
USING GRA FOR 2D INVARIANT OBJECT RECOGNITION
T.-H. Sun
1
, J. C. Liu
2
, C.-H. Tang
2
and F.-C. Tien
2
1
Department of Industrial Engineering and Management, Chaoyang University of Technology, Taiwan, R.O.C.
2
Department of Industrial Engineering and Management, National Taipei University of Technology
Section 3, Chung-Hsiao E. Road, Taipei 106, Taiwan, R.O.C.
Keywords: Invariant, KRA, GRA, K-curvature, Part recognition.
Abstract: Invariant features are vital to domain of pattern recognition. This research develops a vision-based invariant
recognizer for 2D object. We perform a recognition method which adopted KRA invariant feature extractor
and used grey relational analysis. The feature extraction is to derive translation, rotation, and scaling-free
features through the sequential boundary and is described with its K-curvature. Our work represents the
object profile with the K-curvature to obtain the position invariant property; and then the transformation of
autocorrelation is to ensure orientation-invariant property. Experimental also reveals that proposed method
with either GRA or MD methods offers distinctiveness and effectiveness for part recognition.
1 INTRODUCTION
Various working environments suggest that
automatic part recognition with invariant properties
is of priority concern issue. Khalil and Bayoumi
(2002a) developed a 2D invariant object recognition
method using continuous wavelet transform and
neural networks. After that, they defined three
invariant functions with dyadic wavelet
transformation of the object boundary to object
recognition (Khalil and Bayoumi 2002b). Zhang et
al. (2003) proposed an invariant 2D object
recognition approach by measuring the geodesic
distance between the observed object and a model in
the shape space. Cao et al. (2004) employed the
direction basis function (DBF) neural networks for
successful invariant object recognition. Kyrki et al.
(2004) utilized a Gabor filter to extract invariant
features for object recognition. Li and Lee (2004)
presented a Hopfield neural network model for
invariant object recognition using projective
transformations and the projective invariance was
embedded into the compatibility constraint for
finding point correspondences such that the problem
was formulated by minimizing the predefined
energy function through a Hopfield network. Huang
et al. (2005) proposed a scheme based on
independent component analysis (ICA) for object
recognition with affine transformation and for affine
motion estimation between video frames.
Sookhanaphibarn and Lursinsap (2006) proposed a
method for extracting the invariant features of a
color image based on the concept of principal
component analysis and a competitive learning
algorithm. Yu and Bennamoun (2007) developed
two complete sets of similarity invariant descriptors
using Fourier-Mellin transform and the analytical
Fourier-Mellin transform frameworks, and then
adopted 2D-PCA to simplify the invariant descriptor
for face recognition. Sun and Tien (2007) proposed
an invariant object recognition method by
incorporating the eigenvalue of covariance matrix
and autocorrelation with backpropagation neural
networks.
Using object profiles for object recognition is
one of the major fields in pattern recognition.
Therefore, boundary descriptor becomes an
important role to represent objects’ profiles.
Curvature, defined as the change rate of the slope,
has been widely employed in different applications
such as shape representation, feature extraction,
corner detection and object recognition. Different
numeric curvature estimation approaches have been
discussed in literature. Rosenfeld and Johnston
(1973) initially defined curvature as a K-cosine
function, where K denotes a region of support on the
boundary. Sohn et al. (1994) expressed curvature
with a formula involving its first- and second-order
directional derivatives. Tsai (1997) computed
108
Sun T., Liu J., Tang C. and Tien F. (2009).
USING GRA FOR 2D INVARIANT OBJECT RECOGNITION.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
109-112
DOI: 10.5220/0001958101090112
Copyright
c
SciTePress
directly the curvature by measuring the first- and
second-order derivatives of the continuous
functions. Later, Tsai et al. (1999) employed the
eigenvalue of covariance matrices to measure the
curvature and detect the sharp corners in a contour.
Tien et al. (2004) applied K-curvature to represent
the boundary of microdrills in order to detect the
defects. Sun (2008) adopted K-cosine to detect
corner of 2D digital objects in order to conduct
industrial inspection.
This study proposes a position, orientation, and
scale-invariant 2D object recognition method which
adopted a so-called KRA invariant feature extractor
and used grey relational analysis to recognize
objects.
