
DESIGN OF SERVO SYSTEM IN STATE SPACE USING
DISTANCE LABORATORY SYSTEM (DLS)
Iván Santana Ching, Luis Hernández Santana
Departamento de Automática y Sistemas Computacionales, Universidad Central “Marta Abreu” de Las Villas
Carretera a Camajuani Km. 5 ½, Santa Clara, Cuba
Manuel Ferre, Rafael Aracil
Departamento Automática, Ingeniería Electrónica e Informática Industrial
Universidad Politécnica de Madrid, Madrid, Spain
George Eisendrath
Free Universty of Brussels, Brussels, Belgium
Keywords: Distance Learning, Control Education, Remote Laboratories, Learning Management Systems.
Abstract: During last decade, the Internet has been increasingly used for education and research purposes. As
traditional face to face classroom became virtual classroom through Internet, traditional hands-on
laboratories converted as remote and virtual laboratories that are at a technological crossroad. At previous
papers was presented a Distance System Laboratory (DSL), developed for the purpose of teaching automatic
control systems. The system consists of three parts, the user interface, the practices management and the
practice processing. The developed DSL system allows users (i) learning and adjusting predefined
controllers, (ii) designing new controllers, and (iii) testing and analyzing the performance of the
predefined/designed controllers over a set of physical devices. Some technological update was made to
DLS, than increase the performance and security of the system. In this paper is described an application of
DLS through one case study practices of design of servo system in state space in the Control System
discipline.
1 INTRODUCTION
The use of simulation tools for education and
training has been increasingly becoming popular,
mainly due to the high cost of maintaining and
operating laboratories equipments. However, despite
their advantages being low cost and relatively easy
to use, the simulators do not simulate efficiently,
noise, frequency responses, D/A conversion and
other physical phenomena that characterize real
systems. (Hites, 2002).
The emergence of the Web in the mid-1990 has
added new opportunities for sharing expensive
resources of software and hardware. This allowed
the development of virtual (Anido and Fernández,
1999) and remote control (Ko et al., 2005)
applications, offering the capabilities and
flexibilities of simulation tools, without losing the
important characteristics of physical systems (Puerto
et al., 2005), and hence distance laboratory
applications. Remote experimentation facilities
offered as part of a web-based learning approach,
affords a number of critical benefits and for
engineering distance education courses it is the only
realistic method of performing many experiments.
This approach allows remotely located students to
complete laboratory assignments unconstrained by
time or geographical considerations facilitating the
development of skills in the use of real systems and
instrumentation (Callaghan et al., 2007).
In (Gravier et al., 2008), the authors provide a
literature review of modern remote laboratories and
identify possible evolutions for the next generation
of remote laboratories. Remote laboratories are
296
Santana Ching I., Hernández Santana L., Ferre M., Aracil R. and Eisendrath G. (2009).
DESIGN OF SERVO SYSTEM IN STATE SPACE USING DISTANCE LABORATORY SYSTEM (DLS).
In Proceedings of the First International Conference on Computer Supported Education, pages 296-300
DOI: 10.5220/0001971002960300
Copyright
c
SciTePress

under a strong current of evolution and are not
restricted to a single educational topic, where
Automatics and Robotics are ones of the most used.
In the majority of cited remote control
experiments, remote users can run an experiment
and adjust the process or controller parameters from
a set of predefined controllers. This limits the
practice to some type of controllers (PI, PID, space
of state, etc.). The Automatic Control Telelab (ACT)
enables students to choose a control law, change the
control parameters online, and even design their own
controller (Casini et al., 2007). Our developed
Distance Laboratory System (DLS) allows learning
and adjusting predefined controllers, designing new
controllers, and testing and analyzing the
performance of the predefined/designed controllers
over a set of physical devices. This has been made
possible by using Matlab-Simulink, very well known
software in the Automatic Control community
(Sartorius et al., 2005). At this stage of development,
our DSL allows several practices for the control of
direct current motor and control of a robot
manipulator. (Hernández et al., 2006).
2 CHARACTERISTICS OF THE
SYSTEM
The DLS is a distance laboratory system allowing
the users to learn how to adjust predefined
controllers and to design their own controllers in
order to test them in real devices through Internet.
