
SYMBOLIC EXECUTION FOR DYNAMIC, EVOLUTIONARY
TEST DATA GENERATION
Anastasis A. Sofokleous, Andreas S. Andreou and Antonis Kourras
Department of Computer Science, University of Cyprus
75 Kallipoleos Str., P.O. Box 20537, CY1678, Nicosia, Cyprus
Keywords: Search-based test data generation, Symbolic program transformation, Genetic algorithms, Control flow
graphs.
Abstract: This paper combines the advantages of symbolic execution with search based testing to produce
automatically test data for JAVA programs. A framework is proposed comprising two systems which
collaborate to generate test data. The first system is a program analyser capable of performing dynamic and
static program analysis. The program analyser creates the control flow graph of the source code under
testing and uses a symbolic transformation to simplify the graph and generate paths as independent control
flow graphs. The second system is a test data generator that aims to create a set of test cases for covering
each path. The implementation details of the framework, as well as the relevant experiments carried out on a
number of JAVA programs are presented. The experimental results demonstrate the efficiency and efficacy
of the framework and show that it can outperform the performance of related approaches.
1 INTRODUCTION
Many researchers have used control flow graphs to
examine features of software and combine program
analysis with other techniques such as the testing,
slicing and optimisation. Recent research focuses on
test data generators, systems that can generate test
cases in relation to a testing coverage criterion. Most
of the test data generators are either random (P.
Godefroid, Klarlund, & Sen, 2005), if they generate
test cases randomly, or dynamic, if they adapt their
behaviour based on the generated data (Bertolino,
2007). Several authors use optimisation algorithms
to guide the search process as the problem of
generating test data is formulated as an optimisation
problem (Pargas, Harrold, & Peck, 1999).
The problem, however, is that in some cases
even optimisation algorithms may not be able to
generate an adequate set of test cases with respect to
the selected coverage criterion. This may be the
result of the program complexity; for example
executing a path may be more complicated if the
path contains quite a few multiple conditions and
hence the optimisation algorithm cannot achieve the
desired value in each condition.
This paper addresses the complexity challenge of
programs and aims to develop an efficient algorithm
that can simplify this complexity and work together
with a test data generator to produce the target set of
test cases. We present the design and
implementation details of a framework that utilises
symbolic execution with evolutionary algorithms to
generate test cases for JAVA programs. The
symbolic execution, which is embedded in the
program analyser of the framework, transforms the
original program to a set of simple paths, the
individual testing of which is equivalent to the
testing of the original program. The paper also
presents a set of experiments that demonstrate the
successful performance of the framework in terms of
coverage adequacy. The framework is compared
with a similar method found in the relevant literature
and the results show that the framework can achieve
better coverage with respect to the criterion selected.
The rest of the paper is organized as follows:
Section 2 presents some related work on this subject,
while section 3 describes the proposed testing
framework. Section 4 evaluates the efficacy of our
testing approach and provides experimental results
on a number of sample programs, as well as some
commonly known programs that are used as
benchmarks for comparison purposes. Finally,
Section 5 concludes the paper and suggests future
research steps.
144
Sofokleous A., Andreou A. and Kourras A. (2009).
SYMBOLIC EXECUTION FOR DYNAMIC, EVOLUTIONARY TEST DATA GENERATION.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Databases and Information Systems Integration, pages
144-150
DOI: 10.5220/0001992701440150
Copyright
c
SciTePress

2 RELATED WORK
This paper proposes a hybrid software test data
generation algorithm that utilizes symbolic
execution to optimize (lower) the complexity of the
programs under testing, and computational
intelligent algorithms to generate test cases. Most
test data generation approaches use the source code
to analyze the program and guide the test process
(Bertolino, 2007; McMinn, 2004; A. Sofokleous &
Andreou, 2008).
Test data search can be utilized either on the
complete program or according to a single path (A.
Sofokleous & Andreou, 2007; Zhang, Xu, & Wang,
2004). Generated data are usually evaluated
according to testing criteria varying on the
implementation complexity and the testing quality
offered (Frankl & Weyuker, 1988); examples of the
branch coverage criterion and the branch/condition
coverage criterion are shown in (Soffa, Mathur, &
Gupta, 2000), (A. A. Sofokleous & Andreou, 2008),
respectively. Genetic Algorithms (GA) have been
used with remarkable success in dynamic test data
generation as they can efficiently search the huge
input space and determine test cases for complicate
programs (P. Godefroid, 2007). Part of GA’s success
in this particular problem is the design of the fitness
function; poor design of this function may misguide
the search process and lead to over processing or
even to the fitness landscape. The fitness landscape,
which is one of the recent problems engaging
researchers in this area, is a state of the GA where its
fitness function gives the same value for almost all
solutions; as a result, the search process cannot be
guided to the right direction. Suppose the fitness
function is designed to capture the distance from a
search target, the fitness landscape may be caused in
cases where more than one path can lead to a search
target (i.e. path problem) or when one or more
conditions take values from a small set of values (i.e.
