
COORDINATION OF SELF-OPTIMIZING MECHATRONIC
SYSTEMS
A New Application for Multi-Agent Planning
Benjamin Kl
¨
opper and Wilhelm Dangelmaier
Heinz Nixdorf Instiute, University of Paderborn, F
¨
urstenallee 11, Paderborn, Germany
Keywords:
Self-optimization, Mechatronics, Multi-agent systems, Planning and coordination.
Abstract:
The paradigm of self-optimization introduces flexible and highly adaptive mechatronic systems. During the
exploiation of this flexibility, new problems arise. One of these problems is the coordination of mechatronics
systems and subsystems. This paper introduces the application area self-optimizing mechatronic systems and
identifies the arising coordination problems. Two main scenarios are identified: coordination of autonomous
mechatronic systems and coordination of several subsystems within an autonomous mechatronic system. We
will show that multi-agent technology and in particular multi-agent planning can be applied to solve both
coordination scenarios.
1 INTRODUCTION
Technical systems and machines are designed to ful-
fill tasks for humans. Technological progress continu-
ously extends the spectrum of tasks and improves the
quality of tasks fulfillment. The quality of tasks full-
fillment can be measured in various dimensions, de-
pending on the current area of application. Examples
for such dimensions are: timeliness, resource con-
sumption, processing accuracy (e.g. in case of ma-
chining tools), or comfort and driving pleasure (in
case of vehicles). Mechatronic systems are a rel-
atively new class of technical systems. The term
mechatronics refers to the close integration of elec-
tromechanical systems, electronic and information
technology (Bradley, 1997).
Further advancement in information and commu-
nication technology enables systems to adapt their be-
havior to changing environmental settings and user
preferences. We use the term self-optimization to
characterize such systems. Self-optimizing systems
(Gausemeier et al., 2008) are able to adapt their objec-
tives autonomously. This includes modifying the rel-
ative weighting or ranking of the objectives. Adapt-
ing the objectives results in an adaptation of the sys-
tem behavior. To determine the suitable adaption of
the system behavior, the objectives are used to formu-
late corresponding optimization problems. Their so-
lutions problems indicate the suitable behavior adap-
tations. The adaptations are realized by adapting pa-
rameters (e.g. changing a control parameter) or the
structure of the system (e.g. replacing the current con-
troller).
We understand self-optimization as an iterative se-
quence of three actions:
1. Situation-Analysis – includes the state of the sys-
tem and observations about its environment.
2. Determining the system of objectives.
3. Adapting the system behavior according to the
new objectives.
In this paper we will explore two main theses re-
garding self-optimizing mechatronic systems:
1. Planning extends the steps of self-optimization to
futures states and helps to implement autonomous
determination of objectives
2. The structure of mechatronic systems requires
multi-agent planning
The paper is structured as followed: First it intro-
duces mechatronic systems and their structure in more
details. Then, the following section explains how
planning can be used to implement the determination
of objectives. From classical planning we proceed to
multi-agent planning and show that this discipline has
great potential within the context of self-optimizing
mechatronic systems. Finally we will conclude with
example that illustrates this new application area.
312
Klöpper B. and Dangelmaier W. (2009).
COORDINATION OF SELF-OPTIMIZING MECHATRONIC SYSTEMS - A New Application for Multi-Agent Planning.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 312-317
DOI: 10.5220/0001794903120317
Copyright
c
SciTePress

2 STRUCTURING OF
MECHATRONIC SYSTEMS
Figure 1 shows an proposal for a hierarchical structur-
ing for mechatronic systems ((VDI), 2004). Mecha-
tronic Function Modules (MFM) are on the lowest
level of the hierarchy. MFM are the elementary type
of mechatronic systems and consist of a mechanic
structure, actuating elements and sensors. The sen-
sors provide information about the environment and
the system for a superimposed information process-
ing, which controls the actuating elements. On the
next level autonomous mechatronic systems (AMS)
integrate several function modules. AMS and MFM
interact by exchange of information. Finally, several
AMS can establish networked mechatronic systems
(NMS). The structuring shows versatile relationships
between mechatronic systems by information, energy
and material flow. These relationships and interac-
tions require coordination.
