
USING THE DISCRETE HADAMARD TRANSFORM TO DETECT
MOVING OBJECTS IN SURVEILLANCE VIDEO
Chanyul Kim and Noel E.O’Connor
CLARITY: Centre for Sensor Web Technologies
Dublin City University, Glasnevin, Dublin, Ireland
Keywords:
Discrete Hadamard Transform, Moving object detection, Edge.
Abstract:
In this paper we present an approach to object detection in surveillance video based on detecting moving edges
using the Hadamard transform. The proposed method is characterized by robustness to illumination changes
and ghosting effects and provides high speed detection, making it particularly suitable for surveillance appli-
cations. In addition to presenting an approach to moving edge detection using the Hadamard transform, we
introduce two measures to track edge history, Pixel Bit Mask Difference (P B M D ) and History Update Value
(H U V ) that help reduce the false detections commonly experienced by approaches based on moving edges.
Experimental results show that the proposed algorithm overcomes the traditional drawbacks of frame differ-
encing and outperforms existing edge-based approaches in terms of both detection results and computational
complexity.
1 INTRODUCTION
Moving object detection in video sequences is an im-
portant research area since it can be viewed as a lower
level vision task necessary to achieve higher level
event understanding. It is a critical task for appli-
cations such as video surveillance, traffic monitoring
and video compression e.g. region of interest (ROI)
coding. In this paper we propose a computationally
efficient moving object detection algorithm based on
moving edge detection using the Discrete Hadamard
Transform (DHT) that is particularly suited to real-
time surveillance scenarios.
Within the literature we can consider the follow-
ing main approaches to object detection in surveil-
lance scenarios: frame differencing, background sub-
traction, optical flow and pre-trained statistical ap-
proaches. Statistical training methods require many
training samples and typically require significant
computational complexity to obtain good immunity
to noise (Wang and Suter, 2006). Optical flow meth-
ods allow accurate detection of moving objects that
are free of ghosts, but they can have problems with il-
lumination changes. Such approaches are often com-
plex and not suitable for real-time systems, although
there has been some work on achieving real-time op-
eration (Jongcheol et al., 2005; Bruhn and Schnorr,
2006). The background subtraction method, some-
times referred to as background removal, is a popular
approach, where each video frame is compared to a
background model and significant deviations from the
model are considered to be moving objects. Back-
ground models include recursive and non-recursive
methods (classification terms suggested by Cheng
and Kamth (Cheung and Kamath, 2004)). Back-
ground subtraction should be able to adapt to grad-
ual or sudden illumination changes and local changes
such as shadows. In order to handle non-stationary
background objects, such as waving trees and image
changes due to camera motion, complex algorithms
are needed. Many background subtraction algorithms
are surveyed in (Shireen et al., 2008). Frame differ-
encing, sometimes referred to temporal differencing,
is the most computationally efficient approach, but is
prone to producing poor results. The difference frame
is binarised by thresholding at some pre-determined
value to obtain changed regions of the video. How-
ever, the appropriate threshold is dependent on the
scene as well as illumination that may change over
time. This means that the threshold value should be
512
Kim C. and E.O’Connor N. (2009).
USING THE DISCRETE HADAMARD TRANSFORM TO DETECT MOVING OBJECTS IN SURVEILLANCE VIDEO.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 512-518
DOI: 10.5220/0001800205120518
Copyright
c
SciTePress

calculated dynamically based on image content, so
experimentally choosing a value is usually not appro-
priate for automatic systems.
Since the primary objective of our work is com-
putational efficiency and ease of implementation for
real-time systems, we target a frame differencing ap-
proach, but one based on image edges. Our approach
does not critically depend on a particular threshold
thereby avoiding some of the drawbacks of traditional
frame differencing approaches. To achieve computa-
tional efficiency, we propose an edge detection algo-
rithm based on the Discrete Hadamard Transform in-
stead of conventional methods such as Sobel, Canny
and Prewitt operations which often introduce signif-
icant complexity for background modeling (Shireen
et al., 2008). Furthermore, our block-based approach
lends itself to efficient memory usage and robust pro-
cessing.
The remainder of the paper is organised as fol-
lows. Section 2 describes related work and the moti-
vation for our approach. Section 3 describes the over-
all architecture as well as the details of the proposed
method. Experimental results are presented in Sec-
tion 4. Section 5 contains the conclusions.