flag problem) (Baresel & Sthamer, 2003). To
address the path problem, researchers in (McMinn,
Harman, Binkley & Tonella, 2006) suggest
generating test data for each path leading to its
target, whereas to deal with the flag problem
(Bottaci, 2002) a common way is to transform the
program to multiple sub-programs that could
maintain the same properties as the original version
(Baresel, Binkley, Harman & Korel, 2004); in this
case, generating test cases for each individual sub-
program is the same as generating test cases for the
original program. This paper uses both path
isolation and symbolic program transformation to
address efficiently both types of origins of the
fitness landscape respectively. The advantage of our
approach is that it addresses both the path and the
flag problems using a novel, flexible method that
combines symbolic execution with genetic
algorithms.
Symbolic testing was first reported by King et al.
back in 1976 (King, 1976). The need for symbolic
execution comes as a consequence of the increase of
software complexity. Symbolic testing is an abstract
definition which has two implementation methods.
The first is Symbolic Execution and the second is
Symbolic Evaluation. An example of the former,
along with extended finite state machines, is used in
(Zhang et al., 2004) to capture the program’s
behaviour, extract feasible paths and generate test
data for the program under testing. With the use of a
control flow graph and symbolic execution, our
approach extracts the paths of the program under
testing and transforms each path to a set of
equations. Each set of equations describes a set of
conditions, the satisfaction of which implies the
execution of the path. The combination of symbolic
execution and control flow analysis has been also
reported in (Kebbal, 2006), with some limitations,
however, in the analysis of the graph which
represents many statements in each block. The main
problem with approaches following only symbolic
testing is located in the loops; according to
(Tillmann & Schulte, 2006), symbolic testing fails to
reveal the needed test cases for executing a loop for
a particular number of times. In our case, the
equations describe the conditions that when satisfied
can force such an execution for a specific loop, i.e.
how to iterate k times the particular loop.
3 SYMBOLIC
TRANSFORMATION AND
EVOLUTIONARY TEST DATA
GENERATION
This paper extends the Dynamic Test Data
Generation Framework (DTDGF) described in (A.
A. Sofokleous & Andreou, 2008). The DTDGF
consists of two main systems, the Analysis and
Testing systems. The former analyses programs,
creates program representations such as control and
data flow graphs, and simulates and reports the
execution of a test case on the control flow graph.
The Analysis System (AS) may be used by other
systems performing testing, debugging, optimization
and slicing. Currently, AS is integrated with a test
data generator, a system that utilizes genetic
SYMBOLIC EXECUTION FOR DYNAMIC, EVOLUTIONARY TEST DATA GENERATION
145
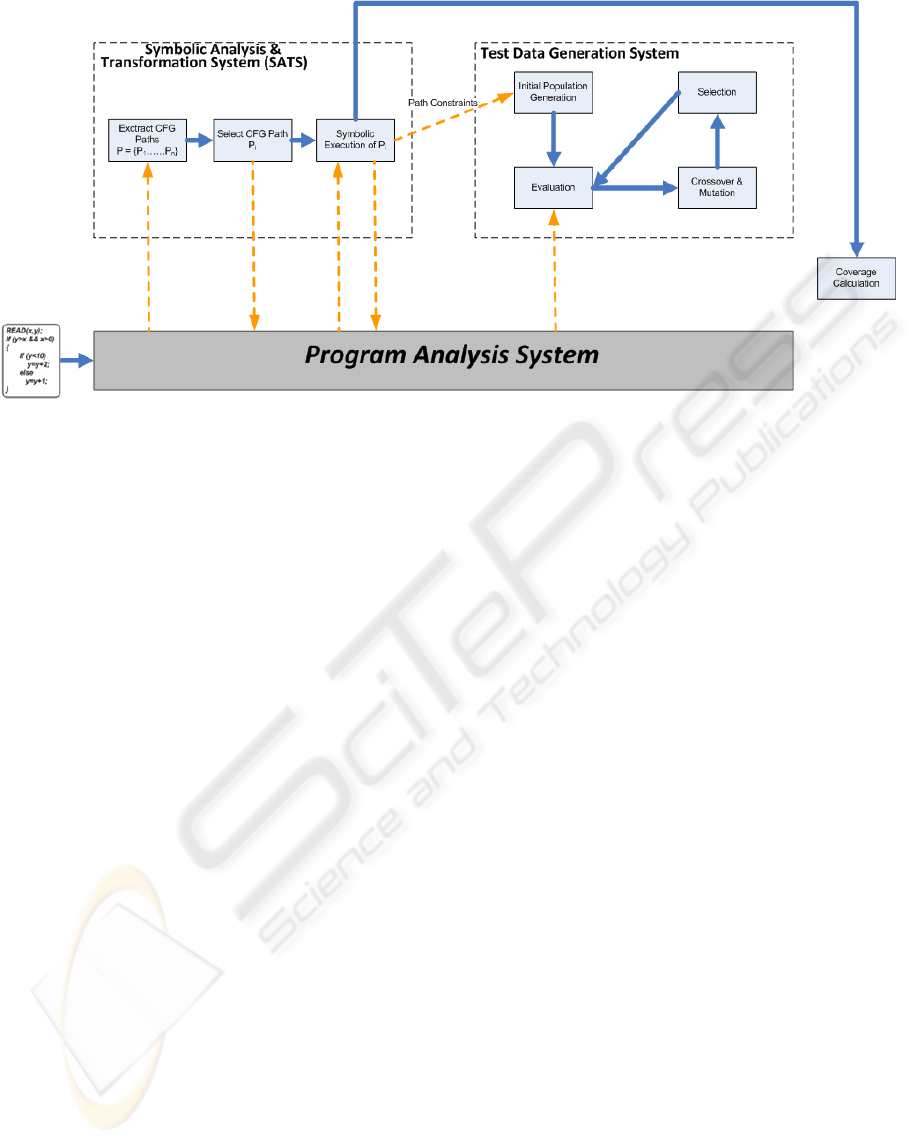
Figure 1: The Symbolic Analysis & Transformation System between the Program Analysis System and the Test Data
Generation System.
algorithms to produce test cases in relation to control
or data flow criteria.
The system presented in this paper uses the
control flow graphs produced by AS to transform
