
A HIERARCHICAL 3D CIRCLE DETECTION ALGORITHM
APPLIED IN A GRASPING SCENARIO
Emre Bas¸eski, Dirk Kraft and Norbert Kr
¨
uger
The Maersk Mc-Kinney Moller Institute, University of Southern Denmark
Campusvej 55 DK-5230 Odense M, Odense, Denmark
Keywords:
3D circle detection, Grasping, Stereo vision, Hierarchical representation.
Abstract:
In this work, we address the problem of 3D circle detection in a hierarchical representation which contains
2D and 3D information in the form of multi-modal primitives and their perceptual organizations in terms of
contours. Semantic reasoning on higher levels leads to hypotheses that then become verified on lower levels by
feedback mechanisms. The effects of uncertainties in visually extracted 3D information can be minimized by
detecting a shape in 2D and calculating its dimensions and location in 3D. Therefore, we use the fact that the
perspective projection of a circle on the image plane is an ellipse and we create 3D circle hypotheses from 2D
ellipses and the planes that they lie on. Afterwards, these hypotheses are verified in 2D, where the orientation
and location information is more reliable than in 3D. For evaluation purposes, the algorithm is applied in a
robotics application for grasping cylindrical objects.
1 INTRODUCTION
Circles are important structures in machine vision
since they are a common feature for natural and
human-made objects and they provide more informa-
tion than points and lines about the pose of an ob-
ject. In 3D vision, there are various ways of obtain-
ing edge-like 3D entities (sparse stereo) from a stereo
camera setup. Once the sparse stereo data is grouped
with respect to a perceptual organization scheme, cer-
tain structures can be extracted from individual or
combinations of these perceptual groups. Both, in
dense and sparse stereo the correspondence finding
phase in 3D reconstruction reduces the reliability of
the information. Therefore, while detecting a certain
structure like a 3D circle by using this kind of infor-
mation, one needs to take into account the noise and
uncertainty of the information.
The algorithms that are used to detect 3D circles
can be grouped into three categories. The first cat-
egory consists of voting algorithms like the Hough
transform (Duda et al., 2000). Due to the size of
the parameter space, voting algorithms require much
more memory and computational power than other al-
gorithms.
The second category contains analytical algo-
rithms which use the geometric properties of circles
(e.g., (Xavier et al., 2005)). For laser-range data, this
kind of algorithms run fast and are robust because of
the high-reliability of input data. Stereo vision on the
other hand, introduces too many outliers and uncer-
tainties that make the geometrical properties unstable.
The last category involves fitting algorithms. They
are traditionally based on minimizing a cost func-
tion which depends on a distance function that mea-
sures errors between given points and the fitted circle
(Jiang and Cheng, 2005; Chernov and Lesort, 2005;
Shakarji, 1998). The fitting process can be done ei-
ther in 3D or in 2D. If it is done in 2D, the optimal
plane for the given points is calculated and the points
are projected onto that plane. If the fitting is done
in 3D, the minimization starts with an initial estimate
and tries to converge to the optimal circle. However,
to guarantee convergence, a good initialization is re-
quired. This can be done by starting with multiple
initializations, which decreases the computational ef-
ficiency drastically. One can reduce the parameter
space as in (Jiang and Cheng, 2005) but the noisy na-
ture of stereo vision data decreases the probability of
convergence. Therefore, although fitting in 2D is a
decoupled solution (plane fitting and curve fitting are
handled separately), it is more advantageous in terms
of efficiency and reliability for noisy data.
In this article, an algorithm which is based on fit-
ting in 2D is presented. Note that, the common prac-
tice for such approaches is using only 3D information
496
Baseski E., Kraft D. and Kruger N. (2009).
A HIERARCHICAL 3D CIRCLE DETECTION ALGORITHM APPLIED IN A GRASPING SCENARIO.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 496-502
DOI: 10.5220/0001796004960502
Copyright
c
SciTePress
and its projection onto 2D. The main specifity of our
approach is, instead of using 3D information only, a
hierarchical representation is used which represents
visual information at different levels of semantic (e.g.,
2D versus 3D) as well as different spatial complexity
(local versus global). By that we obtain information
with different levels reliability. Furthermore, there is
a verification process, which is also performed using
different levels in the representation hierarchy.
