
LASER RANGE DATA REGISTRATION USING SPIN IMAGES
Xavier Mateo Prous
Department of Computer Science, Universitat Aut`onoma de Barcelona, Bellaterra, Spain
Xavier Binefa Valls
Department of Information Technologies and Communications, Universitat Pompeu Fabra, Barcelona, Spain
Keywords:
Spin images, Iterative closest point, Laser range scanner, Registration.
Abstract:
Registration of laser range data becoming from different scanner positions is still a current topic in literature.
In this paper we introduce the possibility of solving it by using spin images, which create a 2D image for
every 3D coordinate vertex in the scans. Matching between spin images allows the estimation of an initial
rigid transformation between the scans, which later can be refined with ICP process in order to achieve a more
accurate registration.
1 INTRODUCTION
Laser range scanning has become a quite popular sys-
tem for the capture of 3D environments. The possibil-
ity of combining both the 3D representation obtained
from the laser and a visible/infrared camera to apply a
texture to the three-dimensional model achieves a pre-
cise representation of huge scenes with a minimum
effort.
One of the most encouraging challenges in this
kind of images is the possibility of register differ-
ent scans becoming from different unknown points of
view, achieving in this way a more wide representa-
tion and the filling of laser range shadows produced
by the reflection in the objects.
The usual way to achieve this pairwise registra-
tion is the so-called Iterative Closest Point (ICP) (Besl
and McKay, 1992), which performs an iterative pro-
cess in order to minimize the mean square distance
between two sets of 3D points. Nowadays, this algo-
rithm and its different derivatives (Rusinkiewicz and
Levoy, 2001) are still the most usual and effective
ways to achieve our objective. The main problem for
this algorithm is the necessity of a good initialization
if we desire that the iterative process converges to a
global minimum and not to a local minimum.
The obtaining of this initialization becomes the
main problem in most of the existing literature. Some
approaches use a simple combination of a GPS and
a Inertial Measurement Unit (IMU) (Madhavan and
Messina, 2003; Hsu et al., 2003) in order to obtain
both the position and orientation of the laser scanner
in every scanning process. This method provide on
one side the simplicity thanks to the non-existence
of complicated algorithms, but on the other side be-
comes ineffective in indoor applications or places
where the GPS signal cannot be reachable.
More recent approaches make use of the informa-
tion obtained from the visible camera attached to the
laser scanner, extracting information from the more
well-known and deeply studied 2D images process-
ing. The basic idea is to obtain characteristic key-
points from the visible images, and later achieve the
matching between the keypoints using the SIFT de-
scriptor (Lowe, 2004). Once this matching has been
finished, and assuming that the visible camera and the
laser range scanner are perfectly calibrated, we can
convert this 2D-pixel-matching in 3D-coordinates-
matching, and achieving the desired pairwise registra-
tion. Main problem of this approach is that the match-
ing of SIFT descriptors is capable to cope with small
differences is the viewpoint, but not with high differ-
ences in position as could be our case of study. Some
solutions arise to this problem making use of the 3D
information from the laser scanner (Seo et al., 2005;
Smith et al., 2008), estimating the normal of the 3D
coordinate in the real world and performing an ho-
mography of the visible image as it would be seen
from the front side of the keypoint.
Our model is based also in the use of a descriptor,
541
Mateo Prous X. and Binefa Valls X. (2009).
LASER RANGE DATA REGISTRATION USING SPIN IMAGES.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 541-545
DOI: 10.5220/0001803005410545
Copyright
c
SciTePress
but this time in the 3D descriptor called spin image.
The descriptor is able to compute a 2D image for ev-
ery 3D coordinate taking into account the projection
of the other 3D coordinates in its proximity. The main
benefit from this approach is the computation of the
process only using the 3D information from the laser
scanner and therefore the non-necessity of a calibra-
tion of the visible camera with the range scanner.
