
COMPLEXITY REDUCTION OF REAL-TIME DEPTH SCANNING
ON GRAPHICS HARDWARE
Sammy Rogmans
1,2
, Maarten Dumont
1
, Tom Cuypers
1
, Gauthier Lafruit
2
and Philippe Bekaert
1
1
Hasselt University – tUL – IBBT, Expertise centre for Digital Media, Wetenschapspark 2, 3590 Diepenbeek, Belgium
2
Multimedia Group, IMEC, Kapeldreef 75, 3001 Leuven, Belgium
Keywords:
Complexity reduction, Real-time, Depth scan, Graphics hardware.
Abstract:
This paper presents an intelligent control loop add-on to reduce the total amount of hardware operations – and
therefore the resulting execution speed – of a real-time depth scanning algorithm. The analysis module of the
control loop predicts redundant brute-force operations, and dynamically adjusts the input parameters of the
algorithm, to avoid scanning in a space that lacks the presence of objects. Therefore, this approach reduces
the algorithmic complexity in proportion with the amount of void within the scanned volume, while remaining
fully compliant with stream-centric paradigms such as CUDA and Brook+.
1 INTRODUCTION
For many years, depth map estimation has been an
active research topic to progressively drive a vast
amount of applications such as robot navigation, im-
mersive teleconferencing and 3DTV with autostereo-
scopic displays. Although depth information can be
derived in a variety of ways, when real-time perfor-
mance is considered, many researchers still tend to
prefer local algorithms instead of global optimization
schemes. The reason is that local algorithms are data-
parallel and can therefore be highly accelerated by
many-core platforms such as the Graphics Process-
ing Unit (GPU). However, these algorithms often re-
sort to brute-force approaches, resulting in a large
amount of redundant operations. Although real-time
performance is still achieved, the redundant brute-
force operations significantly suppress the high-speed
and low-power potential of these local algorithms.
This paper presents an intelligent control loop
add-on to reduce the intrinsic complexity of real-time
depth scanning algorithms, overcoming their ‘unin-
telligent’ brute-force approach. The algorithms their-
selves remain completely unaltered by predicting the
redundant operations in advance, while dynamically
changing the input parameters similar to a regulator
in control systems. The proposed approach is there-
fore compliant with stream-centric paradigms such as
CUDA and Brook+, but also with fixed-functionality
hardware (e.g. ASICs).
The layout of the paper is as follows: Section 2 ex-
plains the principles of depth scanning, and presents
the reader with a complexity analysis of one of the
currently most promising state-of-the-art local algo-
rithms. Consequently, Section 3 describes the control
loop add-on to reduce the total algorithmic complex-
ity, while Section 4 exposes optimization schemes
that can be applied specifically on the GPU. The re-
