
PATTERN RECOGNITION
FOR DOWNHOLE DYNAMOMETER CARD IN OIL ROD PUMP
SYSTEM USING ARTIFICIAL NEURAL NETWORKS
Marco A. D. Bezerra
†
, Leizer Schnitman
†
, M. de A. Barreto Filho
†
† Dept of Electrical Engineering, Universidade Federal da Bahia (UFBA), Salvador, Bahia,. Brazil
J. A. M. Felippe de Souza
††
†† Dept of Electromechanical Engineering, University of Beira Interior (UBI), Covilhã, Portugal
Keywords: Artificial neural network, Pattern recognition, Oil well rod pump, Dynamometer cards.
Abstract: This paper presents the development of an Artificial Neural Network system for Dynamometer Card pattern
recognition in oil well rod pump systems. It covers the establishment of pattern classes and a set of
standards for training and validation, the study of descriptors which allow the design and the
implementation of features extractor, training, analysis and finally the validation and performance test with
a real data base.
1 INTRODUCTION
Oil is one of the main assets in the world economy
and are found in the subsoil and only rarely it has
energy to reach the Earth surface naturally.
Normally it is necessary to raise the oil artificially in
order to get it.
The most popular elevation mechanism used in
the oil industry is the “Rod Pump System”, which is
basically composed by three elements: the “Pumping
Unit”; the “Sucker Rod” and the “Pump” itself. The
main diagnostic measure tool is the “Downhole
Dynamometer Card” which is formed by the values
of position of the pumping unit and the pressure in
the connection junction of the sucker rod and the
pump.
The use of an automatic system for pattern
recognition of downhole dynamometer cards allows
anticipating the problems with its earlier
identification and therefore to take both corrective
and prevention measures for it.
Several works have appeared about mechanisms
of automatic classification of downhole
dynamometer cards (Foley & Svinos, 1987;
Dickinson & Jennings, 1988; Derek, Jennings and
Morgan, 1988; Abello, Houang and Russel, 1993;
Schinitman et al, 2003; P. Xu et al, 2006).
The present work proposes to investigate in the
literature a set of classes of anomalies of downhole
dynamometer cards, to artificially generate one data
training set, to study the feature extractor’s
mechanisms, to implement and train Artificial
Neural Networks (ANN) for recognizing these
patterns. Finally, it also proposes to test the result
with cards obtained from real rod pump system
systems.
2 THE PUMP SYSTEM
Figure 1 shows the main components of the system,
which are: the pumping unit; the sucker rod; the
pump itself.
The pumping unit is normally connected to an
electrical engine or an internal combustion engine
through a gearbox of torque transmission which
transform the spinning movement of the engine into
an alternate movement at the top of the sucker rod.
The sucker rod on its hand transmits the mechanical
energy received at the surface to the pump. Some
energy is lost in friction during this process.
351
A. D. Bezerra M., Schnitman L., de A. Barreto Filho M. and A. M. Felippe de Souza J. (2009).
PATTERN RECOGNITION FOR DOWNHOLE DYNAMOMETER CARD IN OIL ROD PUMP SYSTEM USING ARTIFICIAL NEURAL NETWORKS.
