
PERFORMING THE RETRIEVE STEP IN A CASE-BASED
REASONING SYSTEM FOR DECISION MAKING IN INTRUSION
SCENARIOS
Jesus Conesa and Angela Ribeiro
Instituto de Automatica Industrial, CSIC, Arganda del Rey, Madrid, Spain
Keywords:
Case-based reasoning, Similarity function, decision tree, Cross-validation.
Abstract:
The present paper describes implementation of a case-based reasoning system involved in a crisis management
project for infrastructural building security. The goal is to achieve an expert system, capable of making deci-
sions in real-time to quickly neutralize one or more intruders that threaten strategic installations. This article
presents development of usual CBR stages, such as case representation, retrieval phase and validation process,
mainly focusing on the retrieving phase, approaching it through two strategies: similarity functions and deci-
sion tree structures. The designing case, such as the discretization values that are adopted, will also discussed.
Finally, results on the retrieving phase performance are shown and analyzed according to well-known cross-
validations, such as k-validations or leave-one-out. This work is supported by project CENIT-HESPERIA.
1 INTRODUCTION
Due to the sensitive international situation caused by
the still recent terrorist attacks, there is a common
need to protect the safety of great spaces like gov-
ernment buildings. To support these kind of prob-
lems a CBR system has been designed which repre-
sents the decision making core of the security sys-
tem under development, hence it will make decisions
concerning several scenarios in real-time. The intru-
sion evaluation process and recovery of a solution that
minimizes the consequences of the attack are both in-
cluded within management of infrastructure safety. It
is in this context that the proposed CBR will perform.
Reaction time is an important parameter for these sit-
uations and, therefore, it would be very interesting to
determine a solving action that can help the expert
take the best decision process so speed intervention
can be increased. This is the main reason for includ-
ing a decision support system, in this case a CBR.
In that concerning to the chosen CBR approach, the
same allows identifying and analysing similar previ-
ous intrusion scenes (cases) and applying the associ-
ated solution to similar new cases or, even, construct
a new solution from the previous one that is already
stored. Finding the case that is most similar (from
amongst all those contained in the cases database) to
a new and unknown intrusion scene (case) is not an
easy task, which is included in the CBR cycle (Lopez
de Mantaras, 2006). For the retrieval phase, two ap-
proaches are developed in the present work: the first
applies a similarity function and the second constructs
a decision tree that groups information according to
common characteristics, preparing it for a classifica-
tion process. A knowledge base containing a set of
cases with their associated solutions or actions for
each one of them is referenced alongside this article.
In the case of a new situation, the solution or action
of the most similar case that is stored is copied in the
reuse CBR phase, so it is in the retrieval phase where
the adaptation process is focused.
2 CBR IMPLEMENTATION
2.1 Case Representation
The first implementation step is to define the case
structure. Case representation can be viewed as the
task of enabling the computer to recognize, store, and
process past contextualized experiences (Shiu, 2004).
These are those scene parameters that are, in general,
inspected by an expert to decide from amongst the
several actions that are possible. This subject repre-
sents a very important point because the chosen struc-
ture for a case will strongly determine the entire sys-
tem design.
343
Conesa J. and Ribeiro A. (2009).