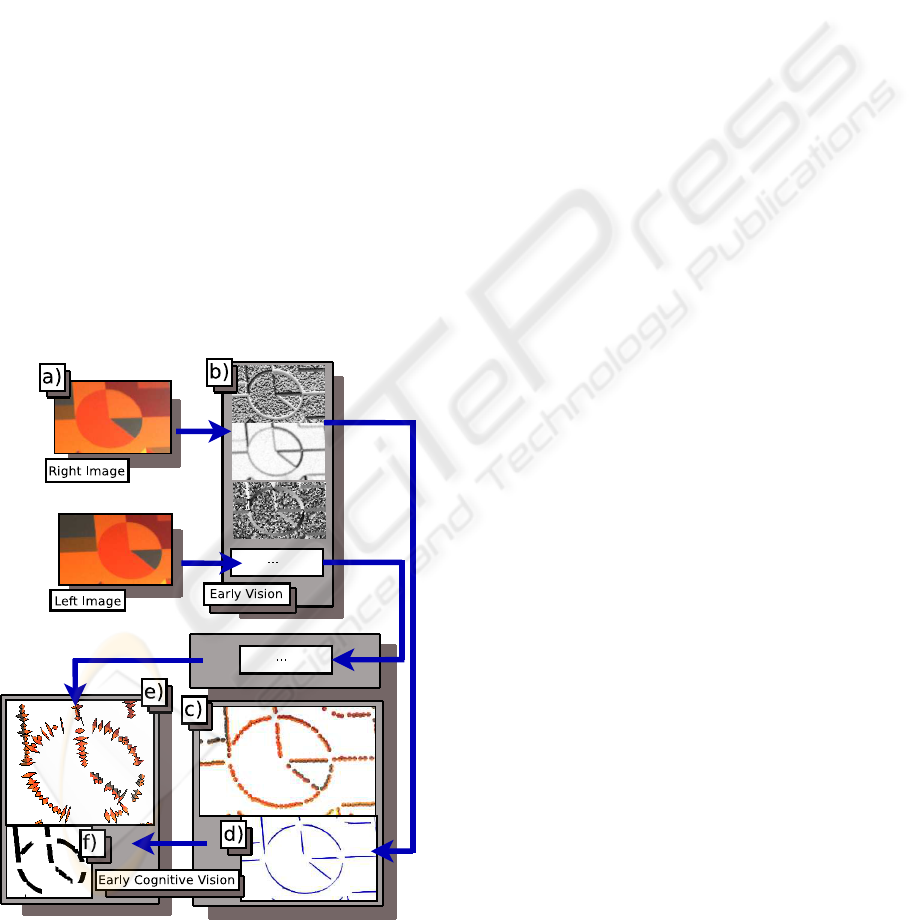
In this work, the hierarchical representation pre-
sented in (Kr
¨
uger et al., 2004) is used. An example
is presented in Figure 1 which shows what kind of
information exists on different levels of the represen-
tation. At the lowest level of the hierarchy, there is
the image with its pixel values (Figure 1(a)). At the
second level, there exists the filtering results (Figure
1(b)) which give rise to the multi-modal 2D primitives
at the third level (Figure 1(c)). At the third level, not
only the 2D primitives but also 2D contours (Figure
1(d)) are available that are created using the percep-
tual organization scheme in (Pugeault et al., 2006).
The last level contains 3D primitives and 3D contours
(Figure 1(e-f)) created from 2D information of the in-
put images.
Figure 1: Different type of information that is available in
the representation hierarchy (a) Original image (b) Filtering
results (c) 2D primitives (d) 2D contours (e) 3D primitives
(f) 3D contours.
Since the reliability and the amount of data de-
creases as the level of the representation hierarchy in-
creases ((Pugeault et al., 2008)), lower levels should
be used to verify the operations done in higher lev-
els. For example, localization of a shape in 3D can be
checked in 2D, once the perspective projection of the
shape is known. Note that, there are more primitives
and their orientation and location information is more
reliable in 2D.
