.
A genetic operator represents a rule for the
generation of new individuals. The classical genetic
operators are crossover and mutation. Mutation
changes gene values in a random fashion, respecting
the genes’ search spaces. Mutation is important to
introduce a random component in the search of a
solution in order to avoid convergence to local
minima.
Crossover operators act by mixing genes
between two individuals to create new ones that
inherit characteristics of the original individuals. The
general idea is that an individual’s fitness is a
function of its characteristics, and the exchange of
good genes may produce better fitted individuals
depending on the genes inherited from their parents.
Although less fitted individuals can also be
generated by this process, they will have a lower
chance of being selected for reproduction.
Other genetic operators can be found in the
literature (Michalewicz, 1994). Most of them are
variants of crossover and mutation, adapted for
specific types of problems.
3 SEGMENTATION METHOD
The proposed method relies on two heuristics: the
liver parenchyma is roughly homogeneous, and liver
veins are mainly inside the liver, as well as liver
nodules. The impact of these heuristics on cases
where peripheral nodules and veins are present is
discussed in details in section 6.
The first step is to define, at a slice N, an initial
solution that is expected to contain great part of the
liver. This solution does not need to be accurate, as
it will be later deformed too. Then, an iterative
process takes place, both upwards and downwards,
processing sequentially the whole stack of slices. In
this process the initial solution of a slice to be
processed is defined as the result previously
computed at the adjacent slice.
The same segmentation algorithm is applied in
each iteration step. It receives as input data, the
image slice and the result obtained in the adjacent
slice. This initial solution is then deformed towards
the liver boundaries using an approach based on
level sets.
As seen in section 2.1, one needs to define the
propagation, advection and mean curvature terms, to
create the level set function. However, in this work
the advection term was not used, because the
boundaries of the liver cannot be robustly detected
as the liver usually share similar pixel intensity
values with some of its anatomical neighbouring
structures.
The speed image of the propagation term is
defined by a model based on two automatically
defined thresholds TL and TH (TL<TH) and the
input image g(x). This model is expressed by
equation 2:
⎩
⎨
⎧
−
+−<−
=
otherwisexgTH
TLTLTHxgifTLxg
xP
)(
2/)()()(
)(
(2)
One can notice that P(x) assumes positive values
when the pixel intensity relies inside the range
[TL,TH] and negative values when it is outside the
range. In this way, the surface expands where pixel
values are inside the range, and shrinks otherwise.
The computation of TL and TH is based on the
assumption that the histogram of voxels inside the
liver is usually Gaussian like shaped.
Initially the histogram of the region inside the
initial solution is calculated. Then a Gaussian curve
is fitted to the histogram, using a non-linear
minimization estimator, and two thresholds TL and
TH are computed as the values where the Gaussian
achieves two pre-defined values GL and GH. This
range [TL,TH] of grey level values is expected to be
characteristic of liver parenchyma.
The spatial modifier Z(x) of the mean curvature
К is set as P(x). So Z(x) = P(x).
At this point the level sets process takes place,
deforming the given initial solution towards the liver
boundaries using all the terms just defined, until the
convergence criteria is achieved (minimum RMS).
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
156

This level sets approach segments the liver
parenchyma, but nodules and veins, which normally
appear respectively as darker and brighter regions,
are not segmented. This problem is partially
eliminated by the use of a ‘fill-holes’ morphologic
algorithm, that merges veins and nodules that are
totally inside the liver. When a nodule or vein is at
the periphery, though, they usually do not appear in
the final result.
The process ends when it achieves the first and
last slices, or when an initial segment is vanished by
the level sets algorithm in a given slice.
In this section it was possible to observe that the
method needs five different parameters to run, which
were tuned using an evolutionary approach:
1. Minimum RMS: the convergence criteria of
level sets function, defined in terms of the
root mean squared (RMS) change in the
level set function.
2. GL: Gaussian low factor
3. GH: Gaussian high factor
4. β: level set propagation weight
5. γ: level set mean curvature weight
4 PARAMETERS ADAPTATION
4.1 Processing Scheme
In the devised GA each individual consists of a set
of segmentation parameter values; each parameter is
represented by a gene. The fitness of each solution
(individual) is calculated by comparing the
segmentation produced by the solution with the
reference segmentation, using five different
measures of performance (Heimann et al, 2007), as
described in section 4.3.
As described in section 3, the segmentation
method has a set of five parameters to be optimized:
Minimum RMS, GL, GH, β and γ.
