
OBJECT DETECTION AND TRACKING USING KALMAN FILTER
AND FAST MEAN SHIFT ALGORITHM
A. Ali and K. Terada
The University of Tokushima, 2-1 Minami-Josanjima, Tokushima, 770-8506 Japan
Keywords:
Change Detection, Object Tracking, Kalman filter, Mean shift Algorithm.
Abstract:
Object detection in videos involves verifying the presence of an object in image sequences and possibly locat-
ing it precisely for recognition. Object tracking is to monitor an object’s spatial and temporal changes during
a video sequence, including its presence, position, size, shape, etc. These two processes are closely related be-
cause tracking usually starts with detecting objects, while detecting an object repeatedly in subsequent image
sequence is often necessary to help and verify tracking. In this paper, a novel approach is being presented for
detecting and tracking object. It includes combination of Kalman filter and fast mean shift algorithm. Kalman
prediction is measurement follower. It may be misled by wrong measurement. In order to cater it, fast mean
shift algorithm is used. It is used to locate densities extrema, which gives clue that whether Kalman prediction
is right or it is misled by wrong measurement. In case of wrong prediction, it is corrected with the help of
densities extrema in the scene. The proposed approach has the robust ability to track the moving object in the
consecutive frames under some kinds of difficulties such as rapid appearance changes caused by image noise,
illumination changes, and cluttered background.
1 INTRODUCTION
Object detecting and tracking has a wide variety
of applications in computer vision such as video
compression, video surveillance, vision-based con-
trol, human-computer interfaces, medical imaging,
augmented reality, and robotics. It also plays an
important role in video database such as content-
based indexing and retrieval. Change detection tech-
niques presented in the literature can be divided
in two classes: pixel-based and region-based algo-
rithms(Jain, 1989). Pixel-based algorithms compute
the output by analyzing the values assumed by corre-
spondent pixels in the two analyzed images; region-
based algorithms compare features extracted from
correspondence regions in the two images. Pixel-
based methods, (e.g. Change detection based on bi-
nary difference) present the advantage of the sim-
plicity that makes possible real-time applications,
whereas region-based techniques (e.g. Change de-
tection based on the illumination model(Skifstadt and
Jain, 1989)) provide results more robust to false
alarms introduced by noise. A further class of CD al-
gorithms detects changed regions by means of edge
comparisons(Jain, 1989). The Kalman filter has
been extensively used in the vision community for
tracking. Broida and Chellappa(Broida and Chel-
lappa, 1986) used the Kalman filter to track points in
noisy images. In stereo camera-based object tracking,
Beymer and Konolige(Beymer and Konolige, 1999)
use the Kalman filter for predicting the objects po-
sition and speed in x - z dimensions. Rosales and
Sclaroff(Rosales and Sclaroff, 1999) use the extended
Kalman filter to estimate 3D trajectory of an object
from 2D motion. A common approach to handle com-
plete occlusion during tracking is to model the ob-
ject motion by linear dynamic models or by nonlin-
ear dynamics and, in the case of occlusion, to keep
on predicting the object location until the object reap-
pears. For example, a linear velocity model is used in
Beymer and Konolige(Beymer and Konolige, 1999)
and a Kalman filter is used for estimating the loca-
tion and motion of objects. For the image segmen-
tation problem, Mean-Shift Clustering is commonly
used. Comaniciu and Meer(Comaniciu and Meer,
2002) propose the mean-shift approach to find clus-
ters in the joint spatial and color space.
In this paper we propose a novel object tracking
scheme showing good tracking performance in the
consecutive frames under some kinds of difficulties.
It combine Kalman filter and fast mean shift algo-
585
Ahmed A. (2009).
OBJECT DETECTION AND TRACKING USING KALMAN FILTER AND FAST MEAN SHIFT ALGORITHM.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 585-589
DOI: 10.5220/0001787705850589
Copyright
c
SciTePress

rithm. The paper is organized as follows: section 2
gives a brief overview on the tracking algorithm and
also gives details on the proposed tracking algorithm ;
The experimental results are demonstrated in Section
3. Finally, the paper is concluded in section 4.
2 TRACKING ALGORITHM
Object tracking is the problem of estimating the po-
sitions and other relevant information of moving ob-
jects in image sequences. Two-frame tracking can
be accomplished using correlation-based matching
methods, optical flow techniques, or change-based
moving object detection methods. In this paper, the
tracking accomplished by using change-based mov-
ing object detection method. The tracking algorithm
is briefly described in next subsections.
