
TESSELLATING ALGEBRAIC CURVES AND SURFACES
USING A-PATCHES
Curtis Luk and Stephen Mann
University of Waterloo, 200 University Ave W., Waterloo, Ontario, Canada
Keywords:
Algebraic surfaces, A-patches, Tesselation.
Abstract:
This work approaches the problem of triangulating algebraic curves and surfaces with a subdivision-style algo-
rithm using A-patches. An algebraic curve or surface is converted from the monomial basis to the Bernstein-
Bezier basis over a simplex. If the coefficients are all positive or all negative, then the curve or surface does
not pass through the domain simplex. If the scalar Bernstein coefficients are of mixed sign and have a layer
separating the positive from the negative, then the patch is in A-patch format and can be efficiently tessellated.
Cases of mixed sign without a separating layer are resolved by subdividing the structure into a set of smaller
patches and repeating the algorithm.
Using A-patches to generate a tessellation of the surface has the advantage of reducing the amount of subdi-
vision required. And because of the A-patch properties, we are guaranteed that features within the designated
region will not be missed.
1 INTRODUCTION
With modern graphics cards, it is possible to render
implicit surfaces directly on the GPU without tessel-
lating them. However, tessellation is still one viable
method of rendering implicit surfaces, and fast, ac-
curate methods of tessellation remain important. One
prevalent method of triangulating implicit surfaces in-
volves the use of subdivision, which is the process
of dividing space into regions that can be recursively
split into increasingly smaller regions.
There are several advantages in using A-Patches
to construct a triangular approximation of an alge-
braic surface, which are the ease in which A-Patches
can be evaluated for low degree polynomials and the
ease in which points on the surface can be found
within an area that is in A-Patch form. Most im-
portantly, it can be shown that a domain that con-
forms to specific A-Patch configurations has a small
number of single-sheeted orientations that can exist
within the patch. This removes various ambiguities
that could pose problems when evaluating complex
surfaces, such as self-intersections and singularities.
Some subdivision algorithms require subdomains
to be highly subdivided to generate a tessellation with
a high sampling rate, which is used to generate a high
quality surface approximation. The A-Patch method
can finely tessellate surfaces with less use of repeated
recursive subdivision of the target space. More impor-
tantly, our method will not misclassify multisheeted
regions as having a single sheet, nor will it miss small,
disconnected components within the region of inter-
est.
1.1 Background
An implicit surface in 3-space is the set of all points
where F(x,y,z) = 0. If F is polynomial, then the sur-
face is said to be algebraic. The problem of tessel-
lating an implicit surface has been tackled in the past,
and such schemes can be classified in one of several
categories. Subdivision schemes such as Marching
Cubes (Lorensen and Cline, 1987) attempt to find a
polygonalization of an implicit surface by dividing
the space into a three dimensional grid. The grid cells
are further divided to smaller components. This class
of algorithm can make the surface extremely costly to
evaluate at areas of high precision.
Ray casting is another method to generate a polyg-
onalization of an algebraic surface, which is done by
finding intersections between lines projected from an
origin point and the surface. Although ray casting can
tessellate a surface to any arbitrary degree of precision
by casting an increasing number of rays, it must rely
82
Luk C. and Mann S. (2009).
TESSELLATING ALGEBRAIC CURVES AND SURFACES USING A-PATCHES.
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications, pages 82-89
DOI: 10.5220/0001790400820089
Copyright
c
SciTePress

on alternate methods for detecting anomalies such as
self-intersections and singularities. Also, although the
method can sample an arbitrary number of points on
the surface, ray casting cannot infer the topology of
the surface without using a point cloud surface con-
struction algorithm (Wang et al., 2005).
There exists another class of approximating alge-
braic surfaces using piecewise parametric surfaces.
Bajaj and Xu propose one such technique (Bajaj and
Xu, 1997), with parametric surface patches being
grown around pre-computed seed singularities. This
method provides the advantage of generating a para-
metric representation of the surface (as opposed to
a piecewise linear approximation) of the surface, al-
though the process involved requires several major
steps, including computation of the singularities, di-
rect triangulation, and fitting parametric patches over
the triangulation. On the other hand, Jepp, van
Overveld, Wyvill, and Wyvill (Wyvill et al., 2000)
propose a method combining marching cubes with
subdivision surfaces to approximate an implicit sur-
face. This method is capable of generating approxi-
mations at real-time speeds, but the accuracy of the
surface in relation to the defined algebraic surface is
sacrificed as a result.
1.2 Previous Work
The concept of the trivariate Bernstein-B
´
ezier basis
representation within a tetrahedral volume is not new.
Sederberg (Sederberg, 1985) defines such a structure,
which he calls an algebraic surface patch, as a tool
for modeling free form algebraic surfaces due to its
ability to define a wide variety of surfaces with a
low degree compared to parametric surfaces and since
they inherently define half-spaces, which is useful for
modeling solid geometry. Bajaj (Bajaj and Ihm, 1992)
proposed using A-patches for fitting surface data and
later (Bajaj et al., 1995) proposed a method of build-
ing models using piecewise A-patches. Specifically,
a set of A-patches is used to construct models that
are C
1
continuous and match the topology of the orig-
inal model specification. A-patches were also pro-
posed for constructing algebraic surfaces (Bajaj and
Xu, 1997), although unlike the method presented here
it uses the patches as spline surfaces that approximate
the algebraic surface as opposed to using A-patch
properties to compute points on the surface.