Each parameter value (genes) of the initial set of
solutions (initial population) is generated randomly,
in given ranges. As the evolutionary process
advances, the best solutions (fittest individuals) are
selected and new solutions (generations) are created
from them (reproduction).
The selection of individuals for reproduction
takes the fitness values into consideration, so that the
fittest individuals have a larger probability of being
selected. Furthermore, the best individuals from one
generation are kept in the next generation. The
evolutionary process stops after a fixed number of
generations, and the gene values of the fittest
individual are taken as the final (adapted)
segmentation parameter values.
4.2 Reproduction Procedure
As stated before, the initial population is created by
setting random values for the genes of each
individual. After fitness evaluation a new population
is created by replacing the Q worst individuals of the
prior population, being Q a positive integer value
smaller than the population size.
The new individuals are created by genetic
operations over selected individuals of the prior
population. The selection of individuals is done by a
roulette mechanism, which takes into consideration
normalized fitness values (Davis, 1990).
The following genetic operators were used
(Davis, 1990; Michalewicz, 1994). One point
crossover: two individuals exchange genes;
arithmetic crossover: a linear combination of a set of
genes of two individuals is per-formed; mutation:
the value of a gene is substituted by a random value.
The selection of the reproduction operation is
also done by a roulette mechanism, considering a
predefined probability value for each operator. To
help preventing convergence to local minima, the
operators’ application probabilities are interpolated
during the evolution process (Davis, 1990),
decreasing crossover probability while increasing
mutation probabilities.
In each generation the best individuals can be
saved to the preceding generation, according to a
Steady State rate. This rate specifies the amount of
individuals that will be saved to the next generation.
It is also possible to make more than one
experiment in sequel, and the best individuals of one
experiment are saved to the next experiment,
guiding the following experiment to good solutions.
In this work, the GA was configured as the
following: number of generations = 30; population
size = 30; initial crossover rate = 0.8; final crossover
rate = 0.65; initial mutation rate = 0.1; final
crossover rate = 0.8; initial steady state rate = 0.8;
final steady state rate = 0.2; number of sequenced
experiments = 2; rate of seed from the first
experiment to the second = 0.1.
4.3 Fitness Evaluation
The fitness of an individual should indicate how
good the segmentation result in relation to the
reference segmentation is. In mathematical terms,
given a set of reference segments M and a parameter
vector N a fitness function F(M,N) that properly
LIVER SEGMENTATION USING LEVEL SETS AND GENETIC ALGORITHMS
157
expresses the goodness of a segmentation outcome
must be defined.
Once the fitness function F is chosen, the task of
the GA consists in searching for the parameter
vector Wopt, for which the value of F is minimum:
()
[
]
()
NMF ,minargW
Popt
=
(3)
The fitness function devised in this work is
defined as the mean of five score measures that
evaluate the differences between two different
surfaces: the one obtained by the segmentation
method using the parameters of the evaluated
individual and a given reference.
These score measures were defined taking into
account the variability of the results obtained
manually with different specialists. In this way, it
considers that a high-scored method is as precise as
a human specialist.
To implement this idea, values of the mean error
usually obtained in human manual segmentation
were estimated for each of the five metrics defined.
In this way the score is high when the differences
(errors) between the result and the reference are
similar to the ones usually obtained by the
specialists, and low if the differences are bigger than
that.
The reference and the evaluation metrics are
provided by SLiver07 conference (Heimann et al,
2007), and the evaluation metrics used are:
1. Volumetric overlap (VOE): is the number
of voxels in the intersection of
segmentation and reference, divided by the
number of voxels in the union of
segmentation and reference.
2. Relative absolute volume difference, in
percent (RVD): 1 minus the total volume of
the segmentation divided by the total
volume of the reference
3. Average symmetric absolute surface
distance, in millimetres (ASD): the border
voxels of segmentation and reference are
determined and for each voxel in these sets,
the closest voxel in the other set is
determined (using Euclidean distance). All
these distances are stored, for border voxels
from both reference and segmentation. The
average of all these distances gives the
averages symmetric absolute surface
distance.
4. Symmetric RMS surface distance, in
millimetres (RMSSD): is similar to the
previous measure, but stores the squared
distances between the two sets of border
voxels. After averaging the squared values,
the root is extracted and gives the
symmetric RMS surface distance.
5. Maximum symmetric absolute surface
distance, in millimetres (MSD): is similar
to the previous two, but only the maximum
of all voxel distances is taken instead of the
average.