In Proceedings of the 11th International Conference on Enterprise Information Systems - Artificial Intelligence and Decision Support Systems, pages
351-355
DOI: 10.5220/0002000403510355
Copyright
c
SciTePress
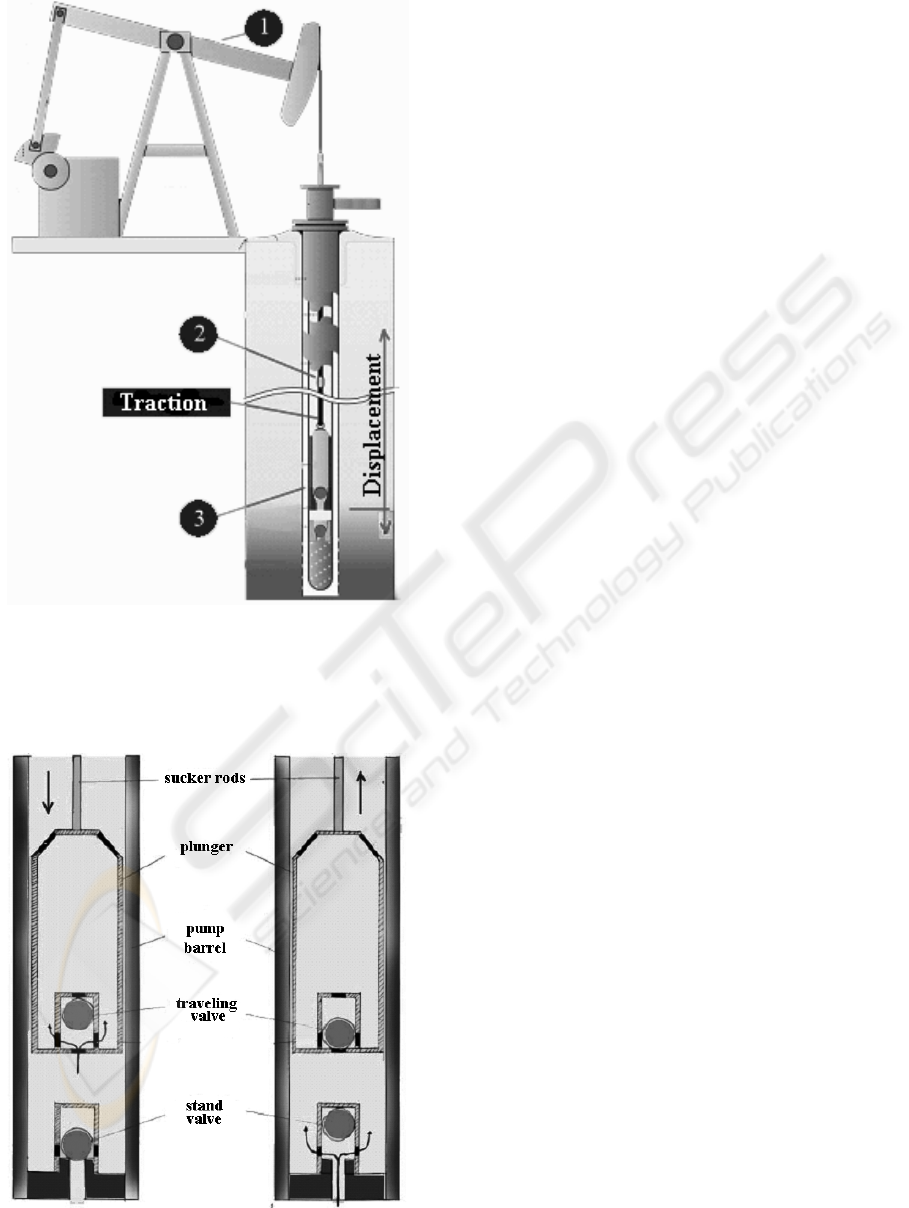
Figure 1: The Pump Mechanical System.
Finally, the pump, which is shown in details at
Figure 2, transmits the mechanical energy received
to the polyphasic fluid (oil, gas, sediments and
water).
Figure 2: The pump.
The main components of the pump are the
plunger, the barrel and the traveling valve and the
standing valve. They together form the pump system
of a positive displacement pump type.
In the downward course the traveling valve
opens and the standing valve shuts. In this way the
weight of the fluid column is supported by the sub-
set of the standing valve and it is transmitted by to
the tubing though the barrel. The plunger’s interior
is flooded by the fluid. Plunging the column of rods
in the fluid causes a small production due to the
volume which was shifted.