2.1 Change-based Object Tracking
Method
Change detection by background subtraction is a
common approach to detect moving foreground. The
resulting difference image is usually thresholded to
obtain objects based on pixel connectedness and re-
sulting blob objects are subsequently tracked(Bovik,
2000). The Change-based tracking algorithm can be
described as follows:
• Image subtraction to detection motion blobs:
– Compute the difference image between two
frames
– Thresholding to find the blobs
– Locate the blob center as the position of object
• Track the object by track the blob center
For target with not so much cluttered background or
little illumination changes and there is no motion in
the images being used to generate the stationary back-
ground, results obtained by this technique is of very
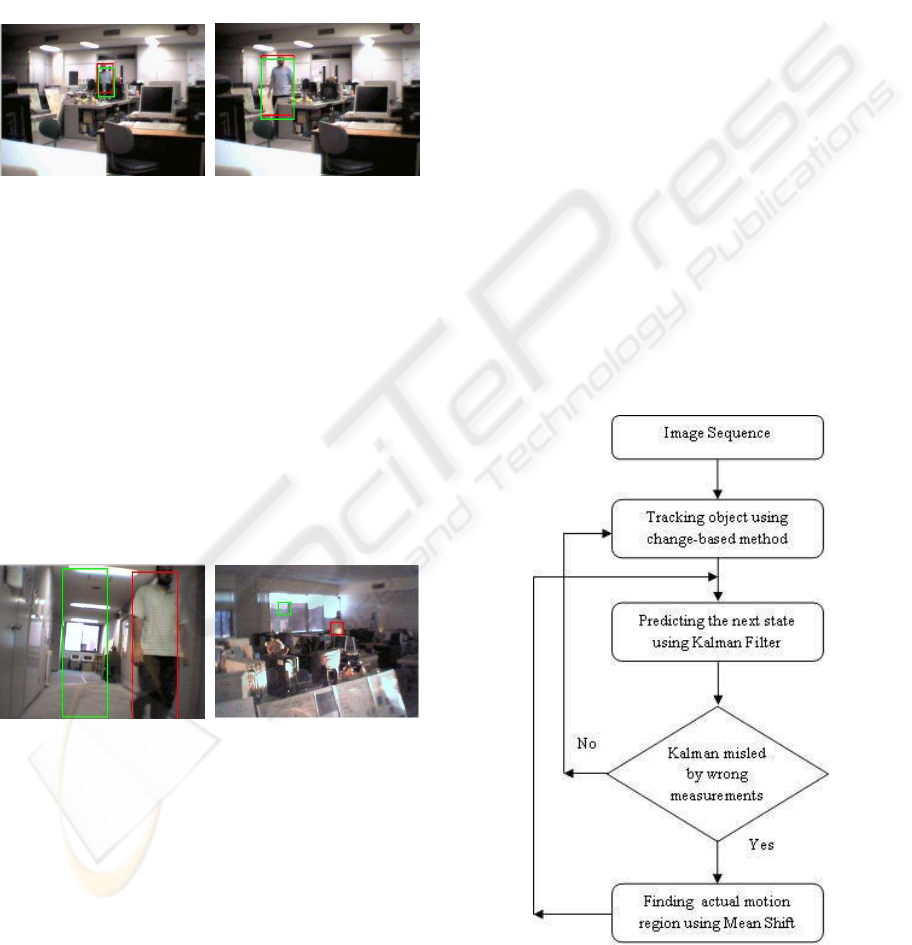
high accuracy as shown in fig.1.
(a) Frame 151 (b) Frame 226
Figure 1: Tracking using change-based detection.
2.2 Difficulties with the Tracking
Method
In change detection where the reference frame is a
stationary background image that has been generated
in an initialization phase using a simple averaging, it
is of paramount importance that there is no motion
in the images being used to generate the stationary
background. However, in practice, it is very difficult
or almost impossible to ensure that there is no motion
during the initialization phase in real-life applications
(in many situations where you do not have full con-
trol over the environments – for example, in traffic
monitoring and video surveillance applications)(Ong
and Spann, 1999). Cheung and Kamath(Cheung
and Kamath, 2004) studied the methods for generat-
ing a background model, such as frame differencing,
median filter, linear predictive filter, non-parametric
model, kalman filter and Mixture of Gaussians model.
An example of such situation, only change-based
tracking technique didn’t correctly track the object as
shown in fig.2.
(a) Frame 135 (b) Frame 196
Figure 2: The tracker lost the object.