The structure of the document is as follows: in
Section 2 we see a review of spin images, which al-
lows a good compression of our model in Section 3.
Experimental results are explained in Section 4 and
finally conclusions and future work can be found in
Section 5.
2 SPIN IMAGES
Spin images were initially developed during the PhD
thesis of Andrew Edie Johson under the supervision
of Martial Hebert (Johnson, 1997). Later they apply
the algorithm to different cases of 3D recognition and
matching (Johnson and Hebert, 1998; Johnson and
Hebert, 1999). Nowadays they are quite used in facial
recognition (Li et al., 2006) and 3D object recognition
(Assfalg et al., 2007; Matzka et al., 2007).
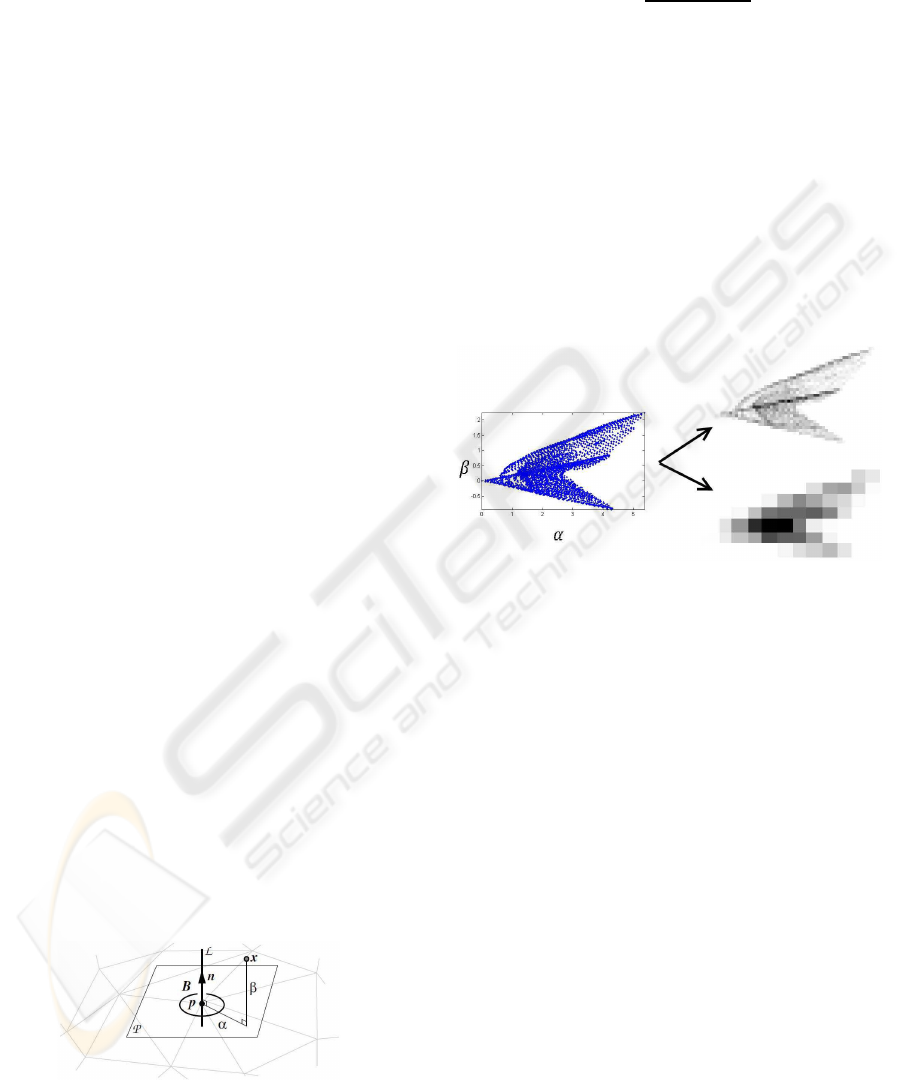
Basic idea of the spin images is to represent the
proximity structure for every 3D point in a surface or
object. First step for its computation is the estimation
of the surface normal for everypoint we want to create
the spin image. Combination of the 3D point with its
normal vector is called oriented point. The oriented
point defines a plane and also a cylindrical coordinate
system. Two coordinates can then be defined: a ra-
dial coordinate α and an elevation coordinate β. α
defines the distance of every point in the proximity
to the line defined by the oriented point, and β de-
fines the distance of every point to the tangent plane
defined by the oriented point. Their graphical repre-
sentation is shown in Figure 1, where p represents the
3D point that we want to create the spin image, n its
normal vector and x represents one of its proximity
neighbors.