In the upward course the traveling valve shuts
and the standing valve opens. The fluid shifted by
the plunger shows up at the surface whereas the
barrel is refilled through the standing valve. In this
way, the weight of the fluid in the tubing is
transmitted to the columns of rods.
The dynamics described here can be seen as a
simple harmonic motion of a mass corresponding to
the columns of rods and the fluid load accumulated
at a single point.
That approach is no longer true if, for example,
the depth increases; or, if the fluid load increases; or,
if either the friction or the rotation rises; or, if the
physical properties of the equipments change. These
cases require a more accurate study on the
operational conditions and this leads to solving
damping wave equations to describe the motion.
The periodic evaluation of the system is done
through:
a) Plunging the pump: determined by the level of the
dynamic level.
b) Downhole dynamometer card: obtained by the
readings of the rod displacement and its
corresponding traction force.
c) Other indicators obtained through production
tests, or verifying the temperature of the rods, or also
pressurization tests of the equipment.
The downhole dynamometer card is the main
tool, and also the richest device, for monitoring the
system. It was created in 1936 when Walton E.
Gilbert published his work (Gilbert, 1936) that
describes the its use for diagnosing the rod pump
system.
To better diagnose the working conditions of the
rod pump system several papers have appeared later,
pointing out to the pioneer work of Gibbs & Neely
(1966) that used mathematical modeling and
computer techniques to determine the conditions on
the sub-surface from measurements conducted on
the surface.
ICEIS 2009 - International Conference on Enterprise Information Systems
352
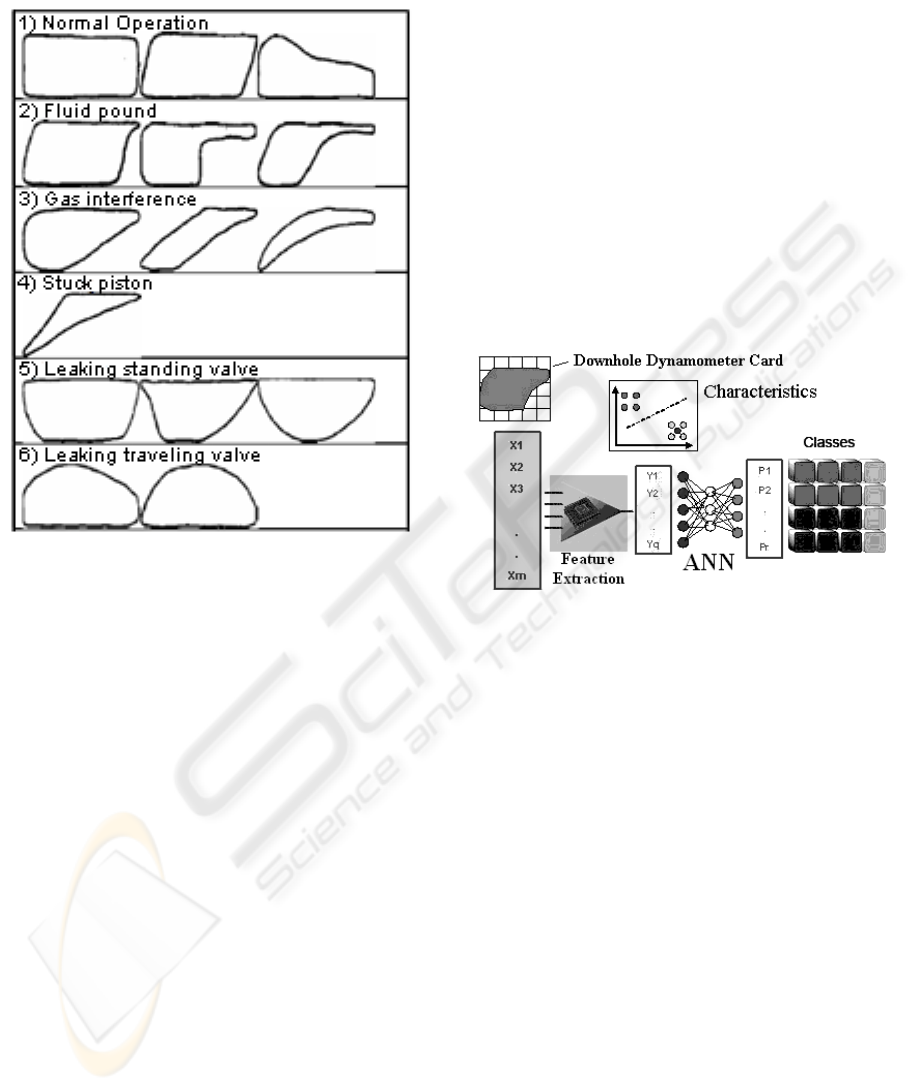
Table 1: Classes for downhole dynamometer cards (a
sample).