In order to tackle the above-mentioned problem,
Kalman tracker was embedded in the algorithm.
Kalman filter continuously predicts the next state of
the target(Grewal and Andrews, 2001) based on the
measurement of change-based technique. Kalman
predictor helps in finding where the object is most
likely to be found in the next frame. A good result ob-
tained after embedding Kalman Tracker as shown in
fig.3. its clear that Kalman tracker successfully track
the object.
2.3 Tracking Using Kalman Filter
A Kalman filter is used to estimate the state of a
linear system where the state is assumed to be dis-
tributed by a Gaussian. Kalman filtering is composed
of two steps, prediction and correction(Bar-Shalom
and Foreman, 1988). TheKalman filter a recursivees-
timator. This means that only the estimated state form
the previous time step and the current measurement
are needed to compute the estimate for the current
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
586
state. In contrast to batch estimation techniques, no
history of observations and/or estimates is required.
Fig.3(a) and (b) show this scenario. Red window
shows the location where the target is detected, while
green window shows the Kalman prediction window.
It was decided that when the measurement differ from
the predicted position by more than a certain thresh-
old value, then the measurement will be discarded and
the Kalman prediction will be taken as the next posi-
tion of the target.
(a) Frame 130 (b) Frame 215
Figure 3: The object successfully tracked after embedding
Kalman tracker; the red rectangle show the tracking using
change-based and the green rectangle show the tracking us-
ing Kalman.
2.4 Difficulties Using Kalman Filter
The major problem with the tracking was that of the
target detection. Measurements given by the detec-
tor are sometimes very noisy due to rapid appearance
changes caused by image noise, illumination changes,
cluttered background. Kalman prediction is measure-
ment follower. It may be misled by wrong measure-
ment. An example of such situation is shown in fig.4.
(a) (b)
Figure 4: Kalman filter lost the object by wrong measure-
ments.
In order to treat it, fast mean shift algorithm is used.
It is used to locate densities extrema, which gives clue
that whether Kalman prediction is right or it is misled
by wrong measurement. In case of wrong prediction,
it is corrected with the help of densities extrema in the
scene. Local density maxima in the difference image
– usually representing moving objects – are outlined
by a fast non-parametric mean shift clustering proce-
dure.
2.5 Fast Mean Shift Algorithm
The mean shift algorithm is a nonparametric tech-
nique to locate density extrema or modes of a given
distribution by an iterative procedure(C. Beleznai and
Bischof., 2005). Starting from a location x the local
mean shift vector represents an offset to x
′
, which is a
translation towards the nearest mode along the direc-
tion of maximum increase in the underlying density
function. The local density is estimated within the
local neighborhood of a kernel by kernel density es-
timation where at a data point a kernel weights K(a)
are combined with weights associated with the data.
.For digital images sample weights are defined by the
pixel in intensities at pixel locations a. the new lo-
cation vector x
′
obtained after applying the mean shift
offset. Fast mean shift algorithm was embedded in the
algorithm. If pixel difference between detected mea-
surement obtained by change-based method (the blob
center of the object)and Kalman filter predicted po-
sition is greater than a certain threshold, then motion
region is detected by triggering fast mean shift algo-
rithm and it guides Kalman filter, by finding actual
motion region in the scene, for more accurate predic-
tion of next state of the object. Below the proposed
tracking algorithm scheme can be described by the
following diagram (fig.5).
Figure 5: The proposed Tracking Algorithm scheme.
OBJECT DETECTION AND TRACKING USING KALMAN FILTER AND FAST MEAN SHIFT ALGORITHM
587

3 EXPERIMENTS AND RESULTS
This section show the results obtained by the pro-
posed algorithm. The system was tested using In-
tel(R) Core Duo CPU device with 2.10 GHZ and 3GB
of RAM and Window XP operation system, and Mat-
lab R2007b are used. In addition, four image se-
quences(both indoors and outdoors) are used for test-
ing the system and each image sequence consists of
video frames with 320x240 resolutions per frame. It
is clear from fig.6 (a) that a person walking in a clut-
tered background under the light sources and lighting
changes reflected by the white boards put aside.
(a) Image sequence one
(b) Image sequence two
(c) Image sequence three
Figure 6: Kalman tracker successfully tracked the object
guided by mean shift algorithm.
Figure 7: Image sequence four; Kalman tracker success-
fully tracked pedestrian in outdoor scenes guided by mean
shift algorithm.