2.1 Characteristics of Distance
Laboratories
DLS exhibits some features in common with most
distance laboratories in operation at present easiness,
availability and accessibility. Some additional
characteristics like easy and fast user interface,
management of multiple requests in parallel form,
controller development using MATLAB and Simulink
in a remote way, reference change are given in
(Sartorius et al., 2005). Various technological
updates were made to DLS improving the
performance and security.
The interface is based on HTML pages that use
JavaScript and now uses PHP functions. A video
feedback of the carrying out practices was
incorporate to the Web interface. The integration
with a pedagogical platform Moodle, was made too.
One of the most important features of DLS is the
management of multiple requests in parallel form.
The SLD allows to take care manifold request in a
parallel form managing centralized similar devices
that are separated geographically but connected by
(WAN).
2.2 DLS Architecture
In (Sartorius et al., 2005) is presented the DLS
architecture. That architecture was update, the CGI
located in the Web server was change for a Web
Services developed with PHP technologies. On the
other hand, in the Practice Management Client
(PMC) was introduced another Web Services that
permit communicate those parts via Web better than
TCP/IP. The actual architecture is show in Figure 1.
Figure 1: Software and hardware level architecture of
DLS.
Now, the communications port used is an
standard HTTP 80 port, rather than non-standard
TCP/IP random ports, that can be blocked by
firewalls. The system follows similar double client-
server architecture as describe in (Yan et al., 2006).
The DLS is divided into three parts: user
interface, practices management and practices
processing. The users interact with the system
through Internet. When accessing to the system Web
site, first the users must register by giving their
username and password and then choose the practice
they want to carry out. There the user can fill all the
data in the form associated to the practice in a
correct way and finally choose whether to carry out
the practice in a simulated or a real way.
The Web Service Practice Management Server
(PMS) receives the data and verifies which
workstation can carry out the practice order and
sends the order to the Web Services Practice
Management Client (PMC) located in the available
workstation. When the order arrives at the PMC, the
data are processed and the practice is carried out
using Matlab-Simulink together with Real Time
Workshop (RTW) Toolbox. Once the practice has
DESIGN OF SERVO SYSTEM IN STATE SPACE USING DISTANCE LABORATORY SYSTEM (DLS)
297

been processed, the response is a Web page showing
the processing results. Throughout the practices
carry out a video feedback with the real process is
showing to the users.
3 DISTANCE LABORATORY
SYSTEM USE
The system permits two types of practices: practices
with a predefined controller and practices with a
controller created by the user.
3.1 Practices with a Predefined
Controller
In this type of practices the users only need a Web
navigator to access the DLS Web site. This type of
page is shown in Figure 2, where it is shown a
practice for testing decoupled PID controller
performance in a robot manipulator with two
degrees of freedom. In addition, the users can
choose two execution ways: (a) a simulated way,
where it is simulated the execution and is obtained
an idealized response of the practice or (b) a real
way.
Figure 2: Web page and form for carrying out the practice
with decoupled PID controller.
3.2 Practices with a Controller Created
by the User
When the users access some practices in which they
can define the controller that they will use, it is
shown a page as the one given in Figure 3.
Figure 3: Web page and form for carrying out practice
with a controller created by the user.
From this page the user can download a Simulink
file containing the practice diagram block. For
carrying out these types of practices the users need
to have the MATLAB-Simulink software installed in
order to modify the downloaded Simulink model, as
it was explained in (Sartorius et al., 2005).
4 TEACHING EXPERIENCE
USING DLS
The DLS has been used in activities of teaching as
well as undergraduate and postgraduate course,
inside and outside our country, standing out the
accesses from Spain and Mexico, with very good
response. In (Hernández et al., 2006) was
summarized some topics, in Automatic Control
Systems education, where the developed DLS could
be effectively used.
At the next section is presented an application of
DLS through one case study practices of design of
servo system is state space in the Control System
discipline.
4.1 Design of Servo System is State
Space
The design of control system by pole-placement is
an interesting topic of Control Engineering subjects
(Ogata, 2006).
