
A GESTURAL INTERFACE FOR ORCHESTRAL CONDUCTING
EDUCATION
Lijuan Peng and David Gerhard
Computer Science, University of Regina, Regina, Saskatchewan, Canada
Keywords: Computer-based conducting system, Drill and practice, Gestural interface, Pedagogy, Visual representation.
Abstract: Over the past few years, a number of computer-based orchestral conducting systems have been designed
and implemented. However, only a few of them have been developed to help a user learn and practice
musical conducting gestures. This paper is intended to address research related to this area. It utilizes an
infrared baton and an acceleration sensor to track the standard conducting gestures. The infrared baton is
similar to a conducting baton and has little influence on the conducting. A drill and practice instructional
strategy has been applied in this gestural interface. Five options are implemented. Once an option is chosen,
users must conduct according to the supported conducting gestures. While a student is conducting, his/her
gestures are identified and followed by the system using an accurate and relatively simple process. The
conducting is interpreted using a few visual items that clearly show a conducting gesture and reveal its
quality. In addition, aural representation informs students of beats or errors when eyes are busy.
1 INTRODUCTION
Since the 1980s, various computer-based conducting
systems have been developed (
Nintendo, 2006)
(
Satoshi, 1998) to allow a student to conduct a piece
of music using a digital system. Most of these
systems focus on the act of conducting instead of
gestures or education. Visual representation as a
straightforward interpretation for a gesture has only
been implemented in one system (
Guy, 1999). The
research described here is intended to present a
gestural interface that is designed and implemented
for pedagogy. It presents both visual and aural
representations for students.
2 RELATED RESEARCH
2.1 Instructional Strategies
As computer and electronic instruments spread,
computer-based musical systems have been a
supplement to traditional teaching approaches (e.g.
printed music notation). Several instructional
strategies, such as programmed learning and drill
and practice, have been used. A system supporting
programmed learning presents some questions and
gives feedback to students’ answer according to
expected one. Drill and practice let students do some
pre-designed activities repeatedly. (
Brandao, 1999)
2.2 Visual Representation of Musical
Parameters
Although it is natural for music education systems to
provide aural responses, since music is based on
hearing, aural responses can interfere with music
being used as an exercise or target. Therefore,
visual representation is also supported in many
music education systems. It is important to note,
however, that visual feedback can interfere with the
learning of visual aspects of music in the same way.
In an example of visual feedback, pianoFORTE
(
Stephen, 1995), a system for piano education, utilizes
different colors and shapes on the original score to
show the difference between the performance of
teachers and students.
2.3 Computer-based Conducting
Systems
A few current conducting systems have a
pedagogical purpose. For example, Wireless sensor
interface and gesture follower (
Frederic, 2007) was
406
Peng L. and Gerhard D. (2009).
A GESTURAL INTERFACE FOR ORCHESTRAL CONDUCTING EDUCATION.
In Proceedings of the First International Conference on Computer Supported Education, pages 406-409
DOI: 10.5220/0001967904060409
Copyright
c
SciTePress

designed to find problems in a student's gesture
compared to a teacher's gesture.
Various sensors have been used in computer-
based conducting systems. Acceleration sensors
(
Satoshi, 1998) can be equipped on baton-like
devices, which may change the weight and balance
of the controller. Cameras (Paul, 2004) capturing the
front view of a conductor can show a 2-dimensional
trajectory of a conductor's motions. Infrared sensors
(Guy, 1999) only track the movement of infrared
light sources thus avoiding the influence of
background or other confounding visual objects. In
addition, other sensors, such as the Wii Remote
(
Nintendo, 2006), have been used for conducting.
3 INSTRUCTIONAL
STRATEGIES
The gestural interface presented in this paper is
designed for learning and practicing conducting
gestures. Currently, drill and practice has been used.
Once an option (there are five options in all.) is
chosen, students can repeat a certain conducting
gesture to practice it. The feedback from the system
lets students know the accuracy of the gestures.
4 DESIGN AND
IMPLEMENTATION
This gestural interface has five aspects: tracking,
analysis, recognition, following, and response.
