
TOWARDS REAL-TIME AND ACCURATE VOXEL COLORING
FRAMEWORK
Oussama Moslah, Arnaud Debeugny, Vincent Guitteny, Serge Couvet
THALES Security Solutions and Services, 1 Rue du General de Gaulle, 95523 Cergy-Pontoise, France
Sylvie Philipp-Foliguet
ETIS - UMR CNRS 8051, ENSEA, 6 Avenue du Ponceau, 95014 Cergy-Pontoise, France
Keywords:
Voxel coloring, Visual hull, Marching cubes, Octree, GPGPU.
Abstract:
This paper presents algorithms and techniques towards a real-time and accurate Voxel Coloring framework.
We combine Visual Hull, Voxel Coloring and Marching Cubes techniques to derive an accurate 3D model
from a set of calibrated photographs. First, we adapted the Visual Hull algorithm for the computation of the
bounding box from image silhouettes. Then, we improved the accuracy of the Voxel Coloring algorithm using
both colorimetric and geometric citerions. The calculation time is reduced using an Octree data structure.
Then, the Marching Cubes is used to obtain a polygonal mesh from the voxel reconstruction. Finally, we
propose a practical way to speed up the whole process using graphics hardware capababilities.
1 INTRODUCTION
In this paper we address the problem of real-time
3D reconstruction from photographs. Our frame-
work consists of three parts: (1) computation of the
bounding box of the object we want to reconstruct us-
ing a Visual Hull approach, (2) a voxel reconstruc-
tion based on both colorimetric and geometric crite-
rions (3) and a generation of a polygonal mesh us-
ing Marching Cubes techniques. The context of this
work is the growing interest in automatic reconstruc-
tion techniques from photographs. With the increas-
ing capababilities of modern graphics hardware 3D
reconstruction techniques can be accelerated to obtain
accurate models in real-time.
2 RELATED WORK
The original Voxel Coloring paper described in (Seitz
and Dyer, 1997) uses only colorimetric criterions to
reconstruct an object consistent with the input images.
This algorithm starts by discretizing the 3D space into
voxels and projects them on each image. The voxels
that are consistent from a colorimetric viewpoint with
the images are retained. The complexity of this algo-
rithm is O(N
3
∗ n) with N
3
is the number of voxels
and n the number of images. In order to improve the
accuracy of this method we use both colorimetric and
geometric criterions to derive 3D models from image
silhouettes. The calculation time is improved using
an Octree data structure. The Visual Hull algorihm
(Franco and Boyer, 2003) operates in a different man-
ner by projecting the image silhouettes into the 3D
space. The intersection of the silhouettes cones pro-
duces the 3D polygonal model. We adapted this algo-
rithm to compute the bounding box of the 3D object
which is needed for the voxel reconstruction. Instead
of projecting the image silhouettes into the 3D space
we project their 2D bounding boxes. The Marching
Cubes technique (Lorensen and Cline, 1987; F. Goetz,
2005) takes as input a 3D point cloud and produces a
textured polygonal mesh. Acceleration using graphics
hardware has been for a long time restricted to purely
graphical processing. With the constant evolution of
graphics hardware and the emerging GPGPU (Gen-
eral Purpose GPU) techniques and technologies such
Cg (W. R. Mark, 2003) and CUDA (Cuda, 2008) re-
searchers start to re-design their algorithms to bene-
fit from the parallel capababilities of modern GPUs
(Trendall and Steward, 2000; Krueger and Wester-
mann, 2003; F. Goetz, 2005).
490
Moslah O., Debeugny A., Guitteny V., Couvet S. and Philipp-Foliguet S. (2009).