5 EXPERIMENTAL
EVALUATION
In order to evaluate the performance of the proposed
method a software prototype was developed in
C++/C#. The prototype includes the library that
implements the GA, and the ITK library which
implements the level sets framework used in the
segmentation method.
To estimate the optimal set of parameters, the
prototype allows the user to define the search ranges
of each parameter. In our experiment a set of five
exams was used for training, i.e., for estimation of
segmentation parameter values, using the
evolutionary approach. Then, using the optimal
segmentation parameters found, the other 15 exams
available on the dataset were evaluated.
Table 1: Liver segmentation results.
Evaluation Best Worst Mean
VOE
(Score)
5.45
(78.70)
12.07
(52.82)
7.35
(71.29)
RVD
(Score)
-0.63
(96.63)
8.12
(56.80)
-2.19
(82.27)
ASD
(Score)
0.76
(80.85)
3.57
(10.70)
1.35
(66.25)
RMSSD
(Score)
1.69
(76.46)
8.22
(0)
3.05
(58.58)
MSD
(Score)
17.03
(77.59)
55.09
(27.21)
26.81
(64.72)
Overall Score 82.05 29.57 68.62
Table 1 illustrates the results obtained in the
evaluation phase. We compiled our results, depicting
the best, worst, and mean results for all test set. The
overall score was computed as the simple mean of
the five different metric scores.
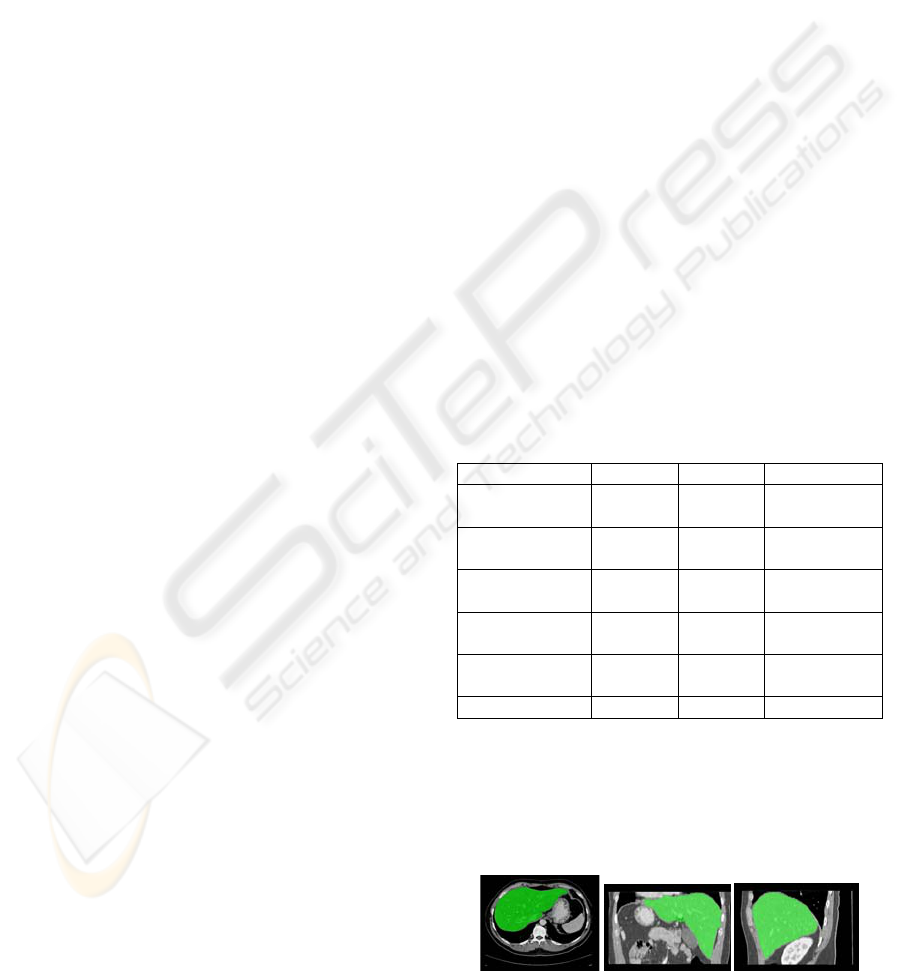
Figure 1: Best result obtained (left) axial view; (center)
coronal view; (right) sagittal view.
(a)
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
158

The method attained a good performance in 17 of
the 20 exams, in which the overall score is above 65.
