
PARALLEL IMPLEMENTATION OF A GLOBAL LINE MONTE
CARLO RADIOSITY
Roel Mart
´
ınez, Adri
`
a For
´
es and Ignacio Mart
´
ın
Institut d’Inform
`
atica i Aplicacions, Universitat de Girona, Campus de Montilivi, E-17071 Girona, Spain
Keywords:
Global illumination, Radiosity, Monte Carlo.
Abstract:
Radiosity methods are known by their expensive computational cost. To compute high quality images with a
lot of polygons or patches may take hours. For this reason parallel processing will be a good option in order
to decrease the computational cost. On the other hand, Monte Carlo methods offer good alternatives for paral-
lelization, given their intrinsic decomposition properties in independent subtasks. We have implemented our
multipath method for radiosity using a cluster of PCs. Results are presented for 1 to 8 processors, exhibiting a
good efficiency and scalability.
1 INTRODUCTION
Global illumination algorithms compute the single re-
flection of the light many times to simulate the multi-
ple reflections. To obtain a single reflection at a point
the estimate of the incoming radiance from a direction
should be weighted by the probability of the reflection
to a given direction and integrated taking into account
all the possible incoming directions. Consequently,
global illumination is basically a numerical integra-
tion problem. Thus global illumination is computa-
tionally very expensive, which means that in order to
obtain a high quality image, with a lot of polygons
or patches, may take hours. This high cost makes re-
searchers in the area to look into parallelization alter-
natives to reduce it (Reinhard et al., 1998).
Local Monte-Carlo approaches sample the do-
main of the integration randomly using a probability
density p, evaluate the integrand f (~x) here, and pro-
vide the f /p ratio as the primary estimate of the in-
tegral. This estimate is accurate if we can find p to
mimic f precisely, i.e. to make f /p as flat as possi-
ble. This strategy, which is commonly referred to as
importance sampling, places more samples where the
integrand is high. Since in practice p can be very far
from the integrand, the estimator may have high vari-
ance. Thus to get an accurate result many indepen-
dent primary estimators should be used and compute
the secondary estimator as their average.
Global Monte-Carlo methods do not rely on find-
ing good sampling density. Instead, they take advan-
tage of the fact that it is usually easy to evaluate the
f at a well structured set of sample points x
1
,. ..,x
n
.
The emphasis is on that the simultaneous computa-
tion of f (x
1
),. .., f (x
n
) is much cheaper that the indi-
vidual computation of f (x
1
),.. ., and f (x
n
) by a local
method, thus in this way we can have many more sam-
ples for the same computational effort. The bad side
of this technique is that, finding a probability den-
sity that simultaneously mimics the integrand at many
points is very difficult, thus practical methods usually
use uniform sampling probability. In this way, global
methods are implemented using global uniformly dis-
tributed lines, first used in (Buckalew and Fussell,
1989), in contrast with “local” lines, generated from
sampled points in the scene.
The multipath algorithm for radiosity (Sbert et al.,
1996; Sbert, 1997) is part of this family of global lines
algorithms which has seen a further development in
(Besuievsky and Pueyo, 1997; Szirmay-Kalos and
Purgathofer, 1998; Szirmay-Kalos, 1999; Bekaert,
1999; Mart
´
ınez, 2004).
On the other hand, task farm (or naive) Monte
Carlo parallelization is based on the fact that we can
decompose a Monte Carlo computation with n lines or
rays into m independent smaller ones with n/m rays
each with no loss in precision (Zareski et al., 1995;
Sbert et al., 1995; Alme et al., 1998).
We have implemented our parallel solution on a
cluster of PCs. We choose a high performance clus-
ter for decreasing the execution time of the radiosity
algorithm.
164
Martà nez R., ForÃl’s A. and Martà n I.
PARALLEL IMPLEMENTATION OF A GLOBAL LINE MONTE CARLO RADIOSITY.
DOI: 10.5220/0001801501640169
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-67-8
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
The rest of the paper is organized as follows. In
section 2 we present the radiosity multipath method.
In sections 3 and 4 we introduce the whole steps for
the sequential and parallel implementation of the mul-
tipath method, respectively. In section 5 we show our
results and finally we present our conclusions in sec-
tion 6.