2 RELATED WORK
Frame differencing uses the video frame at time t − 1
as the background model for the frame at time t. The
unchanged part is eliminated in the difference im-
age (difference map) with only the changed areas re-
tained. Frame differencing is sensitive to noise and
variations in illumination and fails to identify the in-
terior pixels of a large, uniformly-colored moving ob-
ject (Shireen et al., 2008; Radke et al., 2005). It is
well known that object detection using single frame
differencing, while computationally much simpler
than other techniques, is more liable to generate large
areas of false foregrounds known as ghosts (Archetti
et al., 2006). An appropriate threshold value for lo-
calising the moving objects can be set empirically or
adaptively. In the former case, the threshold value
is fixed for all pixels in the frame and determined
experimentally based on a large database (Durucan
and Ebrahimi, 2000). In the latter case, the threshold
value is adapted by pre-defined rules (Costantini et al.,
2001; Otsu, 1979). To mitigate against the critical de-
pendency on thresholds, Cavallaro proposed using a
Sobel edge detector between the current and the ref-
erence image to leverage information edges that are
immune to noise and are not changed by illumination
variations (Cavallaro and Ebrahimi, 2001). Julius et
al. also proposed edge based moving object detection
for surveillance applications to obtain robustness to
illumination changes (Julius et al., 2007). Their ap-
proach measured the difference between edge pixels
to match and classify edges. Chaohui et al. also pre-
sented a moving object algorithm based on frame dif-
ferencing and edge detection (Chaohui et al., 2007),
and their approach is most similar to that proposed
in this paper. In their proposed method, no thresh-
old value is applied in the binarisation process but
only used for counting non-zero pixels in the moving
mask. However, their approach introduces computa-
tional complexity due to the presence of the following
steps: (1) an image filter to reduce noise; (2) calcula-
tion of the amplitude and direction of the gradient of
each pixel; (3) application of thinning to obtain edges
one pixel in width; (4) application of the threshold
(simple or complex).
3 THE PROPOSED APPROACH
The proposed moving object detection method con-
sists of three components, edge detection, moving
edge detection and post-processing. An edge is de-
tected by classifying coefficients of the DHT to avoid
the computational burden of using conventional edge
detection algorithms. The moving edges are extracted
by frame differencing the edge map and calculating
and tracking the transitions of edge patterns in the
same 2 × 2 block. Finally, moving objects are ob-
tained by a post-processing step that includes region
marking and morphological operations.
3.1 Discrete Hadamard Transform
The two-dimensional Hadamard transform can be
written in matrix and series form as;
F(u, v) =
H
N
[ f(x,y)]H
t
N
N
(1)
=
H
N
[ f(x,y)]H
N
N
(2)
=
1
N
∑
N−1
x=0
∑
N−1
y=0
f(x, y)(−1)
s(x,y,u,v)
(3)
where s(x, y, u, v) ≡
∑
n−1
i=0
[g
i
(u)x
i
+ g
i
(v)y
i
].
(x
i
, y
i
, u
i
, v
i
) is the binary representation of the
(x, y,u, v), (x, y) and (u, v) are row and column
position in pixel and DHT domain, and
g
0
≡ u
n−1
g
1
≡ u
n−1
+ u
n−2
g
2
≡ u
n−2
+ u
n−3
.
.
.
g
n−1
≡ u
1
+ u
0
USING THE DISCRETE HADAMARD TRANSFORM TO DETECT MOVING OBJECTS IN SURVEILLANCE VIDEO
513

Non-
Edge
Edge
Figure 1: Edge classification patterns in a 2× 2 pixel block;
patterns are denoted as numbers according to edge direction
(horizontal, vertical, diagonal and negative diagonal).
We use the ordered version of the DHT so that se-
quency is an increasing function of the number of
rows (or columns). A conservationof energy property
exists between the spatial domain and the Hadamard
domain. It is useful as a criterion for classifying edges
(as described later in Eq (5)). A 2× 2 DHT is used to
classify edge patterns in this paper.
3.2 Edge Detection based On DHT
Coefficients
Edge patterns are assigned identifying numbers by
classifying different patterns of pixels in a 2×2 block
as shown in Figure 1. Let the coefficients of the
Hadamard transform in a 2 × 2 image block be de-
noted as F(u, v). We first calculate the following:
χ = max(|F(1, 0)|,|F(0, 1)|, |F(1, 1)|) (4)
D =
F(1,0)
F(0,1)
+ 0.5
if F(0, 1) 6= 0
2 otherwise
(5)
where [] is a round function.
