
IMPLICIT TRACKING OF MULTIPLE OBJECTS BASED ON
BAYESIAN REGION LABEL ASSIGNMENT
Masaya Ikeda, Kan Okubo and Norio Tagawa
Faculty of System Design, Tokyo Metropolitan University, Asahigaoka 6-6, Hino, Tokyo, Japan
Keywords: Object tracking, MAP assignment, Occlusion, Optical flow.
Abstract: For tracking objects, the various template matching methods are usually used. However, those cannot
completely cope with apparent changes of a target object in images. On the other hand, to discriminate
multiple objects in still images, the label assignment based on the MAP estimation using object's features is
convenient. In this study, we propose a method which enables to track multiple objects stably without
explicit tracking by extending the above MAP assignment in the temporal direction. We propose two
techniques; information of target position and its size detected in the previous frame is propagated to the
current frame as a prior probability of the target region, and distribution properties of target’s feature values
in a feature space are adaptively updated based on detection results at each frame. Since the proposed
method is based on a label assignment and then, it is not an explicit tracking based on target appearance in
images, the method is robust especially for occlusion.
1 INTRODUCTION
Moving objects detection and tracking have been
studied successfully up to now as a fundamental
technology of an image sequence processing. For
tracking objects, the various template matching
methods are usually used. The template matching
method using the intensity pattern of the object
region detected in the previous frame as a template
can detect moving regions directly in the next frame.
Hence, such the method is effective under the
condition that target’s shape doesn’t change in
images. However, it is difficult to track it stably if its
shape changes drastically in images in the cases that
motion of target object has a component of view
direction and/or occlusion arises. Some methods
have been proposed to avoid these shortcomings
(
Harville et al., 1999, Dowson and Bowden, 2008), but
those are not pragmatic methods from the view
points of complexity and so on.
Using the background subtraction and/or the
temporal subtraction, moving regions can be
detected. (
Stauffer and Grimson, 1999). However, the
tracking procedure is required so as to discriminate
identical region from multiple moving regions.
Therefore, the methods, which are based on the
region detection using object’s features without an
explicit tracking, draw attention. (
Kamijo et al., 2001).
These methods can discriminate multiple objects
respectively using object’s features. Object’s motion
is usually used as a feature. However, the target
objects having the same motion can not be
discriminated by motion. Even if other features are
also used, the same ambiguity can not be eliminated.
In this study, we construct a method which
enables to stably track multiple objects implicitly, by
extending the above MAP assignment for image
sequences. In this method, 2-D motion is used as a
feature of objects. Additionally, to avoid the above
mentioned ambiguity caused by adopting single
feature, information of the target position and its size
detected in the previous frame is propagated to the
current frame as a prior probability of target region.
In this framework, occlusion is adaptively processed
with low cost, although recently the particle filter
has been successfully applied to an explicit tracking
to exactly treat occlusion. (Särkkä et al., 2007)
2 OUTLINE OF PROPOSITION
In the proposed method, image sequence is treated
as a set of successive still images and each image is
divided into local small regions. Hence, objects and
background is assumed to be a set of these regions.
Label number assigned for each region shows which
503
Ikeda M., Okubo K. and Tagawa N. (2009).
IMPLICIT TRACKING OF MULTIPLE OBJECTS BASED ON BAYESIAN REGION LABEL ASSIGNMENT.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 503-506
DOI: 10.5220/0001796905030506
Copyright
c
SciTePress
object exists at each region. Therefore, we can detect
objects by estimating the label numbers of all
regions. The range of label value, i.e. the number of
classes, indicates the total number of target objects
and background. If the number of objects is P, the
number of classes is P+1. Although generally,
background is not considered as a class, in this study,
it is treated as one of target objects, by which the
proposed method can be extended in future to handle
the images taken by a moving camera. The class
number having the highest probability among the all
classes at each region is assigned to the
corresponding region as an estimated label. Figure 1
shows an example of the ideal labeling result.
The total probability model consists of the model
of the object’s feature used for object discrimination
and the model of the target position and its size as a
prior probability of target region. The latter works
effectively in the case that the former is not useful
for label estimation. Although the performance is
expected to be improved by adopting multiple
features, in order to examine the effectiveness of the
proposed implicit tracking strategy, in this study,
optical flow is singly used. The details of the
probability model are described in the following
section.