The use of subdivision algorithms for tessellating
algebraic surfaces is not a recent phenomenon, with
Bloomenthal (Bloomenthal, 1988) proposing a tes-
sellation method that relies on repeated subdivision
of a domain space and surface-line intersection eval-
uation. Further, more recent work on subdivision-
style polygonalization algorithms have been pursued
by Belyaev and Ohtake (Ohtake and Belyaev, 2002)
on implicit surfaces with sharp features. Unlike pre-
vious subdivision methods, our A-patch scheme relies
on the tetrahedron as opposed to the cube as a unit
space. This is due to the geometric requirements dic-
tated by the structure of the A-patch, although subdi-
viding a tetrahedron is a more difficult task than sub-
dividing a cube.
This paper will investigate both the theoretical and
implementation aspects of the basic A-patch surface
approximation method. We begin with a review of
A-patches, after which we present an algorithm for
finding a piecewise linear approximation to a 2D al-
gebraic curve. We then generalize the algorithm to
tessellate algebraic surfaces in 3D.
2 A-patch BASICS
An algebraic surface patch (also known as an A-
patch) is essentially a piece of an algebraic surface
that is constrained within an arbitrary tetrahedron.
The contour of the surface contained within the tetra-
hedron is determined by the weight of its control
points. In A-patch form, the algebraic surface is rep-
resented in the Bernstein-B
´
ezier basis. Normally, al-
gebraics are represented as a vector of scalars that cor-
responds to the monomial basis
M
n
(P) = x
a
y
b
z
c
,
where 0 ≤ a, b,c and a + b + c = n. The Bernstein-
B
´
ezier basis in three-space is
B
n
~
i
(P) =
n
~
i
p
i
0
0
p
i
1
1
p
i
2
2
p
i
3
3
,
where
~
i = (i
0
,i
1
,i
2
,i
3
) with 0 ≤ i
0
,i
1
,i
2
,i
3
and i
0
+
i
1
+ i
2
+ i
3
= n and where p
0
, p
1
, p
2
, p
3
are the
Barycentric coordinates of P relative to a domain
tetrahedron T = 4ABCD. The A-patch uses the
Bernstein-B
´
ezier basis to weigh scalar values in the
following relationship:
F(P) =
∑
~
i
C
i
B
n
~
i
(P).
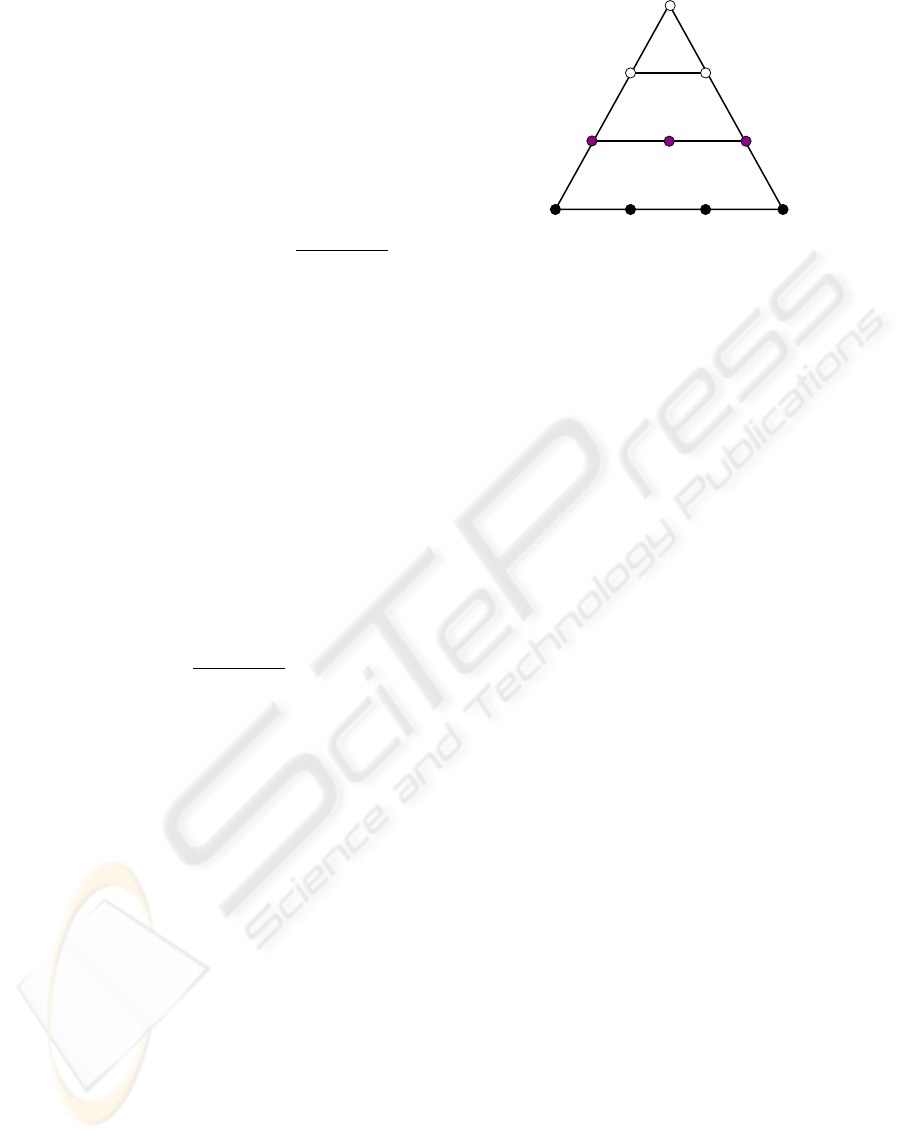
The scalar coefficients C
i
(also called control points)
have no location in the space we are interested in, al-
though one can imagine them to be distributed evenly
across the triangular domain as Bernstein/B
´
ezier con-
trol points of the patch as seen in Figure 1; this visual-
ization will be particularly helpful when talking about
the separating layer of control points in the later sec-
tions of this paper. For a Bernstein/B
´
ezier represen-
tation to be an A-patch, its coefficients must satisfy
TESSELLATING ALGEBRAIC CURVES AND SURFACES USING A-PATCHES
83

C
0020
C
0110
C
0200
C
1010
C
0011
C
011
C
020
C
110
C
002
C
200
C
101
C
1100
C
1001
C
2000
C
0002
Figure 1: Visualizing the B
´
ezier coefficients in the domain.
certain conditions on their signs, as we will discuss in
Sections 4 and 5.
The two dimensional representation of a polyno-
mial curve in monomial form is similar to its three
dimensional surface counterpart. The only difference