P (i), i =
0 if (χ ≤ τ)
1 if (χ > τ
T
D = 2
T
F(1,0) > 0)
2 if (χ > τ
T
D = 2
T
F(1,0) < 0)
3 if (χ > τ
T
D = 1
T
F(1,1) > 0
T
F(1,0) > 0)
4 if (χ > τ
T
D = 1
T
F(1,1) < 0
T
F(1,0) < 0)
5 if (χ > τ
T
D = 1
T
F(1,1) < 0
T
F(1,0) < 0)
6 if (χ > τ
T
D = 1
T
F(1,1) < 0
T
F(1,0) > 0)
7 if (χ > τ
T
D = −1
T
F(1, 1) < 0
T
F(1,0) < 0)
8 if (χ > τ
T
D = −1
T
F(1, 1) > 0
T
F(1,0) > 0)
9 if (χ > τ
T
D = −1
T
F(1, 1) > 0
T
F(1,0) > 0)
10 if (χ > τ
T
D = −1
T
F(1, 1) > 0
T
F(1,0) < 0)
11 if (χ > τ
T
D = 0
T
F(0,1) > 0)
12 if (χ > τ
T
D = 0
T
F(0,1) < 0)
(6)
For a non-edge region (assigned P (0) as shown
in Figure 1), the non zero position coefficients
(F(1, 0), F(0, 1),F(1, 1)) should be zero. However,
the non-zero position coefficients increase according
to edge strength. Therefore if χ is greater than a pre-
defined threshold value (τ), the block is classified as
an edge block, otherwise as a non-edge block. We set
this pre-defined noise threshold to ten in this paper.
This means that when the difference of pixel values
is greater than ten, we consider this block as an edge.
Pattern P (i) is obtained via Eq (5) and the properties
of the Hadamard transform, as shown in Eq (6), where
τ is a pre-defined threshold value and
T
is a logical
AND operation. In Eq (6), D indicates the direction
of the edge. P (5), P (6) and P (9), P (10) are the one-
pixel shifted edges of P (3), P (4) and P (7), P (8) re-
spectively.
Figure 2 illustrates a comparison of the result of
edge detection using Canny edge detection (Canny,
1986) and the proposed method. The Canny opera-
tor has the feature of high precision localisation of a
single edge, but when the background of the scene is
complicated, too many edges will be detected. An ac-
curate result requires that well-matched thresholding
values be calculated, and this causes additional com-
putational complexity. The proposed edge detection
algorithm suffers sensitivity to noise and some edge
lines are disconnected due to noise and block-based
processing. Despite this, the proposed edge detection
algorithm has two advantages over Canny edge de-
tection: (1) it does not need to set critical threshold
values and to perform a filtering operation (instead
of using a filter, noise effects are eliminated via the
moving object detection algorithm described in Sec-
tion 3.3); (2) the block based approach provides for
memory efficiency and low complexity.
3.3 Moving Edge Detection
After edge detection, the blocks corresponding to
moving edges are determined. As an object moves in
the scene it covers and uncovers background around
its borders and possibly deforms. These phenomena
result in a change of the edge characteristics within
blocks on the object’s boundary. This can be used
to detect moving edge blocks from frame to frame.
There are 3 possibilities to consider: (1) edge to non-
edge (2) non-edge to edge (3) edge direction chang-
ing.
Within a frame differencing framework, the first
possibility above will result in ghost edges that should
be removed if they can be detected. In the ideal case,
the other possibilities above will result in real moving
edges but in practice there will be a lot of noise. To
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
514

(a) (b) (c)
Figure 2: (a) The 1500
th
frame of the dataset3 camera1 sequence of PETS2001; (b) edge detection using the Canny detector
with a high threshold of 190, a low threshold of 110 and a 3× 3 Sobel mask; (c) our proposed edge detection approach.