PERFORMING THE RETRIEVE STEP IN A CASE-BASED REASONING SYSTEM FOR DECISION MAKING IN INTRUSION SCENARIOS.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
343-346
DOI: 10.5220/0001996403430346
Copyright
c
SciTePress
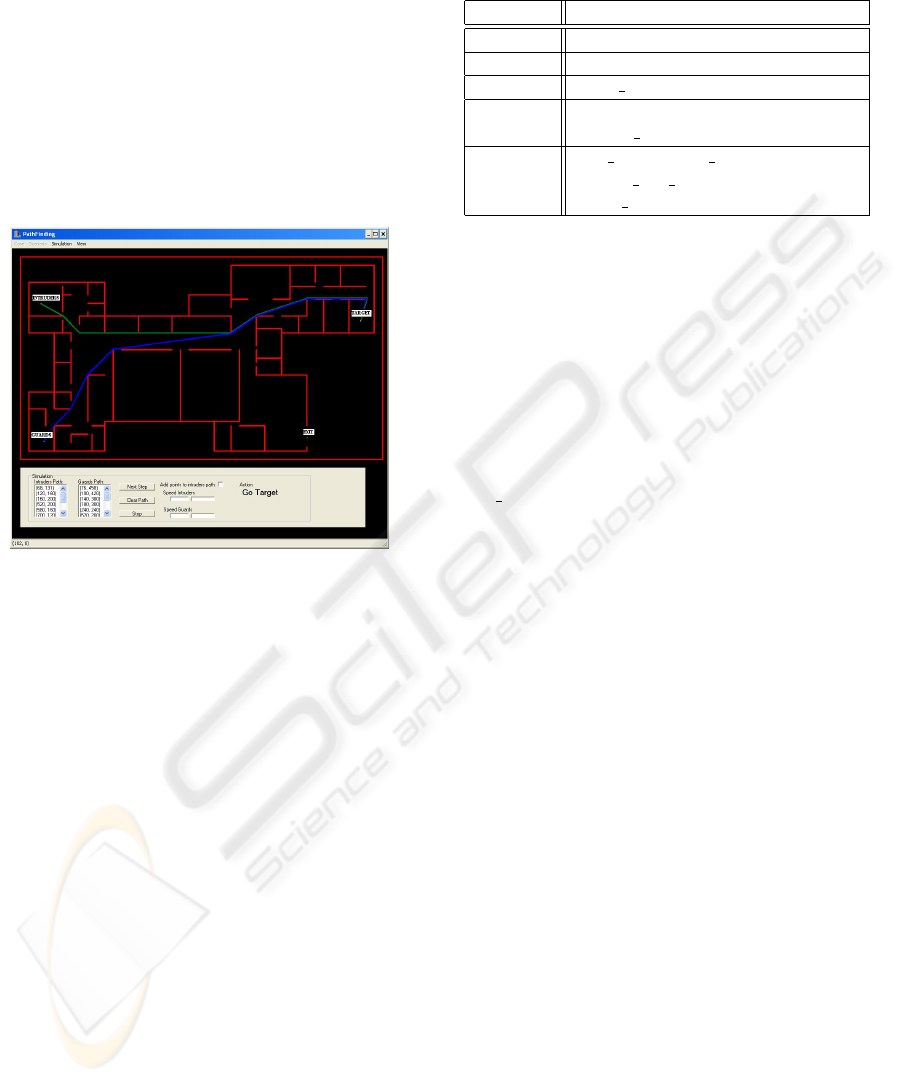
The initial requirements are the map of the build-
ing under surveillance, intruder locations, guards, exit
and sensitive zone (in all probability the intruder tar-
get). Spatial representation of a possible scenario ap-
pears in figure 1. The red lines represent the bounds
of constraint, such as obstacles, walls, closed doors.
Since it is a map with obstacles, the well-known prob-
lem of finding an optimal path is certainly not triv-
ial one. Our approach to resolve the path planning is
based on a representation of the space known as De-
launay triangulation. For more details, see (Anglada,
1997).
Figure 1: Shortest paths between intruders and target and
between guards and target.
The figure 1 have been taken from the simulator
implemented to test the developed CBR system. The
optimal (shortest) paths between intruders and target
and between guards and target are drawn in red and
blue respectively. Information about the alarm sys-
tem is also available. This device can be in three
different states: On (ringing), Off and Not Available.
The direction of the intruders is supposedly detected
at each time by a wireless sensor network integrated
in the scenario and the intruder behaviour could be
predicted, that is, if intruders are going to a certain
target or if they are going to the exit. The number
of intruders and guards are also considered. Like-
wise distances corresponding to the different places
are also available. Based on this information, a natu-
ral abstraction for an intrusion scene could as follows:
< ratio, state, door, alarm, dIT,
dIE, dGI, dGT, dGE,opSol >
where ratio is guard number/intruder number; state is
intruder direction/purpose; alarm is alarm state; dIT
is distance (intruders,target); dIE is distance (intrud-
ers,exit); dGI is distance (guards,intruders); dGT is
distance(guards,target); dGE is distance (guards,exit);
opSol is Solution or action to apply.
