
SIMPATROL
Towards the Establishment of Multi-agent Patrolling as a
Benchmark for Multi-agent Systems
Daniel Moreira, Geber Ramalho and Patrícia Tedesco
Centro de Informática, Universidade Federal de Pernambuco, Prof. Moraes Rego Av., Recife, Brazil
Keywords: Multi-agent systems (MAS), Multi-agent patrolling (MAP), MAS benchmarks, MAS testbeds, SimPatrol.
Abstract: This paper discusses the establishment of multi-agent patrolling (MAP) as a benchmark for multi-agent
systems (MAS). It argues that MAP can be a good benchmark for MAS, and points out what is lacking in
order for this to happen. From the identified lacuna of not having a testbed, it presents SimPatrol, a
simulator of MAS constructed strictly for the patrolling task. With such testbed, new results of performance
are obtained for some of the previously proposed patrolling strategies.
1 INTRODUCTION
AI began to focus less on component technologies
and more on complete, integrated systems (Hanks,
Pollack and Cohen, 1993). In this scenario, multi-
agent systems (MAS) offer a good way to design
such integrated systems (Russell and Norvig, 2003).
The concept of multiple agents perceiving and acting
on an environment allows the integration of many
distinct technologies, and also systemizes the use of
such combined technologies to craft a solution that
meets the needs of a specific application.
From the industrialization process, Computer
Science inherited the necessity to evaluate and
compare the performance of distinct logic systems
(algorithms, architectures, etc.). Drogoul, Landau
and Muñoz (2007) justified such necessity as a
manner to determine what systems are better
indicated to solve a given problem, usually called
benchmark.
Succinctly, benchmarks are precisely described
problems, solvable by distinct techniques and
representative of a class of problems. Hanks, Pollack
and Cohen (1993) discussed the importance of
establishing benchmarks for MAS, as well as Stone
(2002), and Drogoul, Landau and Muñoz (2007)
criticized the currently most popular MAS
benchmarks: the RoboCup and the TAC
competitions.
Initially not aware of the benchmark issue, many
researchers have been conducting studies about
multi-agent patrolling (MAP) since 2002 (Machado,
2002; Almeida, 2003; Santana, 2004; Chevaleyre,
2005; Menezes, 2006). Informally, patrolling is the
act of moving around a field in order to visit
regularly its areas. The goal is to minimize the time
lag between two visits to a same place.
MAP is useful for domains where distributed
surveillance, inspection or control is required. For
instance, patrolling agents can help administrators in
the surveillance of failures or specific situations in
an Intranet, or detect recently modified or new web
pages to be indexed by search engines (Machado,
2002).
Despite the quantity of developed work, up until
this point, MAP researchers did not have the means
to accurately compare the proposed solutions.
Dealing with such difficulties and being inspired by
the criticism done about the RoboCup and TAC
competitions (Stone, 2002; Drogoul, Landau and
Muñoz, 2007), one additional issue born was just
related to the potential of the MAP problem as a
benchmark for MAS.
Thus, this work aims to discuss the establishment
of the MAP problem as a benchmark for MAS. Also,
as a very first step to fulfil the identified gaps,
SimPatrol is introduced as a MAS software
simulator that offers a testbed for the MAP problem.
Next section discusses benchmarks for MAS,
and section 3 presents MAP as a MAS benchmark.
Section 4 introduces SimPatrol, bringing some
interesting new results obtained with the simulator.
570
Moreira D., Ramalho G. and Tedesco P. (2009).
SIMPATROL - Towards the Establishment of Multi-agent Patrolling as a Benchmark for Multi-agent Systems.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 570-575
DOI: 10.5220/0001807005700575
Copyright
c
SciTePress

2 BENCHMARKS FOR
MULTI-AGENT SYSTEMS
Benchmarks are well-defined problems that simplify
a more complex reality. The first goal of such
simplification is to support fair comparisons of
distinct solutions, as long as it facilitates the
submission of such solutions to the same situations.
Being a science of the artificial, besides an
analytic-theoretical vein, AI has a growing empirical
facet where controlled experimentation is
fundamental (Pereira, 2001). So, for such science,
benchmarks play an important role that exceeds the
issue of comparing competing systems. They are
part of the apparatus of empirical AI.