TOWARDS REAL-TIME AND ACCURATE VOXEL COLORING FRAMEWORK.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 490-495
DOI: 10.5220/0001794704900495
Copyright
c
SciTePress
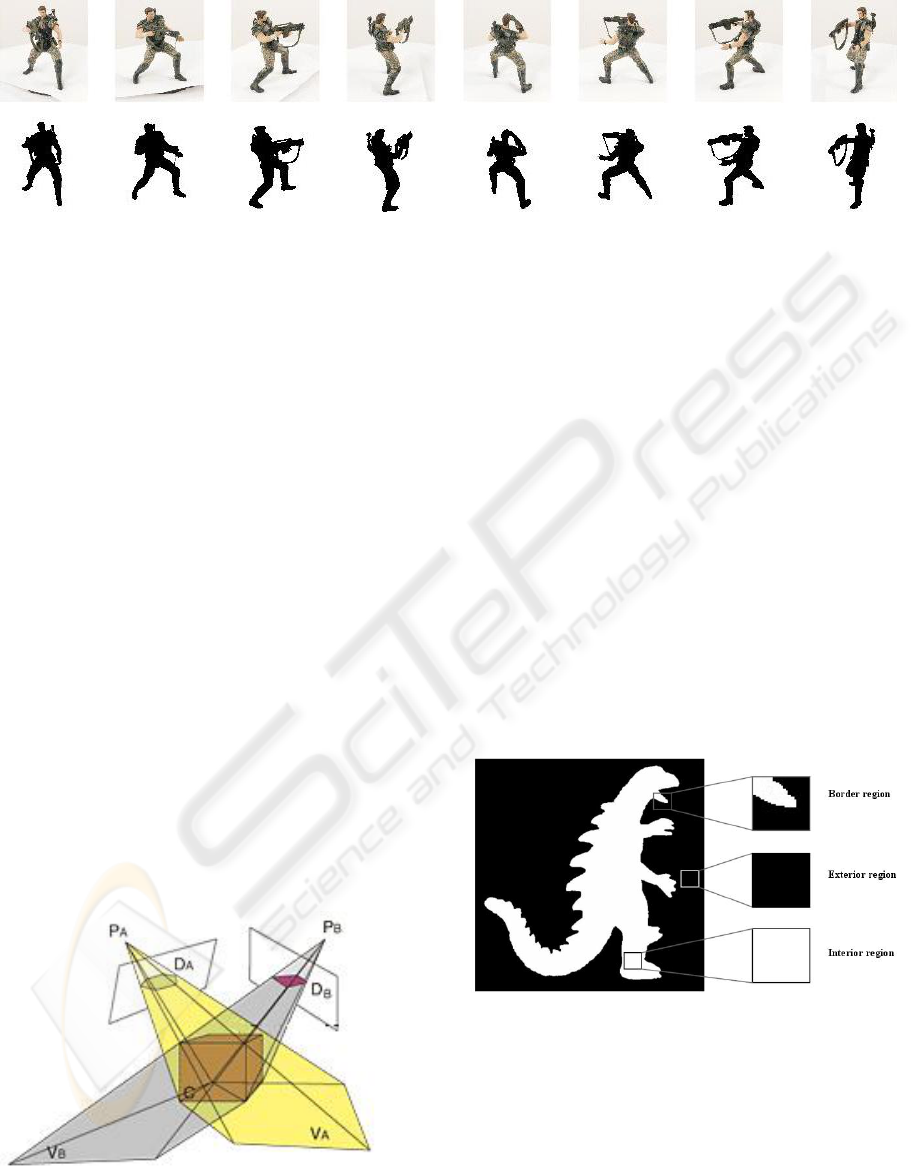
Figure 1: A sample data set: Our system takes as input a set of calibrated images and silhouettes and produces a textured
polygonal model (VGG, 2008).
3 OUR APPROACH
Given a set of calibrated images and silhouettes our
system produces a textured polygonal model. Figure
1 illustrates a sample input data set used for evaluating
our reconstruction pipeline. The proposed solution
described consists of three parts. First we compute the
bounding box of the object we want to reconstruct us-
ing a Visual Hull approach. Then we reconstruct the
3D object with a colorimetric and geometric consis-
tency based Voxel Coloring scheme. finally, we pro-
duce a textured polygonal model using The Marching
Cubes technique. The Voxel Coloring algorithm is ac-
celerated using graphics hardware.
3.1 Visual Hull
The Visual Hull algorihm (Franco and Boyer, 2003)
computes a 3D coarse representation of an object
from it’s 2D projections in a set of images. Figure
2 illustrates this algorithm in the simple case of 2 cal-
ibrated images. Given (1) two projection matrices P
A
and P
B
(2) two 2D regions D
A
and D
B
representing
the projection of the same 3D object we compute the
3D cones V
A
and V
B
and intersect them to compute the
coarse 3D model C.