paths to sets of symbolic equations. A new module,
called Symbolic Analysis & Transformation System
(SATS), works between the AS and a revised
version of the Test Data Generation System (Figure
1).
Symbolic Analysis & Transformation System
(SATS) aims to reduce the complexity of finding
test cases to a simple problem of solving a set of
equations. Specifically, SATS transforms each path
to a set of equations with respect to the input
variables; to cover a path, the set of equations must
be solved by assigning values to the input variables.
This set essentially describes the conditions that lead
to the execution of a particular path. SATS works as
follows:
Path Localization. Initially SATS utilizes
DTDGF’s control flow graph, on which a depth first
search algorithm extracts all possible paths of the
program under testing. Suppose that the control flow
graph of a program under testing is G, then the set of
extracted paths is expressed as
{
}
12
, , ....,
n
P
pp p=
, where n is the total
number of paths and path
i
p
, where 1 ≤ i ≤ n, is
also a sub-graph of the original graph G; note that a
path must consist of at least one edge and two
vertices. SATS saves each path as a sequence of
numbers, e.g.
{
}
3, 4, 5, 6
i
p =
, where each number
represents a particular node from the nodes of the
original control flow graph G. Then the user can
decide on which paths the generator should run; the
user can choose for testing either all paths or a
specific path. The next two steps, Path Selection and
Symbolization, are executed consecutively, once for
each selected path.
Path Selection. SATS creates a new control flow
graph for path
i
p
. The new control flow graph is a
sub-graph of the original graph. Both graphs are
stored by the system, while the graph in use is the
one representing the selected path; this graph will be
analysed in the next step .
Path Symbolization. Symbolic Execution of path
step
i
p
involves transforming all local variables to
their symbolic counterpart. A symbolic value is
essentially the equivalence of a variable expressed as
a function of only the input parameters of the
program. This transformation is executed with an
up-down algorithm that starts from the first node of
the selected control flow graph and symbolically
replaces each node’s expressions using equivalent
expressions that include the input variables. The
objective is to reduce the nodes to a set of nodes that
include only constraints expressed in relation to the
input variables. When all the transformations have
been made, the algorithm focuses on remaining
nodes, which are path constraints. These constraints
are converted to their TRUE equivalents; an example
is shown in Table 1, where A and B are conditions,
ICEIS 2009 - International Conference on Enterprise Information Systems
146
e.g. A
X>10 and B
Y20‐X, where
variables X
and Y are the input parameters.
Table 1: Predicate transformation.
Original Path Constraint
Path Constraint
Converted to its TRUE Equivalent
A && B
!(A&&B)
!A || !B
A
|| B
!(A||B)
!A && !B
Test Data Generation. The test data generator
utilises a genetic algorithm for each selected path.
Note, that if during the execution of a path p
i
, a test
case is found for another path from the selected list
of paths, say p
z
, then the test data generator removes
path p
z
from the list and continues with the rest of
the unexecuted paths.