3 PROBABILITY MODELS
3.1 Optical Flow Model
By defining optical flow model for every object at
each frame, we can select the suitable optical flow
model for the observed optical flow at each region.
In this study, we assume that all optical flows
observed at all regions having the same label are
similar to the object’s true 2-D motion. Figure 2
shows an example of the optical flow distribution.
We assume that observed optical flows
corresponding to each object are modeled as a 2-D
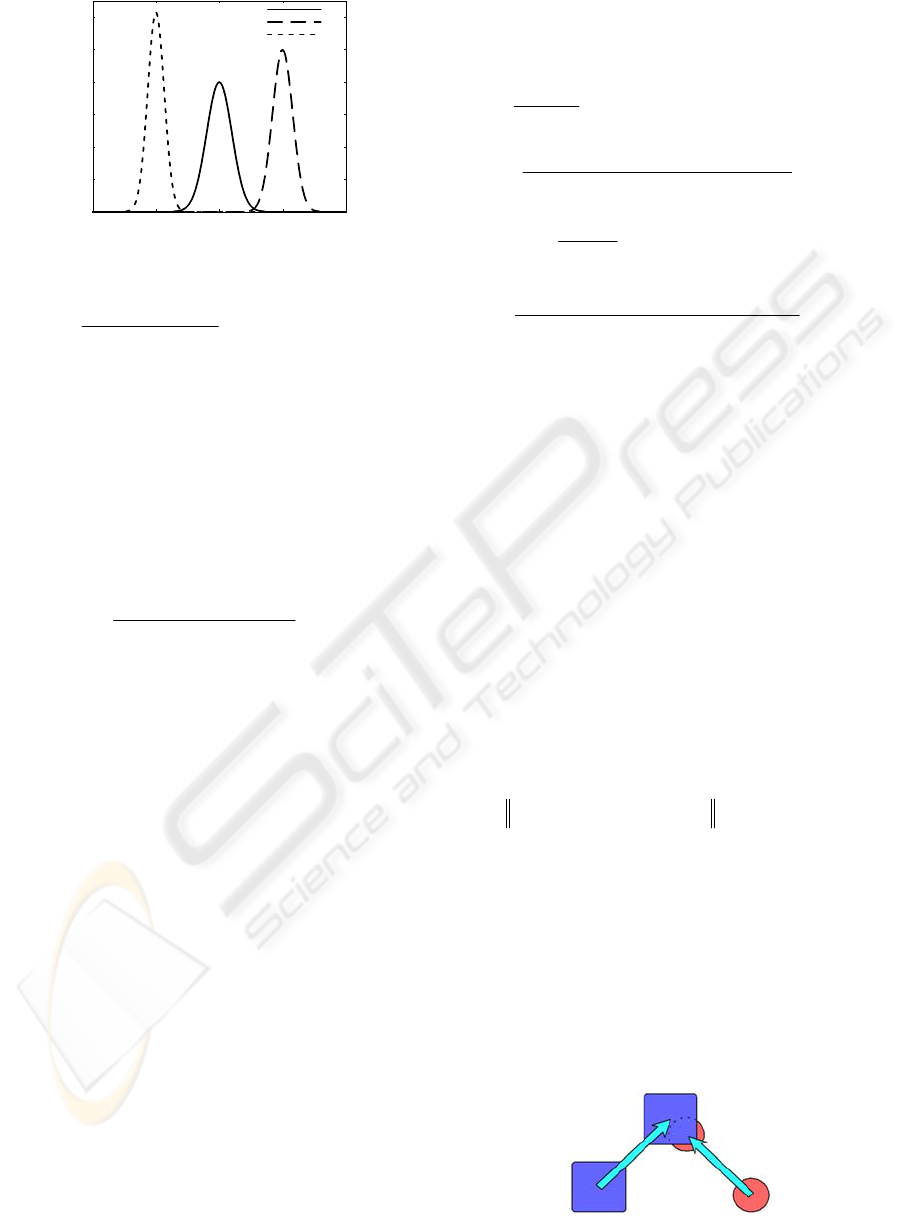
normal distribution. Figure 3 shows an ideal optical
flow model which is represented as a 1-D
distribution for simplicity. The mean and the
covariance of the normal distribution are unknown
parameters.