The key idea of our approach is to use differ-
ent aspects of visual information according to their
locality/globality, their semantic richness as well as
their reliability in an efficient way. For example, it is
known that 2D information is more reliable than 3D
(since the stereo correspondence problem introduces
additional errors) but 3D information is required to
find 3D position, 3D orientation, and the radius of a
circle. We make use of this trade-off, so that seman-
tic reasoning on a higher level (e.g., 3D information
leads to 3D hypotheses) becomes verified on a lower
but more reliable level (e.g., 2D information) by feed-
back mechanisms. Another aspect is the locality of
the data being used at the different steps of process-
ing. By using semi-global features (i.e., 2D and 3D
contours) for the computation of hypotheses we de-
crease computational time significantly. Since these
hypotheses are verified using local features, the ef-
fect of additional errors inherent in contours are min-
imized. In this way, we make optimal use of the dif-
ferent levels of the hierarchical representation.
The rest of the article is organized as follows: In
Section 2, the circle detection algorithm is introduced
and some evaluation results in different scenarios with
high variation in terms of circle sizes, 3D positions
and orientation as well as number of circles and other
factors such as occlusion are discussed. The experi-
ments done on different objects in a grasping scenario
where 3D dimension and location play an important
role are presented in Section 3. We conclude with
an evaluation of the algorithm based on these experi-
ments.
2 CIRCLE DETECTION
The algorithm can be summarized in four steps as (1)
ellipse hypotheses creation (Section 2.1), (2) verifi-
cation of these hypotheses (Section 2.2), (3) creating
circles by transferring the verified hypotheses to 3D
(Section 2.3) and (4) verifying the created circles in
2D (Section 2.4).
A HIERARCHICAL 3D CIRCLE DETECTION ALGORITHM APPLIED IN A GRASPING SCENARIO
497

2.1 Computing Ellipse Hypotheses
Because of the correspondence problem in the 3D re-
construction process, the information in 2D can not
be transferred to 3D completely. Therefore, contours
in 2D contain more primitives than corresponding 3D
contours and a 2D contour can contain projections of
more than one 3D contour. These facts are the moti-
vation to use 2D contours to search for 2D ellipses in
the image. Another important fact is that, a single 2D
contour may not be big enough to compute the ellipse
that we are searching for. In Figure 2(c) and (d), the
ellipses fitted to contours in Figure 2(b) are shown.
Since the red contour is not big enough, the ellipse
fitted to that contour is not the desired one.
(a) (b) (c)
(d) (e)
Figure 2: (a) Original image (b) Two contours on the circle
(One is red and the other is white) (c) Fitted ellipse to the
red contour in (b) (d) Fitted ellipse to the white contour in
(b) (e) Two curves can be merged if min(d1,d2) is small
enough.
Having too small data sets for fitting is a com-
mon problem originating from perceptual organiza-
tion. To overcome this difficulty, a merging mech-
anism has been proposed in (Ji and Haralick, 1999)
which is based on proximity. Two curve segments
are merged if the distance between their closest end
points is smaller than a certain value (Figure 2(e)).
The first step of the algorithm starts with merging the
2D contours by using the proximity criterion. This
merging operation creates a new set of 2D contours
which contain the old 2D contours and their combi-
nations.
Let C
i
be the set of all 3D contours whose pro-
jections on the image plane are contained in the 2D
contour c
i
. Then, for the 3D contour C
j
, P · C
j
∈ c
i
iff C
j
∈ C
i
(P is the projection matrix). Note that
when two 2D contours are combined, the result is
represented as c
+
k
and the set of 3D contours whose
projections on the image plane are contained by the
combination is represented as C
+
k
.
The ellipse hypotheses e
k
that the 3D circles are
based on are created from the combined contours
where c
+
k
is the 2D combined contour to which e
k
is
fitted. The ellipse fitting is done using the algorithm
in (Pilu et al., 1996) which is an ellipse specific least-
squares fitting method. The fitted ellipses are repre-
sented using the general ellipse equation given in (1).
ax
2
+ 2bxy + cy
2
+ 2dx + 2 f y + g = 0 (1)
2.2 Verification of Ellipse Hypotheses
Since we use the merged contours, the fitting proce-
dure creates a lot of false ellipses as well as true ones.