As pointed by Hanks, Pollack and Cohen (1993),
AI systems are intended to be deployed in large,
extremely complex environments. But before the
application to real problems, AI researchers submit
their methods, algorithms and techniques to
simplified, simulated versions of such environments
(i.e. to benchmarks).
Thus, the experimental process consists in the
researcher varying the features of the simulated
environment, or even the benchmark task, in order to
measure the resulting effects on system
performance. With such information, the researcher
shall be able to discriminate between uninteresting
isolated phenomena, and relevant general results,
adequately explaining why his (or her) system
behaves the way it does.
2.1 Definition
For AI, a benchmark is a problem sufficiently
generic in order to be solved by various different
techniques, sufficiently specific to let such distinct
techniques be compared, and sufficiently
representative of a class of real applied problems
(Drogoul, Landau and Muñoz, 2007).
Well-known AI benchmarks are the knapsack,
the n-queens, and the traveling salesman problems
(Drogoul, Landau and Muñoz, 2007). As one can
see, such problems are sufficiently generic – since
they can be solved by plenty of techniques – and
also sufficiently specific, as shown by the number of
studies comparing such techniques (Martello and
Toth, 1990; Russell and Norvig, 2004; Cook, 2008).
These problems are sufficiently representative, too,
since they are NP-complete problems (Garey and
Johson, 1979.)
However, as pointed by Hanks, Pollack and
Cohen (1993), since AI began to focus less on
component technologies and more on complete,
integrated systems (specially MAS), such classic
benchmarks revealed their limitations. They evaluate
the performance of component technologies
individually, ignoring the interactions of such
components one with the others and with the
environment.
So, what characterizes a benchmark for MAS? In
the same manner as the other benchmarks for AI,
benchmarks for MAS must be sufficiently generic
and sufficiently specific. Their particularity is
constituted just by the sufficiently representative
issue. As explained by Stone (2002), as long as the
complexity of MAS exceeds the NP-completeness
theory, their representativeness is related to AI
subfields like collaboration, coordination, reasoning,
planning, learning, sensor fusion, etc.
2.2 Good Benchmarks
Besides defining what a benchmark is for MAS, an
important aspect is defining what turns a benchmark
into a good benchmark.
As defined by Drogoul, Landau and Muñoz
(2007), a good benchmark is the one that makes the
representation and the understanding of new
methods easier, letting the researcher focus on the
solution rather than on the representation of the
problem.
From the point of view of Hanks, Pollack and
Cohen (1993), a good benchmark must also count
with a testbed. Succinctly, a testbed is a complete
software environment that offers an interface to
configure the parameters of a benchmark, as well as
assures that distinct techniques are being tested and
evaluated in equivalent situations.
2.3 RoboCup and TAC Competitions
As pointed out by Stone (2002), the RoboCup and
the TAC competitions comprise the currently most
popular benchmarks for MAS. The reason for such
popularity is related to the problems that such
competitions simplify through their benchmarks.
RoboCup challenges competitors to win soccer
games (one of the most popular sports of the world),
played by computer agents (Robocup, 2008). TAC,
the Trading Agent Competition, challenges
competitors to build trading agents that dispute for
resources in an e-market (Tac, 2008).
Both competitions have yearly promoted
international tournaments. Their benchmarks are
indeed sufficiently generic, given the diversity and
the quantity of proposed solutions by the many
competitors. Such benchmarks are also sufficiently
specific, once the proposed techniques are
SIMPATROL - Towards the Establishment of Multi-agent Patrolling as a Benchmark for Multi-agent Systems
571

confronted in tournaments. In other words, it is
expected that the winner presented a better
performance than the looser.
Having the representativeness issue in mind,
TAC can be considered sufficiently representative,
once the trading agents deal with many situations of
which solutions contribute in the fields of reasoning,
planning and learning. However, in the case of
RoboCup, its representativeness is somehow
questioned (Drogoul, Landau and Muñoz, 2007).
Considering, for example, a solution for
gathering relevant data from the combination of the
sensors of a player, it contributes for the sensor
fusion field, being representative. Nevertheless, a
solution for the problem of avoiding off sides during
a goal attack may not be so representative.
Stone (2002) presented more criticism to the two
competitions, pointing out problems like obsession
with winning, barriers to enter and even monetary
advantages of one competitor over the others.