We show the practices presented for the student
in the UCLV for the design of servo system in State
Space, using the distance real laboratory (DSL). The
platform, described in the epigraph 2.2, is connected
to a real DC motor.
CSEDU 2009 - International Conference on Computer Supported Education
298
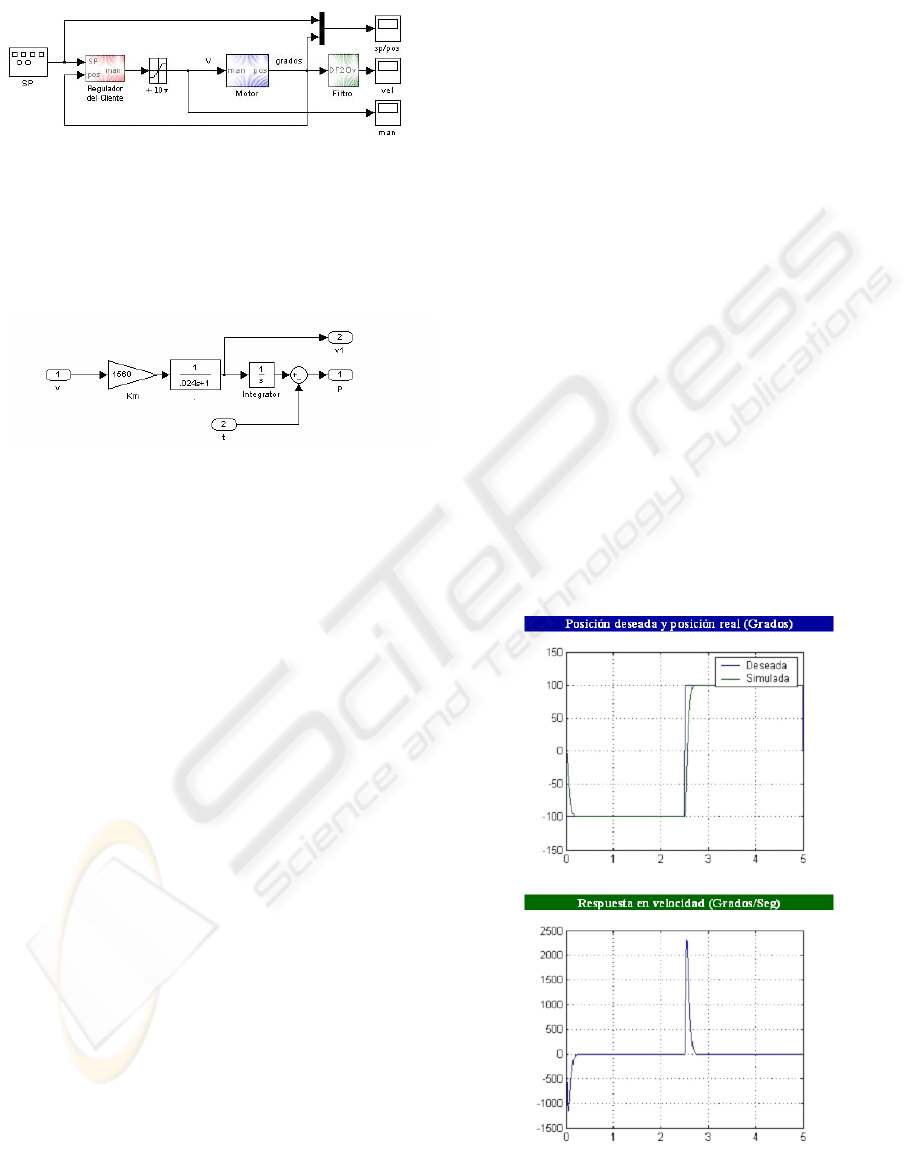
The control system implemented in the DSL has
the block diagram of figure 4.
Figure 4: Block diagram of the control system.
The motor dynamic characteristic, well know by
the student by previous work, are showed in the
figure 5. The real system has an encoder for position
measuring, and the velocity is obtained in the
computer by the derivation of encoder signal.
Figure 5: Block diagram of the motor dynamic
characteristic.