Figure 1: Structure of a complex mechatronic system.
3 PLANNING FOR
SELF-OPTIMIZATION
Planning in Artificial Intelligence refers to the task
of finding a sequence of actions which lead from a
given initial state to a desired goal state (Russell and
Norvig, 2003). Planning languages are used to for-
malize this problem and enable the algorithmic so-
lution. Planning languages usually consist of two
main elements: state representation and action rep-
resentation. While the states represent snapshots of
the world, actions define the dynamic component of
the planning problem. An action defines which ac-
tivities are applicable in a given state (via precondi-
tion) and which consequences arise from this activ-
ity (via effects). During the last years, the Planning
Domain Definition Language (PDDL) (Gerevini and
Long, 2005) established a de facto standard in aca-
demic research.
In the context of self-optimization planning can
be interpreted in a different way. For each action plan-
ning locally determines (on a time line) the objectives.
Since the planning procedure builds a complete se-
quence of activitivies, this local system of objectives
is coherent with future steps and situations in the plan.
Thus, planning is a powerful mechanism in the con-
text of self-optimization.
To use this powerful mechanism, the planning
models from artificial intelligence must be mapped
onto the abilities and behaviors of mechatronic sys-
tems. Thus, the next section introduces a classical
methodology for the design of mechatronic systems.
Subsequently, the central modeling elements of the
methodology are mapped onto the planning of artifi-
cial intelligence.
3.1 Classic Design of Mechatronic
Systems
A technical system fulfills its tasks by the implemen-
tation of a behavior. During the design of a mecha-
tronic system the behavior is usually modeled as a
black box. The transformation of incoming informa-
tion, energy and material flow into outgoing flows is
focussed. The system’s designer defines a function
hierarchy and splits the main tasks into sub-functions
until a sufficient amount of details is achieved (Pahl
and Beitz, 07). According to the definition of the
function hierarchy, the subfunctions are examined for
relationships, dependencies and conflicts. The de-
signer searches for a feasible sequence of subfunc-
tions to implement the desired behavior. This se-
quence may contain loops and branches. Finally, the
designer identifies possible implementations and so-
lutions of the subfunctions.
3.2 Planning Models for
Self-Optimizing Mechatronic
Systems
Self-optimizing mechatronic systems are able to
adapt their behavior to the current operation condi-
tion and varying external preferences (e.g. defined by
a user or surrounding systems) regarding the possible
quality dimensions of their behavior. For this purpose,
these mechatronic systems feature several implemen-
tations of their sub-functions. We refer to these im-
plementations as operation modes.
To achieve maximum flexibility and adaptability
COORDINATION OF SELF-OPTIMIZING MECHATRONIC SYSTEMS - A New Application for Multi-Agent Planning
313
the mechatronic systems must be able to identify the
sequence of operation modes that provides the best
quality regarding the current external objective and
the current environmental influences. This problem
leads directly to the planning problem in artificial in-
telligence.
If the operation modes of a mechatronic system
are mapped onto the action definition of a planning
language, artificial intelligence planning can be ap-
plied to determine the currently best sequence of op-
eration for a given overall task. An example for such
a task is the transportation of a passenger from a start
station to a destination station by a railway vehicle.