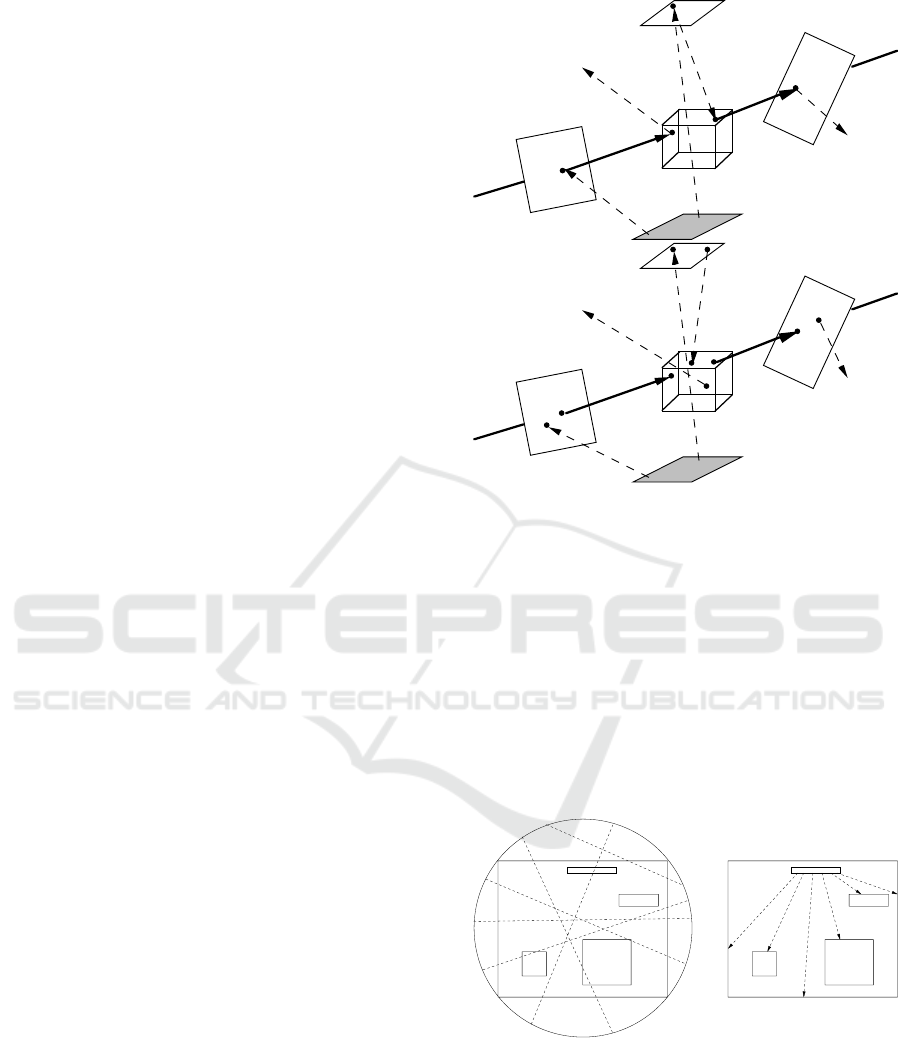
2 MULTIPATH METHOD
The multipath algorithm, described in (Sbert et al.,
1996; Sbert, 1997), uses segments of global lines to
build random walks that mimic classic random walks
with infinite path length (see figure 1). The main
differences as compared to the classic (local) ran-
dom walk approach is the source probability selec-
tion which is proportional to the area of the patch,
the simultaneous advance of different paths thanks to
global lines, and transporting different logical paths in
a single geometrical one. The first difference makes
it only efficient in “smoothed“ scenes, with emittance
occupying a large part of the scene and more or less
equilibrated. For this reason a first shot distributing
direct illumination before applying the algorithm is
necessary (Castro et al., 1998; Szirmay-Kalos et al.,
2000). First shot method uses Monte Carlo local
lines for the initial energy distribution from the light
sources (see figure 2, right). After the first shot execu-
tion, it runs the multipath algorithm that uses Monte
Carlo global lines to compute the light reflectances
(see figure 2, left).
The multipath algorithm casts a predetermined
number of random global lines using for instance, ran-
dom points on an enclosing sphere. Each line will
produce an intersection list, and the list is traversed
taking into account each successive pair of patches
(see figure 3). Each patch (if not emitter) stores two
quantities. One records the power accumulated, and
the other the unshot power. For every pair of patches
along the intersection list, the first patch of the pair
will transmit its unsent power to the second patch of
the pair. So the unshot energy of the first patch is reset
to zero, and the two quantities at the second patch, the
accumulated and the unsent energy, are incremented.