Figure 2: Illustration of the Visual Hull principle.
We adapted this algorithm to compute the bounding
box of the 3D object which is needed for the voxel re-
construction. Instead of projecting the image silhou-
ettes into the 3D space we project their 2D bounding
boxes.
3.2 Voxel Coloring
The Voxel Coloring algorithm described in (Seitz and
Dyer, 1997) uses a colorimetric criterion to decide if
a voxel is consistent or not. Thus voxels can be col-
orized even if their projection is totally outside of the
object silhouette. In order to improve the accuracy
of the Voxel Coloring algorithm we add a geomet-
ric criterion (Kuzu and Rodehorst, 2001). Figure 3
illustrates the principle of the use of silhouettes: vox-
els are identified respectively as gray, black or white
depending if their projection into images falls in the
boundary, outside or inside of the silhouettes.
Figure 3: Illustration of the geometric consistency check.
To reduce the complexity of the algorithm we use an
Octree data structure (A. W. Fitgibbon, 1998). We
recursively subdivide the volume into 8 subvolumes.
The subdivision of a volume is made only if it’s pro-
jection into images is on the boundary of the silhou-
ette. Thus the object is reconstructed in an economic
way. Figure 4 shows an illustration of a volume sub-
division and it’s associated data structure.
TOWARDS REAL-TIME AND ACCURATE VOXEL COLORING FRAMEWORK
491
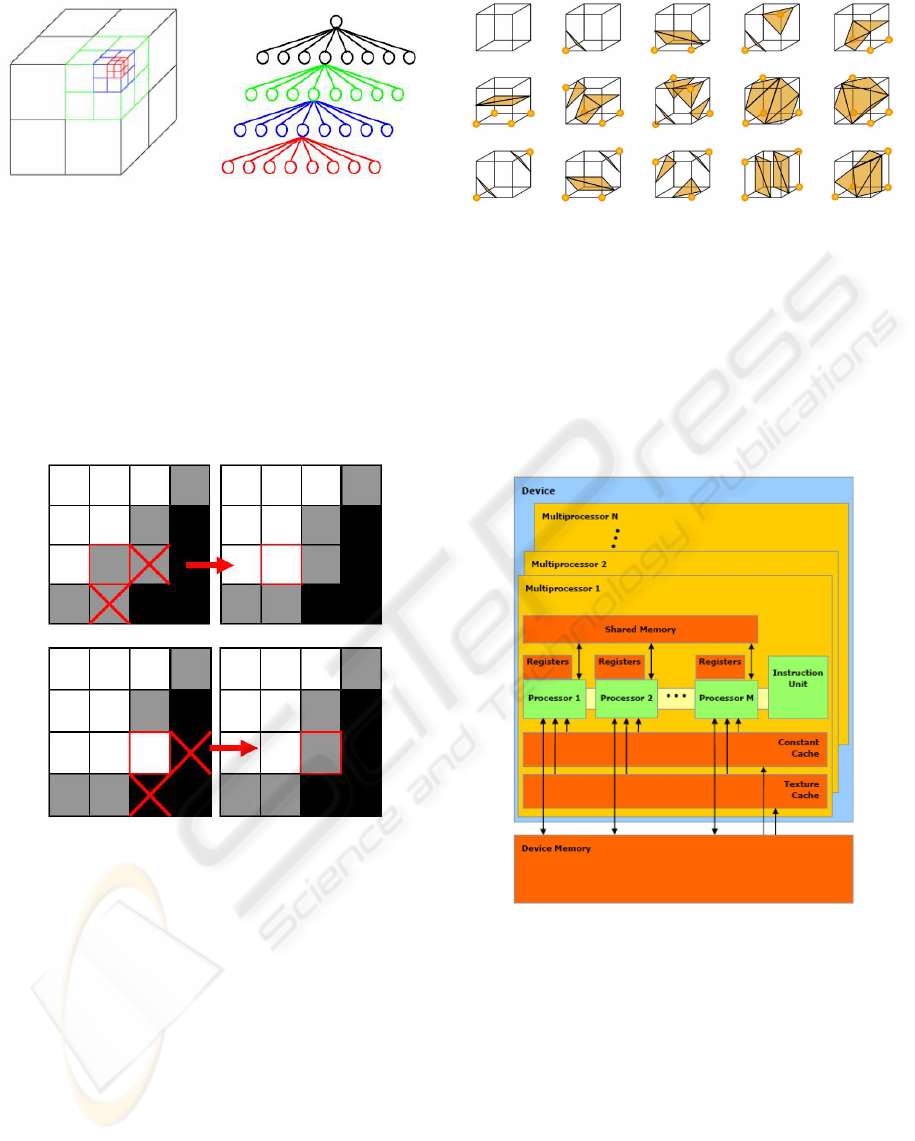
Figure 4: Recursive subdivision of a volume and the asso-
ciated octree.