Therefore, not all the fitted ellipses are really in the
scene. A true ellipse is shown in Figure 3(c) which
is fitted to the combination of the two red contours in
Figure 3(b) and a false ellipse is shown in Figure 3(d)
which is fitted to the combination of the bottom red
and the green contour in Figure 3(b).
(a) (b) (c) (d)
Figure 3: (a) Input image (b) 2D contours (c) A true ellipse
(d) A false ellipse.
The elimination of false ellipses is done by find-
ing the significance (Lowe, 1987) of the ellipses. The
percentage of covered length of e
i
is calculated from
all 2D primitives (represented by π
j
) that satisfy the
following equations:
kπ
j
− e
i
k ≤ α
1
(2)
|arctan(
d
dx
e
i
|
(x
j
,y
j
)
) − θ
j
| ≤ α
2
(3)
where α
1
and α
2
are thresholds, (2) is the distance
between π
j
and e
i
, (3) is the difference between the
slope of e
i
at (x
j
,y
j
) and the orientation of π
j
(repre-
sented by θ
j
) and (x
j
,y
j
) is the coordinate of the clos-
est point on e
i
to π
j
. If π
j
satisfies (2) and (3), its patch
size (the diameter of the patch covered by the primi-
tive) is added to the total covered length of e
i
. If the
percentage of total covered length of e
i
with respect
to its perimeter is higher than a threshold, namely α
3
,
the ellipse is qualified as a true ellipse. The true el-
lipses for some scenes are shown in Figure 4 where
α
1
= 1 pixel, α
2
= 10
◦
and α
3
= 60%.
2.3 Computing 3D Circle Hypotheses
Due to the fact that the perspective projection of a cir-
cle on the image plane is an ellipse, it is possible to
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
498

Figure 4: Some true ellipse examples.
reconstruct the 3D circle, once the plane that the cir-
cle lies on is known. Therefore, at this point, to create
3D circles, the only further information we need is the
plane p
i
on which the circle that will be created from
ellipse e
i
lies. After calculating p
i
, camera geometry
can be used to find all the parameters of the 3D circle
whose perspective projection is e
i
. Since we know the
2D contour c
+
i
which gave rise to e
i
, it is possible to
use the 3D contours C
+
i
whose projections are con-
tained by c
+
i
to fit p
i
. This operation gives the normal
vector of the 3D circle as it is parallel to the normal
vector of p
i
. What is missing for the 3D circle is the
center and the radius in 3D.
To find the center and the radius of the circle,
discrete points on e
i
are multiplied with the pseudo-
inverse of the projection matrix (P
+
) to create rays,
passing through the camera center and the discrete
points of the ellipse. The intersections of these rays
and the fitted plane p
i
gives 3D points which are sup-
posed to belong to the 3D circle. The center of mass
of these 3D points gives the center of the 3D circle
and this center is used to calculate the radius as the
average distance of the 3D points to the center. Note
that, the 3D circles calculated in the this step can be
represented in parametric form as:
Rcos(t)~u + R sin(t)(~n ×~u) +~c (4)
where ~u is a unit vector from the center of the circle
to any point on the circumference; R is the radius; ~n
is a unit vector perpendicular to the plane and~c is the
center of the circle.
Some results are presented in Figure 5(a-b). Note
that more than one combined contour can represent
the same ellipse and they produce correct circles as
well as false ones because of the 3D reconstruction
uncertainties. The false circles are eliminated in the
next step.
(a) (b)
Figure 5: (a-b) Projection of 3D circles on the image plane
before verification.