In the case of a source a third quantity i.e., the emitted
power per line exiting the source is also kept. This
power is precomputed in the following way: Given
the number of lines to cast, the forecast number of
lines passing through any source is found. This can
be done with the Integral Geometry methods (San-
tal
´
o, 1976). The division of the total source power
by this number of forecast lines gives the predicted
power of one line. Then, if the first patch of a pair
Source
Source
Figure 1: Random walk simulation with global lines. Top
image, a global line (the thick continuous one) makes two
paths advance at once (using previous global lines). Con-
sidering bidirectionality of the global lines, two other paths
(cube surface and the more left polygon) will also advance
in the reverse direction of the line. Down image, the exit
point on each surface is random but the random walk simu-
lation is still the same.
is a source patch, the power transported to the sec-
ond patch of the pair will also include this predicted
power portion. Considering bidirectionality, the same
process is applied for the second patch of the pair of
face to face patches.
Figure 2: From left to right, global line and local line
Monte Carlo methods. Global lines are cast from a bound-
ing sphere and all intersections, that the line made with the
scene, are considered. Local lines are cast from a patch and
just the first intersection, that the line made with the scene,
is considered.
PARALLEL IMPLEMENTATION OF A GLOBAL LINE MONTE CARLO RADIOSITY
165
A
B
P4
P3
P2
P1
P4
P3
P2
P1
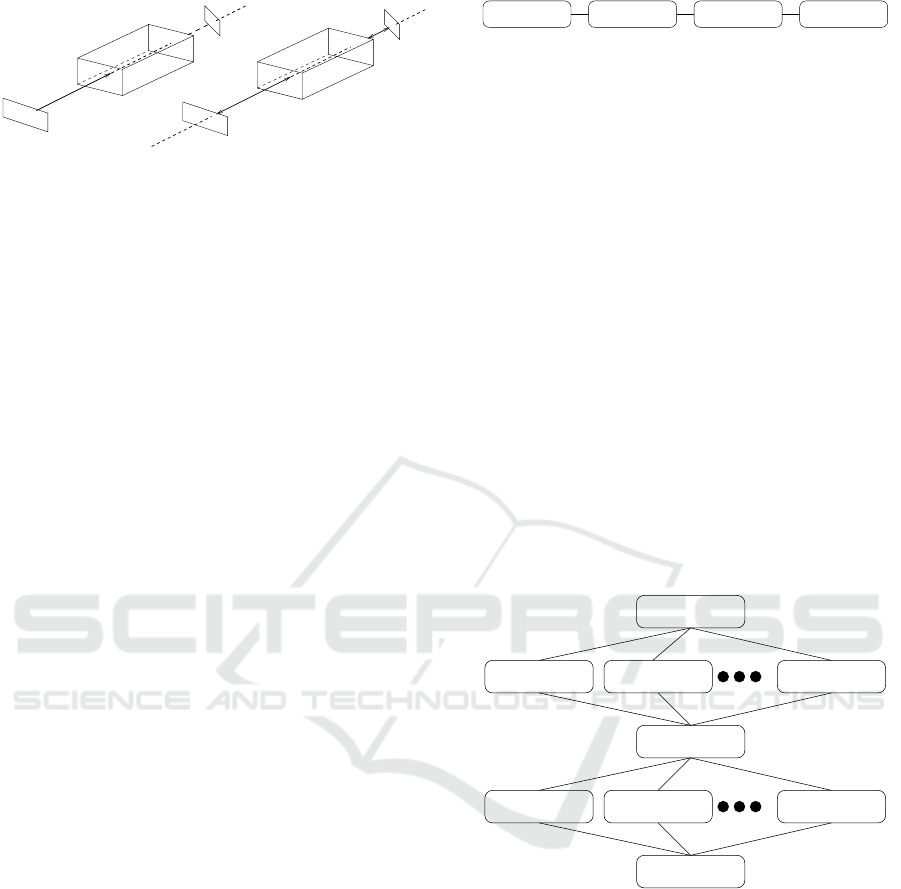
Figure 3: From left to right, the local line goes from the
emitter patch to the first intersection of the line, there is
a unidirectional energy sent from P1 to patch P2. On the
right, the global line AB will transport power from patch
P1 to P2 and from patch P3 to patch P4. There is no energy
exchange between P2 and P3 because the related segment is
inside an object. Considering bidirectionality, the line will
also transport power from P2 to P1 and from P4 to P3.