The encoding of a chromosome in the GA
represents a solution as a series of k genes, with k
being the number of input parameters embedded in
the set of path constraints. The objective is to
determine the values of the parameters that can solve
the equations. For a given path
Pp
z
∈
, the fitness
function is expressed as
∑
=
+
=
PC
i
i
z
pcpfPC
pCf
1
)(
1
),(
(1)
where C is the chromosome to be evaluated and PC
is the set of equations of path
z
p
, i.e. the path
constraints as provided by the symbolic execution;
pc
i
represents the i
th
constraint (or equation)
and
PCpc
i
∈
. The expression
)(
i
pcpf
evaluates
each constraint according to the value (i.e. test case)
of the chromosome as follows:
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
=+
=
=
)(),(
)(||)()),()(
)&(&)()),(),(min(
)(
ApcIFFAds
BApcIFFBpfApf
BApcIFFApfApf
pcpf
i
i
i
i
(2)
If path constraint pc
i
consists of two predicates
connected with the logical operand “AND” (&&)
then the value of pf(pc
i
) is the minimum between
pf(A) and pf(B), as pc
i
can be evaluated to TRUE if
and only if each part is evaluated to true. If path
constraint pc
i
consists of two predicates connected
with the logical operand “OR” (||) then the value of
pf(pc
i
) is the summation of pf(A) and pf(B), as pc
i
can be evaluated to TRUE if and only if at least one
of the parts is evaluated to TRUE. If path constraint
pc
i
consists of only one predicate, i.e. pc
i
= A, then
pf(pc
i
) is the value of distance ds(A). For ds(A), if
the evaluation of A is FALSE, then we transform
constraint A to the form of C≥0, or C>0, or C≠0, or
C=0, e.g., if A=x>y then A≡x-y>0. Therefore, ds(A)
may be expressed as:
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
≠≡>≡+
=≡≥≡=
00,)(
00),(
,0
)(
CAorCAIFFeCabs
CAorCAIFFCabs
TRUEisAIFF
Ads
(3)
SATS starts with the Initial Population
Generation, where it generates chromosomes
according to the structure of the selected path. Then
a repetitive cycle of Evaluation, Reproduction
(Crossover & Mutation) and Selection follows.
Repetition of computation cycles is terminated either
when the maximum number of generations has been
reached or a test case that executes completely the
path has been found. If the GA fails to find a
suitable test case then the path is marked as
infeasible (possible dead path). SATS continues to
the next path, if there is one, otherwise it terminates
the testing process and calculates the coverage.
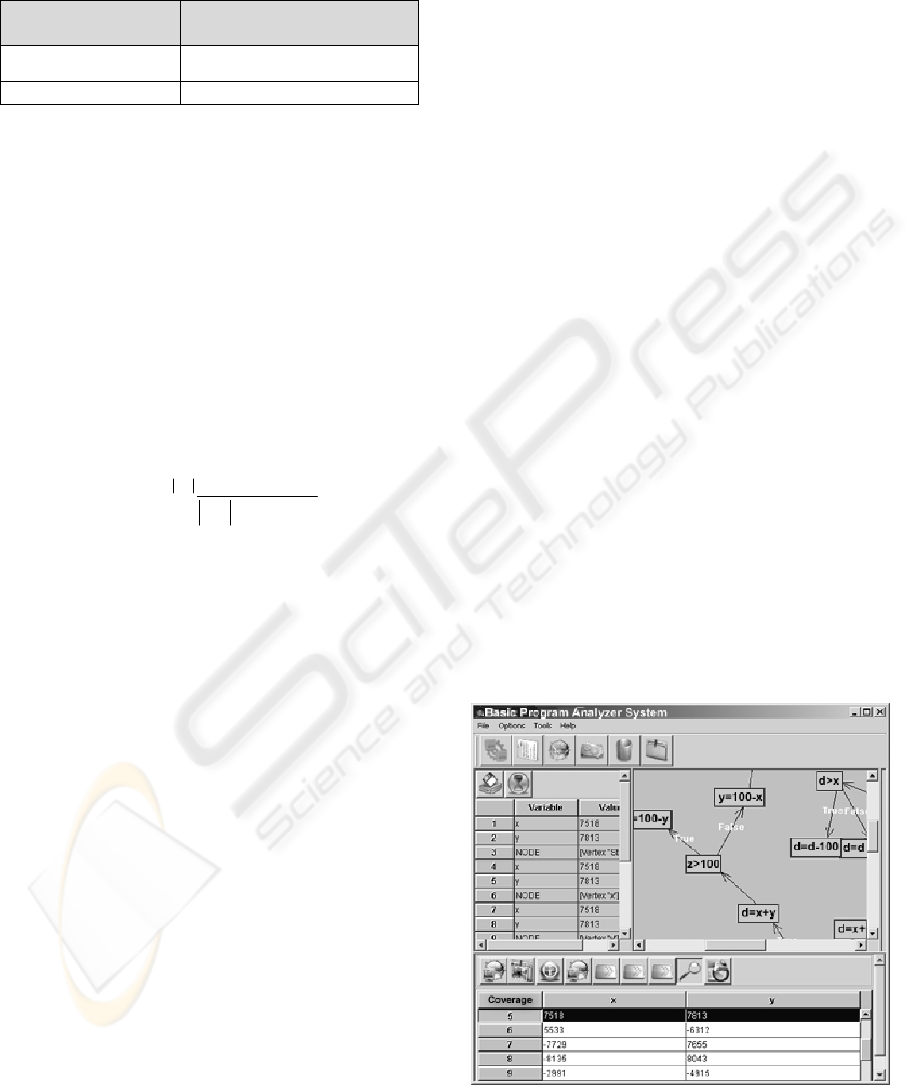
Figure 2 presents the prototype software
application, which was developed to support the
whole process. At the right part of this figure the
main screen of the application that creates the
control flow graph of the program under testing is
depicted; the lower part of Figure 2 presents the test
cases that were generated. Users can interact with
the application and select one or more test cases to
inspect both graphically (i.e. on the control flow
graph) and numerically (in percentage terms) the
coverage achieved.