Despite such drawbacks, both competitions count
with stable and consolidated testbeds that improve
the quality of their benchmarks. These testbeds are
the Soccerserver, that supports the simulation
benchmark of RoboCup (Robocup, 2008), and the
Classis Server, that supports the TAC Classic
benchmark of TAC (Tac, 2008).
Inspired by the discussion about benchmarks for
MAS, one issue that occurs to MAP researchers is
related to the possibility of establishing the MAP
problem as one of these benchmarks.
3 MULTI-AGENT PATROLLING
The multi-agent patrolling problem is stated as a
MAS of which environment is represented by a
graph and of which agents act as tokens moving on
it, visiting the nodes through the edges. So, the goal
is to minimize the time lag between two visits for
each node.
3.1 Can Multi-agent Patrolling be a
Benchmark for Multi-agent
Systems?
In order to evaluate the possibility of establishing
the MAP problem as a benchmark for MAS, the
following questions must be answered:
• Is MAP sufficiently generic?
• Is MAP sufficiently specific?
• Is MAP sufficiently representative?
The answer for the first question is shown to be
positive by the number of existing techniques
developed to solve the MAP problem. Since 2002, a
series of works has been carried out. While some
researchers tested empirically various techniques –
like reactive behaviour (Machado, 2002), machine
learning (Santana, 2004) and negotiation
mechanisms (Menezes, 2006) – Chevaleyre (2005)
presented a graph-based theoretical analysis of the
topic.
Taking the second question into consideration,
the answer is again positive. MAP is specific enough
in order to let the distinct proposed techniques be
compared; examples of such comparative studies are
Almeida et al. (2004), and Santana (2004).
In all studies, the proposed strategies were
compared based on the performance of the patroller
agents when submitted to each one of the six maps
described by Santana (2004) – actually, an effort to
represent the topologies he found to be the most
likely to face in real problems.
Finally, having in mind the third question, MAP
can be considered sufficiently representative for two
reasons. First, from the AI point of view, it deals
with situations where solutions contribute to the
fields of collaboration and coordination of agents
(Machado, 2002), planning (Almeida, 2003),
learning (Santana, 2004), communication of agents
(Menezes, 2006), etc.
Second, MAP is proven representative enough
given the diversity of possible applications.
Machado (2002) noticed that it is useful for every
domain where distributed surveillance, inspection or
control is required.
Answered the three questions, a relevant issue is
related to how good MAP is, as a benchmark for
MAS. MAP turns the representation and the
understanding of new patrolling methods easier in
the following ways:
1. The territories to be patrolled are
represented by generic graphs. So, when a
virtual patroller agent visits the nodes of a
graph, it can be the night watchman visiting
the rooms of a museum, or maybe a bot
inspecting the links of an intranet.
2. The collected metrics are all based on the
time lag between two visits to a node (i.e.
the idleness of the node). So, it does not
matter how the agents decided the order and
the exact time to visit the nodes; to impact
on the performance of the system, all they
have to do is to visit the nodes quickly.
Despite the benefits inherited from the definition
of the MAP problem, some criticism can be done
about its state-of-art.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
572

3.2 Criticism to the State-of-art of
Multi-agent Patrolling
One source of criticism to the previous works of
MAP is related to the features that were not taken
into consideration by researchers yet. Issues like
graphs of which nodes have distinct visiting
priorities (like it can occur in the patrolling of a
bank, where the room of the main safe must be
visited more frequently than the others), or of which
nodes and edges can become unavailable in
simulation time were not considered in the first
proposed patrolling strategies.
In the same way, open societies of agents (i.e.
societies of which agents can appear or disappear
during simulation) and the possibility to associate
energetic costs to the actions and perceptions of the
patrollers were not explored.
Actually, one of the most important features not
analyzed until this work is related to the counting of
time. Taking into consideration the comparisons
done among the various proposed patrolling
strategies (Almeida et al., 2004), all of them were
experimented in simulators that counted the time of
simulation based on the agents' perceive-think-act
cycle.
So, when researchers simulated their strategies in
1000 cycles (for example), they were actually letting
their agents perceive, think and act 1000 times.
Similarly, the metrics of idleness were calculated
based on such numbers, what means that in the
worst case, the maximum possible idleness for the
graph being patrolled was 1000.