is that there is one less variable. This means that the
monomial basis becomes
M
n
(P) = x
a
y
b
,
where 0 ≤ a, b and a+b = n. The bivariate Bernstein-
B
´
ezier basis is
B
n
~
i
(P) =
n
~
i
p
i
0
0
p
i
1
1
p
i
2
2
,
where
~
i = (i
0
,i
1
,i
2
) with 0 ≤ i
0
,i
1
,i
2
and i
0
+i
1
+i
2
=
n and where p
0
, p
1
, and p
2
are the Barycentric coor-
dinates of P relative to a domain triangle T = 4ABC.
Standard change of basis algorithms can be used
to convert between the monomial and Bernstein repre-
sentations. Evaluating the algebraic function in Bern-
stein form at a point in the region can be accom-
plished by performing a de Casteljau evaluation of the
A-patch. de Casteljau’s algorithm also subdivides a
curve into two sets of control points, each of which
is the representation for the curve over a subdomain
determined by the evaluation point. de Casteljau’s al-
gorithm can also subdivide higher order B
´
ezier func-
tions, although these methods become more complex
as the dimension increases. For details on Bernstein-
B
´
ezier representations, change of bases, and subdivi-
sion algorithms, see (Farin, 2002).
2.1 Conditional A-patches and
Application
A-patches have six characteristics that are defined
by Sederberg in his paper regarding algebraic sur-
face patches (Sederberg, 1985). These come into
play when we devise methods to generate tessella-
tions from A-patches. We list the two properties that
are most important for our purposes:
Point Interpolation Property. F(P) at any of the
tetrahedral vertices corresponds to the weight of the
control point at that vertex.
Line Interpolation Property. If the weights of all
the control points along an edge are zero, then the
edge interpolates the surface F(P) = 0.
More importantly, Sederberg (Sederberg, 1985)
(Sederberg and Anderson, 1985) and Guo (Guo,
1995) showed that if monotonicity conditions hold
on edge lines of a tetrahedron then all parallel lines
will intersect the algebraic surface at most once. Ba-
jaj (Bajaj et al., 1995) elaborates on this by formaliz-
ing the concept of the three-sided and four-sided al-
gebraic patch, both of which are shown to be single-
sheeted and non-singular. In addition, the algebraic
patches Bajaj propose do not require the monotonic
conditions outlined by Sederberg, and instead impose
restrictions on the signs of the coefficients.
We restate Bajaj’s definition of three and four-
sided A-patches:
Definition: Three-sided Patch. Let the surface
patch S
F
be smooth on the boundary of the tetra-
hedron T = 4e
0
e
1
e
2
e
3
. If any open line segment
(e
j
,α∗) with α∗ ∈ S
j
= {(α
1
,α
2
,α
3
,α
4
)
T
: α
j
=
0,α
i
> 0,
∑
i6= j
α
i
= 1} intersects S
F
at most once
(counting multiplicities), then we call S
F
a three-sided
j-patch.
Definition: Four-sided Patch. Let the surface
patch S
F
be smooth on the boundary of the tetrahe-
dron T = 4e
0
e
1
e
2
e
3
). Let (i, j,k,l) be a permutation
of (1, 2,3,4). If any open line segment (α∗, β∗) with
α∗ ∈ (e
i
e
j
) and β∗ ∈ (e
k
e
l
) intersects S
F
at most once
(counting multiplicities), then we call S
F
a four-sided
i j-kl-patch.