2 GREY RELATIONAL
ANALYSIS
2.1 Grey Relational Analysis
Grey system theory (GTS) was first initiated by
Deng in 1982 (Deng, 1982; Deng, 1989). The
fundamentals of GRA can found in Chang and Yeh
(2005) and Jiang et al. (2002). The basic idea of
GRA is a ranking scheme that ranks the order of the
grey relationship among several subsystems. Jiang et
al. (2002) proposed a machine vision-based IC
marking identification using GRA. Chang and Yeh
(2005) developed a clustering algorithm based on
GRA. Song and Jamalipour (2005) developed a
network selection scheme that comprised AHP and
GRA for an integrated cellular/wireless LAN
system. Yeh and Chiang (2005) incorporated grey
relational analysis into the ART-2 network to
construct a GreyART network. Chen et al. (2007)
proposed a data-mining-based learning performance
assessment scheme by combining four
computational intelligence theories, including gray
relational analysis (GRA), K-means clustering
scheme, fuzzy association rule mining, and fuzzy
inference, in order to identify the learning
performance assessment rules using the gathered
Web-based learning portfolios of an individual
learner. Kung and Wen (2007) used six financial
indicators to classify twenty items of financial ratios
as research variables through the Globalization Grey
Relational Analysis (GRA), to find the significant
financial ratio variables and other financial
indicators affecting the financial performance of
venture capital enterprises. Hunag et al. (2008)
examined the potentials of the software effort
estimation model by integrating a genetic algorithm
(GA) to the GRA.
3 PROPOSED METHOD
The objective of this study is to develop an invariant
2D object recognition method for 2D object. The
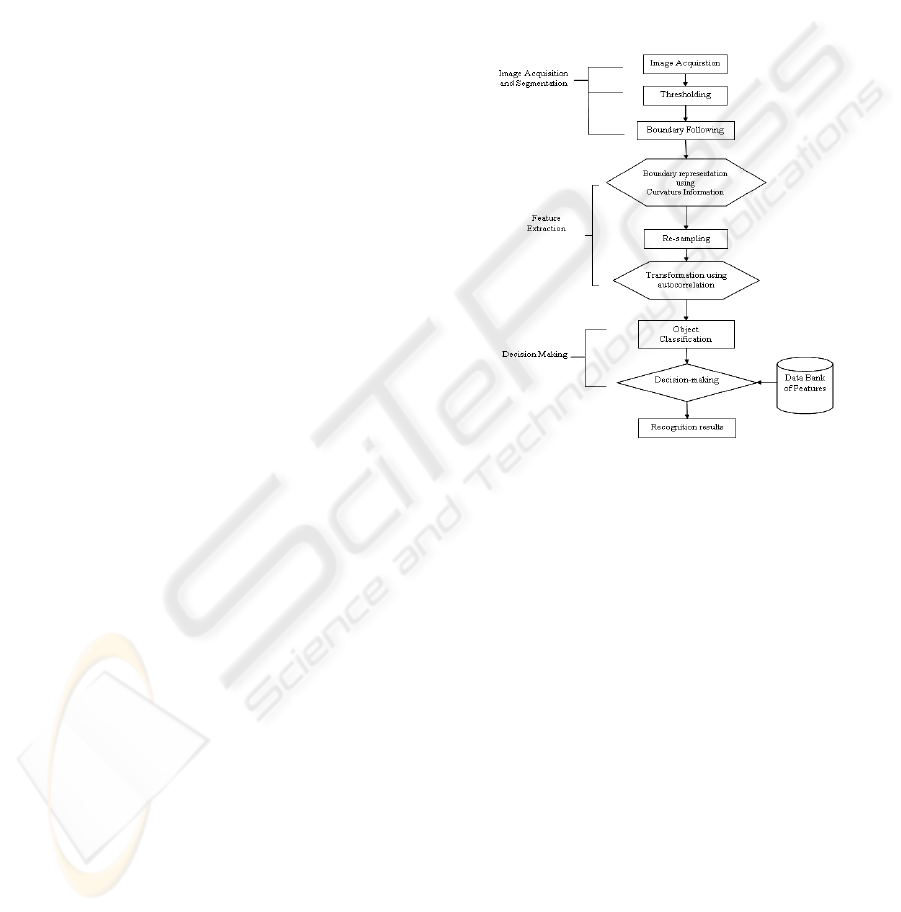
framework of the proposed method is broadly
divided into: image acquisition and segmentation,
boundary representation and feature extraction, and
decision making, as shown in Figure 1.
Figure 1: Flow of the proposed method.