The implementation is on an iMac personal
computer using Max/MSP, Jitter, and Java. Once the
system is run, a main window (Figure 1) is shown on
the screen. It displays the menu, the conducting
window, and the information related to tempo and
dynamics. The visual feedback is also displayed on
this main window.
For the right hand, there are two modes: the
option selection mode and the conducting mode. The
“Menu” bar is used to go back to the menu area
(option selection mode). In the menu, if students
stay on an option, for example 2-Beat, for a period
of time, the focus will be moved back to the
conducting window (the conducting mode). An
infrared baton is used as both a mouse and an
infrared light source. Thus, a lot time is saved on the
switch between system manipulation and
conducting.
Figure 1: A snapshot of the main window.
4.1 Gestures
When conducting, the movements of both the right
hand and the left hand are located in a chest-high
virtual rectangle named the conducting window.
For the right hand, this gestural interface focuses
on expressive legato gestures (continuous, curved)
as shown in Figure 2 (
Joseph, 2000) (Brock, 1989). It
can be extended to support other beat patterns.
Figure 2: 2-beat pattern, 3-beat pattern, and 4-beat pattern.
For the left hand, the gestures to show dynamics
are supported. When the left hand is held with the
palm facing up, it means louder. The palm facing out
means softer playing.
4.2 Gesture Tracking
The system described in this paper uses an infrared
sensor because it has higher sensitivity and less
computation time compared to systems using a video
camera, and data captured by an infrared sensor is
easier for visualization compared to those collected
by an acceleration sensor.
The infrared baton (Figure 3) used in this
gestural interface consists of a conducting baton, an
infrared LED (110 degrees viewing angle), a button,
and a battery. During conducting, a student holds the
infrared baton in the right hand like holding a real
conducting baton and presses the baton using his/her
thumb. Thus, it is not difficult for a student to learn
to use. A Wii Remote (Figure 4) is employed as an
infrared camera in front of a student. An acceleration
A GESTURAL INTERFACE FOR ORCHESTRAL CONDUCTING EDUCATION
407
sensor named WiTilt v2.5 (Figure 4) is applied to
capture the movement of the left hand.
Figure 3: The infrared baton.
Figure 4: Wii Remote (from (Wii, 2008)) and WiTilt v2.5.
4.3 Gesture Analysis
The features for the right hand consist of coordinates
and beats. Coordinates of the tip of a baton at each
time are used to generate beats, fundamental
components of a beat pattern. Figure 2 shows that a
beat always occurs at the vertical minimum of a
movement. A beat detection algorithm is developed
to detect the peaks and troughs of a trajectory.
The results of gesture analysis are displayed as
shown in Figure 1. All coordinates are small dots. A
trough (beat) is represented with a larger dot. Thus,
it is easy for a student to visually differentiate one
feature from another. A curve connects these dots
and represents the trajectory of the movement. The
result is a quantitative interpretation which shows
students exactly what their gesture looked like, and
can be compared to a reference gesture from a
teacher or textbook.
For the left hand, 3-dimensional acceleration
data are features and will be used directly in gesture
recognition/following.
4.4 Gesture Recognition
4.4.1 Task-target Gestures
The first gesture recognition is able to tell whether a
beat pattern is conducted correctly or not on the
basis of an assumption that the beat pattern is known
beforehand. It is reasonable because the conductor
and performers in an orchestra have the score that
indicates the time signature. Currently, it only
supports 2-beat, 3-beat, and 4-beat per measure. It is
not difficult to extend to other patterns.
Initially, the downbeat is detected as a downward
motion based on horizontal coordinate comparison
and represented visually by a vertical line.
Subsequent beats are then detected according to their
coordinate position relative to the downbeat. The
recognized result is displayed on the upper left side
of the conducting window as shown in Figure 1.
The accuracy of this recognition depends on the
downbeat identification and the quality of other
beats. If the student performs the gesture correctly,
the system recognizes it and rewards the student.