Figure 3: The example of P B M D between P (1) and other
patterns.
reduce the effect of noise, the history of the edge is
examined and processed in our proposed method. We
introduce the Pixel Bit Mask Difference (P B M D )
as an observation factor. P B M D is the number of
different bits between assigned edge patterns. It is
increased based on the strength of the noise that po-
tentially results in a bit change. P B M D can be cal-
culated as follows (where black and white pixels in
Figure 1 are set to 0 and 1 respectively):
P B M D =
∑
(u,v)∈{0,1}
P (i)
(u,v)
⊕ P ( j)
(u,v)
(7)
where ⊕ is a XOR bit operation, P (i)
(u,v)
, P ( j)
(u,v)
are mask bits of P (i) and P ( j). For example,
P B M D is calculated as ’1’ (meaning there is one bit
difference) between P (1) and P (3), P (6), P (8), P (9)
by comparing the pixel bit masks as shown in Fig-
ure 3. The P B M D between P (1) and P (0) (non-
edge block) should be controlled in a different way
by setting a maximum value of P B M D (i.e. by set-
ting α to ‘1’ as shown in Figure 3.
The differencing between edges in temporal se-
quences sometimes generates false alarms if edges
vary in the background. This is an inevitable con-
sequence of frame differencing methods. We intro-
duce a compensation method for false alarms using
the History Update Value (H U V ) based on P B M D .
H U V is observed at each frame and compared to the
P B M D to classify moving edges from all possible
candidate edges. When the current block has the same
edge pattern from the past frame, the H U V is zero.
This means that any edge pattern appearing in this
block except the same edge pattern from the previous
.
.
Static Candidate
Patterns
Moving Edge
Candidate Patterns
Figure 4: An example of detecting moving edges by observ-
ing the relationship between P B M D and H U V , B
i
m
is a
2×2 block m in the i
th
frame. β = 0.8.
frame is considered as a moving edge. On the con-
trary, the higher number of H U V represents much
noise existence from the past frames, only restricted
edge patterns are decided as a moving edge. H U V
can be obtained by using Eq (8). Figure 4 shows the
process to detect moving edges using P B M D and
H U V at β of 0.8. The 2x2 block is decided that has
a moving edge by comparing H U V in the previous
frame and the current P B M D .
H U V (i) = β × H U V (i− 1) + (1 − β) × P B M D (i)
(
P B M D (i+ 1) > H U V (i) moving block
P B M D (i+ 1) ≤ H U V (i) non moving block
(8)
where P B M D (i), H U V (i) are the P B M D and
H U V values of a block in the i
th
frame and β is a
weighted constant satisfying the condition β ∈ [0, 1].
In summary, the overall moving edge detection al-
gorithm can be explained as follows.
1. Obtain average pixel differences between frames
t and t − 1 (ZS
t
= (F(0, 0)
t
− F(0, 0)
t−1
)). If ZS
t
is larger than a pre-defined value (τ
⋆
), a block is
considered a candidate moving block, otherwise
non-moving block.
2. If ZS
t
> τ
⋆
, P B M D and H U V are calculated. If
P B M D (t) > H U V (t − 1), this block is consid-
ered as a moving block, the value of the H U V is
updated with Eq (8).
3. When moving edge blocks are obtained, moving
USING THE DISCRETE HADAMARD TRANSFORM TO DETECT MOVING OBJECTS IN SURVEILLANCE VIDEO
515

edge pixels are marked as the whole 2 × 2. This
has the effect of generating a sub-sampled moving
edge binary image.
Figure 5: (a) 520
th
, 530
th
, 540
th
frames of PETS2006
dataset; (b) edge map detected by the proposed method; (c)
moving edge extraction result; (d) region marking based on
moving edges; (e) AND operation between marked regions
and edges using Canny operator; (f) after morphological
closing.
The entire process is illustrated in Figure 5(a)–(c).
3.4 Post-Processing
After separating moving edges, we need to locate the
object so as to get the position and the shape of mov-
ing objects. We propose a simple three step procedure
to extract location and shape. All post-processing is
applied to the down sampled image obtained automat-
ically, leading to very efficient processing.
1. A 4 × 4 window scans the whole image in raster
scan order and finds a region containing moving
edges. Figure 5(d) shows how the marked region
area can contain missed moving edges.
2. There are many algorithms to fill a contour bound-
ary such as connected components algorithms and
neighbor searching. The proposed method uses an
AND operation performed between a marked re-
gion and the edges in the original image obtained
using a Canny operator. This does not generate
significant computational complexity since it acts
only on the marked region. The result is depicted
in Figure 5(e).