Using the above information we can generate
approximations of surfaces and curves with three
and four-sided A-patches and their two dimensional
equivalent. To find this using just the Bernstein co-
efficients and the domain tetrahedron, we must find a
set of edge points whose weights have opposite signs.
From there we can find the point between the pairs
where F(P) = 0. Sections 4 and 5 will elaborate on
the basic outline provided here.
3 THEOREMS
From the basic properties of A-patches we can de-
rive a number of theorems that will be relevant to the
A-patch tessellation algorithm. Although Bajaj states
conditions for a single-sheeted surface, we must also
determine regions that do not contain the surface. The
following theorems justify the method to find these
regions by finite subdivision of the region and inves-
tigation of the coefficients of the empty regions.
Theorem 1: Given a d dimensional simplex T =
4V
0
V
1
.. .V
d
and a dimension d, degree n polynomial
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
84
F with Bernstein coefficients C
~
i
over T , if C
~
i
> 0 for
all
~
i then F(p) > 0 for all p ∈ T .
Proof: This follows immediately from the Bern-
stein basis functions forming a convex combination
over T .
Theorem 2: Given a dimension d, degree n alge-
braic function F whose value is strictly greater than
ε > 0 on the interior of a simplex T and where the
Bernstein representation of F over T has coefficients
of mixed sign. Then over any aligned subsimplex T
s
of T with edge lengths no greater than
1
2
d−N(2d+2)
n
/εe
of
the size of those of T , the Bernstein coefficients of F
over T
s
are all non-negative, where N < 0 is the most
negative Bernstein coefficient of F represented over
T .
Proof Sketch: The proof proceeds by considering
an arbitrary, aligned subsimplex whose edges are half
the length of the initial simplex. We can show that the
most negative coefficient of the subsimplex will be at
least a fixed amount larger than the most negative co-
efficient of the initial simplex, where the fixed amount
is dependent on ε, d, and n (i.e., it is independent of
the Bernstein coefficients). From here, we just find
the number of “halvings” needed to ensure that all the
Bernstein coefficients are positive. See (Luk, 2008)
for details.
Lemma 3: For any set of simplices covering T
where each simplex can be embedded in an aligned
subsimplex of T of size
1
2
d−N(2d+2)
n
/εe
then the Bern-
stein coefficients of F over each subsimplex will be
non-negative.
Proof: The lemma follows immediately from the
Theorem 2.
Comments: The theorems and lemmas also hold
for F(p) < 0, F(p) < ε < 0, etc. Also note that
Lemma 3 is a very loose bound on the number of sub-
divisions needed to have all the coefficients be of one
sign when working in a region where F(p) > 0; in
general, we expect (and observed) much faster con-
vergence than this. While Theorem 1 is a well known
simple observation, Theorem 2 and Lemma 3 are new
and are a specialized generalization of the property
that the B
´
ezier curve control polygon converges to the
curve under repeated subdivision.
4 APPROXIMATING ALGEBRAIC
CURVES
We begin by presenting a method for finding a piece-
wise linear approximation to a 2D algebraic curve.
We assume that the user has selected a region of in-
terest, and that this region has been triangulated. We
Figure 2: A possible separating layer in an ideal two-
pointed A-patch. The white have negative sign; the black
have positive sign; the magenta is the separating layer, and
the coefficients may have either sign.
then find the Bernstein representation for the alge-
braic function over each triangle.
After converting to Bernstein-B
´
ezier format, it is
necessary to determine whether each triangle contains
the curve. This can be determined by examining the
sign of the Bernstein coefficients. If all the coeffi-
cients of a triangle are non-zero and of one sign, then
the curve does not pass through the triangle (Theorem
1), and the triangle need no longer be considered.
Triangles with Bernstein-B
´
ezier coefficients of
mixed sign can be categorized into two different
classes. The first is what we will refer to as a two-
pointed A-patch. For a Bernstein representation to
be a two-pointed A-patch with domain triangle T =
4ABC, there must exist a vertex control point (as-
sume it is A for discussion) such that F(A) does not
have the same sign as F(B) and F(C). In addition,
there must exist a layer of mixed-sign control points
that separates a set of positive control points from a
set of negative control points, illustrated in Figure 2.
See (Bajaj and Xu, 1997) for a more formal definition
of an A-patch.
If the Bernstein representation is a two-pointed
A-patch, then the curve can be approximated within
the domain of the patch as described in the next sec-
tion. Otherwise, we will perform a 4-to-1 subdivision
of the triangle. The control points of the four new
patches are computed and the search for a separating
layer is performed on each subtriangle.
In our implementation, we used a 4-to-1 subdi-
vision (B
¨
ohm, 1983); however, a 2-to-1 subdivision
would produced similar results and would be easier
to implement (Peters, 1994).
4.1 Approximating the Curve
Let 4ABC be the domain for a two-pointed A-patch
F with a separating layer. In this situation, two of
the corner B
´
ezier coefficients will have one sign (e.g.,
TESSELLATING ALGEBRAIC CURVES AND SURFACES USING A-PATCHES
85

Figure 3: Curve properties that are not present in an A-patch
with a separating layer.