The initial state is the current position of the vehicle,
the goal state is the passenger at his destination. Pos-
sible quality dimension or objectives are travel time,
comfort and energy consumption. The vehicle’s ac-
tive suspension may feature different combinations of
comfort and energy consumption for certain environ-
mental circumstances (e.g. track conditions). The fol-
lowing listing shows an action definition for a driving
on track section with an active suspension:
(:action drive
:parameters
(?v vehicle ?l1 ?12 - location)
:precondition
(and at ?r ?l1)
(>=(energy_storage ?v)
(*distance ?l1 ?l2)
(suspension-active ?v)
:effect
(and (not (at ?v ?l1))
(at r? ?l2)
(increase (total-energy-used)
(*(distance ?l1 ?l2)
(suspension active ?v)))
(decrease (energy_storage ?v)
(*(distance ?l1 ?l2)
(suspension-active *v)))
)
The precondition of the action assures that the ve-
hicle has sufficient energy to travel between the two
locations l1 and l2. In the effects the vehicle moves
from its origin l1 to l2 and the state of charge of the
energy storage is reduced by the energy consumption
of travelling the distance between l1 and l2 with acti-
vated suspension.
Beside fundamentally different implementations
of sub-functions (e.g. active and passive suspension)
the activities can also differ just in certain parame-
ters (e.g. operating pressures). To select appropriate
parameter settings to define actions is difficult. Fig-
ure 2 shows a possible systematic approach to deter-
mine reasonable operation modes. The first steps in
the definition of operation mode is the selection of
characteristic environmental influences and a reason-
able configuration of objectives (e.g. weighting of en-
ergy consumption vs. comfort). The environmental
influences will be part of the precondition of the ac-
tions while the objectives configuration label the ac-
tions. An optimization (e.g. (Witting et al., 2008) is
used to determine continuous parameters of the sys-
tem behavior and to provide information on how good
the objectives can be achieved under the character-
istic environmental influences and with the predeter-
mined weightings. Optimal control (Kirk, 1970) even
offers a way to predetermine optimal continous state
trajectories regarding a cost functions. During oper-
ations the expected environmental influences must be
mapped to a characteristic influence from optimiza-
tion to determine the effects of an action. This prob-
lem is a classification problem.
Objective
Configuration
Characteristical
environmental
influences
Action Precondition
Operation modes /
Actions
Optimization
Action Effects
Current
environmental
influences
Classification
Action with
Current Effects
Run Time Design Time
Figure 2: Action Definition by Offline Optimization.
4 MULTI-AGENT PLANNING
FOR SELF-OPTIMIZATION
The structuring of mechatronic systems clearly shows
that mechatronic systems do not act isolated in their
environment. Instead, there are various interactions
and interdependencies. Thus, the activities and the
planning of mechatronic systems have to be coordi-
nated. Witteveen et. al. define multi-agent plan-
ning as the combination of planning and coordination
(Weerdt et al., 2005).
Multi-agent systems (MAS) and agent based sys-
tems are recognized as a new approach to the control
and coordination of mechatronic systems (cf. (Baum
et al., 2002; Al-Safi and Vyatkin, 2007)). Anyhow,
multi-agent planning is rarely used in mechatronics
today.
In the context of mechatronic systems two funda-
mentally different application scenarios can be distin-
guished:
1. Multi-agent planning for autonomous mecha-
tronic systems
2. Multi-agent planning for function modules within
an autonomous mechatronic systems
ICAART 2009 - International Conference on Agents and Artificial Intelligence
314

4.1 Multi-agent Planning for AMS
Each autonomous mechatronic system possesses an
individual system of objectives. Thus, they act self-
ishly and cooperation is an instrument to improve
their local plan quality. In the context of self-
optimizing mechatronics we distinguish three types of
cooperative actions. In job swapping an AMS trans-
fers a job (e.g. a transport job or machining work-
piece) to another AMS, which is more suitable. Rea-
sons may be the abilities of the systems or their cur-
rent local plans. For instance, a machining center of-
fers better processing accuracy or a vehicle already
passes the start and destination of a transport job.
AMS may also outsource operations. This coopera-
tion action requires extenisve coordination. The plan-
ning system has to embed an externally executed op-
eration into its current local plan. Thus, timing is cru-
cial. The third coordination activity is the alignment
of activities. The alignment of activities changes the
cost-benefit ratio of an activity. Mainly, the alignment
of activities refers to a chronological rearrangement
of activities or a change of the activity’s subject (e.g.
a workpiece). For example such rearrangements help
to avoid set-up cost.