In this case the open loop control system can be
represented by:
BuAxx
+
=
(1)
Cxy =
Where x equal to state vector [
θθ
,
]
T
, motor
velocity and position.
⎥
⎦
⎤
⎢
⎣
⎡
−
=
67.410
00.10
A
⎥
⎦
⎤
⎢
⎣
⎡
=
65000
0
B
[]
01=C
In this case the task of the students is to design
the regulator according to performance index given
by the professors.
4.2 Student’s Task
A typical presentation of student task can have the
form:
Designs of servo system in State Space for the
system of figure 5, with closed loop response to step
input with small overshoot, 0.15 s of setting time and
zero steady-state error.
The students have several possibilities, to make
the design, according (Ogata, 2006) the servo system
pole-placement designs with state observer solution
is the best.
4.3 Student’s Task Solution
The first step is to find the analytical solution.
Following the Ogata method, (Ogata, 2006) we have
to find:
• The wanted close loop poles:
⎥
⎦
⎤
⎢
⎣
⎡
−
=
13.0767i 27.0000-
13.0767i 27.0000-
P
• The regulator gain:
[
]
0002.00138.0
=
K
• The observer gain
⎥
⎦
⎤
⎢
⎣
⎡
=
1.1886
0.0219
*10000Ke
With these values we implement a servo system
pole-placement designs with state observer with
extra integrator (Ogata, 2006) and test the system
solution, first in simulation in the web site with the
result of figure 6.
Figure 6: Simulation response.
DESIGN OF SERVO SYSTEM IN STATE SPACE USING DISTANCE LABORATORY SYSTEM (DLS)
299
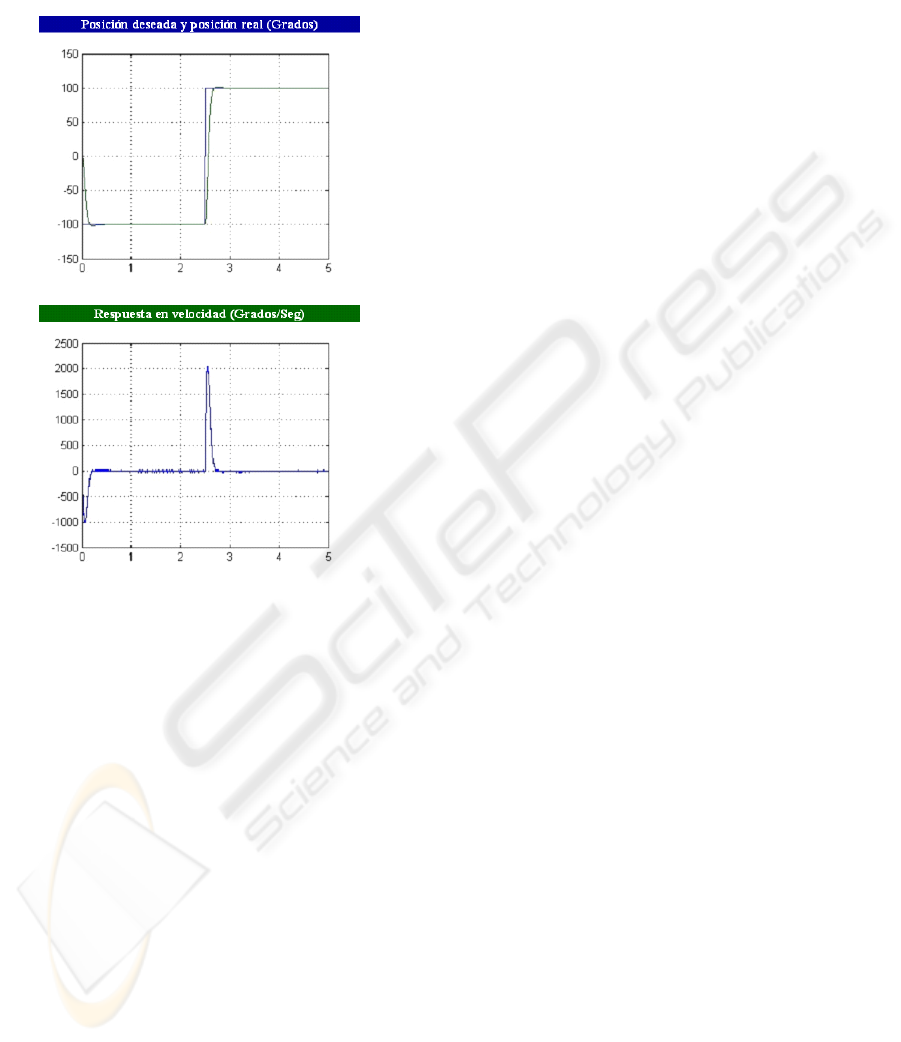
In this case the results of simulation are
according to the analytical analysis and the
following step is test the regulator in the real motor.