Figure 2: The prototype software application.
SYMBOLIC EXECUTION FOR DYNAMIC, EVOLUTIONARY TEST DATA GENERATION
147
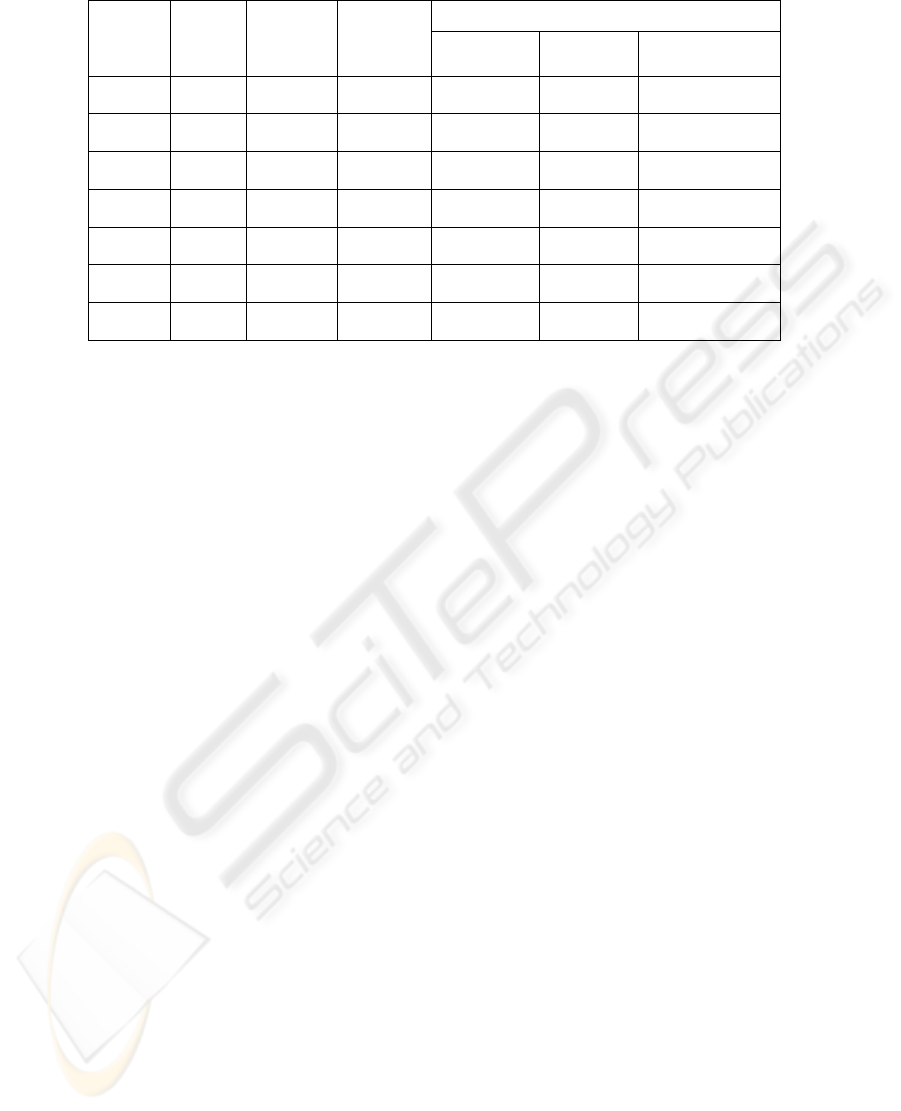
Table 2: Experiments on a pool of randomly generated programs with varying LOC and complexity.