To realize these cooperation actions during the
planning process, a phase model according the
Wooldridge and Jennings (Wooldridge and Jennings,
1998) seems suitable: Recognize cooperation poten-
tial,team formation, plan formation, and team action.
To recognize possible cooperation action, these
actions have to be integrated into the local planning
problem of the AMS. In case of the exchange of jobs
the integration is straight forward. The systems can
compare the quality of a plan with and without a job.
Data clustering can be used to select candidate jobs.
Under the assumption that jobs which differ largely
from the other job cause large costs, small clusters
apart from the residual data set are good candidates.
The external execution of sub-functions is just a spe-
cial type of sub-function. They can be integrated with
expected cost-benefit ration in the local planning pro-
cess. Conditional actions can model the alignment
of activities, with special effects for aligned and un-
aligned actions.
Multi-agent technology offers various methods
to implement team formation and plan formation.
Matchmaking mechanisms like middle agents (Sycara
et al., 1997) or distributed matchmaking (Ogston and
Vassiliadis, 2002) can identify possible cooperation
partners. Negotiations (Faratin et al., 1998), auctions
(David et al., 2002) and voting (Conitzer, 2008) can
be used to provide an agreement about joined plans
and compensations.
4.2 Multi-agent Planning for Function
Modules
The coordination of function modules differs largely
from the coordination of AMSs. The composition of
the systems is already known, no method for the iden-
tification of cooperation partners is required. Further-
more all function modules are committed to the sys-
tem of objectives of the AMS. Thus, the purpose of
the coordination of function modules is to achieve a
behavior that optimizes the system of objectives of
the overall system.
For this problem, centralized planning could be a
feasible approach. However, this approach has sev-
eral disadvantages. First, the definition of complex
centralized planning models is more time-consuming
than the definition lean localized planning models.
Secondly, the centralized approach is less flexible.
Every change in the composition of the function mod-
ules requires a redesign of the planning models. Fi-
nally, the paradigm of divide-and-conquer offers bet-
ter performance. In distributed planning, paralleliza-
tion speeds-up the processing and splitting up a cen-
tralized planning problem into several smaller local
problems reduces the complexity. For an example, we
consider a system with two function modules. Each
function module can carry out different modes of op-
erations. In a decentralized formulation two state-
action trees with 2
d
nodes can be constructed. In a
centralized 4
d
state-action combinations have to be
considered. The better performance of localized and
distributed planning has to be balanced with the coor-
dination efforts.
In (Kl
¨
opper et al., 2008a) we introduced a for-
mal framework, which enables the function mod-
ules to consider the social consequences of their
activities. The basic model element in this for-
mal framework are conditional evaluation functions:
eval
ω
∆
(om
f m
|om
0
f m
0
, e) defines how good an operation
mode of function module f m achieves an objective
ω under the environmental influences e if function
module f m
0
carries out an operation mode om’. In
(Kl
¨
opper et al., 2008b) we introduced a systematic
approach to map the objectives of the AMS to the
objectives of the function modules and thus provided
(in combination with the formal framework) planning
metrics for local planning processes.
We suggest a planning process that resembles the
popular Generalized Partial Global Planning (GPGP)
(Lesser et al., 2004). The conditional evaluation func-
tions are equivalent to the relationships of GPGP. In
difference to GPGP, the conditional evaluation func-
tions are already considered during the local plan-
ning based on the expected behavior of other function
COORDINATION OF SELF-OPTIMIZING MECHATRONIC SYSTEMS - A New Application for Multi-Agent Planning
315

modules. The seamless integration of the interaction
into the local planning requires no special coordina-
tion strategies like in GPGP. The GPGP coordination
strategies work only on single actions, while the con-
ditional evaluation functions in combination with re-
planning and full knowledge of all local plans, en-
ables simultaneous coordination of all actions within
a plan horizon. The feasibility of each local plan can
also be assured.