F(A) > 0 and F(B) > 0), and the third coefficient
(e.g., F(C) < 0) will have the opposite sign. Be-
cause of the separating property, the algebraic func-
tion’s value at any point on the edge AB will have the
same sign as F(A) and F(B). We will sample AB for
a sequence of points, P
1
,P
2
,. .., P
s
, and for each point
P
i
, we consider the line between it and C.
Again, because of the separating layer, there is
one zero of F along the line segment P
i
C. A nu-
merical search can quickly find this zero. Our piece-
wise linear approximation to the curve in this region
is made by connecting this sequence points at which
F is zero. The single-sheeted properties of the patch
will guarantee that by interpolating from one vertex to
the other we do not need to consider certain features,
such as those seen in Figure 3.
Figure 4 shows some examples of implicit curves
evaluated in this manner. Lemma 3 ensures that we
will eventually stop subdividing in regions that do not
contain the curve. However, if there is a singularity
in the curve, an A-patch over any triangular region
containing this singularity will not have a separating
layer. As the algorithm refines in this region, the sin-
gularity will become more and more localized, but if
the precise location of the singularity is desired, an-
other method must be used to find it.
Figure 5 shows the subdivision of space of a curve
that has a singularity. Notice the increasing depth of
subdivision near the singularity. Also note that sub-
division stops fairly quickly in regions not containing
the curve, and that away from the singularity, the tri-
angles were in A-patch format at a fairly coarse level,
even if the curve just clipped a triangle or if the curve
passed through the triangle at unusual angles.
5 TESSELLATING ALGEBRAIC
SURFACES
We now consider algebraic surfaces. To improve
computational efficiency of the surface construction
algorithm it is essential to have a good subdivision
scheme. Unfortunately, unlike triangles the regular
tetrahedron cannot be constructed from a small num-
ber of regular tetrahedra, which makes both subdivi-
sion and tetrahedron layout non-trivial problems. We
chose to abandon the use of regular tetrahedra and
worked with axis-aligned grids of cubes, with each
cube containing a set of tetrahedra instead. The use
of axis-aligned cubes has advantages in making the
structure easier to understand and implement, as well
as accommodating a reasonable subdivision scheme.
We considered two schemes for A-patch layout
and subdivision based on the axis-aligned cube. The
first method is defined by dividing the cube into five
separate tetrahedron, shown in Figure 7, left. This ar-
rangement results in a cube that is created with a mini-
mum number of A-patches. Unfortunately, in this lay-
out adjacent cubes must be placed in a specific way
such that the faces of each A-patch are shared with
its neighbour otherwise tearing artifacts will appear
when the final result is rendered.
The second method divides the cube into twelve
tetrahedron, outlined in Figure 7, right. This configu-
ration has a couple of advantages, the first being that
the faces of every patch along the face of a cube match
perfectly with the faces of an adjacent cube’s patches,
provided that all the cubes follow the same A-patch
layout. A second advantage is that the tetrahedron
within the cube are of the same size and shape. Fi-
nally unlike the previous method there is no require-
ment for the cubes to be arranged in an octet to guar-
antee that the patch faces match up, which simplifies
the implementation. Unfortunately this method also
yields over twice the number of patches than the 5-
patch cube over the same domain, which slows down
the algorithm by a corresponding amount. Due to the
decrease in the number of A-patch computations we
decided to use the first method in the final implemen-
tation.
5.1 Criteria for Subdivision and
Evaluation
As with the evaluation of two dimensional A-patches
we must determine whether or not the function lies
within the domain. Again, by analyzing the pattern
of the control points in the patch we can infer various
characteristics about it.