AA LOC
# If
statements
Complexity
Our Algorithm
edge
coverage
condition
coverage
edge/condition
coverage
1 5
1 multiple
2 single
Low 100% 100% 100%
2 12
1 multiple
2 single
Low 100% 100% 100%
3 14
2 multiple
4 single
Medium 100% 100% 100%
4 11
2 multiple
6 single
Medium 100% 84.61% 92.3%
5 16
3 multiple
12 single
High 100% 87.5% 93.75%
6 16
3 multiple
12 single
High 100% 87.5% 93.75%
7 16
3 multiple
15 single
Very High 100% 73.33% 86.66%
4 EXPERIMENTAL RESULTS
This section presents a list of experiments carried
out with the proposed testing framework on a pool
of standards and randomly generated JAVA
programs. The JAVA programs used in experiments
presented in this work can be retrieved from
http://www.cs.ucy.ac.cy/~asofok/testing/9.html.
A series of initial trial experiments led us to the
following settings: The GA’s population size was set
to 200 chromosomes, the probabilities of crossover,
mutation and switch-mutation’s step equal to 0.45,
0.10 and 0.50, respectively, and the maximum
number of generations to 1000. The Roulette Wheel
was defined as the selection operator and also the
feature of elitism was activated, that is, the
algorithm always passes the best chromosome
unchangeable to the next generation. The testing
framework run on a CENTRINO duo 1.83 GHz with
1.50 GB Ram and JDK 1.5 operating with the
Windows XP OS.
As previously mentioned, through the proposed
framework the user is able to select one or more
paths to produce test data for. The framework runs
consecutively a genetic algorithm for each selected
path; if a test case that executes the path is found
then the framework stores this test case and
continues to the next path, if there is one. Testing
adequacy was assessed using the edge, condition and
combined edge/condition coverage criteria. Edge
coverage is calculated as the number of edges
executed over the total edges of the control flow
graph of the program under testing. To find the
executed edges, the framework iterates each test
case found to execute a path and adds its executed
edges. Likewise, condition coverage is calculated as
the average number of conditions evaluated to TRUE
and conditions executed to FALSE over the total
number of conditions of the control flow graph of
the program under testing. Note that a condition
must be executed in order to evaluate to one of the
two values (i.e. short circuiting, a state where the
first condition of a multiple condition can determine
the whole result and therefore the remaining
conditions are not evaluated by the virtual machine).
Finally, the edge/condition coverage is calculated as
the average value of the edge coverage and the
condition coverage.
Table 2 shows the first set of experiments that
involves seven randomly generated programs
varying in terms of complexity expressed in relation
to LOC (lines of code), number of conditions, and
type and usage (complexity) of conditions (e.g.
simple and multiple). The results show that the
framework can achieve full edge coverage for every
program listed in the table, while the lower condition
coverage is 73.33% for the 7
th
program which is the
largest in terms of LOC and the most complicated;
complexity is expressed as a function of LOC and
conditions.
The second set of experiments compares the
performance of the framework against a symbolic
testing approach called JCUTE (Sen, Marinov, &
Agha, 2005). This set of experiments selected the
first three randomly generated programs of Table 2
and applied both approaches. The results of Table 3
show that both frameworks have equivalent
performance for the first two programs; as