Eickmeier (1966) presents the Delta II
dynamometer and its corresponding data analysis.
Electronic sensors arranged as a load cell and a
potentiometer are used together with analogical
recording.
Several schemes have been done in order to get
an automatic diagnostic for the downhole
dynamometer cards using both statistical and
syntactic methods, artificial neural networks (ANN),
and even symbolic neural networks. One can
establish a wide set of classes that are used for
pattern recognition of the downhole dynamometer
card behavior (Table 1).
3 METHODOLOGY
The proposed process for pattern recognition of an
occurrence has two stages: The first stage is the data
acquisition, which is presently accomplished by field
instrumentation and its corresponding processing,
where a computational solution for the model, as
described in section 2, transforms a surface
dynamometer card, which is formed by values of
displacement and tension of the rods acquired by
using sensors that are placed on the surface
equipment, into a downhole dynamometer card,
which is also a set of displacement and tension
values, but, however, conceived for the position
corresponding to the junction between the column of
rods and the plunger.
The second stage the tool for pattern recognition
itself (Figure 3), which has two parts (Haykin,
1998):
1
st
) the feature extraction, which does the a
transformation of the vector X from an observation
space of dimension ‘m’, which is the downhole
dynamometer cards data, into the characteristic
space of dimension ‘q’, where q < m, in order to
simplify the classification task.
2
nd
) the classifier, comprised of a ANN that
associates the vector of characteristics Y of
dimension ‘q’ into one of the classes of the decision
space which has dimension ‘r’.
Figure 3: Characteristic Extractor and Classifier (ANN).
The Characteristic Extractor has two approaches,
the first being to eliminate the redundant information
and the second being the linear or nonlinear
transformation into the observation space dimension.
Here, the proposed scheme is a multiple layers
feed forward ANN with a supervised training device
(Haykin, 1998).
As for the training the proposed structure is to
generate artificially a set of standards using the class
models as shown in Table 1, with a random noise
introduced.
In order to have an approximation closer to
reality, where the values of the cards are attained by
sampling in regular time intervals, a simplification
was conducted, where the sucker rod motion is the
vertical projection of a point in simple harmonic
motion with a constant angular velocity.
4 RESULTS AND DISCUSSION
Initially, an application was done with the aim of
using the proposed methodology to a set of 6,101
PATTERN RECOGNITION FOR DOWNHOLE DYNAMOMETER CARD IN OIL ROD PUMP SYSTEM USING
ARTIFICIAL NEURAL NETWORKS
353
cards from real oil wells and each one composed of
a set of 100 points, which were previously classified
by a human expert.