Table 1: Values for variables in the characteristic vector of
a scene.
Property Value
ratio LESS k EQUAL k MORE
state TARGET k EXIT
alarm NOT AVAILABLE k OFF k ON
distances CLOSE k MEDIUM k FAR
k NOT REACHABLE
opSol GO EXIT k GO TARGET k
TURN ON ALARM k CAPTURE
k GO INTRUDERS
2.2 Value Discretization
Property values corresponding to the components /
variables of the characteristic vector that has been pre-
viously defined are listed in table 1.
Distances are calculated over the triangulation: a
spatial representation of the map (Anglada, 1997). Its
discrete value is set according to the size of the own
map. Given two places on the space, if there is no
path that connects them, then the value assigned is
NOT REACHABLE. If a path exists and if it is shorter
than 1/3 of the diagonal map, then the CLOSE value
is assigned. For more than 1/3 and less than 2/3 the
value is MEDIUM, while in other cases, FAR is set.
Taking into account that outlined so far, the scene
in figure 1 would be represented by the following
characteristic vector:
< EQUAL, TARGET, ON, MEDIUM,CLOSE,
MEDIUM, MEDIU M, MEDIUM,U NDEFINED >
Please note that solution-property (opSol) is set to
UNDEFINED because this is the default value until
the case can be evaluated by the expert or by the CBR
system in the retrieval phase.
2.3 Similarity Function
Establishing an appropriate similarity function is an
attempt at handling the deeper or hidden relation-
ships between the relevant objects associated with
the cases. There are two major retrieval approaches
(Liao, 1998). The first is based on the computation of
distance between cases, where the most similar case is
determined by evaluation of a similarity measure. The
second approach is related to indexing structures and
our approach is described in the following section. At
any rate, the global similarity function should check
all the variable values and combine them through lo-
cal similarity results to obtain a global similarity mea-
surement. In other words, given cases A and B, the
ICEIS 2009 - International Conference on Enterprise Information Systems
344
function could be expressed as:
SIM(A, B) =
1
p
n
∑
i=1
1 − |ord(a
i
) − ord(b
i
)|
card(O)
(1)
In which p is the number of compared attributes
In which card(O) is the cardinality of the set of pos-
sible category values for a and b and card(O) is the
cardinality of the set of possible category values. In
this first approach, the weight coefficient is the same
for all the properties (1/p). It is important to highlight
that the similarity function coefficients or weight are
not adjusted to the knowledge base, thus the global
function does not measure properly, that is, accord-
ing to its true weight and each local characteristic.
Each property bears the same importance to discern
the cases. To resolve this matter, another strategy is
applied to the similarity, such as inductive reasoning
with decision trees discussed in the next section.
2.4 Decision Tree
A decision tree is used to classify the cases in order to
their common features. Each node of the tree stores
one of the properties of the characteristic vector and
each arc covers one of the possible alternative val-
ues for the property(Buckinx04). One of the most
well-known algorithms is ID3, and that is the pro-
posed approach. For the selection of the best attribute,
the entropy and gain concepts defined in (Mitchell,
1997) will be used. It is interesting to verify that the
solution-attribute is not a concept capable of holding
two values (positive and negative), and even more, its
cardinality is 5 (please see table 1). It should be high-
lighted that if there is no case associated to the final
node, the solution that is returned is the most usual
one on the parent node. Since the final node does
not reference any case, the need for another method
to retrieve a proper solution arises, and since it keeps
common characteristics in that regarding nodes at the
same level, it is natural to select the most common
solution of them.
3 RESULTS
Results for the two retrieval process approaches are
detailed and compared in this section. The mea-
surement that determines performance of the retrieval
phase is the number of properly recovered cases per
the total number of cases that are stored in the cases
database. Different cross validations that modify the
number of partitions from the examples space have
been applied to check these results. In each contrast
operation, one of the example sets is selected to test
the system and those remaining are used as training
sets for the CBR.