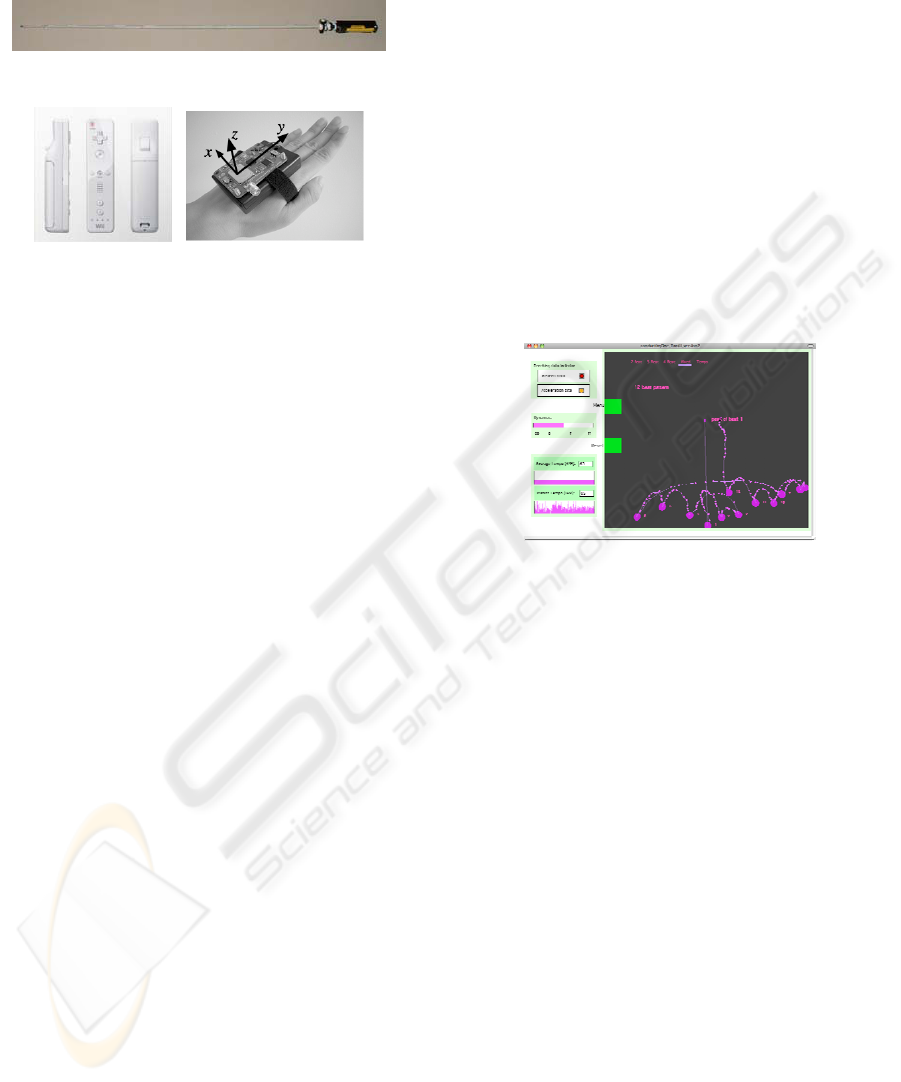
4.4.2 Free-form Conducting Gestures
The second recognition is a more general one,
allowing the student to conduct any beat pattern. The
downbeat is detected first, as for the task-target
gestures, and then the number of beats is
accumulated until the next downbeat is found. The
amount of beats reveals the beat pattern performed.
Figure 5 shows an example of 12-beat patterns.
Figure 5: An example of 12-beat pattern.
The downbeat of a subsequent gesture affects the
recognition accuracy because an incorrect downbeat
does not stop the beat counter. As a result, the
number of beats increases until a beat is identified as
a downbeat.
4.5 Gesture Following
4.5.1 Tempo Tracking
Tempo tracking reveals the speed of conducting,
enabling a student to practice consistent timing.
Each time a beat occurs, the value of the tempo will
be calculated using beats per minute (BPM). Both
average and instant values are supported. The
average value is a moving average and estimated
based on the past 10 beats. Therefore, it can follow
the changes, especially the significant changes, in
tempo quickly and also show the speed trend of
conducting clearly. The instant value is intended to
show current speed of conducting.