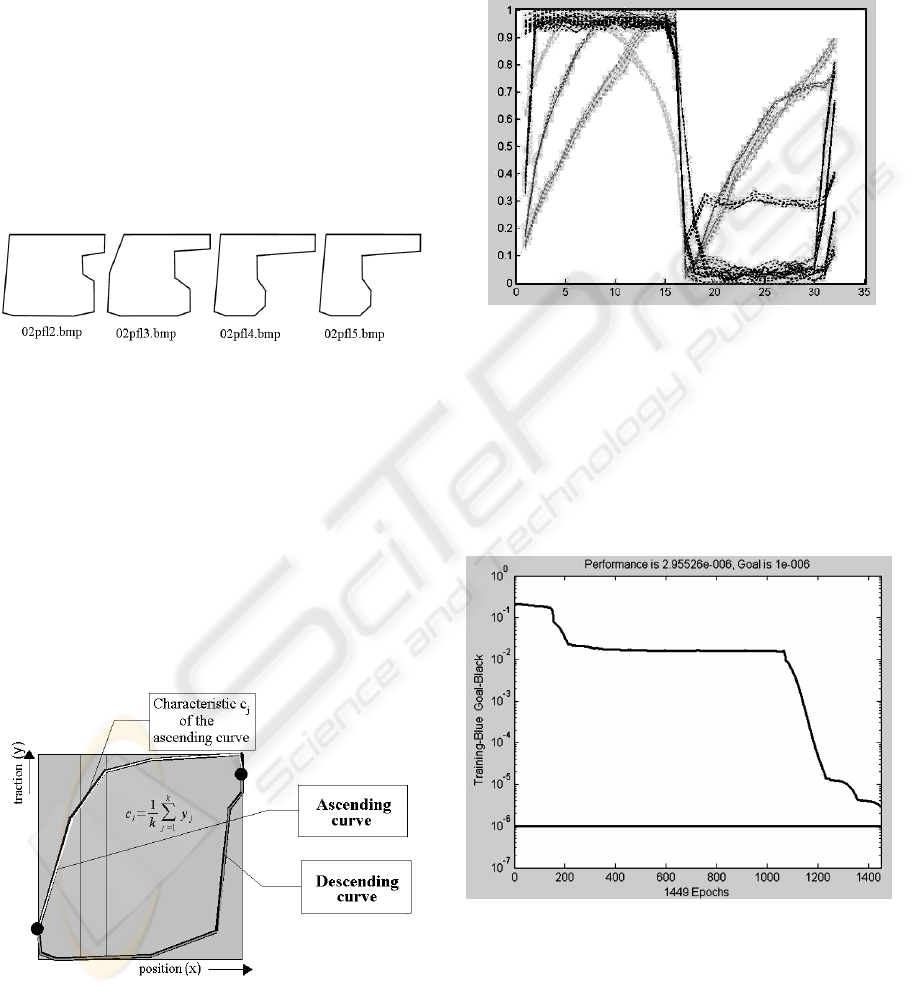
The first step to obtain the artificial standards
was to generate an image set in bit map, based on
models, and using image manipulation software
(Photoshop ver. 8.0.1). Figure 4 illustrate a set of 4
images that represents the class of cards with fluid
pound and in situations ranging from small to large
gravity.
A set of 100 points was obtained from each
image. These points are arranged in values of
position (x axis)
and traction (y axis), where half of
them establishes the ascending curve of the pump
whereas the other half forms the descending curve of
the pump.
Figure 4: Bit maps from some fluid pound models.
These sets have been normalized and two sets of
artificial cards were generated: one for the training
of the network and another one for the validation.
Each of these sets consists in 8 different classes with
300 downhole dynamometer artificial cards by each
class.
Here a characteristic extractor that uses vertical
projections of the ascending and descending curves
was used. This is shown in Figure 5. Acceptable
results were obtained with a set of 16 projections of
the descending curve and also 16 projections of the
ascending curve.
Figure 5: Characteristic extractor.
This allowed a reduction of the dimension of the
space from 200 (corresponding to 100 pairs of
values of potion and traction) to just 32.
Figure 6 shows the output of the 32 outcomes
from the plunger hitting top for the several families
of artificial downhole dynamometer cards.