Parameter K specifies the number of partitions
over the examples space. It should be highlighted that
in K = N (N is the total number of examples), cross
validation is known as leave-one-out validation. For
K = 10 the validation seems to be especially accurate
(Kohavi, 1995).
In rows ”F” and ”F*” (Function) corresponding to
table 2, the number of well retrieved cases with a sim-
ilarity function (and its percentage) is displayed for a
knowledge case base without and with noise respec-
tively.
In row ”T” and ”T*” (Tree) the cases that are
well recovered by the decision tree are displayed for
knowledge case base without and with noise respec-
tively.
Table 2: Data without noise F and T rows and with noise F*
and T* rows . NC=Number of Cases.
NC 10(%) 30(%) 50(%) 70(%) 100(%)
K = 5
F* 4(40) 14(46) 27(54) 52(74) 74(74)
F 6(60) 15(50) 31(62) 54(77) 80(80)
T* 2(20) 18(60) 31(62) 50(71) 82(82)
T 3(30) 18(60) 33(66) 55(79) 86(86)
K = 10
F* 2(20) 13(43) 25(50) 51(73) 72(72)
F 5(50) 14(47) 29(58) 53(76) 78(78)
T* 1(10) 16(53) 32(64) 55(79) 80(80)
T 3(30) 17(57) 35(70) 60(86) 85(85)
K = Number of cases
F* 2(20) 13(43) 25(50) 50(71) 72(72)
F 5(50) 14(47) 29(58) 52(74) 78(78)
T* 1(10) 13(43) 31(62) 48(69) 83(83)
T 3(30) 13(43) 35(70) 53(76) 88(88)
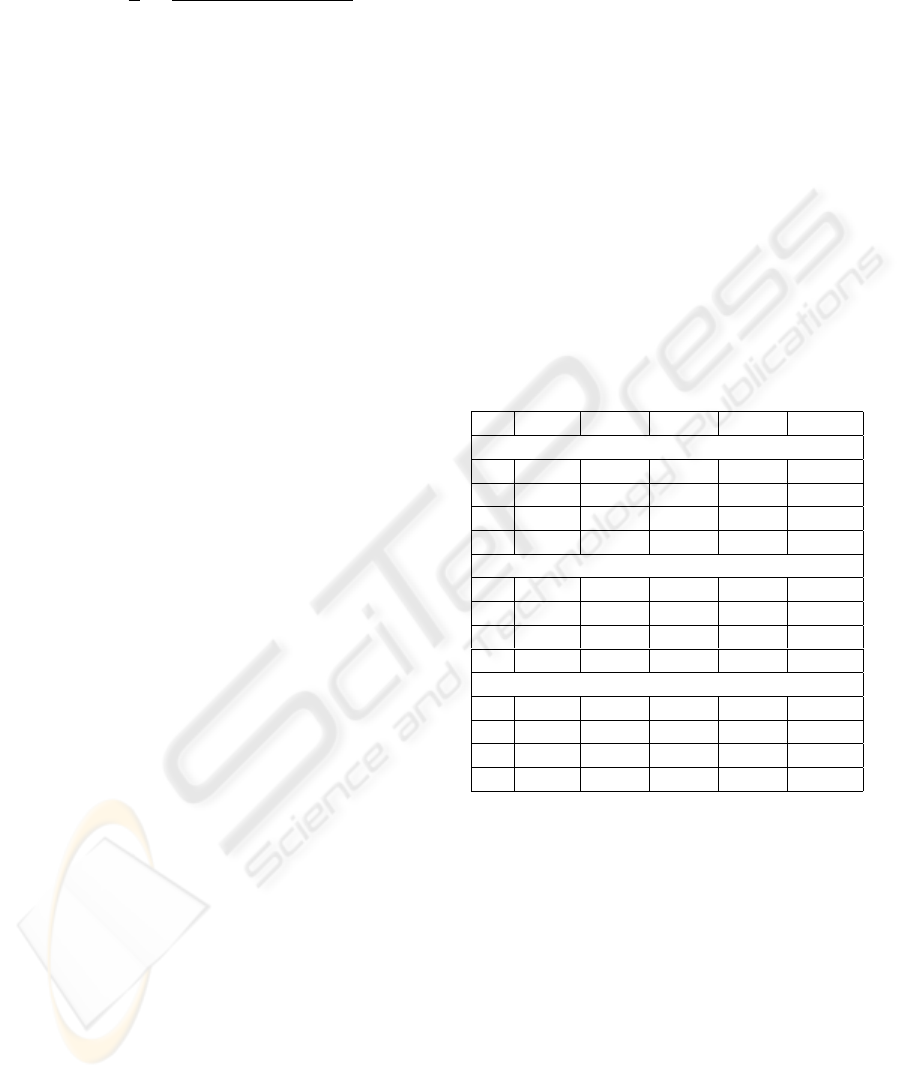
In the figure 2a, it is shown the better decision tree
performance for high numbers of examples. Since
50 cases, there is enough stored knowledge to clas-
sify properly a new case with the decision tree. For
smaller examples sets, the accurate with the similar-
ity function is close to the performance of the decision
tree, even improves it for some cases.