sults are discussed in Section 5, and the paper is con-
cluded in Section 6.
2 DEPTH SCANNING
In the most general case, local algorithms determine
depth information by sweeping a plane through the
3D volume (Yang et al., 2002), checking each voxel
(i.e. pixel-sized 3D elementary volume) for objects in
a brute-force manner. This general approach can be
applied to multi-camera setups, but a rectified two-
fold camera setup is often used to simplify the 3D
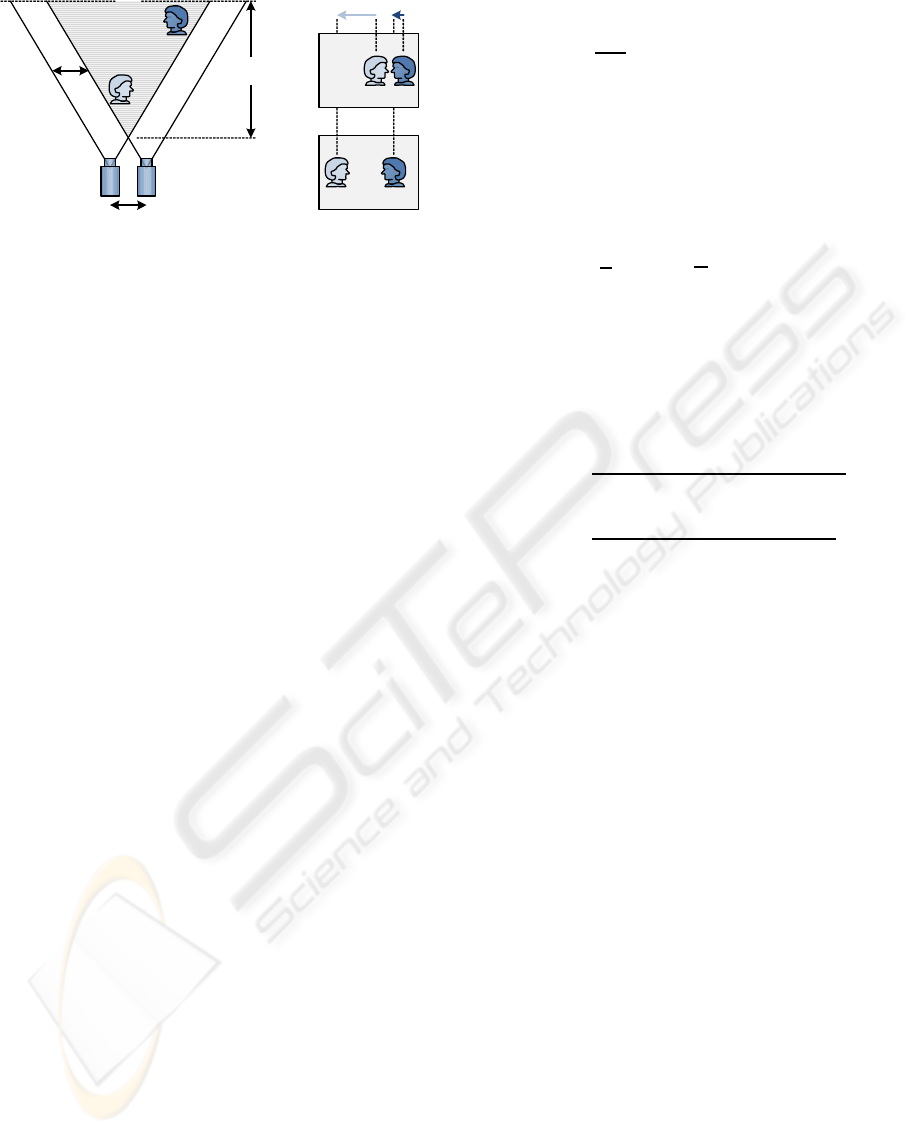
scan, which is known as stereo matching. In a stereo
camera setup, the depth of objects is determined by
estimating the amount of pixels they have shifted
from the left to the right image. As depicted in Fig. 1,
this shift is consistently known as the motion paral-
547
Rogmans S., Dumont M., Cuypers T., Lafruit G. and Bekaert P. (2009).
COMPLEXITY REDUCTION OF REAL-TIME DEPTH SCANNING ON GRAPHICS HARDWARE.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 547-550
DOI: 10.5220/0001806505470550
Copyright
c
SciTePress
Right View
Depth
Scan Range
Max.
Parallax
Camera Baseline
Left View
Motion Parallax
8
Figure 1: Basic principles of stereo matching, that can be
seen as a simplified 3D depth scan.
lax or disparity, and directly correlates to the objects’
depth. Objects close to the camera exhibit a large
parallax and vice versa, with the maximum parallax
determined by the baseline distance between the two
cameras. Looking for matches in the stereo pair –
using a systematically decreasing disparity, starting
from the maximum value – can therefore be seen as
a simplified front-to-back depth scan.
Consistently surveyedby (Scharstein and Szeliski,
2002), stereo matching algorithms can be divided into
a cost computation, cost aggregation, disparity se-
lection and disparity refinement processing module.
Local algorithms tend to put their focus on the ag-
gregation, and generally discard the refinement. As
recently indicated by a performance study of (Gong
et al., 2007), one of the most promising local algo-
rithms is the adaptive weights approach. Therefore,
this approach is used as a case-study. For the inter-
ested reader, the complete algorithmic description can
be found in the paper of (Yoon and Kweon, 2006).
However, our paper only presents a high-level de-
scription of the adaptive weights algorithm, to obtain
a basic analysis of its current complexity.
The GPU implementation of the adaptive weights
is composed out of three different types of floating
point-based operations. These are the texture (i.e.
memory read), render (i.e. memory write), and com-
putational operations. The matching cost C
AD
com-
putation inputs an RGB-colored left/right image pair
I
∗
0
(x,y) and I
∗
1
(x,y), disparity hypothesis d, and inte-
grates the absolute differences of each color channel
according to the dot product
C
AD
(x,y,d) = g· |I
∗
0
(x,y) − I
∗
1
(x− d,y)| , (1)
with a grey-scaling vector g = h0.299, 0.587, 0.114i.