Figure 1: Generation of spin image at oriented point p.
β = (x− p) ·n (1)
α =
q
(x− p)
2
− β
2
(2)
Once all the points in the proximity have been pro-
jected to the plane we obtain a 2D image with a cluster
of dots. At this point the second step of the spin im-
age generation starts: the 2D image can be seen as an
accumulator, resulting in darker areas where the ac-
cumulation of points is higher and lighter areas where
the accumulation is lower. For this accumulation re-
sult we must previously define a bin size, defined as
the geometric width of the bins in the spin image.
The final result of the spin image should be a gray-
level image normalized between 0 (white color) and 1
(black color).
Figure 2: Dependence of bin size in the spin image.
Spin images from two different scans representing
the same object will be similar but not exactly, so in
order to compute the possible matching between two
spin images we can use a simply correlation coeffi-
cient. The higher the correlation coefficient, the more
probable that both points represent the same vertex in
the object or surface.
3 REGISTRATION PROCESS
As mentioned, basis of our system is the generation
of spin images. Anyway, due to computational cost
is not advisable to generate a spin image for every
3D vertex in the two scans, so some kind of charac-
teristic points selection is needed. Main advantage
of our system is that it does not require the informa-
tion of the visible camera to achieve the registration.
For this reason we can simply use the range image or
the reflectance image of the range scanner, which are
perfectly registered with the 3D scan since they are
captured at the same time as the 3D scan. We can use
also the visible camera image, but taking into account
that probably the calibration would not be so exact.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
542

Figure 3: Visible image, reflectance image and range image.
For our study case we use the reflectance image
of the two laser range scans, where we apply a key-
point detector in order to find a group of characteris-
tic points. We implemented it with a Harris detector
(Harris and Stephens, 1988), but other keypoint de-
tectors can be used (Lowe, 2004; Mikolajczyk and
Schmid, 2005).
Once the keypoints from both images are selected,
we can compute the spin image of every 3D coordi-
nate associated to the keypoints. As probably both
scans will have a huge extension, we limit the gen-
eration of the spin image using only 3D coordinates
that are at a distance lower than 5 meters. With this
restriction we achieve a spin image that represents the
local structure of the feature independently to the rest
of the laser scan.
Matching between the spin images is carried out
with a simple correlation factor. Every spin image
of a scan are compared with all the spin images of
the other scan, and those that overcome a correlation
threshold (0,6 in our experiments) are selected as pos-
sible correspondences. With all the possible corre-
spondences between both scans in hand, we should
still find the higher group of correspondences that are
geometrically consistent. We apply the algorithm ex-
plained in (Johnson and Hebert, 1998), where the con-
sistency is evaluated through the Geometric Consis-
tency Distance (W
gc
). After applying the algorithm
the group with more elements will be considered as
the most probable one, and the rigid transformation
T from scan A to scan B is calculated by minimizing
the error considering all the correspondences of the
chosen group.
min
∑
ka
i
− T(b
i
)k
2
(3)
Finally, in order to accurately register both scans,
the ICP process is applied. Since the initialization
should be good enough the process converge to a
global minimum and the final registration will im-
prove the previous result.