Due to the diversity of applied techniques and
reasoning mechanisms, it was perceived that such
method of time simulation represents a problem to
the comparing studies. It does not take into
consideration the real time spent by the agents when
deciding their next actions. So, if a strategy really
chooses the best actions but, as a consequence,
spends too much time reasoning, it will not be
penalized in any form.
Another source of criticism is the lack of a
testbed to let researchers easily implement their own
techniques and compare it to the previous ones. If
deciding to use one of the simulators applied to the
previous works, a developer should study carefully
the internal mechanisms of such programs, due to
the high coupling of modules.
Someone wanting to add new behaviours to the
patroller agents, or maybe to implement a new
graphical interface to show the simulation, should
first know the internal models of graphs, agents,
actions and perceptions, and also understand how
the eventual controlling classes manipulate them.
Add to that, they should also codify their routines in
the C/C++ programming language.
Bearing in mind the issues discussed, the
necessity for the creation of a better testbed was
noticed, in order to support the promotion of the
MAP problem as a benchmark for MAS.
In this light, SimPatrol was developed.
4 SIMPATROL: A TESTBED FOR
MULTI-AGENT PATROLLING
SimPatrol is a simulator of multi-agent systems
constructed for the patrolling task. Since it is open
source, someone wanting to check its code can do it
at any time in a SVN-manner by the following
address:
http://SimPatrol.googlecode.com/svn/SimPatrol/.
Its initial version has the basic requiements of
territory simulation, where a new graph to be
patrolled can be initially loaded, since it is in a XML
adequate form. Besides this, there is also the
simulation of perceptions and actions provided to the
patroller agents: fundamental mechanisms of
movement through the nodes and edges of the graph,
communication and vision of the neighbourhood and
near agents are implemented.
Technically inspired by Soccerserver – the
simulator of RoboCup (Robocup, 2008) – and by
Classic Server - the simulator of TAC (Tac, 2008) –
SimPatrol operates using a client-server architecture.
Succinctly, the graph and other configurations
are loaded at the server, while patrollers connect to
ports on the server in order to perceive and act on
the generated environment (working as clients). Due
to this feature, such agents can be coded in any
language, as soon as they implement the defined
communication protocols.
So, the internal models are updated based on the
actions intended by the agents, while the simulator
periodically provides them their appropriated
perceptions. Additionally, some auxiliary ports are
reserved to output the MAP metrics, and others are
reserved for logging the main events of the
simulation, in a way that such events can be
obtained online, or properly stored to be played
later.
As an effort to extend the MAP research, the
simulator also permits the creation of dynamic
territories, i.e. graphs of which edges and nodes are
associated to time probability distributions that rule
the appearing and disappearing of such elements.
Moreover, it is possible to give distinct visiting
priorities to each node, as well as to create open
SIMPATROL - Towards the Establishment of Multi-agent Patrolling as a Benchmark for Multi-agent Systems
573
societies of agents on the simulation, i.e. in some
user defined cases, new patrollers can be added or
die in simulation time. With these features,
developers can test their strategies in very dynamic
environments, adding a new step to the MAP
research.
Additionally, having in mind the robotic aspect
of MAP, SimPatrol provides mechanisms to set a
stamina feature to the agents, which means that they
can spend an amount of energy when perceiving or
acting on the environment. In such cases, the
territory can have some supply points where agents
can recharge their stamina.
Finally, the simulator also provides the option to
count the time of simulation considering the time
spent by the agents to think and decide for their next
action.
4.1 New Results Obtained with
SimPatrol
In the work of Almeida et al. (2004), some of the
previously proposed patrolling strategies were
compared. The set-up of experiments was
compounded by the six maps proposed by Santana
(2004), all expressed in figure 1. For each map,
randomly generated configurations for the initial
positions of the patroller agents were equally applied
to each strategy.
Figure 1: Maps proposed by Santana (2004). In (a), there
is the so-called A Map. In (b), there is the B Map. In (c),
there is the Circular one, while in (d) there is the
Corridor. In (e) there is the Islands map, and in (f) comes
the Grid.