3 SEQUENTIAL
IMPLEMENTATION
The sequential implementation first reads the scene
geometry and then the scene is subdivided in patches.
Second, the first shot step, with a predefined, by the
user, number of lines, is computed. Third, the multi-
path method, with predefined number of lines, is ap-
plied. Finally, the resulting scene is saved. This is
summarized in figure 4. The first shot step and the
multipath method are given by the following pseu-
docode:
begin firstShot()
for i=0 to total number of patches do
if patch[i] is a source then
compute number of rays for this source
according to its power
for j=0 to number of rays do
cast a local line // see figure 2
transfer energy from the source to
the first intersected patch
endFor
endIf
endFor
end
begin multipath()
create a bounding sphere for the whole scene
for i=0 to total number of rays do
cast a global line // see figure 2
compute all intersections
for all intersections do
// see figure 3
exchange power between pair of patches
endFor
endFor
end
It is easy to see that the more consuming parts,
in our sequential implementation, are the firstShot
and multipath steps. The idea is then to execute both
functions in parallel.
read scene data first shot multipath write results
Figure 4: Sequential algorithm scheme of our radiosity im-
plementation.
4 PARALLEL
IMPLEMENTATION
In our parallel implementation we have two regions
in our code: the sequential region and the parallel re-
gion. In our case the parallel region is given by the
first shot step and the multipath method. Every cluster
node has its own copy of the scene data and radiosity
solution vector. Thus, every node computes its own
solution of the first shot step and multipath method
according to the code explained in previous section.
The sequential region is given by three sections. The
first section is loading the data at the beginning of the
process. The second one is the combination of the
results after the first shot and the distribution of this
result to all the nodes. And the third one is the compu-
tation of the final results at the end of the process. In
figure 5 we can see how all these tasks are structured
in our implementation.
read scene data
first shot first shot
combine results
first shot
write results
combine and
multipath multipath multipath
Figure 5: Parallel algorithm scheme of our radiosity imple-
mentation.
The tasks for each node is balanced because the
predefined number of rays is divided by the number
of processors. The cost of every line depends of the
number of intersections. In the case of local lines the
cost is more less the same but for global lines the cost
can be very different. Considering that a scene needs
millions of global lines then the average intersection
cost will be almost the same at the end of the process.
On the other hand, the sequential cost depends of
the communication cost plus the master node CPU
time. Our communication cost is very low because
there are just two communications steps in our imple-
mentation: one is bidirectional and the other one is
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
166
unidirectional. The bidirectional communication pro-
cess is used after the first shot step. The result of each
node is sent to the master node and this node com-
bines them. The final result is then sent back to each
node in order to use this result as an initial values of
the multipath method. The unidirectional communi-
cation step is applied at the end of the process. The
task of combining the results is simple. The master
node CPU has to add, for every scene patch, all the
radiosity results and divide them by the number of
processors. Thus the execution time, in the master
node, is proportional to the number of patches.
5 RESULTS
We have used a high performance cluster composed
by four servers HP ProLian DL145, each server has
two AMD Opteron 244 (1.8GHz) processors and 2GB
of RAM memory. Also a 100Mbps network switch is
used. The cluster has been configured with OSCAR
(Open Source Cluster Application Resources) on a
GNU/Linux Suse 10.0 OS. We did our implementa-
tion in C++ using the SIR architecture (see (Martin
et al., 1998)) and LAM/MPI (Message Passing Inter-
face) libraries. We tested our implementation with the
museum stairs and airplane cabin scenes (see figures
8 and 9).