The matching cost is computed for each hypothesis d
from the search range S, regardless of the presence of
objects at the examined depth. Consequently, the cost
is truncated to a given maximum τ and normalized
(toward 255 when considering 24-bit color images),
following
C
TAD
(x,y,d) =
255
τ
· min(C
AD
(x,y,d) , τ) , (2)
to reduce the impact of noise inside the source im-
ages. The cost is then aggregated by a 33 × 1 hori-
zontal and 1 × 33 vertical separated 1D convolution
kernel w
H
(x,y,u), respectively w
V
(x,y,v). The com-
position of these kernels are based on the Gestalt prin-
ciples of similarity and proximity, and are therefore
computed in a preprocessing step according to
w
H
(x,y,u) = e
−
1
γ
s
|∆c
xu
|
+ e
−
1
γ
p
|u|
, (3)
with |∆c
xu
| being the Euclidean color distance be-
tween I
∗
0
(x,y) and I
∗
0
(x + u,y), and γ
s
= 17.6, γ
p
=
40.0 being a fall-off rate for the similarity, respec-
tively proximity term. The vertical kernel w
V
is com-
puted in a similar manner. Consequently, the aggre-
gated cost A
WE
is defined as
A
′
WE
(x,y,d) =
w
H
(x,y,u) ∗
u
C
TAD
(x+ u, y,d)
µ
H
xy
, (4)
A
WE
(x,y,d) =
w
V
(x,y,v) ∗
v
A
′
WE
(x,y+ v,d)
µ
V
xy
, (5)
where µ
H
xy
, µ
V
xy
are normalization constants, and A
′
WE
stores the intermediate result of the horizontal aggre-
gation. Finally, the best matching cost is selected
out of all disparity hypotheses conceived in S, on a
winner-takes-all (WTA) basis. The resulting depth
map D(x,y) is therefore composed according to
D(x,y) = arg min
d∈S
A
WE
(x,y,d) . (6)
Table 1 reflects our analysis of the type and
amount of operations that are involved to compute
a depth map with the adaptive weights approach us-
ing a 33× 33 convolution kernel, where p defines the
amount of pixels in the image, and h the amount of
disparity hypotheses, i.e. the cardinality of S. Hence
the total amount of operations O to generate a depth
map can be described as
O = (1027+ 23· h)· p , (7)
resulting in a little over 17.6 Gops for the 1800 ×
1500 Teddy scene (Middlebury, 2003).
3 COMPLEXITY REDUCTION
The proposed method can reduce the total complex-
ity of the adaptive weights algorithm, or any other
local stereo matching algorithm for that matter. To
achieve this, the algorithm is executed twice, but with
different inputs. In the first pass, the complete volume
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
548
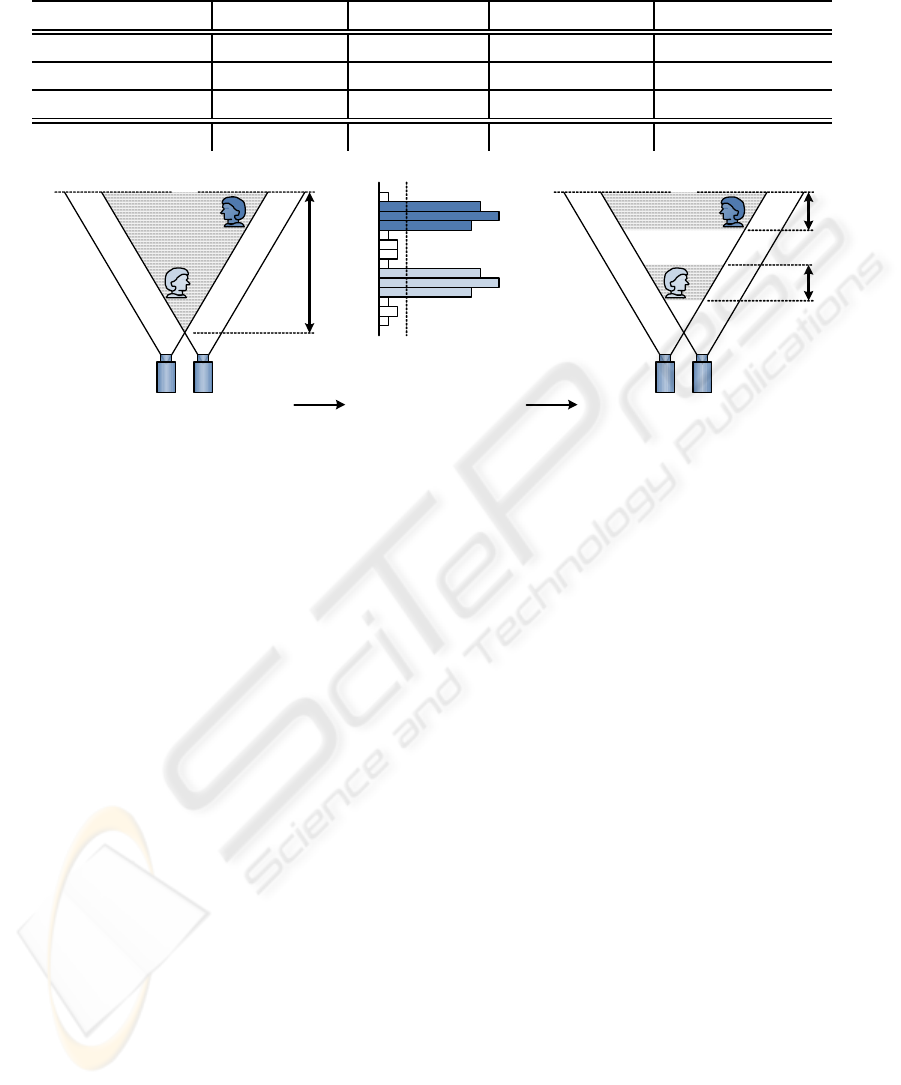
Table 1: Amount of operations needed to generate a depth map with the adaptive weights algorithm using a 33× 33 convolu-
tion kernel, in function of the amount of image pixels p and disparity hypotheses h.
Preprocessing Matching Cost Cost Aggregation Disparity Selection
Texture Ops 198 · p 6· p· h 132· p · h 1· p· h
Computational Ops 764· p 13· p · h 256· p · h 1· p· h
Render Ops 64 · p 1· p· h 1· p· h 1· p
TOTAL OPS 1026· p 20· p· h 1· p · h (2· h+ 1)· p
Adaptive Scan Range
8
Full Scan Range
8
Histogram
Noise Threshold
ANALYSIS FEEDBACK
Figure 2: The principle of our proposed complexity reduction. The full 3D volume is scanned with a low-complexity approach,