A-patches with mixed-sign control points fall un-
der one of three categories, two of which are suitable
for evaluation. The two ideal patches are outlined
by Bajaj (Bajaj and Xu, 1997), which he refers to
as three-sided and four-sided A-patches. Both three
and four-sided A-patches contain a separating layer
of control points similar to that found in the two-
dimensional case, although in this instance the con-
trol points extend in an extra dimension. Three-sided
A-patches contain one vertex control point that has
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
86
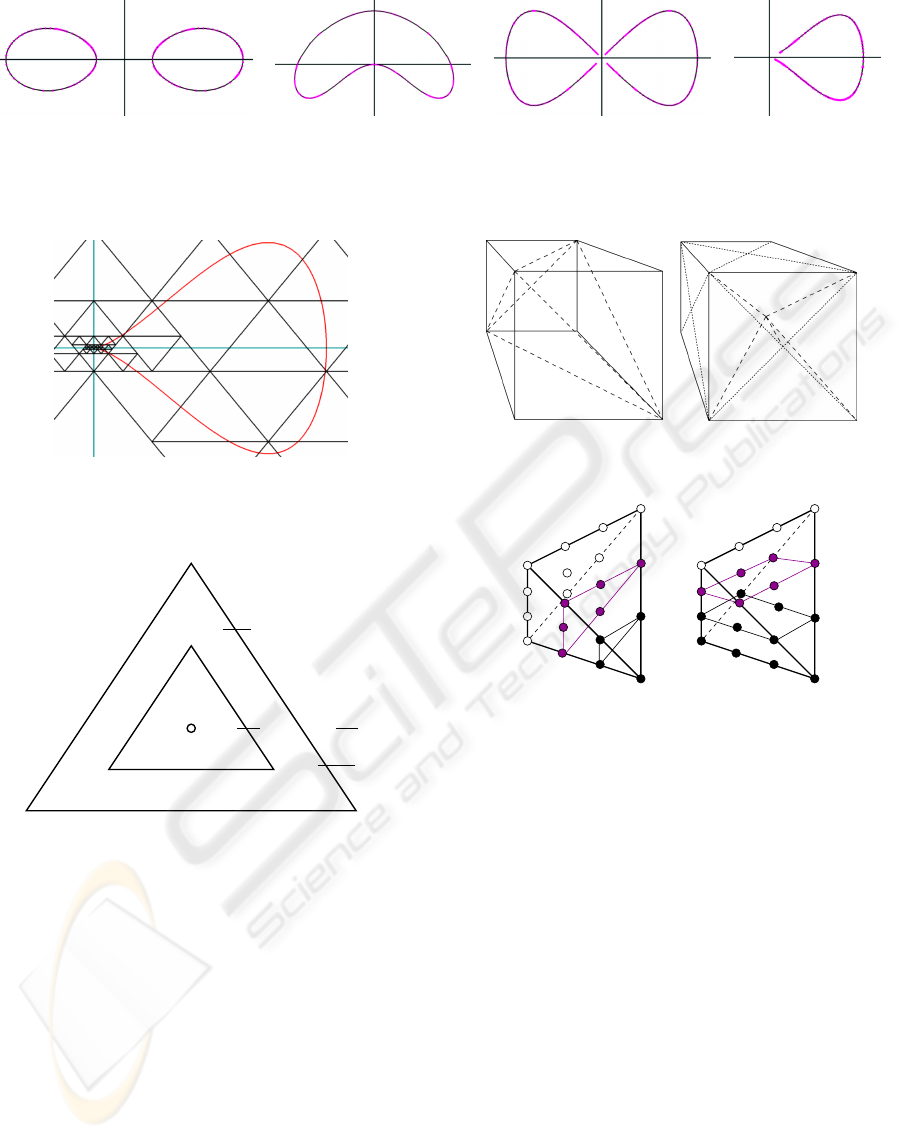
Figure 4: Curve approximations generated by the implementation. From upper left clockwise: x
4
+3x
2
y
2
+2y
4
−2x
2
+3y
2
+
0.2 = 0, x
4
+ 4x
2
y
2
+ 4x
2
y − 3x
2
+ 3y
2
− 4y = 0, x
4
− 2x
2
+ 2y
2
= 0, and 2x
3
− 2x
4
− y
2
= 0. The right two examples show
functions that have areas that cannot be approximated exactly at the point of the singularity.
Figure 5: Subdivision near a singularity.
V
0
V
1
V
2
v
1
v
2
=
1
2(d+1)
V
0
+ ...
v
0
=
d+2
2d+2
V
0
+ ...
C =
1
d+1
V
0
+ ... +
1
d+1
V
d
Figure 6: Variations in curve detail for A-patches containing
the input function.
a different sign than the other three while four-sided
patches contain two pairs of vertex control points that
have different signs from each other. Figure 8 shows
an example of separating layers for three and four-
sided A-patches. Note that three-sided A-patches
contain triangular-shaped surfaces while four-sided
A-patches contain quadrilateral-shaped surfaces.
If all the tetrahedron within a cube have entirely
positive or negative control points and/or passes the
three or four-sided A-patch criteria then it is possible
to approximate the surface that passes through the cu-
bic area using the method outlined in the next section.
Otherwise we subdivide the cube into eight separate
cubes. New Bernstein representations are computed
for the tetrahedrons in the subdivided cubes, and the
Figure 7: A diagram of an axis-aligned cube containing five
and twelve A-patches.
Figure 8: The separating layer of control points in a three
and four-sided A-patch. The white have negative sign; the
black have positive sign; the magenta is the separating layer,
and the coefficients may have either sign.
process is repeated until all the patches are in the de-
sired configuration. This may require multiple levels
of subdivision.
5.2 Tessellating the Surface
Once we have determined which tetrahedron are A-
patches, we can generate a piecewise linear approxi-
mation of the surface. We will use the same method
to determine a zero-set of the implicit function within
the domain of the patch as before, although the
method for evaluating the surface differs between a
three and four-sided patch. The main difference be-
tween the two situations lies in the number of points
to evaluate and the method in which pivoting points
are selected for finding a particular member of the
zero-set.