3.1 Image Acquisition
and Segmentation
Image acquisition is to acquire the digital
information of objects through a digitizer. Once
images are acquired, the image segmentation
procedure separates the digitized object from its
background. Thresholding is one of the most
commonly used methods for segmentation, in which
each pixel is converted into a binary value using a
pre-specified value (T). Pixels whose grey values are
higher than the threshold are given the binary value
255 (white), while pixels whose grey values are
lower than the threshold are given the binary value 0
(black). The thresholding process is usually
conducted using the following rule (Gonzalez and
Woods, 2003)
⎩
⎨
⎧
<
≥
=
Tjif
Tjif
jif
a
),( if 0
),( if 255
),(
(1)
where f(i, j) is the grey value at coordinates (i, j);
f
a
(i, j) denotes the new grey value after
USING GRA FOR 2D INVARIANT OBJECT RECOGNITION
109
segmentation; and T is the specified threshold. After
that, the boundary following algorithm is used to
extract the boundary information and store them in a
sequential array.
3.2 KRA Feature Extractor
The proposed KRA feature extraction is to derive
translation, rotation, and scaling-free features
through the sequential boundary.
3.2.1 Boundary Representation using
K-Curvature
K-curvature (also called K-cosine) is a curvature-
based boundary descriptor developed by Rosenfeld
and Johnston (1973). Accordly, the K-curvature (or
say K-cosine) is defined as below.
<Definition > K-curvature
Given an object whose boundary is defined by
S={ P
i
| i=1, 2, 3, …, m}, the curvature (K-cosine) of
each boundary point P
i
is defined as
() ()
() cos
() ()
ii
ii
ii
aK bK
cK
aK bK
θ
⋅
==
⋅
K
K
K
K
(2)
As depicted in Figure 4,
)(Ka
i
K
=
P
K
i+K
−
P
K
i
,
)(Kb
i
K
=
P
K
i−K
−
P
K
i
, θ denotes the angle between
)(Ka
i
K
and
)(Kb
i
K
, and K is a natural number (N).
3.2.2 Re-sampling of K-Curvature
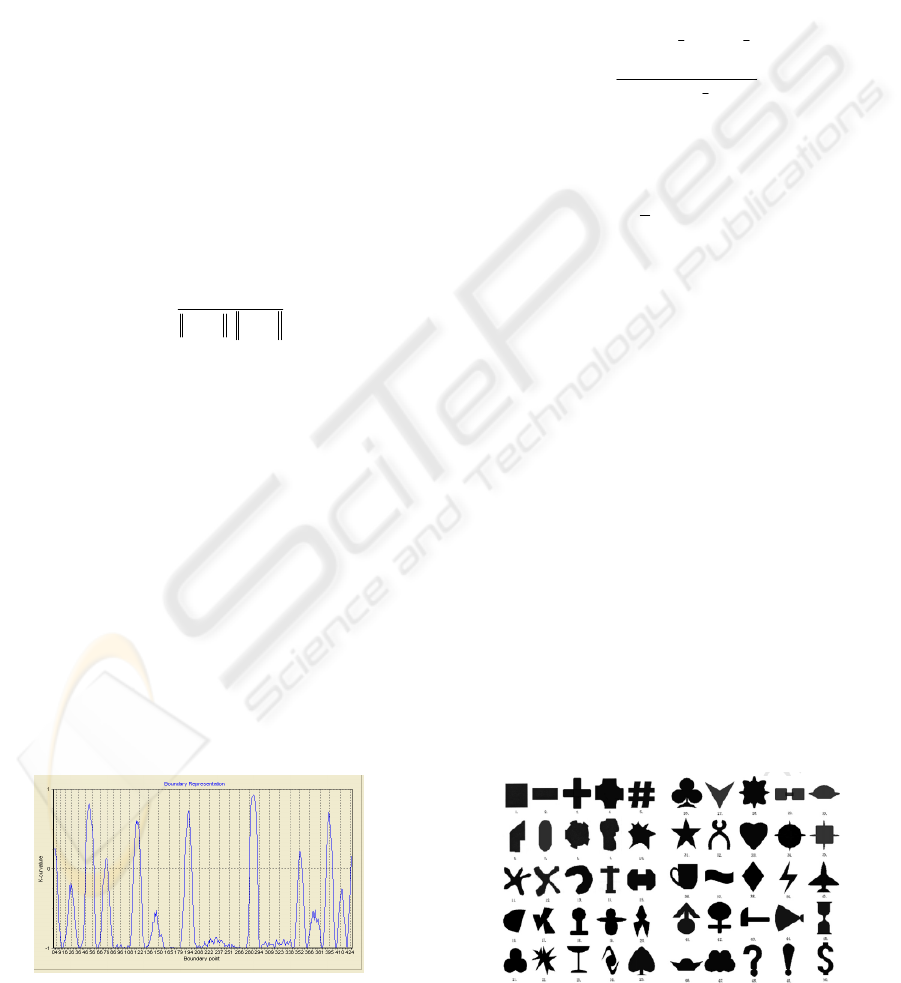
The boundary representation derived previously is
scale dependent. Figure 2 shows the boundary
representation of the original object (912 points)
when the size is reduced to 1/4 (428 points). The
total number of boundary point is approximately
reduced to 1/2, but its profile remains similar. Thus,
this study re-samples the boundaries of digital
objects with different scales and converts them into
the same number such that the scaling-invariant
property is obtained. This process is achieved by
simply sampling the K-curvature proportionally to
the numbers of c
i
(K) extracted.