and analyzed through a histogram. Consequently, an accurate high-complexity scan is performed on an adaptive range.
is scanned over the entire search range S, but with
a smaller input image resolution. Consequently, an
analysis on the depth map D is performed by comput-
ing the histogram H (d). As shown in Fig. 2, the his-
togram indicates the depths where objects are actually
located. In (Gallup et al., 2007), the histogram has
already been used to find the best orientation of the
depth sweep, by performing the sweep for multiple
orientations and selecting the orientation that leads
to the minimum data-entropy of the histogram. Fur-
thermore, (Geys et al., 2004) also used histogram in-
formation, but similar to (Gallup et al., 2007), this
is mainly to lever the resulting quality of the algo-
rithm. In our proposed approach, the histogram infor-
mation acquired from a coarse-grained full range scan
leads to an accurate fine-grained scan over an adaptive
range. As the complexity of the histogram computa-
tion is fairly low itself, the potential to accelerate a
local stereo matching algorithm becomes very high.
In general, the less pronounced foreground fatten-
ing (Scharstein and Szeliski, 2002) an algorithm ex-
hibits, the more the input image resolution can be re-
duced in the first pass, while still maintaining a rep-
resentative histogram. In case of the adaptive weights
approach, the input image dimensions can be reduced
up to four times, resulting in a 16-fold reduction of
the original complexity.
To determine which subset S
sub
⊆ S to take, the
values of the histogram are compared with a given
threshold δ. Instead of fixing the treshold δ, it can
be made dynamic by setting the level proportional
to the data-entropy of the histogram. Therefore, the
threshold will be set lowfor complex scenes with fine-
grained geometry, and high when little geometry is
present. Hence, this efficiently filters out noise due to
mismatches inherent to the local algorithm.
4 OPTIMIZATIONS
The aforementioned algorithmic complexity is only
valid when considering the use of conventional Gen-
eral Purpose GPU (GPGPU) computing (Owens et al.,
2007). However, several optimization schemes can
be applied to further reduce the complexity of lo-
cal stereo algorithms. For the cost aggregation mod-
ule, the amount of texture operations can be reduced
by half, when bilinear sampling is used to aggre-
gate two values with a single memory lookup. Fur-
thermore, in the next-generation GPGPU paradigm
CUDA, 16 memory operations can be coalesced into
a single memory read operation. For the disparity se-
lection, the depth test of the GPU can be exploited to
avoid all explicit operations (Lu et al., 2007). How-
ever, the depth test can only be exploited through
the traditional GPGPU paradigm using Direct3D or
OpenGL. Nevertheless, thanks to the recent intro-
duction of CUDA v2.0 and the complete support of
interoperability between CUDA and Direct3D, both
paradigms can be combined to form a highly opti-
mized implementation.