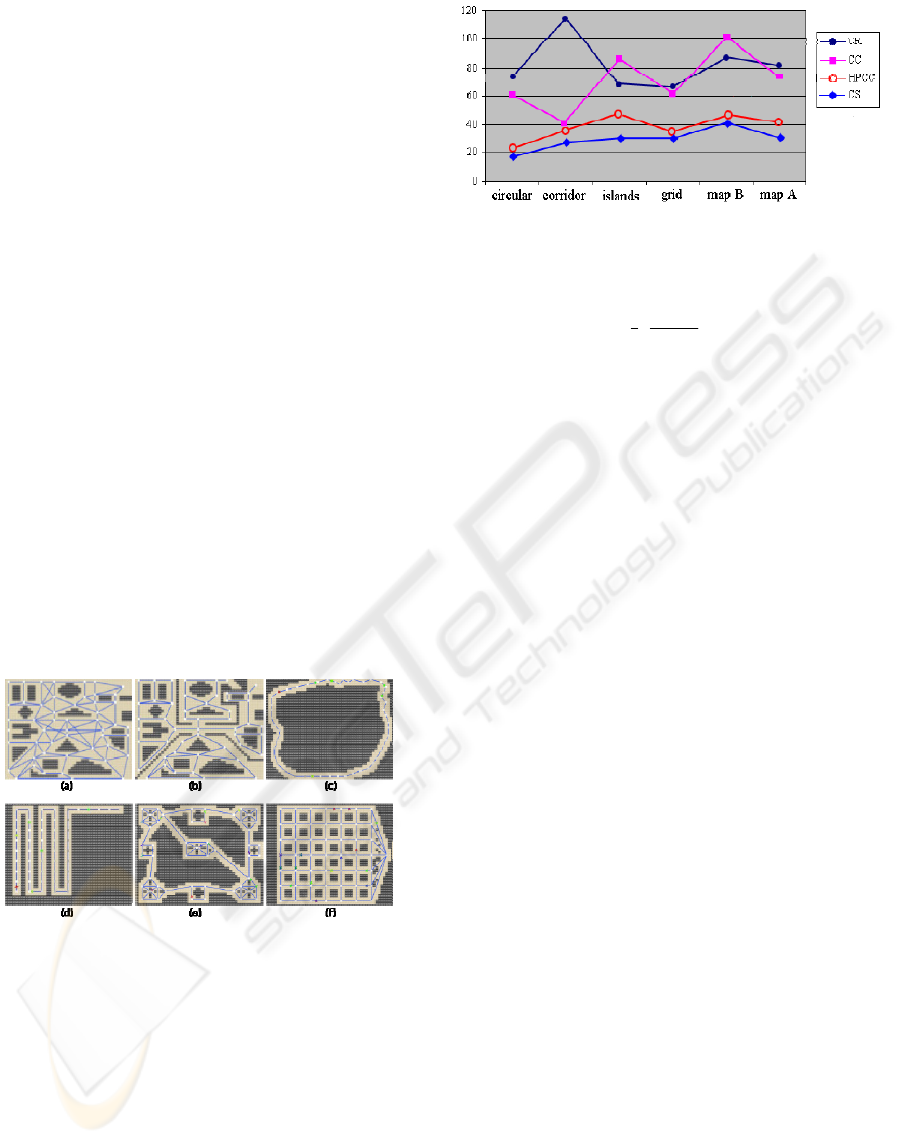
Figure 2 shows the results of 4 patrolling
strategies applied to each one of the six maps. In
each experiment, 5 agents were used to patrol the
graph territory.
The y-axis indicates the average idleness of the
graphs (see equation 1), measured in the agents’
perceive-think-act cycles.
Figure 2: Results for the patrolling task executed by 5
agents (Almeida et al., 2004).
()
dt
ord
ti
t
tI
t
ord
k
k
∫
∑
=
=
0
0
)(
1
(1)
In equation 1,
)(ti
k
is the time lag between the
last visit of node k and time t (i.e. its idleness), and
ord is the order of the graph to be patrolled.
Admitting that the average idleness is inversely
proportional to the performance of a strategy, the
strategy that presented the best performance was the
SC one (Single Cycle strategy). In such architecture,
agents are let to patrol the graph moving on its TSP
solution, all to the same direction and equally far
from its predecessor (Chevaleyre, 2005).
From figure 2, the second best strategy was the
HPCC one (Heuristic Pathfinder Cognitive
Coordinated agents). In that solution there is a 6
th
agent that coordinates the others and decides their
next goal nodes to visit. In such decision, the
coordinator uses a heuristic that takes into
consideration the idlenesses and the distances of the
nodes (Almeida, 2003).