()
()
()
()
()
() ()
()
() ()
)}]()(){(
2
1
exp[
1
)|(
,
1)(
,
,,
t
k
t
ji
tv
k
Tt
k
t
ji
t
ji
t
ji
VMVM
Z
kLMP
−Σ−−=
=
−
(1)
Figure 1: An example of the ideal labeling result.
Figure 2: An example of the optical flow distribution.
Where Z shows a normalization constant,
),( ji
shows the index of local region,
)(
),(
t
ji
M
shows optical
flow observed at the region
),( ji
in the frame t,
)(t
k
V
and
)(tv
k
Σ
show the mean and the covariance matrix
of optical flows at the regions the labels of which
take the same value k.
)(
),(
t
ji
L is a label variable of the
region
),( ji . Figure 3 shows an illustration of the
optical flow probability containing two moving
objects and background with no motion.
3.2 Prior Probability of Target Region
In the case that there are multiple objects which have
similar motion in the images, it is difficult to
recognize the each object respectively using optical
flow only. Hence, we define prior probabilities of
target regions to distinguish these objects which
have the similar motion. In this method, we use the
information of target position
and its size. At first, existence probability of each
object in image is defined as follows:
()
(
)
)]}],(),[()(
)],(),{[(
2
1
exp[
1
)|),((
)()(1)(
)()(
,
t
k
t
k
tx
k
Tt
k
t
k
t
ji
yxji
yxji
Z
kLjiP
−⋅Σ⋅
−−=
=
−
(2)
In Eq. 2,
),(
)()( t
k
t
k
yx and
)(tx
k
Σ are parameters to be
determined. From this probability, prior probability
of the label variable can be constructed as follows:
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
504
0
0.1
0.2
0.3
0.4
0.5
0.6
-10 -5 0 5 10
Probability
Magnitude of optical flow
label 0
label 1
label 2
Figure 3: An ideal optical flow model.
4 IMPLICIT TRACKING
4.1 MAP Assignment
Posterior probability of the label variable
)(
),(
t
ji
L is
introduced as follows:
()
()
()
()
()
()
()
(
)
()
()
()
()
)(
)()|(
)|(
,
,,,
,,
t
ji
t
ji
t
ji
t
ji
t
ji
t
ji
MP
LPLMP
MLP
⋅
=
(4)
The label having maximum value of the above
posterior probability is assigned to the
corresponding region. The numerator of it depends
on the label value, and hence, the maximization of
the posterior probability corresponds to the
maximization of its numerator.
4.2 Information Propagation by
Parameters Updating
To treat the proposed strategy as a successive
processing like the Kalman filter based on the
Bayesian network,
)(
),(
t
ji
L is considered as a hidden
state variable and the state transition equation has to
be defined. Through the estimation of
)(
),(
t
ji
L ,
information of the previous frames can be
propagated. However, in general, suitable parameter
estimation requires the large amount of
computational costs, for example, by applying the
EM algorithm. (Tagawa et al., 2008). Hence, in this
study, to simplify the model and to estimate these
parameters with low cost, the above information
propagation is done by updating the parameters
included in Eqs. 1 and 2 using the label estimates
of
{
}
)1(
),(
−t
ji
L and the observation
{}
)1(
),(
−t
ji
M in the
previous frame. The updating equations are as
follows:
()
(
)
k
t
jiS
t
k
N
M
V
k
1
,
)(
−
Σ
=
(5)
()
()
(
)
(
)
()
() ()
k
t
k
t
ji
Tt
k
t
ji
S
tv
k
N
VMVM
k
)}(){(
1
,
1
,
−−Σ
=Σ
−−
(6)
(
)
)()()(
,
),(
t
k
k
S
t
k
t
k
V
N
ji
yx
k
+
Σ
=
(7)
()
k
Tt
k
t
k
t
k
t
kS
tx
k
N
yxjiyxji
k
}))(),(())(),{((
)()()()(
−⋅−Σ
=Σ
(8)
In these equations,
k
S
indicates all regions the label
number of which is k, and
k
N
shows the numbers of such
the regions.
4.3 Occlusion Handling
We need to consider the handling occlusion which
indicates that target is covered by other objects in
images. Occlusion is general problem in studies of
moving objects tracking. By the above defined
proposed method, target may be missed, when
occlusion occurs and the above mentioned
information propagation cannot be carried, i.e., it is
impossible to compute the posterior probability. It
means that tracking cannot be continued. However,
we can predict whether occlusion occurs or not
using the following value D computed from the
object’s position, size and motion kept in each frame.