There are two representations for the value of the
tempo (Figure 5). The numerical tempo value is a
value at a certain time. The diagram clearly shows
CSEDU 2009 - International Conference on Computer Supported Education
408

the changes of the tempo in terms of remaining
steady, the increase, and the decrease.
An experiment was performed to demonstrate the
accuracy of the tempo tracking system. Individuals
were asked to conduct a piece at a specific tempo
measured in real time. Results are shown in Table 1.
Table 1: Comparison between the calculated average
tempo and the real average tempo.
4.5.2 Dynamics Tracking
Dynamics tracking is for the left hand and done on
the basis of 3-dimensional accelerometer values
measuring tilt. As the orientation of the left hand
changes, the tilt values change corresponding to the
intended change in dynamics. A particular hand
position equates to a specific dynamic, and the
recognized result is shown using a slider, which is a
conventional visual representation for the volume
and easy to understand for students.
4.6 Response
In this gestural interface, visual and aural feedback
are presented once a gesture is recognized.
Visual representation is intended to present a
more direct interpretation to gestures and can be
compared to that of a teacher’s or a diagram on a
textbook. It may be easier for students to adjust and
improve their gestures.
Aural representation consists of playing a certain
tone corresponding to the recognition of a certain
beat. For example, C4 will be played when the
downbeat is found. This kind of aural representation
gives students the feedback they need while
conducting, but does not require them to keep their
eyes on the screen. Correct gestures and errors are
identified this way. This aural representation also
allows professionals and instructors to use the
system as they conduct a real orchestra.
5 CONCLUSIONS
This gestural interface aims to help conducting
students learn and practice conducting gestures. The
Wii Remote is not expensive and easy to acquire.
Students do not need to spend time learning how to
manipulate the whole system because real
conducting gestures are employed with an infrared
baton, which is similar to a real baton. Both visual
and aural representations are presented to students.
The process of gesture recognition and following is
simple, fast, and accurate.
REFERENCES
Brandao M., Wiggins G., Pain H., 1999. Computers in
music education. In Proceedings of the AISB'99
Symposium on Musical Creativity.
Brock McElheran, 1989. Conducting technique for
beginners and professionals revised edition, Oxford
University Press.
Frederic Bevilacqua, Fabrice Guedy, Norbert Schnell,
Emmanuel Flety, Nicolas Leroy, 2007. Wireless
sensor interface and gesture-follower for music
pedagogy. In Proceedings of the 7th international
conference on New interfaces for musical expression.
Pages 124-129.
Guy E. Garnett, Fernando Malvar-Ruiz, Fred Stoltzfus,
1999. Virtual conducting practice environment. In
Proceedings of the International Computer Music
Conference. ICMA. Pages 371-374.
Joseph A. Labuta, 2000. Basic conducting techniques,
fourth edition, Prentice Hall.
Nintendo, 2006. Wii Music Orchestra.
http://www.gamespot.com/wii/puzzle/wiimusicorchest
ra/index.html. Retrieved May 18, 2008.
Paul Kolesnik, 2004. Conducting gesture recognition,
analysis and performance system. Master's thesis,
McGill University.
Satoshi Usa, Yasunori Mochida, 1998. A multi-modal
conducting simulator. In Proceedings of the
International Computer Music Conference. ICMA.
Pages 25-32.
Stephen W. Smoliar, John A. Waterworth, Peter R.
Kellock, 1995. pianoFORTE: a system for piano
education beyond notation literacy. In
MULTIMEDIA'95: Proceedings of the 3rd ACM
International Conference on Multimedia. ACM Press.
Pages 457-465.
The Wii Remote,
http://www.nintendo.com/wii/what/controllers/remote,
Retrieved May 18, 2008.
Amount
(2-beat)
Calculated tempo
by the system
(BPM)
Real tempo by a
stopwatch (BPM)
15 115.38 115.68
30 99.45 100.19
45 128.27 128.85
A GESTURAL INTERFACE FOR ORCHESTRAL CONDUCTING EDUCATION
409