One can verify that each family of artificial
downhole dynamometer cards holds a well-defined
recognizable signature.
Figure 6: Output of the characteristic extractor.
Several tests were carried out and the results
achieved were satisfactory. The ANN type used was
feed forward with 32 inputs, 16 neurons in the
hidden layer and 8 neurons at the possible output
layer. Sigmoid transfer function was used in the two
last layers.
Figure 7 shows the network training results, for
which it was used the algorithm TRAINGDX.
Figure 7: Training results from the ANN classifier.
After the training the network validation was
performed using now the second set of artificial
cards with 100% correct results.
For the final test the 6101 real downhole
dynamometer cards were used and the following
result was achieved:
ICEIS 2009 - International Conference on Enterprise Information Systems
354

a) 11 card were not classified since the neurons
at the output layer held values below the limit
established by the criteria (0,1).
b) 69 cards were wrongly classified. However,
from these 69 cards, 30 of them were cards pre-
diagnosed as “plunger hitting top” when in fact they
were “normal”
Figure 8: Error analysis in the classification.
When the above results were shown to a human
expert, he observed that he would have considered
as an acceptable diagnosis produced by the artificial
neural network. That represents a considerable
improvement in the results.
Summing it up, from the 6,101 cards which were
tested, the total classification error was found to be
1,31%.
5 CONCLUSIONS
The present work shows that the generation of
artificial standards for training neural networks in
order to analyze the pump mechanic system in oil
elevation is feasible. The results shown here leave
open the possibility of creating a scheme that not
only incorporate the complete set of classes of
anomalies, but which is also able to integrate the
data base of real automation systems.
ACKNOWLEDGEMENTS
To PETROBRAS for letting available information
on real data for realizing the tests here. Also to the
Graduation Program in Mechatronics of UFBA
(Universidade Federal da Bahia) for the support
given.
REFERENCES
Abello, J., A. Houang and J. Russell. (1993). A Hierarchy
of Pattern Recognition Algorithms for Diagnosis of
Sucker Rod Pump Wells, IEEE 08186-4212-2/93, pp
359-364.
Derek, H. J., J. W. Jennings and S. M. Morgan. (1988).
EXPROD: Expert Advisor Program for Rod Pumping,
SPE 17318.
Dickinson, R. R. and J. W. Jennings. (1988). The Use of
Pattern Recognition Techniques in Analyzing
Downhole Dynamometer Cards, SPE 17313.
Eickmeier, J. R. (1966). Applications of the Delta II
Dynamometer Technique, 17th Annual Technical
Meeting, The Petroleum Society of C.I.M., Edmonton,
maio/1966.
Haykin, Simon (1998). "Neural Networks: A
Comprehensive Foundation", Second Edition. Prentice
Hall.
Foley, W. L. and J. G. Svinos. (1987). EXPROD: Expert
Advisor Program for Rod Pumping, SPE 16920.
Gibbs, S. G. and A. B. Neely. (1966). Computer Diagnosis
of Down-Hole Conditions in Sucker Rod Pumping
Wells, Journal of Petroleum Technology, jan/1966, pp
91-97.
Gilbert, W. E. (1936). An Oil-Well Pump Dynagraph.
Production Practice, Shell oil Co., pp 94-115.
Schinitman, L., G. S. Albuquerque, J. F. Corrêa, H.
Lepikson and Bitencourt, A. C. (2003). Modeling and
implementation a system for sucker rod downhole
dynamometer card pattern recognition, SPE 84140.
Xu, P., S. Xu and H. Yin. (2006). Application of self-
organizing competitive neural network in fault
diagnosis of suck rod pumping system, Journal of
Petroleum Science & Engineering, 58 (2007) pp 43-
48.
PATTERN RECOGNITION FOR DOWNHOLE DYNAMOMETER CARD IN OIL ROD PUMP SYSTEM USING
ARTIFICIAL NEURAL NETWORKS
355