In that pertaining to the results outlined in figure
2b, the first considerations may assume a stable num-
ber of proper recoveries, however, the results high-
light a slight increase according to the number of
cases, exactly the same as in the decision tree. The
reason for this is that all the variables have an impor-
tant role and no particular variable dominates the rest.
Likewise, there is no redundancy among them. Also,
there is more diversity and retrieving cases without
similarity to the queried one is more difficult.
PERFORMING THE RETRIEVE STEP IN A CASE-BASED REASONING SYSTEM FOR DECISION MAKING IN
INTRUSION SCENARIOS
345
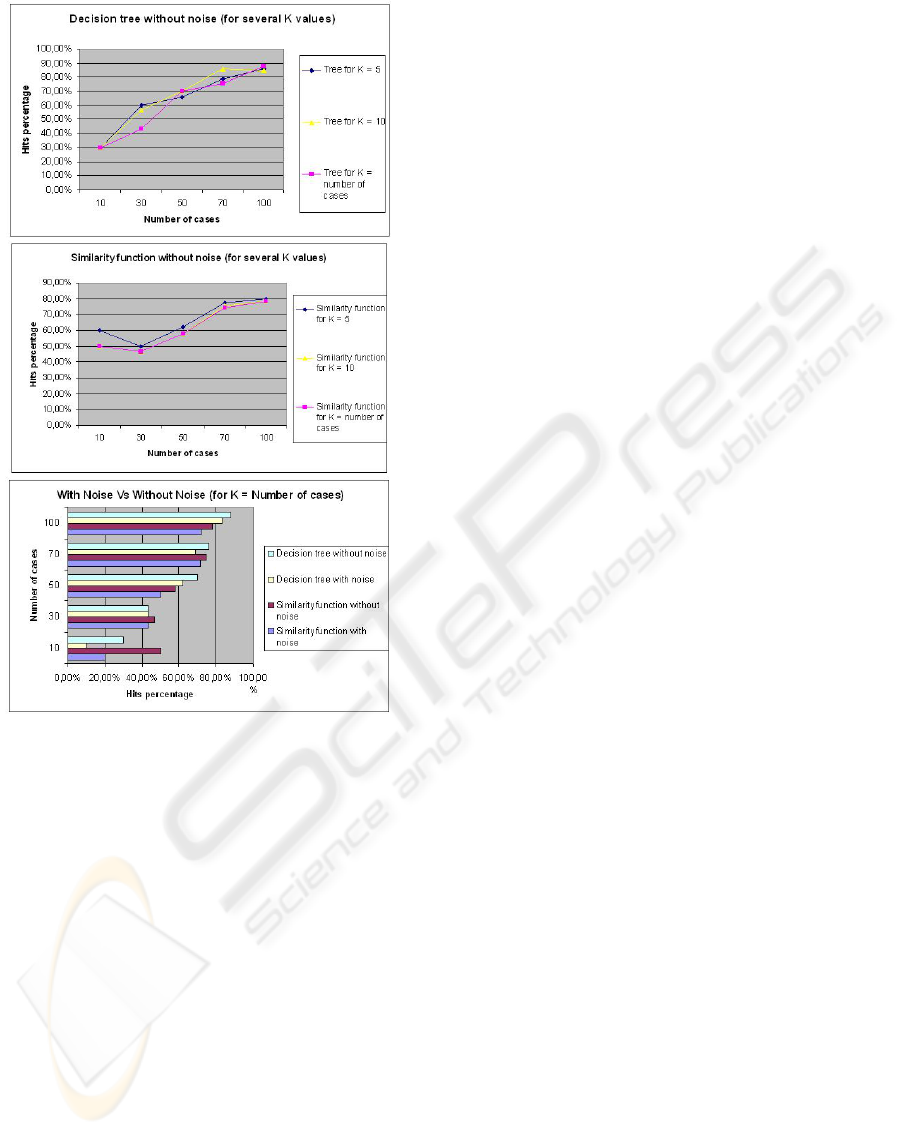
Figure 2: (a) Results without noise for the decision tree (b)
Results without noise for the similarity function (c) Results
without noise and with noise for K = number of cases.