(
)
(
)
(
)
(
)
(
)
(
)
t
l
t
l
t
k
t
k
XVXVD +−+=
(9)
Where, k and l show label values. Figure 4 shows an
illustration of occlusion prediction. If D is smaller
than the threshold value computed based on the size
of objects, we judge occlusion occurs. If occlusion is
detected based on the information of the previous
frame, we stop propagating the parameters of the
posterior probabilities and keep the parameters just
before occlusion arising as the current parameters.
This processing makes target not missed, because
the posterior probability is computed without being
lost.
Figure 4: An illustration of occlusion prediction.
()
()
∑
=
=
==
k
t
ji
t
ji
t
ji
kLjiP
kLjiP
kLP
)|),((
)|),((
)(
)(
),(
)(
),(
,
(3)
IMPLICIT TRACKING OF MULTIPLE OBJECTS BASED ON BAYESIAN REGION LABEL ASSIGNMENT
505

5 EXPERIMENTS
5.1 Summary of Experiments
We performed experiments as follows to confirm the
ability of the proposed strategy of the implicit
tracking. Images used in the experiments have
640×480 pixels with no pre-filtering. We detected
optical flows using the gradient method and used it
as an observation. To improve precision of optical
flow, we calculated temporal differentials using
multiple frames.
(1) Experiment 1 (Tracking Two Men Whose
Motions are Similar to Each Other).
In this experiment, we tracked the two men who are
moving in similar direction to confirm the effect of
the prior probability. Figure 5 shows the results. The
top figures show the input images.
(2) Experiment 2 (Tracking Two Men in the
Case that Occlusion Occurs).
In this experiment,
we consider the case that occlusion occurs halfway.
We track the two men moving to the opposite
direction. Figure 6 shows the results. The top figures
show the input images. The middle figures show the
tracking results with no use of occlusion detection.
The bottom figures show the results using occlusion
detection.
5.2 Discussions
The results of experiment 2 show that we can track
the object covered with the other objects without
missing it by the prediction of occlusion. The
tracking without prediction missed target object and
detected wrong region, because the probability
model of the object covered with the other objects is
computed by the wrong parameters. If we predicted
occlusion, we could go on tracking target objects
without missing it, because the probability model
can be maintained.
Figure 5: Result of experiment 1.
Figure 6: Result of experiment 2.
6 CONCLUSIONS
In the proposed implicit tracking strategy, we
estimate region label based on optical flow for each
frame. By updating the parameters for the each
frame using the information of the previous frame,
the proposed model and algorithm are simplified
rather than the exact belief propagation on the
Bayesian network. Our strategy is suitable for
treating occlusion because of its label assignment
scheme at each region. In the future studies, the
performance of the proposed method has to be
compared with that of the standard tracking
algorithm. Additionally, our method should be
improved using color information and more complex
model like the multivariate normal mixture.
REFERENCES
Harville, M., Rahimi, A., Darrell, T., Gorden, G., Woodfill,
J. (1999). 3D pose tracking with linear depth and
brightness constraints. Proc. ICCV, 206-213.
Dowson, N., Bowden, R. (2008). Mutual information for
Lucas-Kanade tracking (MILK): An inverse
compositional formulation. IEEE Trans., PAMI, 30, 1,
180-185.
Stauffer, C., Grimson, W.E.L. (1999). Adaptive
background mixture models for real-time tracking.
Proc. CVPR, 246-252.
Kamijo, S., Ikeuchi, K., Sakauchi, M. (2001). Event
recognitions from traffic images based on spatio-
temporal Markov random field model. Proc. 5
th
World
Multi Conf. on Systemics, Cybernetics and
Informatics, CD-ROM.
Särkkä, S., Vehtari, A., Lampinen, J. (2007). Rao-
Blackwellized particle filter for multiple target
tracking. Information Fusion, 8, 1, 2-15.
Tagawa, N., Kawaguchi, J., Naganuma, S., Okubo, K.
(2008). Direct 3-D shape recovery from image
sequence based on multi-scale Bayesian network. Proc.
ICPR (to appear).
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
506