Speed-up and Efficiency are measures that indi-
cate how well a program has been parallelized. Let
T (p) be the execution time in p CPUs. The Speedup
S(p) and Efficiency E(p) are defined as:
S(p) =
T (1)
T (p)
p = 1, 2,3...n
E(p) =
S(p)
p
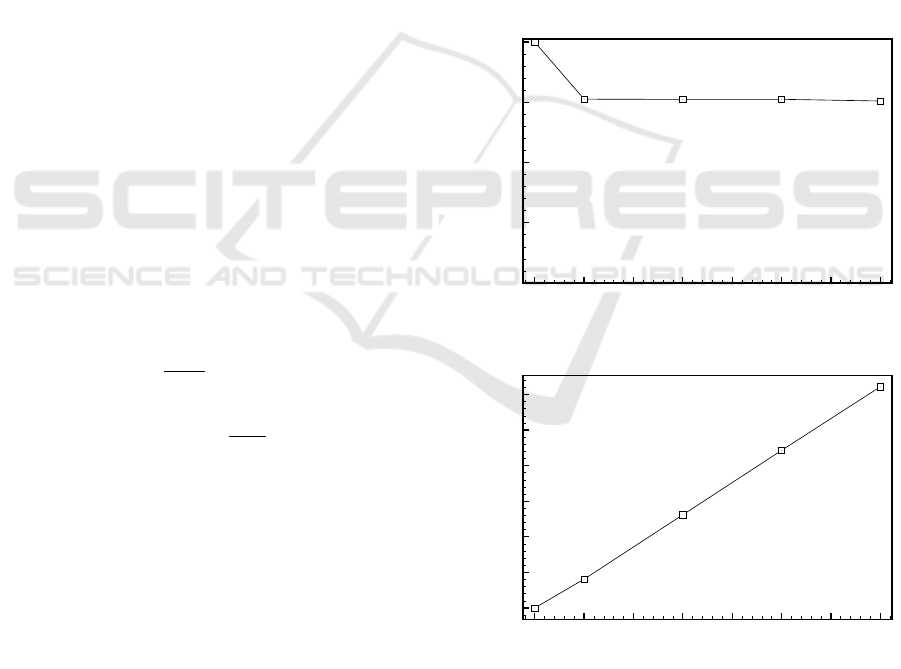
Figures 6 and 7 show the speed-up and efficiency,
respectively, of our parallel implementation, for the
museum stairs scene in figure 8. We can see that
the speed-up keeps around 90% for different number
of CPUs. Scalability shows that the efficiency E(p)
remains constant over a large number of processors.
Following this idea, we can see that our implementa-
tion has a good scalability.
According to our experiments, in order to get a
better result, the best proportion is 50% of local lines
and 50% of global lines. But it is important to note
that the bounding sphere volume is around 30% big-
ger than the bounding box volume of the scene. It
means that 30% of the global lines will not intersect
any scene polygon because are passing through an
”empty” space.
The museum stairs scene was subdivided in
614.778 patches and 100 million rays for the first shot
step and 130 million for the multipath method were
cast. The execution time using the sequential imple-
mentation was 1346.4 seconds (484.7 seconds for the
first shot and 861.7 for the multipath method) and for
our parallel implementation, using 8 CPUs, was 189.5
seconds (70.2 seconds for the first shot and 119.3 for
the multipath method).
The airplane cabin scene was subdivided in
438.518 patches and 100 million rays for the first shot
step and 130 million for the multipath method were
cast. The execution time for the sequential and paral-
lel implementation was 951.3 (337.7 seconds for the
first shot and 613.6 for the multipath method) and
130.5 seconds (47 seconds for the first shot and 83.5
for the multipath method), respectively. This scene
shows similar speed-up and efficiency than the mu-
seum stairs scene.
1 2 3 4 5 6 7 8
CPU count
0.6
0.7
0.8
0.9
1
Efficiency
Figure 6: Efficiency for the museum stairs scene in figure 8.
1 2 3 4 5 6 7 8
CPU count
1
2
3
4
5
6
7
Speedup
Figure 7: Efficiency for the museum stairs scene in figure 8.
PARALLEL IMPLEMENTATION OF A GLOBAL LINE MONTE CARLO RADIOSITY
167

Figure 8: Museum stairs scene (a view from the top) with
614.778 patches computed using 100 million rays for the
first shot step and 130 million for the multipath method.
Figure 9: Airplane cabin scene with 438.518 patches com-
puted using 100 million rays for the first shot step and 130
million for the multipath method.
6 CONCLUSIONS
We have presented a parallel implementation of the
multipath method for radiosity. The implementation
has been done in a cluster of PCs. Tests have been
done for 2 to 8 processors, showing good efficiency
and scalability.
As future work is possible to implement other re-
lated global line Monte Carlo algorithms. Also, other
architectures, like multicore shared memory, are a
good option for Monte Carlo methods.
ACKNOWLEDGEMENTS
This project has been funded in part with grant num-
ber TIN2007-68066-C04-01 of the Spanish Govern-
ment.