Also, in figure 2c what is highlighted is that noise
negatively affects the system. For said data the sys-
tem was performed with 3 improperly classified cases
for each knowledge base that was used. All the re-
sults that were obtained were worse, in particular for
small-sized knowledge bases (number of cases = 10),
with the reason being that the ratio for incorrectly
classified examples is larger. Even so an appreciable
hit (accurate decreases 3%) can be discerned in big
knowledge bases (numbero f cases = 100).
4 CONCLUSIONS
The intrusion evaluation process and recovery of a
solution that minimizes the attack consequences are
included within management of the safety infrastruc-
ture. A CBR is proposed as the decision making core
of the security system in this context. The performed
system offers the following advantages: a) The sys-
tem is able to learn complex rules with a rather small
number of training examples; b) It can achieve good
performance with a well-selected training set; c) The
decision tree achieves more complex rules than sim-
ilarity functions; d) The gain information measure-
ment reduces the decision tree depth and this allows
improved translation from the decision tree structure
to a rules-based structure. In order words, the learnt
knowledge can be expressed as a set of rules. Finally
the decision tree has nodes without any references to
cases. Hence, it is possible that no similar past expe-
rience to the one queried can be found and, therefore,
any solution that matches. This situation is resolved in
the current approach by returning the most common
solution that is present on the nodes at the same level
(a context that is more similar to the queried case).
However, this is a solution based on statistics, which
could be slightly wrong in some cases. Future ver-
sions should deal with these kinds of nodes.
REFERENCES
Lopez de Mantaras, R., McSherry, D., Bridge, D., Leake,
D., Smyth, B., Craw, S., Faltings, B., Maher, M.,
Cox, M., Forbus, K., Keane, M., Watson, I., 2006. Re-
trieval, Reuse, Revision, and Retention in CBR. The
Knowledge Engineering Review, vol. 20, no. 3, pp.
215-240
Shiu, S., Pal, S. K. , 2004. Foundations of Soft Case-Based
Reasoning. John Wiley & Sons.
Liao, T. W., Zhang, Z., Mount, C. R., 1998. Similarity mea-
sures for retrieval in case-based reasoning systems.
Applied Artificial Intelligence, vol. 12, pp. 267-288.
Mitchell, T., 1997. Machine Learning. McGraw-Hill.
Anglada, M. V., 1997. An Improved Incremental Algorithm
for Constructing Restricted Delaunay Triangulations.
Computer & Graphics, 21(2):215-223.
Buckinx, W., Moons, E., Poel, D. V. D., & Wets, G., 2004.
Customer-adapted coupon targeting using feature se-
lection. Expert Systems with Applications, 26, 509-
518.
Kohavi, R., 1995. A study of cross-validation and bootstrap
for accuracy estimation and model selection. Proceed-
ings of the Fourteenth International Joint Conference
on Artificial Intelligence 2(12): 1137-1143. (Morgan
Kaufmann, San Mateo).
ICEIS 2009 - International Conference on Enterprise Information Systems
346