complexity rises, though, our framework clearly
outperforms the JCUTE approach as seen in the case
ICEIS 2009 - International Conference on Enterprise Information Systems
148
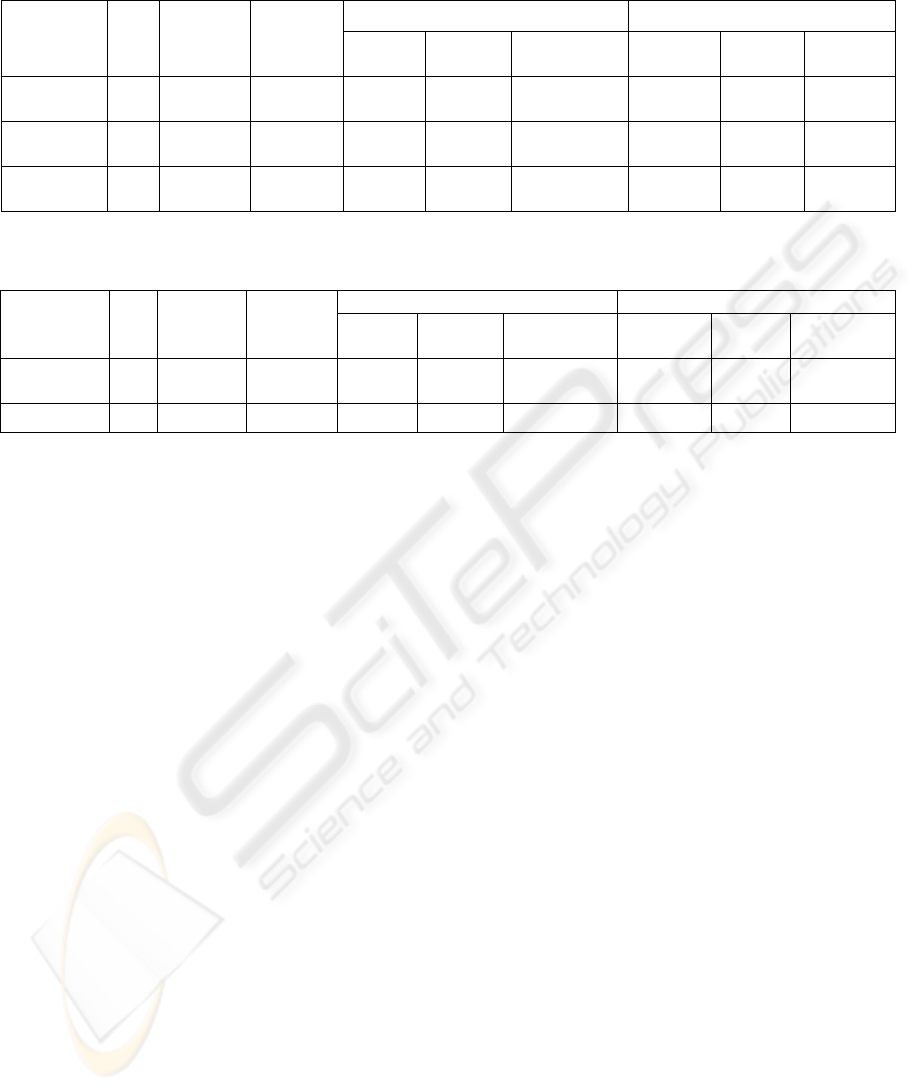
Table 3: Comparison of our algorithm against JCUTE (Sen et al., 2005). Experiments on three randomly generated
programs with varying complexity.
AA LOC
# If
statements
Complexity
JCUTE[REF] Our Algorithm
edge
coverage
condition
coverage
edge/condition
coverage
edge
coverage
condition
coverage
edge/conditi
on coverage
1 5
1 multiple
2 single
Low 100% 100% 100% 100% 100% 100%
2 12
1 multiple
2 single
Low 100% 100% 100% 100% 100% 100%
3 14
2 multiple
4 single
Medium
81.25%
75% 78.125% 100% 100% 100%
Table 4: Comparison of our algorithm against JCUTE (Sen et al., 2005). Experiments on the TriangleClassification and the
FindMaximum standard programs (benchmarks).
Benchmark LOC
#If
statements
Complexity
JCUTE
(Sen et al., 2005) Our Algorithm
edge
coverage
condition
coverage
edge/condition
coverage
edge
coverage
condition
coverage
edge/condition
coverage
Triangle
Classification
29 9 High
15.78% 14.7% 15.24%
95.73% 88.23% 91.48%
FindMaximum 12 2 Low
85.71% 75% 80.35%
100% 100% 100%
of the third program. In this case, our framework
again, achieves full coverage in terms of the edge,
condition and combined edge/condition criteria,
whereas the other approach fails to reach this level
of coverage in any of the aforementioned criteria.
Table 4 shows the third set of experiments,
which compares the two approaches over two well
known standard programs, the
TriangleClassification and the FindMaximum
programs. The results show the efficiency of our
framework which manages to outperform
dramatically the performance of the other approach.
For example, in the case of the
TriangleClassification, our framework achieves
91.48% edge/condition coverage, whereas the
edge/condition coverage of the other approach is
only 15.25%. In the case of the FindMaximum
program, our framework manages to achieve full
coverage in each of the three coverage criteria.
5 CONCLUSIONS
This paper presented a framework that combines the
advantages of symbolic execution and evolutionary
algorithms for solving the complicated problem of
generating automatically an adequate set of test
cases for a given program written in JAVA. The
framework comprises a program analyser, a
symbolic executer and a test data generator. The
program analyser uses the source code of the
program under testing for extracting information,
such as variables name and scope, and creating
program models, such as control flow graphs. The
symbolic executer is responsible for simplifying and
transforming a path to a set of path constraints. The
test data generator solves the path constraints using
genetic algorithms. The user tunes the genetic
algorithm by specifying several preferences, such as
input parameter boundaries, population size, number
of evolutions etc.
Coverage adequacy was assessed using three
known criteria, namely condition, edge and
combined condition/edge coverage. The proposed
testing framework was evaluated using both
standard and randomly generated JAVA programs.
The results obtained using different sets of
experiments demonstrated that the proposed
framework performs efficiently on different types of
programs in terms of size and complexity. Further
results, which compared the performance of our
framework against a similar approach revealed the
superiority and efficiency of the proposed approach.
Future work will carry out more experiments and
will perform more comparisons of our framework.