In the case of a three-sided patch, we know that
F has one sign at three of the corners of the domain
TESSELLATING ALGEBRAIC CURVES AND SURFACES USING A-PATCHES
87
A
C C
A
B
B
D
D
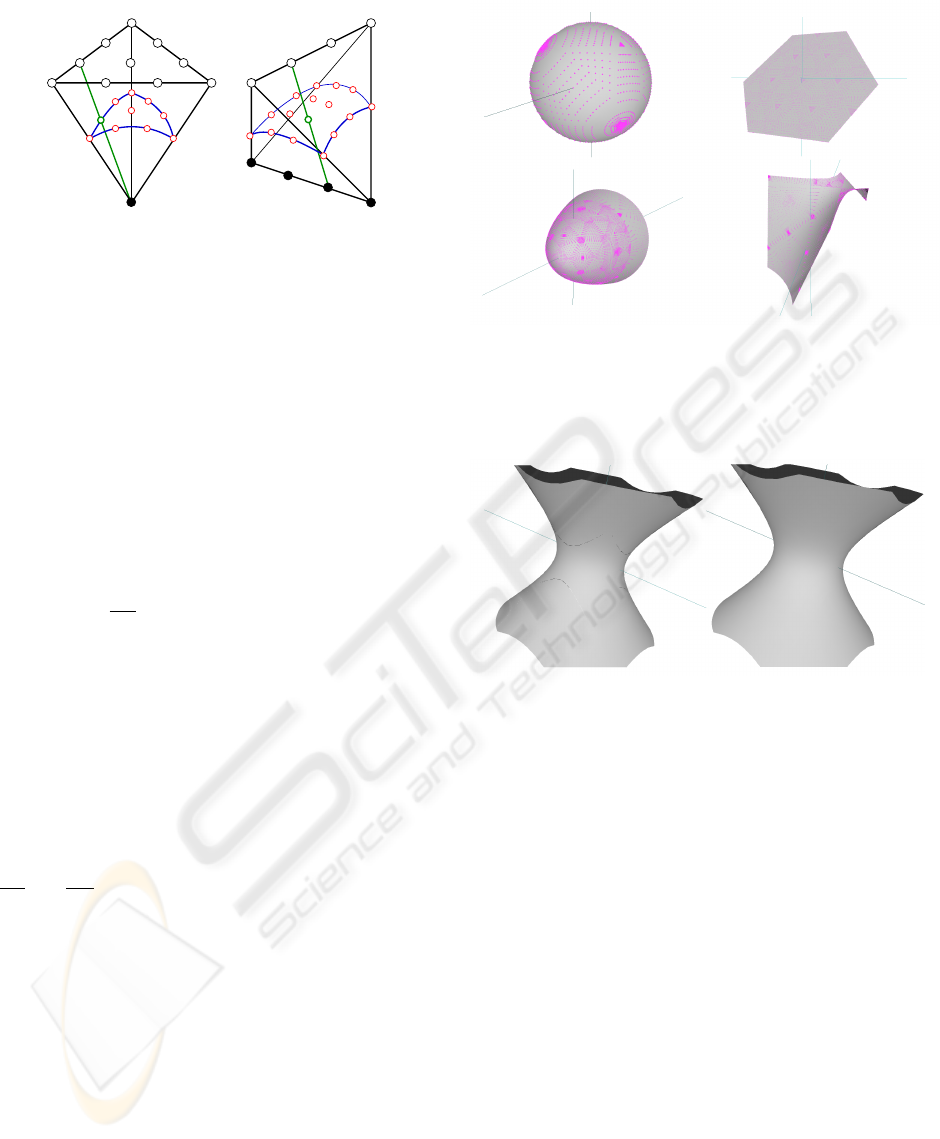
Figure 9: Tessellation of an A-patch: White points form
a triangular grid on a face/edge are of one sign; the black
point(s) has/have opposite sign. Red points are point on the
surface. Each red point is calculated by connecting a white
point to the black point and numerically searching for the
zero. The green line illustrates this for one point, with the
zero on the line being drawn in green rather than red.
tetrahedron T = 4ABCD, and the opposite sign at
the fourth corner. Assume that F has the same sign
at A,B,C. Since we have a separating arrangement of
control points, F has the same sign at all point on the
interior of 4ABC. We setup a triangular grid across
this face, and for each point P on the grid, we con-
struct a line to D. The separating arrangement of co-
efficients ensure that F(P) and F(D) have opposite
signs, and further that there is exactly one zero on the
line segment PD. Again, we find this zero by a nu-
merical search method.
Having found a zero of F corresponding to each
point on the triangular grid on triangle 4ABC, we
connect these zero points in the triangular arrange-
ment suggested by the triangular grid. This forms a
piecewise linear approximation to F over T .
In the four-sided patch case, things differ in that
two corners of T = 4ABCD have one sign (e.g.,
F(A) > 0, F(B) > 0), while the other two corners
have the opposite sign (e.g., F(C) < 0, F(d) < 0).
In this case, we uniformly sample both line segments
AB and CD, and form all connections between sam-
ple points on one edge to the sample points on the
other edge. Along each line segment, there will be
exactly one zero, which can be found with numeri-
cal search. The result will be a rectilinear grid that
approximates F over T . The tessellation algorithm
for both three and four-sided patches is illustrated in
Figure 9. Note that unlike the other figures, in this fig-
ure the points are not representative of A-patch con-
trol points/coefficients, but instead are actual points in
space.