2.4 Final Selection of Circle Hypotheses
As the last step, our aim is to find which 3D circle
is the best for ellipses that have been represented by
more than one combined contour. Let E
i
be the set
of ellipses that are similar. It is impossible for them
to have the same curve parameters so we can measure
the similarity between two ellipses as a cost function
depending on the distance between their centers, the
difference of their perimeters and orientations. The
main idea of the last step is to calculate the signifi-
cance of ellipses which are projections of circles cre-
ated from the ellipses in set E
i
. We do the evaluation
in 2D since the amount and the reliability of data in
this dimension is higher than 3D. To find the ellipse
which is the perspective projection of a 3D circle, we
can pick 5 points of the circle on the image plane and
use the implicit equation of the conic through 5 points
as in (5).
x
2
xy y
2
x y 1
x
2
1
x
1
y
1
y
2
1
x
1
y
1
1
···
x
2
5
x
5
y
5
y
2
5
x
5
y
5
1
= 0 (5)
The 5 points can be created from (4) for t ∈
{0,80...320}. Equation 5 gives the generic equation
of an ellipse as in (1). Therefore, we find the sig-
nificance of these projected ellipses by using all 2D
primitives π
j
that satisfy Equations (2) and (3). For
each set E
i
, only the one circle with the highest sig-
nificance is kept. Some results are presented in Figure
6 and 7.
2.5 Problems
Although the algorithm is stable on tilted, partially
occluded and cluttered circles, perceptual organiza-
tion can create problems in case of good continuation
between circular and non-circular parts. Figure 8(b)
A HIERARCHICAL 3D CIRCLE DETECTION ALGORITHM APPLIED IN A GRASPING SCENARIO
499

Figure 6: 3D circle detection results on different scenarios.
(White ellipses are the projections of 3D circles onto the
image plane).
illustrates a case, where the red 2D contour combines
a circular and a non-circular part. In such cases, the
remaining circular part (e.g., green contour in Figure
8(b)) may create a valid ellipse hypothesis but trans-
ferring this hypothesis to 3D is heavily dependent on
the plane that is fitted to the 3D points and usually
this situation leads to incorrect 3D circles as shown in
Figure 8(c).
3 APPLICATION IN A GRASPING
SCENARIO
The algorithm described in the previous section is ap-
plied in a robot grasping application. In this section
we describe the setup and use of this application to
evaluate the circle detection.
3.1 System Description
The robotic system used consist of a six degree of
freedom industrial robot (St
¨
aubli RX-60B), a two fin-
ger parallel gripper (Schunk PG 70) and a Point Grey
BumbleBee2 stereo camera (see Figure 9(a)). The
camera is calibrated relative to the robot coordinate
system. Therefore the output of the above algorithm
can be directly used for the computation of the grasp-
ing position.
Figure 7: 3D circle detection results for multiple objects,
different orientation and occlusion. (White ellipses are the
projections of 3D circles onto the image plane).
Figure 8: (a) Original image (b) 2D contours corresponding
to (a) (c) Detected 3D circle.
3.2 Grasp Definition
For this work we selected one of the grasps defined in
the grasping application to evaluate the quality of the
circle detection. The cylindrical object is grasped on
its brim (see Figure 9(b)). The position of the grasp is
expressed similar to the parametric form in (4). From
this observation directly follows that there is actually
not one possible grasp, but a one dimensional mani-
fold of grasps (varying the grasp position around the
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
500

(a)
(b)
G
y
x
G
G
z
(c)
Figure 9: (a) Robot system consisting of six degree of free-
dom industrial robot, two finger gripper and two stereo cam-
era systems (The lower camera systems was used for this
work). (b) Grasp at the brim of the cylindrical object. (c)
Gripper coordinate system.
circumference of the circle). Additionally the grasp-
ing depth h can be chosen according to the require-
ments of the scene. The position p of the grasper can
therefore be defined as:
~p = Rcos(t)~u + R sin(t)(~n ×~u) +~c −~nh . (6)
Figure 9(c) shows the position and orientation of the
grasper coordinate system defined at the end of the
fingers. The grasper needs to be aligned in the follow-
ing way: ~z
G
= −~n and ~y
G
= cos(t)~u + sin(t)(~n ×~u).
While the gripper opening can be defined as d =
min(2R,d
max
).
3.3 Evaluation
Figure 10 shows a number of scenarios where the
gripper is moved to the grasping position computed
based on the circle information (h = 2 cm, t was used
in a standard configuration except when this would
have lead to a collision). For the set of experiments
shown, the number of true positives (a circle that ex-
ists in the scene is detected) is 35, the number of false
negatives (a circle that exists in the scene is not de-
tected) is 1 and the number of false positives (a cir-
cle is detected that is not present in the scene) is 13.