The experiments will use more standard programs
richer in LOC and number of conditions. Future
work will also consider improving the performance
of the symbolic algorithm so as to be able to
simplify further the path constraints and allow the
test data generator to achieve full coverage even for
programs with higher complexity that those listed in
Table 2. Currently, we are developing an object
oriented model that will be able to capture the
SYMBOLIC EXECUTION FOR DYNAMIC, EVOLUTIONARY TEST DATA GENERATION
149

features of both object-oriented and graphically
depict them on control flow graphs with processing
via UML diagrammatical notations. Our future
research steps will attempt to incorporate this model
into the existing framework and extend the symbolic
executer so as to be able to work with the features of
the new model.
REFERENCES
Baresel, A., Binkley, D., Harman, M., & Korel, B. (2004).
Evolutionary testing in the presence of loop-assigned
flags: A testability transformation approach.
Proceedings of the 2004 ACM SIGSOFT International
Symposium on Software Testing and Analysis, Boston,
Massachusetts, USA. 108-118.
Baresel, A., & Sthamer, H. (2003). Evolutionary testing of
flag conditions. Lecture Notes in Computer Science
2724: Proceedings of the Genetic and Evolutionary
Computation Conference (GECCO 2003), Chicago,
IL, USA. , 2724 2442-2454.
Bertolino, A. (2007). Software testing research:
Achievements, challenges, dreams. Proceedings of the
29th International Conference on Software
Engineering (ICSE 2007): Future of Software
Engineering (FOSE '07), Minneapolis, MN, USA. , 0
85-103.
Bottaci, L. (2002). Instrumenting programs with flag
variables for test data search by genetic algorithms.
Proceedings of the Genetic and Evolutionary
Computation Conference, New York, USA. 1337-
1342.
Frankl, P. G., & Weyuker, E. J. (1988). An applicable
family of data flow testing criteria. IEEE Transactions
on Software Engineering, 14(10), 1483-1498.
Godefroid, P. (2007). Compositional dynamic test
generation. Proceedings of the 34th ACM Symposium
on Principles of Programming Languages (ACM
SIGPLAN-SIGACT), Nice, France. 47-54.
Godefroid, P., Klarlund, N., & Sen, K. (2005). DART:
Directed automated random testing. Proceedings of
the 2005 ACM SIGPLAN Conference on
Programming Language Design and Implementation
(PLDI '05), Chicago, IL, USA. 213-223.
Kebbal, D. (2006). Automatic flow analysis using
symbolic execution and path enumeration.
Proceedings of the 2006 International Conference
Workshops on Parallel Processing, Columbus, Ohio,
USA. 397-404.
King, J. C. (1976). Symbolic execution and program
testing. Communications of the ACM, 19(7), 385-394.
McMinn, P. (2004). Search-based software test data
generation: A survey. Software Testing, Verification
and Reliability, 14(2), 105-156.
McMinn, P., Harman, M., Binkley, D., & Tonella, P.
(2006). The species per path approach to SearchBased
test data generation. Proceedings of the 2006
International Symposium on Software Testing and
Analysis (ISSTA 2006), London, UK. 13-24.
Pargas, R. P., Harrold, M. J., & Peck, R. R. (1999). Test-
data generation using genetic algorithms. Journal of
Software Testing, Verification and Reliability, 9(4),
263-282.
Sen, K., Marinov, D., & Agha, G. (2005). CUTE: A
concolic unit testing engine for C. Proceedings of the
Joint 10th European Software Engineering
Conference and 13th ACM SIGSOFT Symposium on
the Foundations of Software Engineering, Lisbon,
Portugal. 263-272.
Soffa, M. L., Mathur, A. P., & Gupta, N. (2000).
Generating test data for branch coverage. Proceedings
of the 15th IEEE International Conference on
Automated Software Engineering (ASE'00), Grenoble,
France. 219.
Sofokleous, A., & Andreou, A. (2007). Batch-optimistic
test-cases generation using genetic algorithms.
Proceedings of the 19th IEEE International
Conference on Tools with Artificial Intelligence
(ICTAI), Patra, Greece. 157-164.
Sofokleous, A., & Andreou, A. (2008). Dynamic search-
based test data generation focused on data flow paths.
Proceedings of the 10th International Conference on
Enterprise Information Systems (ICEIS 2006),
Barcelona, Spain. 27-35.
Sofokleous, A. A., & Andreou, A. S. (2008). Automatic,
evolutionary test data generation for dynamic software
testing. The Journal of Systems & Software, 81(11),
1883-1898.
Tillmann, N., & Schulte, W. (2006). Unit tests reloaded:
Parameterized unit testing with symbolic execution.
IEEE Software, 23(4), 38-47.
Zhang, J., Xu, C., & Wang, X. (2004). Path-oriented test
data generation using symbolic execution and
constraint solving techniques. Proceedings of the
Second International Conference on Software
Engineering and Formal Methods, Beijing, China. , 28
242-250.
ICEIS 2009 - International Conference on Enterprise Information Systems
150