Similarly, the CC strategy (Cognitive
Coordinated agents) also counts with a 6
th
coordinator, but this one decides the next goals of
the patrollers based only on the idlenesses of the
nodes (Machado, 2002).
Finally, the strategy that showed worst
performance was the CR one (Conscientious
Reactive agents). As its name suggests, its agents are
reactive, deciding as the next node to visit the one
that has the biggest idleness on the neighbourhood
(Machado, 2002).
Interested in the impact of the time used by the
agents to decide their next nodes, the same described
experiments were reproduced in SimPatrol.
Nevertheless, with the new method of time counting,
the obtained average idleness was not based on the
agents’ perceive-think-act cycles anymore. It was
measured in seconds, and reflected the deliberating
spent times.
Figure 3 shows the new results obtained with
SimPatrol. As it was expected, the CR agents, being
ICAART 2009 - International Conference on Agents and Artificial Intelligence
574
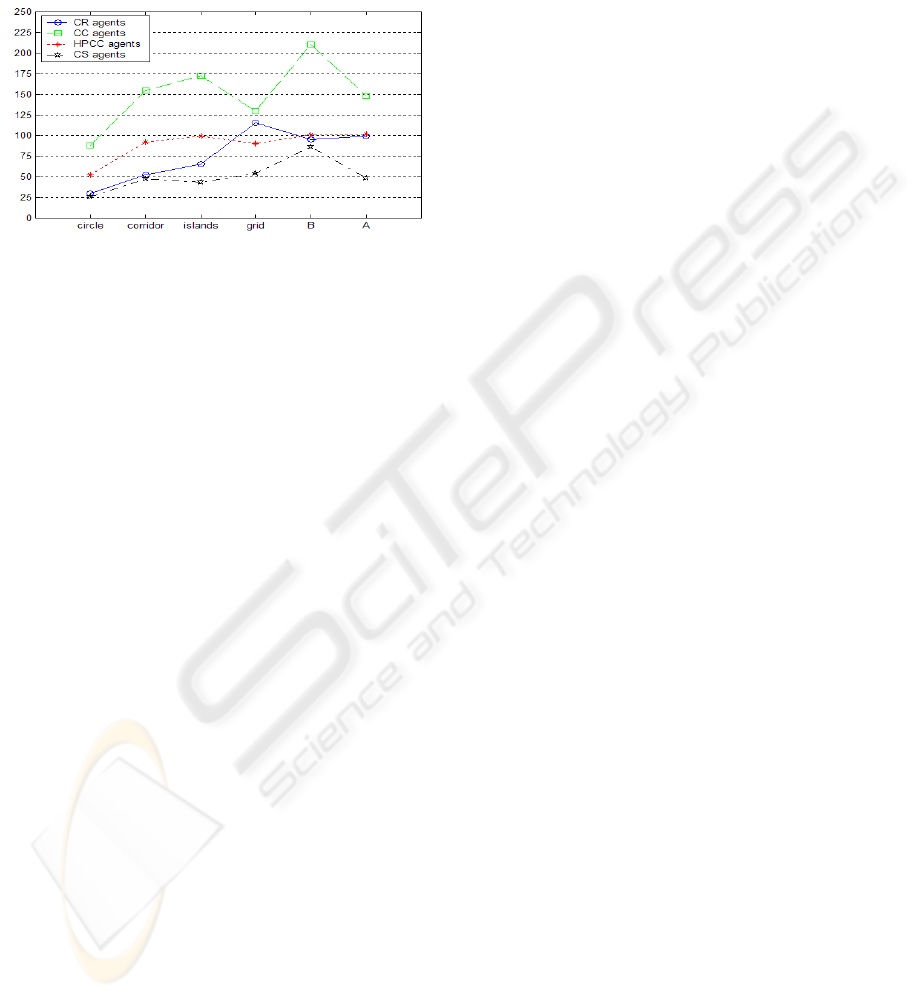
reactive, presented a better performance, due to the
small time spent to decide their next actions.
On the other hand, the coordinated strategies (CC
and HPCC agents) were penalized for the concurred
and long service executed by the coordinators in
order to determine the goals of all the others agents.