3. The morphologicalclosing operation is applied on
the moving edge binary mask to fill small missing
edges. Closing is able to eliminate salt and pepper
noise, narrow cracks, small holes and fill the gaps
in the contour. The closing of A by B, A • B =
(A⊕ B) ⊖ B, is simple dilation of A by B followed
by erosion of the result by B. Figure 5(f) shows
the output image after morphological closing.
4 EXPERIMENTAL RESULTS
Our experiments aimed at evaluating the moving ob-
ject detection algorithm’s ability to deal with illu-
mination changes, in avoiding ghost effects and as-
sessing its complexity. All processing is performed
on the Y component of the YUV signal. All tests
are performed on an Intel Core(TM)2 Duo 3.0GHz
with 2GB RAM using Window XP version 2002 with
service pack 2 written in ANSI C++. The pop-
ular and commonly available surveillance datasets,
namely CAVIAR
1
and PETS
2
, were used to evalu-
ate the performance of the proposed method. The
proposed method is compared with two frame differ-
encing low complexity methods. The first uses adap-
tive thresholding based on observing histograms as
described in (Otsu, 1979). The second is the edge-
based frame differencing and thresholding approach
of Chaohui (Chaohui et al., 2007). We qualitatively
illustrate our approach in Figure 6 using 3 different
scenarios. Figure 6(a) has no moving objects, and
only features luminance changes. Figure 6(b) shows
a moving object that has uniform luminance in its in-
ternal and boundary area, so that some edges do not
appear. Figure 6(c) represents a fast moving object
that generates the ghost effect. The simple frame dif-
ferencing approach suffers under luminance changes
and also introduces the ghost effect as seen in Fig-
ure 6(d). The edge based approach of Chaohui has
good quality compared to frame differencing, but it
also suffers false alarms due to variation of edges in
successive frames, as shown in Figure 6(e). The pro-
posed method gives good results with no false alarms
since our approach uses not only frame differencing
but also tracks the history of edges.
In order to have a quantitative evaluation of the
performance, we use recall and precision, to quantify
how well each algorithm matches the ground truth
suggested by Cheung and Kamath (Cheung and Ka-
math, 2004). To adapt the quantitative method to the
proposed method, we only compared moving edge
1
available at http://homepages.inf.ed.ac.uk/rbf/CAVIAR
2
available at http://www.cvg.rdg.ac.uk/slides/pets.html
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
516
pixels and not all object pixels. Our modified metric
can be defined by Eq (9)(10).
Recall =
# of moving edges detected in the ground truth
# of edge pixels in the ground truth
(9)
Precision =
# of moving edges detected in the ground truth
# of moving edges detected in a whole frame
(10)