After emerging mean shift algorithm, the object suc-
cessfully detected by mean shift algorithm and pre-
cisely tracked by Kalman predictor by following the
true measurement taken by mean shift detector. An-
other example to test the system using different noisy
images caused by different lighting sources as shown
in fig.6(b). the system was chalenged with a very
noisy image sequence caused by rapid illumination
changes due to different sources of lighting and due to
the walking person shadow as shown in fig.6(c). An
example of outdoor waking person to test the system
by using PETS 2001 Image Sequences. The results
show that the system excellently tracked the object as
shown in fig.7. The satisfactory results are achieved.
By comparing the results taken only using Kalman fil-
ter (see fig. 4) and the result taken by the system after
embdding Mean Shift Algorithm (see fig. 6), its clear
that the system overcomes these difficults by success-
fully detected the motion area. Finally, the perfor-
mance of the system was evaluated using the process-
ing time of the test video sequences as shown in Table
1. The average processing time of every frame is be-
tween 0.025 and 0.031 second. Therefore, it can be
applied to real-time application.
Table 1: The processing time of test video sequences.
Test video seqs No. Frames Track. T.(s)
video seq.1 50 1.56
video seq.2 70 1.95
video seq.3 60 1.71
video seq.4 100 2.53
4 CONCLUSIONS
This paper presents a novel approach for object de-
tection and tracking. It includes combination of
Kalman filter and fast mean shift algorithm. The sys-
tem start by detecting the object using change detec-
tion technique and track the object by track the blob
center of the detected object. To increase the effi-
ciency of the algorithm, Kalman filter works parallel
with the tracking algorithm. Kalman filter continu-
ously predicts the next state of the target based on
the measurement of change-based technique. Under
some kinds of difficulties such as rapid appearance
changes caused by image noise, illumination changes,
and cluttered background, Kalman prediction may be
misled by wrong measurement. If pixel difference
between detected measurement obtained by change-
based method and kalman filter predicted position is
greater than a certain threshold, then fast mean shift
algorithm is used. It is used to locate densities ex-
trema, which gives clue that whether Kalman predic-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
588

tion is right or it is misled by wrong measurement.
In case of wrong prediction, it is corrected with the
help of densities extrema in the scene. The proposed
method is an efficient video object tracking algorithm.
Furthermore, to consider the situations of tracking
multiple objects, every one of multiple objects can be
set an Kalman filter to track it. Also since the pro-
cessing time using the proposed method to track the
moving object is short, therefore, the system imple-
mented by the proposed method can afford to track a
moving objects in real time.
REFERENCES
Bar-Shalom, Y. and Foreman, T. (1988). Tracking and Data
Association. Academic Press Inc.
Beymer, D. and Konolige, K. (1999). Real-time tracking of
multiple people using continuous detection. In IEEE
International Conference on Computer Vision (ICCV)
Frame-Rate Workshop.
Bovik, A. (2000). Handbook of Image and Video Processin.
Academic Press.
Broida, T. and Chellappa, R. (1986). Estimation of object
motion parameters from noisy images. In IEEE Trans.
Patt. Analy. Mach. Intell.
C. Beleznai, B. F. and Bischof., H. (2005). Ieee inter-
national workshop on visual surveillance and perfor-
mance evaluation of tracking and surveillance. In
Breckenridge.
Cheung, S. C. S. and Kamath, C. (2004). Robust techniques
for background subtraction in urban traffic video. In
SPIE Electronic Imaging: Video Communications and
Image Processing.
Comaniciu, D. and Meer, P. (2002). Mean shift: A ro-
bust approach toward feature space analysis. In IEEE
Trans. Patt. Analy. Mach. Intell.
Grewal, M. S. and Andrews, A. G. (2001). Kalman Filtering
Theory and Practice using MATLAB, second edition.
John Wiley & Sons, Inc.
Jain, A. K. (1989). Foundamentals of Digital Image Pro-
cessing. Prentice-Hall.
Ong, E. P. and Spann, M. (1999). Robust optical flow com-
putation based on least-median of squares regression.
In International Journal of Computer Vision.
Rosales, R. and Sclaroff, S. (1999). 3d trajectory recov-
ery for tracking multiple objects and trajectory guided
recognition of actions. In IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR).
Skifstadt, K. and Jain, R. (1989). Illumination independent
change detection for real world sequences. In Graph-
ics, and Image Processing.
OBJECT DETECTION AND TRACKING USING KALMAN FILTER AND FAST MEAN SHIFT ALGORITHM
589