We also use a 3D connexity check to improve the sur-
face of the voxel reconstruction. We proceed as fol-
lows to update the voxel classification: (1) we check
the 6 neighbours of each gray voxel and if no black
voxel is found we identify it as white, (2) we also
check the neighbourhood of each white voxel and if
at least one black voxel is found we identify it as gray.
Figure 5 illustrates the principle of this algorithm.
Figure 5: Illustration of the voxels connexity check.
3.3 Marching Cubes
The Marching cubes algorithm (Lorensen and Cline,
1987) is used to obtain a polygonal model from a scat-
tered set of voxels. The algorithm starts by taking
eight neighbor locations to construct a cube, then de-
termine the polygons that passes through this cube.
The individual polygons are then fused into the model
surface. We use an index of precalculated array of 256
possible polygon configurations (2
8
= 256) within the
cube. This array of 256 cube configurations is ob-
tained by reflections and symmetrical rotations of the
basic cases illustrated by Figure 6.
Figure 6: 15 basic configurations of polygons.
3.4 Acceleration using Graphics
Hardware
The GPU architecture is specialized for parallel com-
puting tasks. The graphics hardware consists of a set
of processors grouped together in a common multi-
processors block. Figure 7 illustrates the hierarchy of
the parallel architecture of actual GPUs.
Figure 7: Graphics hardware parallel architecture.
For example the device used in this work is the NVidia
GeForce 8800GTS card. This card mainly consists
of 12 multiprocessors and a 512 MB device mem-
ory. Each multiprocessor is composed itself by 16
processors, a shared memory and an instruction unit.
This card can thus make 192 calculations in paral-
lel. Unlike the device memory the shared memory
consists of 16 Kb and is accessible only by proces-
sors belonging to the same multiprocessor unit. How-
ever this memory is very usefull and can be accessible
much more faster than the device memory. To exe-
cute hundreds of processes working in various pro-
grams, multi-processors use new architecture called
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
492

(a) (b) (c) (d)
Figure 8: Reconstruction results for three different level of details (64 = 2
6
, 128 = 2
7
, 256 = 2
8
) (a,c) Calculation using the
CPU (b,d) Calculation using the GPU.
SIMT (Single Instruction Multiple Thread).
The Voxel Coloring process is accelerated using the
parallel capabilities of modern graphics hardware.
Unlike the original Voxel Coloring algorithm (Seitz
and Dyer, 1997) we use an Octree data structure
(Szelinski, 1993). First, each volume is subdivided
into 8 subvolumes. This gives rise to 27 points (we
remove redundant 3D points). The projection is made
using the well known pinhole camera model (Zisser-
mann and Hartley, 2003) that describes how a 3D
point M with coordinates (X, Y , Z) in the world co-
ordinate space projects into an image point m with
coordinates (u,v) in pixels using the classic perspec-
tive transformation:
m
∼
=
K
R
T
| − R
T
t
M = PM (1)
Where R and t respectively represent the camera ori-
entation and position, K the camera matrix or matrix
of intrinsic parameters and P the projection matrix. In
order to optimize the use of parallel architecture of the
graphics hardware we assign a different process for
image point coordinate computation using the simple
formula:
m[p + 27n] =
3
∑
k=0
P[4n + 12i + k] ∗ M[4p + k] (2)
Where m, P and M respectively represent the concate-
nated matrices of 2D image points, projection ma-
trices and 3D points. Then the result is normalized
and we obtain 27 points in homogenous coordinates
(u,v,1) for each image using the formula :
m[p + 27n] =
m[p + 27n]
m[p + 54]
(3)
Finally, a subvolume can be recursively subdivided if
the projection into images falls in the boundary of the
silhouette. Thus we get better level of details without
the need of subdividing all the voxels.