REFERENCES
Alme, H., Rodrigue, G., and Zimmerman, G. (1998). Do-
main decomposition methods for parallel laser-tissue
models with monte carlo transport. In Niederreiter,
H. and Spanier, J., editors, Proceedings of the Third
International Conference on Monte Carlo and Quasi-
Monte Carlo methods in Scientific Computing, Clare-
mont, California, USA. Springer-Verlag.
Bekaert, P. (1999). Hierarchical and Stochastic Algo-
rithms for Radiosity. PhD thesis, Department of Com-
puter Science, Katholieke Universiteit Leuven, Leu-
ven, Belgium.
Besuievsky, G. and Pueyo, X. (1997). Making Global
Monte Carlo Methods Useful: An Adaptive Approach
for Radiosity. In Actas VII Congreso Espa
˜
nol de In-
form
´
atica Gr
´
afica (CEIG ’97), Barcelona, Spain.
Buckalew, C. and Fussell, D. (1989). Illumination Net-
works: Fast Realistic Rendering with General Re-
flectance Functions. In Computer Graphics (ACM
SIGGRAPH ’89 Proceedings), volume 23, pages 89–
98.
Castro, F., Mart
´
ınez, R., and Sbert, M. (1998). Quasi-
monte carlo and extended first-shot improvement
to the multi-path method. In Szirmay-Kalos,
L., editor, Proc. Spring Conference on Com-
puter Graphics ’98, pages 91–102, Budimerce,
Slovakia. Comenius University. Available from
http: //www.dcs.fmph.uniba.sk /˜sccg/ proceedings/
1998.index.htm.
Martin, I., Perez, F., and Pueyo, X. (1998). The SIR Render-
ing Architecture. Computers & Graphics, 22(5):601–
609.
Mart
´
ınez, R. (2004). Adaptive and Depth Buffer Solutions
with Bundle of Parallel Rays for Global Line Monte
Carlo Radiosity. PhD thesis, Universitat Polit
`
ecnica
de Catalunya, Barcelona, Spain. Available from
http://ima.udg.es/˜roel.
Reinhard, E., Chalmers, A. G., and Jansen, F. W.
(1998). Eurographics ’98 State of the Art
Reports, chapter Overview of Parallel Photo-
Realistic Graphics, pages 1–25. Available from
http: // www.cs.bris.ac.uk /Tools /Reports /Authors /
alan.html.
Santal
´
o, L. A. (1976). Integral Geometry and Geometric
Probability. Addison-Wesley, New York.
Sbert, M. (1997). The Use of Global Random Direc-
tions to Compute Radiosity: Global Monte Carlo
Techniques. PhD thesis, Universitat Polit
`
ecnica
de Catalunya, Barcelona, Spain. Available from
http://ima.udg.es/˜mateu.
Sbert, M., Perez, F., and Pueyo, X. (1995). Global Monte
Carlo: A Progressive Solution. In Hanrahan, P. M. and
Purgathofer, W., editors, Rendering Techniques ’95
(Proceedings of the Sixth Eurographics Workshop on
Rendering), pages 231–239, New York, NY. Springer-
Verlag.
Sbert, M., Pueyo, X., Neumann, L., and Purgathofer, W.
(1996). Global Multipath Monte Carlo Algorithms for
Radiosity. The Visual Computer, 12(2):47–61.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
168

Szirmay-Kalos, L. (1999). Stochastic Iteration for Non-
Diffuse Global Illumination. In Computer Graphics
Forum ( Proceedings Eurographics ’99), volume 18,
pages C–233–C–244.
Szirmay-Kalos, L. and Purgathofer, W. (1998). Global Ray-
Bundle Tracing with Hardware Acceleration. In Dret-
takis, G. and Max, N., editors, Rendering Techniques
’98 (Proceedings of Eurographics Rendering Work-
shop ’98), pages 247–258, New York, NY. Springer
Wien.
Szirmay-Kalos, L., Sbert, M., Mart
´
ınez, R., and Tobler,
R. F. (2000). Incoming First-Shot for Non-Diffuse
Global Illumination. In Spring Conference on Com-
puter Graphics, Budmerice, Slovakia. Available from
http://www.fsz.bme.hu/˜szirmay/puba.htm.
Zareski, D., Wade, B., Hubbard, P., and Shirley, P. (1995).
Efficient parallel global illumination using density es-
timation. In Proceedings of Visualization ’95 - Paral-
lel Rendering Symposium, pages 219–230.
PARALLEL IMPLEMENTATION OF A GLOBAL LINE MONTE CARLO RADIOSITY
169