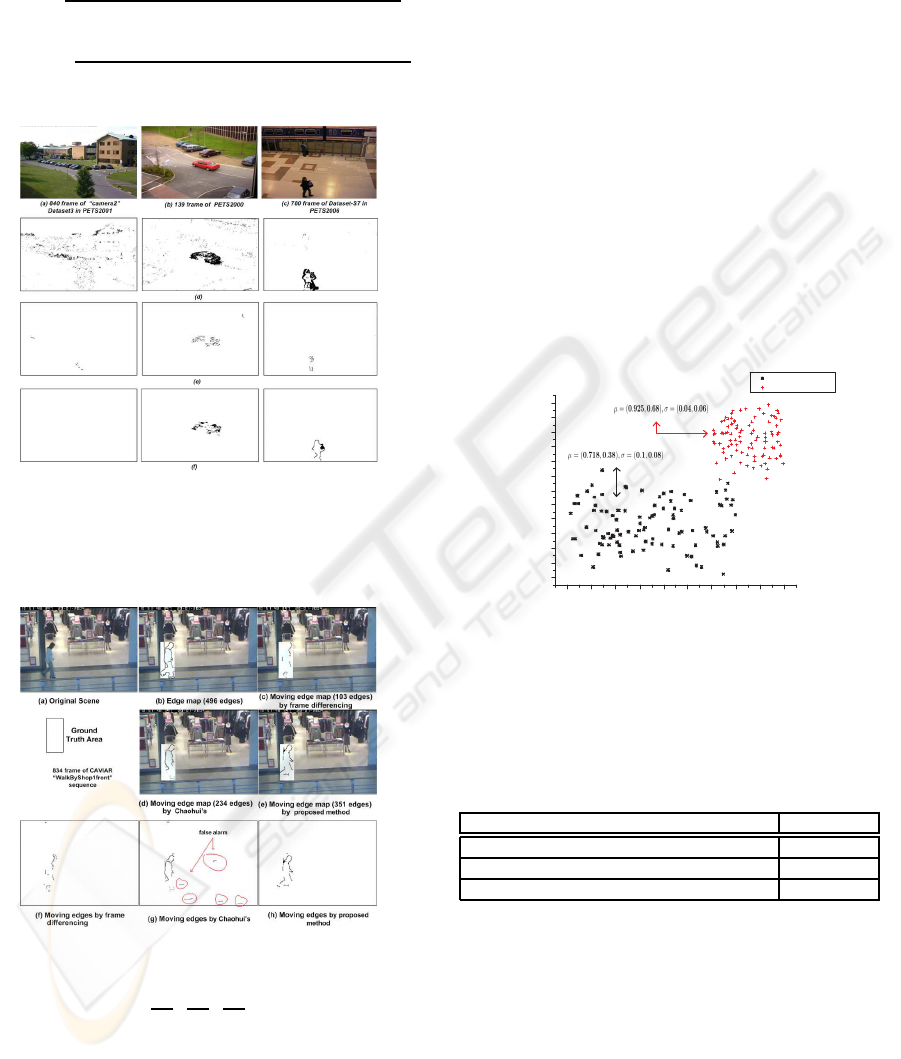
Figure 6: (a)(b) & (c) Sample test sequences used to illus-
trate performance for illumination changes, ghosting and
fast moving objects; (d) results based on frame differenc-
ing, threshold ; (e) Chaohui’s approach ; (f) the proposed
method.
Figure 7: (a) Original scene (b) Edge map detected by the
Canny detector in the ground truth; (c), (d) & (e) Moving
edges detected by (Otsu, 1979), (Chaohui et al., 2007) and
our method : recall =
103
496
,
234
496
,
351
496
(f), (g) & (h)Detected
moving edges in the entire frame for each approach.
For clarity, the evaluation process is illustrated in Fig-
ure 7 for the different moving object detection algo-
rithms considered. The ground truth region is high-
lighted Figure 7(b) and shows the edges generated
by the Canny edge detector within this region. The
frame differencing and thresholding method gener-
ates ghosts that produce multiple edges as shown
in Figure 7(f). This points to a potential problem
with our proposed Recall metric, whereby approaches
prone to ghost effects will results in artificially high
Recall values (due to the presence of more mov-
ing edges). For this reason, we exclude the sim-
ple frame differencing approach from the quantita-
tive evaluation and focus only on our method and
that of Chaohui. The calculated Recall is depicted in
Figure 7(c)(d)(e). Figure 8 shows Precision and Re-
call graphs for both approaches for 100 frames of the
CAVIAR sequence. The proposed method shows the
high performance(large µ) and independence of im-
age contents(small σ). The improvement of our ap-
proach over Chaohui’s is mainly due to the lack of
false alarms it produces – as is clearly illustrated in
Figure 7(g) & (h).
0.55 0.60 0.65 0.70 0.75 0.80 0.85 0.90 0.95 1.00
0.20
0.25
0.30
0.35
0.40
0.45
0.50
0.55
0.60
0.65
0.70
0.75
0.80
Chaohui's method
Proposed method
Recall
Precision
Figure 8: Recall and Precision for 100 frames of the
CAVIAR sequence; µ is a average value and σ is a standard
deviation.
Table 1: Performance analysis of the computational com-
plexity of different approaches. T is the total time(seconds)
for 500 frames.
Time (sec)
Frame differencing (Otsu, 1979) 5.4
Chaohui’s method (Chaohui et al., 2007) 2.4
The proposed method 1.1
Finally, we compare computational complexity with
Chaohui’s method. We use from the 830
th
to the
1229
th
frame (500 frames in total) of the “Walk-
ByShop1front” sequence of CAVIAR in 384 × 288
resolution. The proposed method shows higher de-
tection speed than other fast detection algorithms as
illustrated in Table 1. The improveddetection speed is
mainly as a result of the fact that the proposed method
uses an efficient edge detection algorithm rather than
other conventional approaches and the fact that post-
processing is performed on the down-scaled image.