4 EXPERIMENTAL RESULTS
The experiments have been carried out with two scans
captured with a laser scanner Riegl LMS-Z420i. Both
scans capture a similar portion of a scene, containing
walls, vegetation and vehicles. Dates of capture were
different, so there is no correlation between the vehi-
cles. The positions of the scans are lightly displaced,
and also with a difference in elevation. Both scans can
be seen in Figures 4 and 5. Also, for a better scene un-
derstanding, the associated visible images are shown.
Figure 4: Scan A and its associated visible image.
Figure 5: Scan B and its associated visible image.
Execution of the different steps presented in this
paper lead us to 542 possible correspondences be-
tween the spin images. After the geometric consis-
LASER RANGE DATA REGISTRATION USING SPIN IMAGES
543
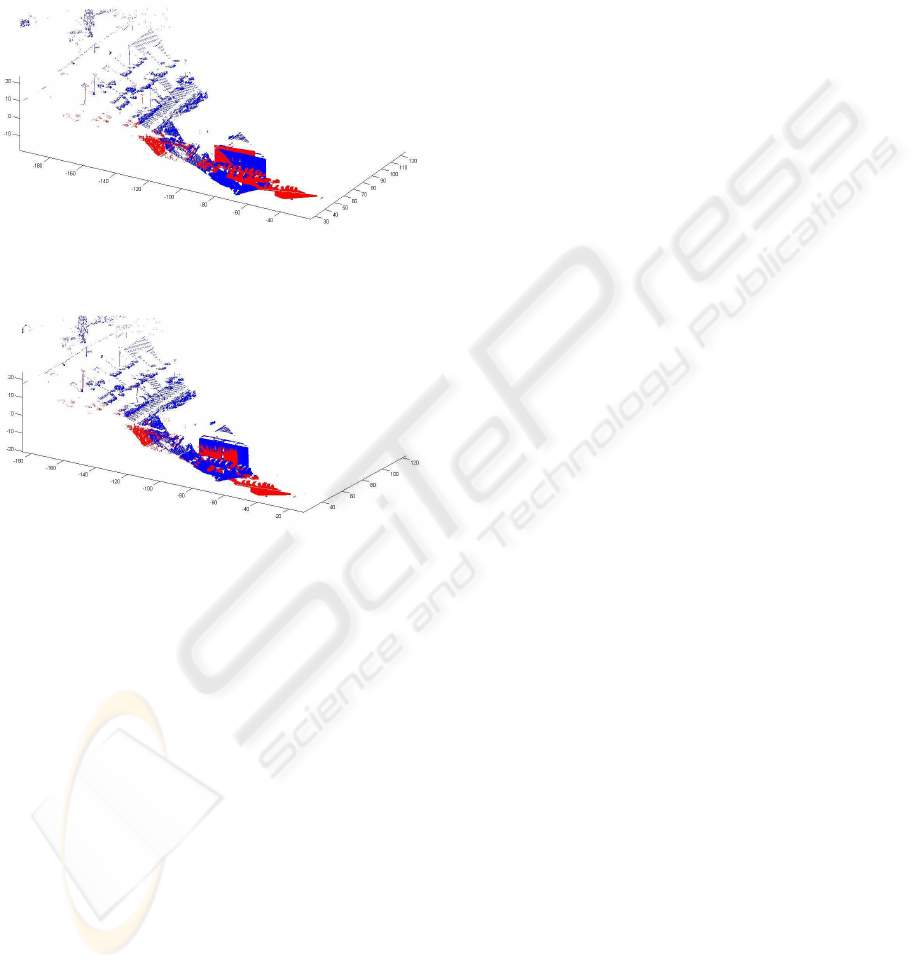
tency grouping, the group with more correspondences
is selected (167 correspondences) and the rigid trans-
formation is calculated. Result can be seen in Figure
6. As expected, result can have some minor errors, so
the Iterative Closest Point algorithm is applied in or-
der to refine the registration. Final result with a more
accurate registration can be seen in Figure 7.