As a conclusion, 97.2% of the circles present in the
scene have been detected and out of all detected cir-
cles (true positives and false positives), 72.9% of them
correspond to the circles present in the scene. Note
that, the false positives occur for relatively big circles
where the numerical stability decreases. On the other
hand, using the saliency measure (which is high for
true positives) of the found circles, the true positives
have higher chance to be choosen for grasping. Also,
the different setups show that our system is able to
cope with different levels of complexity.
4 CONCLUSIONS
We have discussed a 3D circle detection algorithm
which makes use of different aspects of 2D and 3D in-
formation for hypothesis generation and verification.
To be able to cope with the uncertainties of sparse
stereo data, 3D circles are localized in 3D by con-
sidering 2D hypotheses and verified in 2D, where the
information is more reliable. The potential of the ap-
proach has been shown on a grasping application for
different scenarios. As a future work, the problem of
combining circular and non-circular parts will be han-
dled by splitting 2D contours with respect to junctions
and 3D structure of the contour.
ACKNOWLEDGEMENTS
The work described in this paper was conducted
within the EU Cognitive Systems project PACO-
PLUS (IST-FP6-IP-027657) funded by the European
Commission.
REFERENCES
Chernov, N. and Lesort, C. (2005). Least Squares Fitting of
Circles. J. Math. Imaging Vis., 23(3):239–252.
Duda, R. O., Hart, P. E., and Stork, D. G. (2000). Pattern
Classification. Wiley-Interscience Publication.
Ji, Q. and Haralick, R. M. (1999). A Statistically Efficient
Method for Ellipse Detection. In ICIP (2), pages 730–
734.
Jiang, X. and Cheng, D.-C. (2005). Fitting of 3D Circles
and Ellipses Using a Parameter Decomposition Ap-
proach. In 3DIM ’05: Proceedings of the Fifth In-
ternational Conference on 3-D Digital Imaging and
Modeling, pages 103–109. IEEE Computer Society.
Kr
¨
uger, N., Lappe, M., and W
¨
org
¨
otter, F. (2004). Bi-
ologically Motivated Multi-modal Processing of Vi-
sual Primitives. The Interdisciplinary Journal of Ar-
A HIERARCHICAL 3D CIRCLE DETECTION ALGORITHM APPLIED IN A GRASPING SCENARIO
501

Figure 10: Detected circles and applied grasps. The circles were drawn into the images and the occluded parts were corrected
afterward to improve the readers scene understanding. The scenes are of different complexity, starting out with single objects,
going to objects included in each other, multiple (and more complex) objects and finally tilted single objects.
tificial Intelligence and the Simulation of Behaviour,
1(5):417–428.
Lowe, D. G. (1987). Three-Dimensional Object Recogni-
tion from Single Two-Dimensional Images. Artificial
Intelligence, 31(3):355–395.
Pilu, M., Fitzgibbon, A., and Fisher, R. (1996). Ellipse-
Specific Direct Least-Square Fitting. In In Proc. IEEE
ICIP.
Pugeault, N., Kalkan, S., Bas¸eski, E., W
¨
org
¨
otter, F., and
Kr
¨
uger, N. (2008). Reconstruction Uncertainty and
3D Relations. In Proceedings of Int. Conf. on Com-
puter Vision Theory and Applications (VISAPP’08).
Pugeault, N., W
¨
org
¨
otter, F., and Kr
¨
uger, N. (2006). Multi-
modal Scene Reconstruction Using Perceptual Group-
ing Constraints. In Proceedings of the IEEE Work-
shop on Perceptual Organization in Computer Vision
(in conjunction with CVPR’06).
Shakarji, C. (1998). Least-Squares Fitting Algorithms of
the NIST Algorithm Testing System. Res. Nat. Inst.
Stand. Techn., 103:633–641.
Xavier, J., Pacheco, M., Castro, D., Ruano, A., and Nunes,
U. (2005). Fast Line, Arc/Circle and Leg Detection
from Laser Scan Data in a Player Driver. In Robotics
and Automation, 2005. ICRA 2005. Proceedings of the
2005 IEEE International Conference on, pages 3930–
3935.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
502
