
MULTI-LAYERED CONTENTS GENERATION FROM REAL
WORLD SCENE BY THREE-DIMENSIONAL MEASUREMENT
M. K. Kim
1
, Y. Nakajima
1, 2
, T. Takeshita
1
, S. Onogi
2
, M. Mitsuishi
1
and Y. Matsumoto
1, 2
1
School of Engineering, the University of Tokyo, Tokyo, Japan
2
Intelligent Modeling Laboratory, the University of Tokyo, Tokyo, Japan
Keywords: Layer Content, Three-dimensional measurement, Depth from Focus, Spatio-Temporal image analysis.
Abstract: In this paper, we propose a method to create automatically multi-layered contents from real world scene
based on Depth from Focus and Spatio-Temporal Image Analysis. Since the contents are generated by layer
representation directly from real world, the change of point of view is able to freely and it reduces the labor
and cost of creating three-dimensional (3-D) contents using Computer Graphics. To extraction layer in the
real images, Depth from Focus is used in case of stationary objects and Spatio-Temporal Image Analysis is
used in case of moving objects. We selected above two methods, because of stability of system. Depth from
Focus method doesn’t need to search correspondence point and Spatio-Temporal Image Analysis has also
simple computing algorithm relatively. We performed an experiment to extract layer contents from
stationary and moving object automatically and the feasibility of the method was confirmed.
1 INTRODUCTION
Three-dimensional (3-D) contents are required in
various field of Virtual Reality. It is various from
cultural asset to cityscape. In case of cultural asset,
its digitalization is required quite complex and
precise description. The cultural asset is digitalized
by using 3-D range measurement information of
object and Computer Graphics for delicate contents.
In this case, contents generation is also necessary to
measurement apparatus such as helicopter or Global
Positioning System. Hence, it needs huge labor and
cost.
On the other hand, 3-D content digitalization of
cityscape (e.g. building, car) is not necessary
delicateness such as cultural asset. For instance,
when you go sightseeing or visit virtual space, used
all contents should not be elaborate like the cultural
asset contents.
In the latter case, if real image is used to create
3-D contents directly, it is possible to generate
simply more real 3-D contents by less effort and
cost.
However, it has been a little problem. When we
see the street through the Street View, we often
don’t go where we want to see. Since photograph
data is expressed discretely.
Therefore it has limitation of viewpoint. Google
Street View is one example of latter case.
To solve this problem, we employ a solution for
3-D scene description. The concept is 3-D
representation with 2-D real image layer. In this
method, 3-D space and contents is represented by
using arrangement of 2-D layers and concerning
psychology factor. This 3-D representation method
is proposed and explained their effects by Ogi
(Ogi07). There are the following two advantages.
First, data volume is small, because one layer can
express multi-point of view. Second, we can get
continuous point of view that doesn’t get before.
Our team with Ogi have been developing Dome
Display Layer Representation System based on
Figure 1. In this system, 2-D contents are presented
in dome display and psychology factor (Seno08) is
considered at the same time. So, high presence is
obtained. In addition, data size is small because of
layer representation. And this system is preformed
three steps. First, 2-D layer contents are made and
segmented from the real world image. Next, Layers
are integrated according to the relation of the point
of view and the relation of 3-D position of layer.
Finally, these 2-D layer contents are presented on
dome display in consideration of the distortion.
109
Kim M., Nakajima Y., Takeshita T., Onogi S., Mitsuishi M. and Matsumoto Y. (2009).
MULTI-LAYERED CONTENTS GENERATION FROM REAL WORLD SCENE BY THREE-DIMENSIONAL MEASUREMENT.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 109-112
DOI: 10.5220/0001820501090112
Copyright
c
SciTePress

Figure 1: Dome Display Layer Representation System.
In this project, we have been developing
automatic extraction method of layer contents with
real world image. Layers are made from real world
by 3-D measurement. 3-D measurement is necessary
to extract layer from 2-D image. By using this
method we can record cityscapes or landscapes and
change point of view everywhere we want. Actually,
the 3-D measurement performs discretely but we can
go to midpoint between measurement points and get
the scene naturally.
In this paper, two methods are proposed to layer
extraction.
First, in case of extraction of stationary layer, we
selected Depth from Focus method to extraction
layer. DFF is depth measurement method by the
degree of focus in different focus position image
((Nayar94) (Pentland87)). Mainly, using motion,
stereo or focus method is used for 3-D measurement
method from 2-D image. Motion and stereo utilize
changes of point of view. So they need to search
corresponding point. The search algorithm is quite
complex. Meanwhile focus method doesn’t need to
search corresponding point and the algorithm is
simple. Then we use focus information as extraction
method. Second, extraction of moving object is
performed by Spatio-Temporal Image Analysis
method. This method is relatively more stable in
terms of search less correspond point than other
method. And it is also possible to generate 3-D layer
contents from already existing video contents. But it
is unsuitable to extract still object.
If consider two methods, both still object and
moving object can be extracted at the same time. We
proposed a method to generate multi-layer contents
from real world scene by Depth from Focus and
Spatio-Temporal image analysis and we extracted
layer contents automatically.