Figure 3: New results obtained with SimPatrol for the
patrolling task executed by 5 agents.
Curiously, for the maps of which nodes had the
smallest degrees (Circular and Corridor ones), the
CR agents presented performance similar to the so-
good SC ones. The reason for such behaviour was
the small amount of nodes and idlenesses to check
due to the small neighbourhoods.
5 CONCLUSIONS
Multi-agent patrolling (MAP) has recently gained
attention from MAS researchers due to its
representativeness and potential for practical
applications. As a contribution to such fields, this
paper argued that MAP can be a good benchmark for
MAS. Additionally, it also identified what was
lacking in order to assure this to happen: a testbed
that could let researchers primarily focus on the
solution, rather than on the representation of the
problem, as well as define parameters that could let
them easily apply the proposed techniques in many
varied situations (with dynamic environments, open
societies of agents, energetic-expensive actions and
perceptions, for example).
So, SimPatrol was proposed as a software
simulator of MAS constructed strictly for the
patrolling task. With such testbed, new results of
performance were shown for some of the previously
proposed patrolling strategies. From these first
results, it was perceived the necessity of re-evaluate
the performance of all the previously proposed
strategies, as a further work.
Due to the new method of time counting
implemented, that considers the time spent by the
agent patrollers to decide their next actions, different
results of the comparative study of the patrolling
strategies have been obtained.
REFERENCES
Almeida, A. 2003. Patrulhamento Multiagente em Grafos
com Pesos. MSc dissertation. Universidade Federal de
Pernambuco.
Almeida, A., Ramalho, G., Santana, H., Tedesco, P.,
Menezes, T., Corruble, V., Chevaleyre, Y. 2004.
Recent Advances on Multi-agent Patrolling. In: XVII
Brazilian Symposium on Artificial Intelligence.
Springer-Verlag. São Luís. p. 474-483.
Chevaleyre, Y. 2005. Le probleme multi-agents de la
patrouille. In: Analles du LAMSADE n. 4. [S.n.]. Paris.
Cook, W. 2008. The Traveling Salesman Problem.
[online]. Available from: http://www.tsp.gatech.edu/.
[Accessed 12 April 2008].
Drogoul, A., Landau, S., Muñoz, A. 2007. RoboCup: un
benchmark pour l’IAD? Unpublished paper.
Garey, M., Johnson, D. 1979. Computers and
Intractability: A Guide to the Theory of NP-
Completeness. Bell Telephone Labs. Murray Hill.
Hanks, S., Pollack, M., Cohen, P. 1993. Benchmarks,
Testbeds, Controlled Experimentation and the Design
of Agent Architectures. Technical Report –
Department of Computer Science and Engineering,
University of Washington.
Machado, A. 2002. Patrulhamento Multiagente: uma
Análise Empírica e Sistemática. MSc dissertation.
Universidade Federal de Pernambuco.
Martello, S., Toth, P. 1990. Knapsack Problems:
Algorithms and Computer Implementations. John
Wiley & Sons. West Sussex.
Menezes, T. 2006. Negociação em Sistemas Multiagente
para Patrulhamento. MSc dissertation. Universidade
Federal de Pernambuco.
Pereira, L. 2001. Inteligência Artificial: Mito e Ciência.
[online]. Available from:
http://www.geocities.com/revistaintelecto/iamc.html.
[Accessed 30 September 2008].
Robocup. 2008. Robocup. [online]. Available from:
http://www.robocup.org. [Accessed 21 May 2008].
Russell, S., Norvig, P. 2003. Artificial Intelligence: A
Modern Approach. Prentice Hall. New Jersey. 2
nd
ed.
Santana, H. 2004. Patrulha multiagente com
aprendizagem por reforço. MSc Dissertation.
Universidade Federal de Pernambuco.
Stone, P. 2002. Multi-agent Competitions and Research:
Lessons from RoboCup and TAC. In: RoboCup 2002.
Fukuoka. Robot Soccer World Cup VI, Lecture Notes
in AI. Springer-Verlag. Berlin. p. 224-237.
TAC. 2008. Trading Agent Competition. [online].
Available from: http://www.sics.se/tac/page.php?id=1.
[Accessed 23 May 2008].
SIMPATROL - Towards the Establishment of Multi-agent Patrolling as a Benchmark for Multi-agent Systems
575