USING THE DISCRETE HADAMARD TRANSFORM TO DETECT MOVING OBJECTS IN SURVEILLANCE VIDEO
517

5 CONCLUSIONS
In this paper, we present edge based moving ob-
ject detection using the Hadamard transform. The
Hadamard transform is a computationally efficient
tool because it consists of only subtractions and
adders. We propose a moving object detection al-
gorithm based on this new edge detection approach.
The edge pattern of a 2 × 2 block is classified by ob-
serving the coefficients of the Hadamard transform.
P B M D and H U V are defined in order to detect
moving blocks by observing the history of edges. The
block-based approach provides potential to save on
memory usage and data processing.
The proposed method targets reducing complex-
ity while addressing the main problems encountered
by frame differencing such as illumination changes
and ghost effects. We have followed this approach
since we believe that edge features are potentially su-
perior to other types of features – they are robust to
sudden illumination changes and computationally ef-
ficient because edge information is stored in binary
form. However, we acknowledge that the proposed
edge detection algorithm suffers discontinuity of edge
shape that mainly arises due to slow moving objects.
This could potentially be recovered by using the U
and V components based on a uniform colour as-
sumption for objects, and we plan to investigate this
in future work.
ACKNOWLEDGEMENTS
Authors would like to acknowledge the support of
Samsung Electronics and Science Foundation Ireland
under grant 07/CE/I1147.
REFERENCES
Archetti, F., Manfredotti, C. E., Messina, V., and Sorrenti,
D. G. (2006). Foreground-to-Ghost Discrimination
in Single-Difference Pre-processing. Advanced Con-
cepts for Intelligent Vision Systems.
Bruhn, A. Weickert, J. K. T. and Schnorr, C. (2006). A
multigrid platform for real-time motion computation
with discontinuity-preserving variational methods. In-
ternational Journal of Computer Vision, 70:255–277.
Canny, J. (1986). A computational approach to edge detec-
tion. IEEE Trans Patten Analysis and Machine Intel-
ligence, 8:679–698.
Cavallaro, A. and Ebrahimi, T. (2001). Change detection
based on color edges. In Circuits and Systems, 2001.
ISCAS 2001. The 2001 IEEE International Sympo-
sium on, volume 2, pages 141–144, Sydney, NSW,
Australia.
Chaohui, Z., Xiaohui, D., Shuoyu, X., Zheng, S., and Min,
L. (2007). An improved moving object detection al-
gorithm based on frame difference and edge detection.
In the Fourth International Conference on Image and
Graphics, pages 519–523.
Cheung, S. and Kamath, C. (2004). Robust techniques for
background subtraction in urban traffic. In Proc Elect
Imaging : Visual Comm Image Proc.
Costantini, R., Ramponi, G.and Bracamonte, J., Piller, B.,
Ansorge, M., and Pellandini, F. (2001). Countering il-
lumination variations in a video surveillance environ-
ment. SPIE proceedings, 4304:85–97.
Durucan, E. and Ebrahimi, T. (2000). Robust and illumi-
nation invariant change detection based on linear de-
pendence for surveillance applications. In European
signal processing conference, pages 1041–1044, Tam-
pere, Finland.
Jongcheol, K., Takumi, T., and Yasuo, S. (2005). Mov-
ing object detection using optical flow in mobile robot
with an omnidirectional camera. Nippon Robotto
Gakkai Gakujutsu Koenkai Yokoshu, 23:1B17.
Julius, H. M., Dewan, M., and Oksam, C. (2007). Moving
object detection for real time video surveillance: An
edge based approach. IEICE Transactions on Com-
munications, E90-B:3654–3664.
Otsu, N. (1979). A threshold selection method from gray
level histograms. IEEE Transactions on Systems,
Man, and Cybernetics, 9:62–66.
Radke, R. J., Andra, S., Al-Kofahi, O., and Roysam, B.
(2005). Image change detection algorithms: a system-
atic survey. IEEE Transactions on Image Processing,
14(3):294–307.
Shireen, Y., Elhabian Khaled, M., El-Sayed, and Sumaya,
H. A. (2008). Moving object detection in spatial do-
main using background removal techniques - state-of-
art. Recent Patents on Computer Science, 1:32–54.
Wang, H. and Suter, D. (2006). A novel robust statisti-
cal method for background initialization and visual
surveillance. In Asian conference on Computer Vision,
volume 3851/2006.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
518