2 METHOD
In this section, we introduce Depth from Focus and
Spatio-Temporal Image Analysis methods that
extract layer contents from real world scene.
2.1 Depth from Focus
In general, using motion and stereo camera method
is widely used for depth measurement from camera
to objects
(Birch) (Krotkov). Motion and stereo
methods basically utilize changes of point of view.
These methods need to search and compute
correspondence points. The search and computing
algorithm is quite complex. Meanwhile Depth from
focus method doesn’t need to search corresponding
point and the algorithm is simple.
Depth from focus method uses focus information.
Focus condition depends on the geometry setting of
the focal plane and object plane in a camera.
Roughly speaking, we can get more blurred image,
according to image plane is more distant from sensor
plane. The geometry of imaging is shown in
Figure 2.
Figure 2: Geometry of imaging.
Depth estimation performed following steps.
First, two or more images of different focused
position in each image can be acquired by changing
the sensor plane position or lens position at the
identical viewpoint. Next, the focus measure is
evaluated. In DFF, focus measure means degree of
focus in each image pixel. In third step, best focus
lens position is found. And then, the relation
between camera setting and the focal plane is
previously calculated by law of lens. Consequently,
we can estimate depth information from this process.
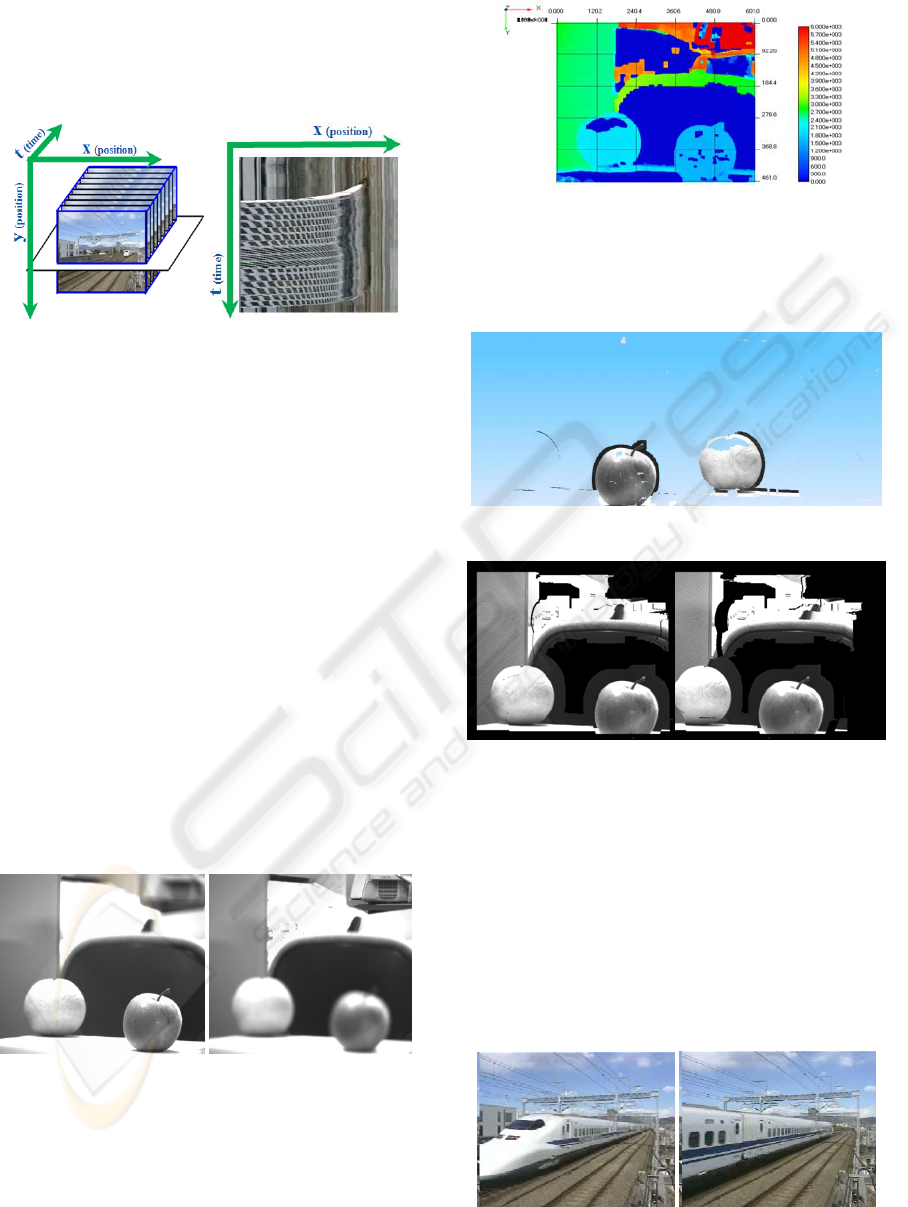
2.2 Spatio-Temporal Image Analysis
An image hexahedron is obtained by arranging the
video image sequence like Figure 3 (a). The cross
section view of the hexahedron perpendicular to
image plane is the image like Figure 3(b). The axis
of the image is position-time. So the image is called
Spatio-Temporal image. Spatio-Temporal image has
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
110
a feature at the position that color is not changed, the
image becomes stripe pattern in the time direction.