Note: Totally, there are 428 boundary points (s=30)
Figure 2: Boundary representation with different scales.
3.2.3 Autocorrelation Transformation
Autocorrelations have been widely used features for
1D and 2D signal classification in a range of appli-
cations such as character recognition, texture
classification, face detection and recognition, signal
classification and so forth (Popovici and Thiran,
2004). Autocorrelation coefficient provides
important information about matching pattern in
time series data. The formula of autocorrelation
coefficient of time lag L is as follow:
1
2
1
(r)( r)
(r)
nL
t
L
n
t
ttL
t
rr
r
ρ
−
=
=
+
−
−
=
−
∑
∑
(3)
where
K
ρ
denotes autocorrelation coefficient, L is
the length of the time lag (L =1, 2,…, n); n is the
number of observations; r
t
denotes the value of the
variable at time t; and
r
denotes the mean of r
t
.
4 IMPLEMENTATION
The proposed method was implemented on a
personal computer (PC) with a USB controlled X-Y
Table and 2D objects were digitized through a
black/white CCD connected to a frame grabber.
Fifty synthetic testing images were first scanned at
resolution 640 × 480 (pixels) as shown in Figure 4
for verification. For each standard pattern, 10 test
patterns with various positions (T
1
, and T
2
,
randomly), orientations (30°, 60°, 90°, 150°, 200°,
300°) and scales (S
1
=1/4 reduction, 50% and S
2
=1/8
reduction
,
25%) were created. Therefore, there were
500 test patterns for validation. All standard and test
patterns then were segmented with a pre-determined
threshold and stored as binary images. For the image
pre-processing such as color image thresholding and
boundary following, the library of e-Vision image
processing software (EasyAccess 6.5) was used. The
rest of the recognition processes were implemented
Figure 3: Standard part patterns and testing images.
ICEIS 2009 - International Conference on Enterprise Information Systems
110

93
94
95
96
97
98
99
100
10 20 30 40 50 60 70 80 90 100
Number of Testing Images
Recognition Rat
e
GRA
MD
Figure 4: Recognition trends of different methods.
in C++ language under Borland C++ Builder 6.0
environment.
An experiment was conducted to demonstrate the
effect for the proposed two classifiers when the
number of the testing objects increased from 10 to
100 to reveal the effect of number of objects.
Combining synthetic and real object images, the
study had 1000 testing images for validation. The
experimental results is shown in Figure 4.
Accordingly, the GRA-based method outperformed
minimum distance method (MD), even though the
MD method still owned 95% of recognition rate
when the number of patterns reaches 100.
5 CONCLUSIONS
Deriving invariant features is a crucial task in the
area of pattern recognition. This study proposes a
new translation, rotation, and scaling-free 2D object
recognition method, which adopts K-curvature
boundary representation to derive position-invariant
property, re-sampling to achieve scaling-invariant
property, and autocorrelation transform to obtain
orientation-invariant property. In addition, the
proposed method incorporated with Grey Relational
Analysis method to recognize the 2D digital objects
with a high recognition rate. A set of fifty synthetic
images, each of them was acquiring with ten
different positions, orientations and scales, were
used for validation, and another fifty real objects
were obtained for validation. Experimental results
also reveal that the proposed method with either
GRA or MD methods is effective and reliable for
part recognition. Conclusively, the proposed KRA
feature extractor incorporated with GRA classifier,
not only successfully obtained position, orientation,
and scaling- invariant features, but also classified the
features in an excellent performance. It is also
expected that the proposed method may be applied
to various applications such as part sorting,
automated visual inspection, robot positioning,
control and monitoring system.
REFERENCES
Cao, W., Hao, F., & Wang, S. (2004). The application of
DBF neural networks for object recognition.
Information Sciences, 160, 153–160.
Chang, K.-C., Yeh, M.-F. (2005). Grey relational analysis
based approach for data clustering, IEE Proc.- Vis.