Figure 10 show several surfaces that were approx-
imated using the implementation.
Note that as described, it is possible that the subdi-
vision of adjacent regions will be at different depths,
which can lead to a non-watertight boundary. This in
Figure 10: Planar and quadratic surface tessellations gen-
erated by the implementation. Clockwise from upper left:
x
2
+y
2
+z
2
−0.8 = 0, x+y+z+0.2 = 0, x
2
+y
2
−z −0.8 =
0, and x
2
−y
2
−z −0.8 = 0. Magenta shows the tessellation.
Figure 11: A comparison between a standard and stitched
tessellation.
turn can lead to pixel drop-out. We implemented a
simple stitching scheme to address this problem (Fig-
ure 11) (Luk, 2008).
6 CONCLUSIONS
The A-patch method for approximating implicit
curves and surfaces is a sound one, both in theory and
in practice. The theorems outlined in the Section 3
demonstrate the convergence of the algorithm in do-
mains that do not contain the surface. But although
the theory guarantees that we can eventually decide
the surface does not exist in regions not containing
the surface, so far we have no guarantees that the al-
gorithm will find A-patches for portions of the space
that do not contain singularities. However, our test
cases show the effectiveness of the method in find-
ing a surface approximation in domains that contain
it, strongly suggesting that the method will converge
to A-patches for portions of the surface not near sin-
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
88

Figure 12: Approximating surface singularities to an arbi-
trary precision using A-patches. The orange box identities
an area with a high degree of subdivision.
gularities.
The big advantage of our algorithm is that for al-
gebraics, it avoids certain problems in tessellating im-
plicit surfaces. In particular, over the region of in-
terest, our algorithm is guaranteed not to misclassify
multiple sheets as a single sheet, nor will it miss small
disconnected features. Simplices containing such fea-
tures will not be in A-patch format, and the algorithm
will subdivide the region until the multiple sheets are
separated, the small disconnect components found, or
the maximal subdivision depth is reached (in which
case these regions are flagged as special).
Like a vast majority of the algebraic approxima-
tion methods ours cannot properly identify the singu-
larities of the algebraic surface unless it is coincident
with a vertex control point of an A-patch. However,
even in the worst case the A-patch method is capable
of approximating a singularity point to an arbitrary
distance from the point of singularity via subdivision,
which gives us an unambiguous surface contour to
work on to complete the surface approximation ac-
curately. Figure 12 shows how repeated subdivision
of an algebraic surface with a singularity can gener-
ate an infinitely close approximation of the singularity
without ever finding it.
REFERENCES
Bajaj, C. L., Chen, J., and Xu, G. (1995). Modeling with
cubic a-patches. ACM Transactions on Graphics, Vol-
ume 14, Issue 2, pages 103–133.
Bajaj, C. L. and Ihm, I. (1992). Algebraic surface de-
sign with hermite interpolation. ACM Transactions
on Graphics, Volume 11, Issue 1, pages 61–91.
Bajaj, C. L. and Xu, G. (1997). Spline approximations of
real algebraic surfaces. Journal of Symbolic Compu-
tation, Volume 23, Issue 2-3, pages 315–333.
Bloomenthal, J. (1988). Polygonization of implicit surfaces.
Computer Aided Geometric Design, 5(4):341–355.
B
¨
ohm, W. (1983). Subdividing multivariate splines.
Computer-Aided Design, 15(6):345–352.
Farin, G. (2002). Curves and Surfaces for CAGD. Morgan-
Kauffmann.
Guo, B. (May 1995). Quadric and cubic bitetrahedral
patches. The Visual Computer, Volume 11, Number
5, pages 253–262.
Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3d surface construction algorithm.
Computer Graphics, Volume 21, Number 4, July 1987,
pages 163–169.
Luk, C. (2008). Tessellating algebraic curves and surfaces
using A-Patches. Master’s thesis, University of Wa-
terloo.
Ohtake, Y. and Belyaev, A. G. (December 2002). Dual-
primal mesh optimization for polygonized implicit
surfaces with sharp features. Journal of Computing
and Information Science in Engineering, Volume 2, Is-
sue 4, pages 277–284.
Peters, J. (1994). Evaluation and approximate evaluation of
multivariate bernstein form on a regularly partitioned
simplex. ACM Transactions on Mathematical Soft-
ware, 20(4):460–480.
Sederberg, T. W. (1985). Piecewise algebraic surface
patches. Computer Aided Geometric Design, Volume
2, Issues 1-3, pages 53–59.
Sederberg, T. W. and Anderson, D. (1985). Steiner surface
patches. Computer Graphics and Applications, IEEE,
Volume 5, Issue 5, pages 23–36.
Wang, J., Oliveira, M. M., and Kaufman, A. E. (2005).
Reconstructing manifold and non-manifold surfaces
from point clouds. 16th IEEE Visualization 2005 (VIS
2005), page 53.
Wyvill, B., Jepp, P., van Overveld, K., and Wyvill, G.
(2000). Subdivision surfaces for fast approximate im-
plicit polygonization.
TESSELLATING ALGEBRAIC CURVES AND SURFACES USING A-PATCHES
89