Another problem is to assure feasibility over all
local problems. This problem occurs, if the function
modules share some resources like energy. Here we
suggest a central coordination agent which governs
the shared resources. If the coordination agent detects
a shortage, it asks the function module agents for a
modification of their behavior. The conditional eval-
uation functions enable the comparison of the sug-
gested behaviors. Thus, the coordination agent selects
the behavior modifications, which have the smallest
negative effect on the overall system performance.
5 APPLICATION SCENARIO
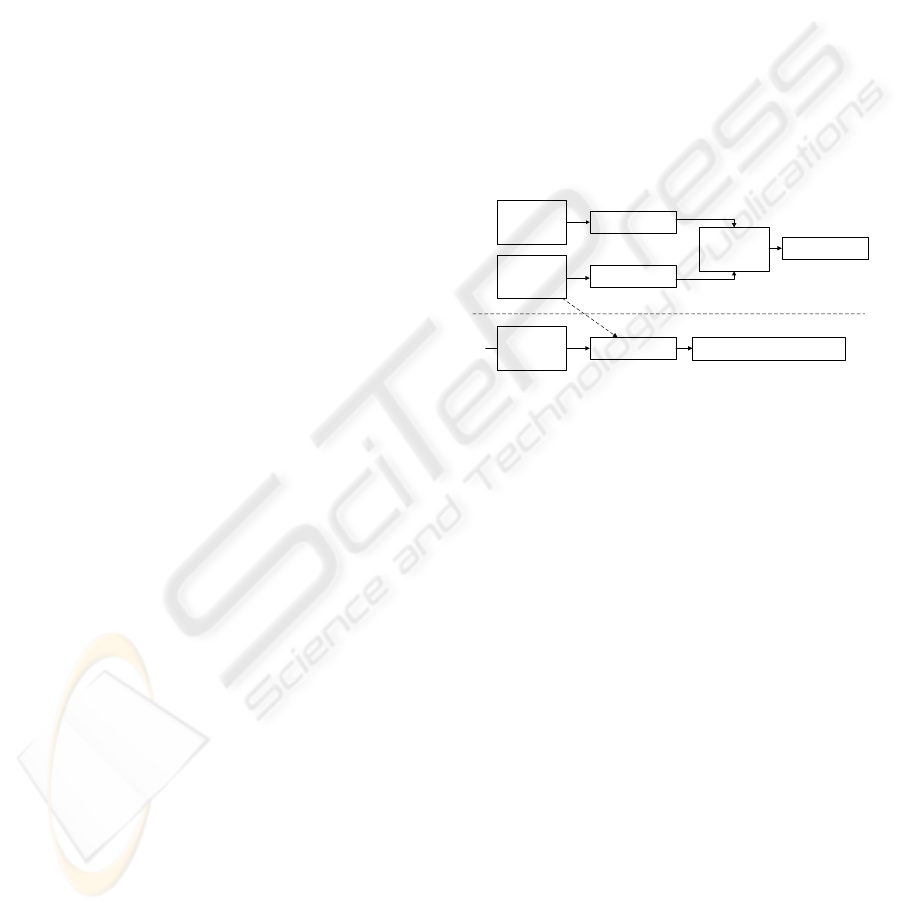
Figure 3 shows how the two multi-agent planning
problems in the context of the RailCab-system can
be coupled in a hierarchical process. The RailCab-
system is an innovative railway system. Autonomous
vehicles – RailCabs – fulfill transportation jobs with a
demand oriented transport disposition. Thus, no fixed
schedule exists. The RailCabs feature a number of
innovative function modules: an active suspension,
an air gap adjustment systems (AGAS) and a linear
drive.