The results are showed in the figure 7.
Figure 7: Real response.
5 CONCLUSIONS
In this paper have been presented an updated
Distance System Laboratory (DSL) developed for
the purpose of teaching automatic control systems.
The potential of the developed DSL system like
learning and adjusting predefined controllers and
designing new controllers have been showed. One
case of study of practices with a real motor in the
Control System discipline was presented. In the
paper is demonstrated the capacity of the system to
develop practices work in the topic of servo system
design is State Space, specifically, an example of
servo system pole-placement design with state
observer have been presented with good results.
This example demonstrated the real possibilities of
the DSL for develop real practices in this and others
topics of Automatic Control.
REFERENCES
Anido, L., Llamas, M., Fernández, M. J., 1999. SimulNet:
Building Virtual Teaching Laboratories for the Web.
In Proceedings of 8th International World Wide Web
Conference, Toronto, Canada.
Callaghan, M.J., Harkin, J., Mcginnity, T.M., Maguire,
L.P., 2007. Paradigms in Remote Experimentation. In
International Journal of Online Engineering (iJOE),
Vol. 3, No. 4.
Casini, M., Prattichizzo, D., Vicino,A., 2007. Operating
Remote Laboratories through a bootable device. In
IEEE Transactions on Industrial Electronics, vol. 54,
no. 6, December.
Gravier, C., Fayolle, J., Bayard, B., Ates, M., Lardon, J.,
2008. State of the art about remote laboratories
paradigms – foundations of ongoing mutations. In
International Journal of Online Engineering (iJOE),
Vol. 4, Issue 1, February.
Hernández, L., Sahli, H., Santana, I.., Sartorius, A., Rubio,
E., Abreu, J., 2006. Plataforma para la realización de
actividades prácticas a distancia en tiempo real.
Potencialidades de utilización en la educación
superior. In UNIVERSIDAD 2006, February.
Hites, M., 2002. Creating and Running Undergraduate
Experiments Controlled Through the Internet. In
American Society for Engineering Education,
Chicago, Illinois.
Ko, C. C., Chen, B. M., Chen, J. P., Zhang, J., Tan, K. C.,
2005. A Web-based laboratory on control of a two-
degrees-of-freedom helicopter. In Int. J. Eng. Educ.,
vol. 21, no. 6, pp. 1017–1030.
Ogata, K., 2006. Ingeniería de Control Moderna, Madrid,
España.
Puerto, R., Reinoso, O., Ñeco, R., García, N., Jiménez, L.
M., 2005. RECOLAB: Laboratorio remoto de control
utilizando Matlab y Simulink. In Revista
Iberoamericana de Automática e Informática
Industrial, vol. 2, num.2.
Sartorius, A., Hernández, L., Aracil, R., Rubio, Á.,
Santana, I.., 2005. Platform for distance development
of complex automatic control strategies using Matlab.
In The International Journal of Engineering
Education, special issue on Matlab and Simulink in
Engineering Education, Vol. 21, No. 5, pp. 790 – 797.
Yan, Y., Liang, Y., Du, X., Saliah-Hassane, H., Ghorbani,
A., 2006. Putting Labs Online with Web Services. In
IEEE Computer Society, Vol.: 8, Issue: 2, pp. 27- 34,
March-April.
CSEDU 2009 - International Conference on Computer Supported Education
300