COMPLEXITY REDUCTION OF REAL-TIME DEPTH SCANNING ON GRAPHICS HARDWARE
549

(b)(a)
(d) (e)
(c)
Figure 3: (a) The Teddy scene, (b) low-complexity depth
map, (c) joint histogram, (d) the resulting high-quality depth
map with reduced operations, and (e) the original result.
5 EXPERIMENTAL RESULTS
The proposed method was tested on the 1800× 1500
Teddy scene (see Fig. 3a) of the Middlebury dataset
(Middlebury, 2003), with disparity search range S =
{0,... , 240}. The image resolution was lowered
16 times to 450 × 375, which yields the dispar-
ity map depicted in Fig. 3b. After the histogram
(see Fig. 3c) analysis, the detected subset S
sub
=
{60, . . . ,96,108,...,180} is only 45% of the orginal
search range S. As the first scan is only 1/16
th
(or
6.25%) of the original complexity, a total complex-
ity reduction of about 48% is harnessed. The dispar-
ity map in Fig. 3d is therefore generated in about 8.5
Gops, instead of the original result in Fig. 3e, which
takes 17.6 Gops. Our control-loop scheme therefore
yields a two-fold complexity reduction, and is able to
double the execution speed of the algorithm.
Considering that the complexity of the first pass is
almost negligible, the proposed control loop add-on
will allow for a speedup, proportional to the amount
of void within the scanned volume. This is particu-
larly useful in eye-gaze corrected video chat (Dumont
et al., 2008), as only the chat participant needs to be
scanned in a rather large office space.
6 CONCLUSIONS
We have proposed a control loop add-on to reduce the
complexity of local real-time stereo matching algo-
rithms. The histogram of a coarse-grained depth scan
is analyzed to adjust the input parameters of a con-
sequent fine-grained accurate scan, causing the algo-
rithm to avoid scanning in spaces that lack the pres-
ence of objects. Hence, the orignal brute-force al-
gorithmic complexity can be reduced in proportion
with the amount of void within the volume, while
still remaining fully compliant with stream-centric
paradigms such as CUDA or Brook+.
ACKNOWLEDGEMENTS
Sammy Rogmans would like to thank the IWT for
the financial support under grant number SB071150.
Tom Cuypers and Philippe Bekaert acknowledge the
financial support by the European Commission (FP7
IP
¨
2020 3D media
¨
). Furthermore, all authors recog-
nize the financial support from the IBBT.
REFERENCES
Dumont, M., Maesen, S., Rogmans, S., and Bekaert, P.
(2008). A prototype for practical eye-gaze corrected
video chat on graphics hardware. In Proc.of SIGMAP.
Gallup, D., Frahmand, J., Mordohai, P., Yang, Q., and Polle-
feys, M. (2007). Real-time plane-sweeping stereo
with multiple sweeping directions. In Proc. of CVPR.
Geys, I., Koninckx, T. P., and Gool, L. V. (2004). Fast in-
terpolated cameras by combining a GPU based plane
sweep with a max-flow regularisation algorithm. In
Proc. of 3DPVT.
Gong, M., Yang, R., Wang, L., and Gong, M. (2007). A
performance study on different cost aggregation ap-
proaches used in real-time stereo matching. IJCV,
75(2):283–296.
Lu, J., Rogmans, S., Lafruit, G., and Catthoor, F. (2007).
High-speed dense stereo via directional center-biased
support windows on programmable graphics hard-
ware. In Proc. of 3DTV-CON.
Middlebury (2003). http://vision.middlebury.edu/stereo.
Owens, J., Luebke, D., Govindaraju, N., Harris, M., Kruger,
J., Lefohn, A., and Purcell, T. (2007). A survey of
general-purpose computation on graphics hardware.
CG Forum, 26(1):80–113.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. IJCV, 47(1-3):7–42.
Yang, R., Welch, G., and Bishop, G. (2002). Real-time
consensus-based scene reconstruction using commod-
ity graphics hardware. In Proc. PG.
Yoon, K.-J. and Kweon, I.-S. (2006). Adaptive support-
weight approach for correspondence search. IEEE
PAMI, 28:650–656.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
550