The process hierarchy follows the structuring of
mechatronic systems. On the top level (networked
mechatronics systems) the RailCabs perform the co-
operative actions transportation job swapping and
convoy formation. In the decentralized job swapping
each vehicle constantly analyzes it’s local plan. It
searches for jobs that cause inappropriate costs, e.g.
jobs that cause large detours for picking up and/or de-
livering a single passenger. This kind of job is ad-
vertised for bids of other vehicles. An implemen-
tation of the job swapping reduces the cost of track
utilization by 15% in average during simulation ex-
periments. Details about job swapping can be found
in (Danne et al., 2006). The formation of convoys
reduces energy costs for non-leading vehicles in the
convoy. Assuming a cost reduction of 50%
1
, a plan-
ning procedure reduces travelling costs from 15% up
to 20% over all vehicles in the convoy, considering
1
on perfect flat tracks the reduction is 80% due to slip-
stream effect
costs for necessary detours in order to join the convoy
(D
¨
urksen et al., 2008).
N
M
S
etworked
echatronic
ystem
A
M
S
utonomous
echatronic
ystem
M
F
M
echatronic
unction-
odules
Cooperative Planning for AMS:
- Job Swapping
- Convoy Formation
Route Planning
Cooperative Planning for
Function Modules
Mandatory
Stops
Current
Route
Track Sequence
Figure 3: Hierarchical Planning Process in the RailCab Sce-
nario.
The cooperative planning process for AMS cre-
ates a number of mandatory stops for each vehicle (to
pick-up and disembark passengers). A conventional
route planning process creates a route to connect the
mandatory stops. The resulting sequence of tracks
is input for the cooperative planning process for the
function modules. Each function module locally con-
structs a plan for the activities on this track sequence
with respect to the expected behavior of its fellow
modules. An example of a planning process on this
level is the linear drive, which has to select an accel-
eration profile for each track section. The propulsion
module may take the effects on the active suspension
(high velocity implies high energy consumption) into
consideration. When each local plan is constructed,
the coordination after planning takes places.
6 CONCLUSIONS
In this paper we introduced a new application area
for multi-agent planning: self-optimizing mecha-
tronic systems. The new application area was struc-
tured and first results of multi-agent planning in self-
optimizing mechatronic systems were introduced. In
our opinion the application of multi-agent technology
to mechatronic systems enables the full potential of
the paradigm self-optimization. Two different appli-
cation scenarios for multi-agent planning were intro-
duced and first results were presented. With the com-
bination of self-optimization and multi-agent plan-
ning a new class of technical products with new levels
of utility becomes possible.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
316

ACKNOWLEDGEMENTS
This contribution was developed in the course
of the Collaborative Research Centre 614 Self-
Optimizing Concepts and Structures in Mechanical
Engineering funded by the German Research Foun-
dation (DFG). Further information can be found at
www.sfb614.de/en.
REFERENCES
Al-Safi, Y. and Vyatkin, V. (2007). An ontology-based
reconfiguration agent for intelligent mechatronic sys-
tems. In Holonic and Multi-Agent Systems for Manu-
facturing, number 4569 in Lecture Notes In Artificial
Intelligence, Berlin. Springer Verlag.
Baum, W., Bredenfeld, A., Hans, M., Hertzberg, J., Rit-
ter, A., Schonherr, F., Christaller, T., and Schraft, R.
(2002). Integrating heterogeneous robot and software
components by agent technology. In Robotik 2002,
volume 1679 of VDI-Berichte. VDI Verlag GmbH.
Bradley, D. (1997). The what, why and how of mecha-
tronics. Engineering Science and Education Journal,
6(2):81–88.
Conitzer, V. (2008). Comparing multiagent systems re-
search in combinatorial auctions and voting. In
10th International Symposium on Artificial Intelli-
gence and Mathematics (ISAIM-08).
Danne, C., D
¨
uck, V., and Kl
¨
opper, B. (2006). Selfish moti-
vated cooperative planning in cross networked mecha-
tronic system. International Transactions on Systems
Science and Applications, 2(2):221–225.
David, E., Azoulay-Schwartz, R., and Kraus, S. (2002).
Protocols and strategies for automated multi-attribute
auctions. In Proc. First Joint Conf. on Autonomous
Agents and Multiagent Systems, pages 77–85.