Figure 6: Registration result after the matching grouping.
Figure 7: Final registration result after the ICP process.
5 CONCLUSIONS AND FUTURE
WORK
This paper explains the initial developments of an al-
gorithm to achieve the pairwise registration between
laser range scans taken from different unknown posi-
tions. The registration is based in the computation of
the spin images for different specific 3D coordinates
and the later matching between them using a simple
correlation factor.
Use of spin images allows us the possibility of
working directly with the 3D data and evaluate, for
every 3D coordinate, the relationship with the other
3D coordinates in the proximity. In addition, the pro-
cessing of the visible image in order to find an initial
approximation is not mandatory and all the process-
ing can be done only with the information obtained
from the laser scanner.
Following steps in this study will be the detec-
tion, directly in the 3D surface, of specific typical
forms: planes (useful for buildings and walls), cylin-
ders (for trees, streetlight or traffic lights) or any other
forms that could be representativefor different objects
present in typical scenarios. The detection of these
typical forms will allow a filtering of non-static ob-
jects (e.g. cars) and thus a better registration between
the 3D points sets. Of course spin images could be re-
ally helpful for this purpose, as they can represent the
local distribution of the 3D coordinate and its neigh-
borhood.
ACKNOWLEDGEMENTS
This work was produced thanks to the support of the
Universitat Aut`onoma de Barcelona (UAB) and the
Centro de Investigaci´on y Desarrollo de la Armada
(CIDA)
REFERENCES
Assfalg, J., Bertini, M., Bimbo, A. D., and Pala, P. (2007).
Content-based retrieval of 3-d objects using spin im-
age signatures. In IEEE Transactions on Multimedia.
Besl, P. J. and McKay, N. D. (1992). A method for registra-
tion of 3-d shapes. In IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. In Proceedings of The Fourth Alvey
Vision Conference.
Hsu, S., Samarasekera, S., and Kumar, R. (2003). Auto-
matic registration and visualization of occluded tar-
gets using ladar data. In Proceedings on SPIE Laser
Radar Technology and Applications.
Johnson, A. E. (1997). Spin-images: A representation for 3-
d surface matching. In Doctoral dissertation, tech. re-
port CMU-RI-TR-97-47, Robotics Institute, Carnegie
Mellon University.
Johnson, A. E. and Hebert, M. (1998). Surface matching for
object recognition in complex 3-d scenes. In Image
and Vision Computing.
Johnson, A. E. and Hebert, M. (1999). Using spin images
for efficient object recognition in cluttered 3d scenes.
In IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence.
Li, Y., Smith, W. A., and Hancock, E. R. (2006). Face
recognition using patch-based spin images. In Inter-
national Conference on Pattern Recognition.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. In International Journal of Com-
puter Vision.
Madhavan, R. and Messina, E. (2003). Iterative registra-
tion of 3d ladar data for autonomous navigation. In
Proceedings of the IEEE Intelligent Vehicles Symp.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
544

Matzka, S., Petillot, Y. R., and Wallace, A. M. (2007). De-
termining efficient scan-patterns for 3-d object recog-
nition using spin images. In Advances in Visual Com-
puting.
Mikolajczyk, K. and Schmid, C. (2005). A performance
evaluation of local descriptors. In IEEE Transactions
on Pattern Analysis and Machine Intelligence.
Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants
of the icp algorithm. In International Conference on
3-D Digital Imaging and Modeling.
Seo, J. K., Sharp, G. C., and Lee, S. W. (2005). Range data
registration using photometric features. In Computer
Vision and Pattern Recognition.
Smith, E. R., King, B. J., Stewart, C. V., and Radke,
R. J. (2008). Registration of combined range-intensity
scans: Initialization through verification. In Computer
Vision and Image Understanding.
LASER RANGE DATA REGISTRATION USING SPIN IMAGES
545