4 RESULTS
Figure 8 illustrates the final results obtained with our
Voxel Coloring framework for different level of de-
tails. The level of detail correspond to the depth of the
Octree data structure. It is the maximum number of
recursive subdivision of a voxel. Figure 9 shows the
reconstruction results of the Dinosaur and the Soldier
for the maximum level of detail. Evaluation of the re-
sults and the computing times of our framework are
presented in Table 1.
5 DISCUSSION
Comparison to Previous Work. Most previous work
on reconstruction techniques from image silhouettes
using Voxel Coloring algorithm either use geometric
or colorimetric approach. In our work we combine
those two criterions to get an accurate reconstruc-
tion. We also use an Octree data structure to improve
the computing times and propose a way to accelerate
the algorithm using parallel processing capabilities of
modern GPUs.
Robustness and Limitations. The robustness of our
approach strongly depends on the quality of silhou-
ettes. Actually only the Voxel Coloring algorithm is
accelerated using the GPU. Thus our framework is a
mixed CPU/GPU implementation.
Future Work. We are working on the implementa-
tion of the Marching Cubes and the Visual Hull al-
gorithms using the GPU and we expect to get real-
time computing times for the whole process. We are
also working on photorealistic rendering of the recon-
structed model using view-dependent texture map-
ping techniques (P. E. Debevec, 1996).
6 CONCLUSIONS
This paper introduced methods and techniques for
real-time recovering of accurate textured 3D models
TOWARDS REAL-TIME AND ACCURATE VOXEL COLORING FRAMEWORK
493
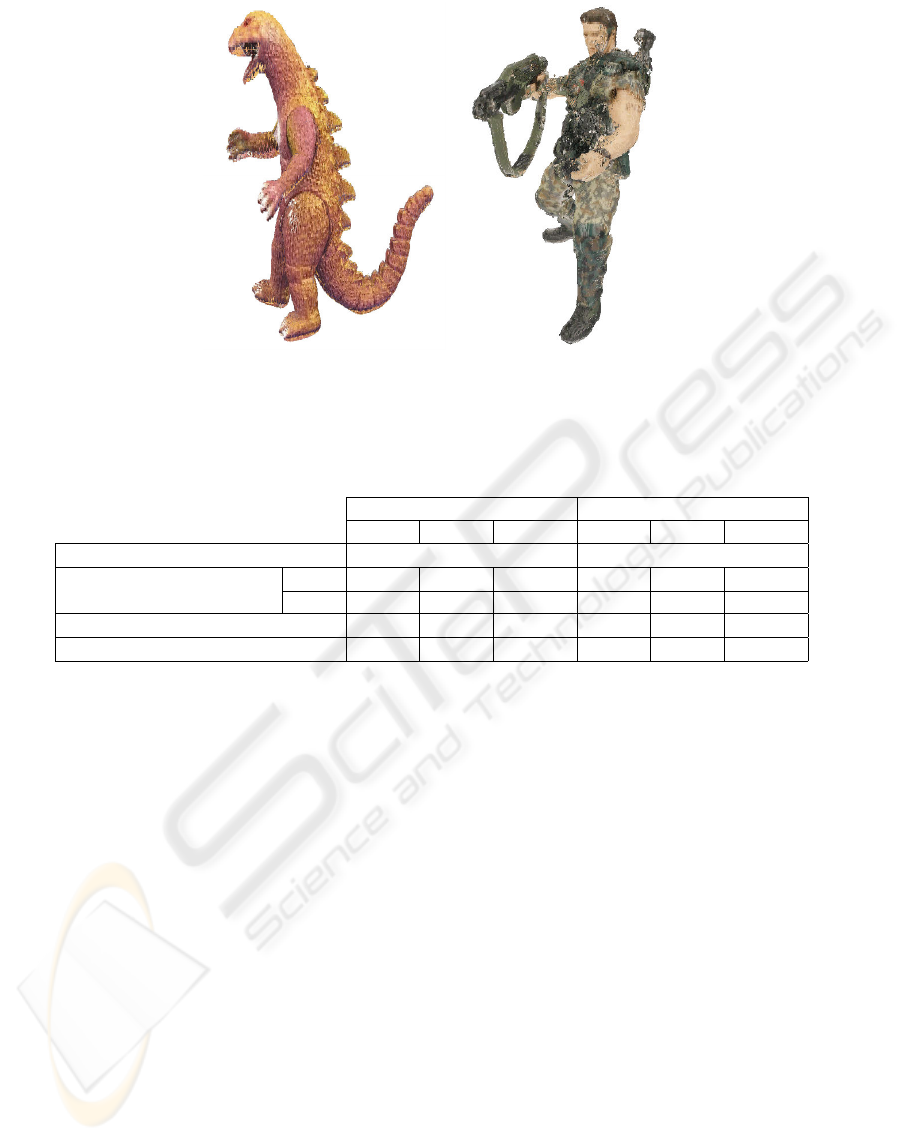
(a) (b)
Figure 9: Results using the highest level of detail (256 = 2
8
). (a) the Dinosaur reconstructed (b) the Soldier reconstructed.