D
¨
urksen, D., Kl
¨
opper, B., Ruth, D., and Thonemann, C.
(2008). Combining distributed matchmaking and
clustering to prune the solution space in distributed
optimization problems – demonstrated in the railcab
system. In Eighth International Conference on Hybrid
Intelligent Systems, pages 108–113,, Barcelona. IEEE
Computer Society, IEEE Computer Society Press.
Faratin, P., Sierra, C., and Jennings, N. R. (1998). Nego-
tiation decision functions for autonomous agents. In-
ternational Journal of Robotics and Autonomous Sys-
tems, 24:3–4.
Gausemeier, J., Kahl, S., and Pook, S. (2008). From
mechatronics to self-optimizing systems. In 7. Inter-
nationales Heinz Nixdorf Symposium, volume 223 of
HNI-Verlagsschriftenreihe, Paderborn. Heinz Nixdorf
Institut, HNI Verlagsschriftenreihe, Paderborn.
Gerevini, A. and Long, D. (2005). Plan constraints and
preferences in pddl3. Technical report, Department
of Electronics for Automation, University of Brescia.
Kirk, D. E. (1970). Optimal control theory. Prentice-Hall,
Englewood Cliffs, NJ.
Kl
¨
opper, B., Romaus, C., Schmidt, A., and V
¨
ocking, H.
(2008a). A multi-agent planning problem for the co-
ordination of functions modules. In Self-Optimizing
Mechatronic Systems: Design the Future.
Kl
¨
opper, B., Romaus, C., Schmidt, A., V
¨
ocking, H., and
Donoth, J. (2008b). Defining a system of objec-
tives for multi-agent coordination of function mod-
ules within mechatronic systems. In : Proceedings
of IDETC/CIE 2008 ASME 2008 International Design
Engineering Technical Conferences & Computers and
Information in Engineering Conference, volume . uk,
uk.
Lesser, V., Decker, K., Wagner, T., Carver, N., Garvey, A.,
Neimann, D., Prassad, M. N., Raja, A., Vincent, R.,
Xuan, P., and Zhang, X. (2004). Evolution of the
gpgp/taems domain-independent coordination frame-
work. Autonomous Agents and Multi-Agent Systems,
9:87–143.
Ogston, E. and Vassiliadis, S. (2002). Unstructured
agent matchmaking: experiments in timing and fuzzy
matching. In SAC ’02: Proceedings of the 2002 ACM
symposium on Applied computing, pages 300–305,
New York, NY, USA. ACM.
Pahl, G. and Beitz, W. (07). Engineering Design: A Sys-
tematic Approach. Springer.
Russell, S. J. and Norvig, P. (2003). Artificial Intelligence:
A Modern Approach. Pearson Education.
Sycara, K., Decker, K., and Williamson, M. (1997).
Middle-agents for the internet. In Proceedings of
IJCAI-97.
(VDI), V. D. I. (2004). Vdi-guideline 2206 - design method-
ology for mechatronic systems. Technical report,
Verein Deutscher Ingenieure (VDI), Beuth-Verlag,
Berlin.
Weerdt, M., Mors, A., and Witteveen, C. (2005). Multi-
agent planning - an introduction to planning and co-
ordination. Technical report, Dept. of Software Tech-
nology, Delft University of Technology.
Witting, K., Schulz, B., Dellnitz, M., Bcker, J., and
Frhlecke, N. (2008). A new approach for online mul-
tiobjective optimization of mechatronic systems. In-
ternational Journal on Software Tools for Technology
Transfer STTT, 10:223–231.
Wooldridge, M. and Jennings, N. R. (1998). Formalizing
the cooperative problem solving process, pages 430–
440. Morgan Kaufmann Publishers Inc., San Fran-
cisco, CA, USA.
COORDINATION OF SELF-OPTIMIZING MECHATRONIC SYSTEMS - A New Application for Multi-Agent Planning
317