Figure 1 shows the result obtained in the best case,
with overall score of 82.05. It is possible to observe
that the liver boundaries are accurately defined.
In 3 exams, though, the results contain some
significant errors that can be verified visually. The
exam with the lowest score among all exams tested
has an overall score of 29.57. In this exam the liver
has a huge nodule, and it causes a leak of the
segmented region towards adjacent darker
structures. Considering the size of the nodule, the
result is reasonable, though.
On another exam with low score (46.18) it is
possible to observe a single major error, caused by a
peripheral nodule not classified as liver. This is
explained by the heuristic adopted, that considers a
single Gaussian curve to model liver tissue. Once the
nodule in this exam appears much darker than the
liver parenchyma, its voxel intensities lie outside the
range [TL,TH] defined by the Gaussian fit. As the
nodule is peripheral, it wasn’t possible to correct this
error with morphological fill holes, and therefore the
nodule region was not included in the final result.
Our results can be easily compared with many
other approaches, since the data and evaluation
metrics were obtained from the website of the liver
segmentation competition held in the Sliver07
conference, and the results of other approaches are
also available there. Thus, this comparison with
other works is straightforward once one visits the
conference’s website. If compared with other
automatic and semi-automatic methods, our method
has a good performance being ranked among the top
5 score.
6 CONCLUSIONS
We have presented a method to segment the liver
based on a level sets approach, using an evolutionary
method to estimate its optimal parameters. These
parameters were coded into genes of the individuals
of a GA, and the fitness evaluation was defined to
measure the similarity between a user defined
reference and the segmentation result.
Trough all the experiments it was possible to
verify the potential of the presented methodology.
The use of level sets, which is a consolidate
alternative to segment medical images, achieved
good performances in the tested exams, and the use
of GA to estimate its optimal parameters produced
robust parameters.
The method has, though, some limitations. It
presented some low performances in the presence of
peripheral nodules and veins, and also when nodules
with volume similar to the liver parenchyma were
observed. These cases were presented in details in
section 5.
It is important to notice that the method can be
applied to segment other organs beside the liver,
especially considering the ones roughly
homogeneous. In this case the GA would estimate
other parameters based on the input reference of the
organ to be segmented.
Some suggestions for further research would be a
better modelling to build the speed image
considering also the information of liver internal
structures, such as vessels and nodules. Another
possibility would be use the advection term to
suppress or reinforce some specific barriers, which
could be used to avoid leaking and also enable the
inclusion of peripheral nodules and veins in the final
result.
REFERENCES
Davis L. Handbook of Genetic Algorithms. Van Nostrand
Reinhold Company, New York, 1990.
Fujimoto H., Gu L., and Kaneko T., “Recognition of
abdominal organs using 3D mathematical
morphology,” Trans. Inst. Electron. Inf. Commun.
Eng. D-II, no. 5, pp. 843-850, May 2001.
Heimann T.; van Ginneken B.; Styner M.. "3D
Segmentation in the Clinic: A Grand Challenge",
(Eds.): 3D Segmentation in the Clinic: A Grand
Challenge, pp. 7-15, 2007.
Malladi, R. ,Sethian, J.A., Vemuri, B.C.. Shape modeling
with front propagation: a level set approach. IEEE
rans. Pattern Anal. Mach. Intell. 17 (2) 158–175, 1995.
Michalewicz Z (1994) Genetic Algorithms + Data
Structures = Evolution Pro-grams. Springer-Verlag,
Berlin Heidelberg New York
Lamecker H., Zachow S., Haberl H., Stiller M.. Medical
Applications for Statistical 3D Shape Models. Proc.
Computer Aided Surgery Around the Head, volume 17
of Fortschritt- Berichte VDI, p. 61, 2005.
Osher S., Sethian J. Fronts propagating with curvature-
dependent speed: algorithms based on Hamilton-
Jacobi formulations. J. Comput. Phys. 79 (1998) 12–
49.
Yoo T.S., Ackerman M. J., Lorensen W. E., Schroeder W.,
Chalana V., Aylward S., Metaxes D., Whitaker R..
Engineering and Algorithm Design for an Image
Processing API: A Technical Report on ITK - The
Insight Toolkit. In Proc. of Medicine Meets Virtual
Reality, J. Westwood, ed., IOS Press Amsterdam pp
586-592 (2002).
LIVER SEGMENTATION USING LEVEL SETS AND GENETIC ALGORITHMS
159