Image Signal Process 152 (2), April 2005, 165-172.
Chen, C.-M.; Chen, Y.-Y., Liu, C.-Y. (2007). Learning
Performance Assessment Approach Using Web-Based
Learning Portfolios for E-learning Systems. IEEE
Transactions on Systems, Man, and Cybernetics, Part
C: Applications and Reviews 37 (6), 1349 – 1359.
Deng, L.-L. (1982). Control problems of grey systems,
Systems and Control Letters 5(1), 288-294.
Deng, J.-L. (1989). Introduction to grey system theory,
Journal of Grey System 1, 1-24.
Huang, X., Wang, B., Zhang, L. (2005). A new scheme for
extraction of affine invariant descriptor and affine
motion estimation based on independent component
analysis. Pattern Recognition Letters, 26, 1244–1255. 499
Jiang, B.C., Tasi, S.L, Wang, C.C. (2002), Machine
vision-based grey relational theory applied to IC
marking inspection, IEEE Transaction on
Semiconductor Manufacturing 15 (4), 531-530.
Jones, G., III, & Bhanu, B. (2001). Recognizing
articulated objects in SAR images. Pattern
Recognition, 34, 469–485.
Khalil, M. I., & Bayoumi, M. M. (2002a). Affine
invariants for object recognition using the wavelet
transform. Pattern Recognition Letters 23, 57–72.
Khalil, M. I., & Bayoumi, M. M. (2002b). Invariant 2D
object recognition using the wavelet modulus maxima.
Pattern Recognition Letters, 21, 863–872.
Kung, C.-Y., Wen, K.-L. (2007). Applying Grey
Relational Analysis and Grey Decision-Making to
evaluate the relationship between company attributes
and its financial performance- A case study of venture
capital enterprises in Taiwan. Decision Support
Systems Volume: 43, Issue:3, April, 2007, pp.842-852
Kyrki, V., Kamarainen, J.-K., and Kavianen, H. (2004).
Simple Gabor feature space for invariant object
recognition. Pattern Recognition Letters, 25, 311–318.
Li, W., and Lee, T. (2004). Projective invariant object
recognition by a Hopfield network. Neurocomputing,
30, 1–18.
Popovici, V., & Thiran, J.-P. (2004). Pattern recognition
using higher-order local autocorrelation coefficients.
Pattern Recognition Letters, 25, 1107–1113.
Rosenfeld, A., Johnson, E. (1973), Angle detection on
digital curves, IEEE Transactions on Computers C-22,
875-878.
Sohn, K., Alexander, W.E., Kim, J.H., Snyder, W.E.
(1994) A constrained regularization approach to robust
corner detection. IEEE Transactions on Systems, Man,
and Cybernetics. 24 (5), 820-828.
Song Q.Y., Jamalipour, A. (2005). Network selection in an
integrated wireless LAN and UMTS environment
using mathematical modeling and computing
techniques. IEEE Wireless Communications 12(3), 42- 48
USING GRA FOR 2D INVARIANT OBJECT RECOGNITION
111

Sookhanaphibarn, K., & Lursinsap, C. (2006). A new
feature extractor invariant to intensity, rotation, and
scaling of color images. Information Sciences, 176,
2097–2119.
Sun, T.-H. (2008). K-cosine corner detection. Journal of
Computers. In press.
Sun, T.-H., Tien, F.C. (2007). Invariant 2D object
recognition using eigenvalues of covariance matrices,
re-sampling and autocorrelation, Expert Systems with
Applications, doi:10.1016/j.eswa.2007.08.106
Tien, F. C., Yeh, C. H., & Hsieh, K. H. (2004). Automated
visual inspection of microdrill for PCB production.
International Journal of Production Research, 15(42),
2477–2495.
Tsai, D.M. (1997). Boundary-based corner detection using
neural networks, Pattern Recognition 30 (1), 85-97.
Tsai, D. M., Hou, H.-T., & Su, H.-J. (1999). Boundary-
based corner detection using eigenvalues of covariance
matrices. Pattern Recognition Letters, 20, 31–40.
Yeh, M.-F., Chiang, S.-S. (2005). GreyART network for
data clustering. Neurocomputing 67, 313-320
Yu, H., & Bennamoun, M. (2007). Complete invariants for
robust face recognition. Pattern Recognition, 40,
1579–1591.
Zhang, J, Zhang, X, Krim, H., Walter, G.G. (2003), Object
representation and recognition in shape spaces, Pattern
Recognition 36, 1143-1154.
ICEIS 2009 - International Conference on Enterprise Information Systems
112