Table 1: Evaluation results of our Voxel Coloring framework using the Nvidia card 8800GTS 512MB on a Dualcore Intel
Pentium 4 3.2Ghz with 2GB RAM.
Dinosaur Soldier
64 128 256 64 128 256
Visual Hull (seconds) 0.442 3.703
Voxel Coloring (seconds) CPU 92.4 518 5449 56.47 200 1614
GPU 1.50 3.25 16.44 0.79 1.98 8.33
Marching Cubes (seconds) 2.37 12.49 97.16 3.13 13.56 90.34
Mesh (number of triangles) 18736 73672 308956 24020 93652 392468
from image silhouettes. The main contributions of
this work is the way we compute the bounding box
using a Visual Hull approach, the combined colori-
metric and geometric criterions used inside the Voxel
Coloring algorithm and the way the computations are
accelerated using the parallel capabilities of modern
GPUs.
7 ACKNOWLEDGEMENTS
We wish to acknowledge the Cap Digital Business
Cluster Terra Numerica project for sponsoring the re-
search reported in this paper.
REFERENCES
A. W. Fitgibbon, G. Cross, A. Z. (1998). Automatic 3d
model construction for turn-tables sequences. Lec-
tures notes in Computer Sciences.
Cuda (2008). Cuda: Compute unified device architecture,
www.nvidia.com/cuda. NVidia.
F. Goetz, T. Junklewitz, G. D. (2005). Real-time marching
cubes on the vertex shader. In Eurographics.
Franco, J. and Boyer, E. (2003). Exact polyhedral vi-
sual hull. In British Machine Vision Conference
(BMVC’03), volume I, pages 329–338.
Krueger, J. and Westermann, R. (2003). Acceleration tech-
niques for gpu-based voluume rendering. In IEEE Vi-
sualization’03.
Kuzu, Y. and Rodehorst, V. (2001). Volumetric modeling
using shape from silhouette, photogrammetry and car-
tography.
Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3d surface construction algorithm.
In SIGGRAPH’97.
P. E. Debevec, C. J. Taylor, J. M. (1996). Modeling
and rendering architecture from photographs: a hy-
brid geometry- and image-based approach. In SIG-
GRAPH’96.
Seitz, S. M. and Dyer, C. R. (1997). Photorealistic scene
reconstruction by voxel coloring. In Computer Vision
and Pattern Recognition Conf., pages 1067–1073.
Szelinski, R. (1993). Rapid octree construction from images
sequences. In CVGIP, pages 23–32.
Trendall, C. and Steward, A. J. (2000). General calculation
using graphics hardware, with application to interac-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
494

tive caustics. In Eurographics Workshop on Render-
ing, pages 287–298. Springer.
VGG (2008). Visual geometry group dataset.
www.robots.ox.ac.uk/˜vgg/data/data-mview.html.
W. R. Mark, R. S. Glanville, K. A. M. K. (2003). Cg: A
system for programming graphics hardware in a c-like
language. In Proceedings of SIGGRAPH.
Zissermann, A. and Hartley, R. (2003). Multiple View Ge-
ometry in Computer Vision. Cambridge University
press, 2nd edition.
TOWARDS REAL-TIME AND ACCURATE VOXEL COLORING FRAMEWORK
495