In this paper, the moving object is extracted using
this feature. To detect the stripe pattern, we use
frequency analysis by 2-D Fourier transformation.
Figure 3: (a) image sequence (b) Spatio-Temporal image.
3 EXPERIMENTAL RESULTS
3.1 Layer Generation based on Depth
from Focus
In this section, we computed the depth of object
using DFF, and extracted layered object contents by
dividing image layer according to depth information.
3.1.1 Depth Estimation with Apple and
Orange
Depth distribution was estimated from real scene
images shown in Figure 4. And the computed depth
map of Figure 4 is shown in Figure 5 (all depth is
expressed by color) by different focused images
about 40 as Figure 4. For instance, an apple and an
orange have different depth. Some areas are not
computable (dark blue) because of low texture or
CCD saturation.
Figure 4: (a) Defocused image. (b) Focused image.
3.1.2 Layer Segmentation Using Depth
Information
Layer segmentation using depth information was
performed. In the result, an apple and an orange
were extracted from real scene as shown in Figure 6
Figure 5: computed depth map.
And Figure 7 (a) shows the layers arrangement
according to 3-D positions. And Figure 7 (b) is the
same arrangement but different point of view.
Figure 6
:
Extracted layer of orange and apple.
Figure 7: (a) Object layers arrangement according to three
dimensional positions. (b) The arrangement virtually
changed view point (by camera position).
3.2 Layer Generation based on
Spatio-Temporal Image Analysis
In the experiment, the extraction of moving train in
video image was conducted by shown as Figure 10.
One of the spatio-temporal images is shown in
Figure 7(a). And in Figure 7 (b) the background
region judged by our method was expressed with
blue. The final result is shown in Figure 8.
Figure 8: Train image.
MULTI-LAYERED CONTENTS GENERATION FROM REAL WORLD SCENE BY THREE-DIMENSIONAL
MEASUREMENT
111

Figure 9: (a) Spatio-Temporal Image. (Blue is still region).
Figure 10: Extracted train.
3.3 Presenting Extracted Contents to
Dome Display
We use a hemispherical dome display with 3 meter
of diameter for presenting layered images in
Intelligent Modeling Laboratory of the University of
Tokyo. A design drawing and actual appearance of
display are shown in Figure 13. The layered images
were integrated into a projection image. Then the
image was projected from the floor just under the
screen. We performed direct fusion of real-image
layer on the display by using depth information.
Figure 11: (a) Design drawing. (b) Appearance of dome
display.
4 DISCUSSION
Two major problems occurred in implementing the
system. First problem is concerning texture of object.
If object has no texture or too low texture, it is
difficult to detect the motion or degree of focusing.
So position detection becomes unstable. This
problem is also occurred when the object is too
bright or dark. In this case, the object has no texture
because of the saturation of image sensor. To cope
with it, the region enclosed by one object layer.
The next problem is about boundaries of object.
To calculate Fourier transform in Spatio-Temporal
image or the degree of focusing of a point,
information of surrounding area information is
needed in the images. Therefore, in Figure 6 and
Figure 10, the edge of object is larger than real
object size. So to extract objects accurately, it is
necessary to optimize Fourier transform window or
filter size.
5 CONCLUSIONS
We proposed a method to generate multi-layer
contents from real world scene by using Depth from
Focus
and Spatio-Temporal Image Analysis
method. Although some problems mentioned above
are remained, the feasibility of the method was
confirmed.
REFERENCES
T. Ogi, M. Hayashi, 2007, Dome Image Contents based on
Layered Image Representation, ASIAGRAPH 2007 in
Tokyo Proceedings, Vol.1, No.2, pp.113-118, 2007.10.
Takeharu Seno, Masahiro Hayashi, Tetsuro Ogi, Takao
Sato: Virtual Depth Effects for Non-Stereoscopic
Dome Images -The Estimation of the Depth Effects of
the Dome Image by Psychophysics, ASIAGRAPH 2008
in Shanghai Proceedings, Vol.2, No.1, pp.121-126
2008.6.
S. K. Nayar and Y. Nakagawa, 1994, Shape from focus:
An effective approach for rough surface, IEEE
Transaction, On Pattern Analysis and Machine
Intelligence, 16(8):824-831.
A. Pentland, 1987, A new sense for depth of field, IEEE
Transaction, On Pattern Analysis and Machine
Intelligence, 9(4):523-531.
S. Birch_eld and C. Tomasi, 1999, Multiway cut for stereo
and motion with slanted surfaces, in ICCV, pp.489-495.
E. Krotkov and R. Bajcsy, 1993, Active vision for reliable
ranging: cooperating focus, stereo, and vergence,
International Journal of Computer Vision, 11:187–203.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
112
