
A SHAPE ERROR CONCEALMENT TECHNIQUE FOR ROBUST
MPEG-4 SYSTEM
Shih-Chang Hsia and Cheng Hung Hsiao
Department of Computer and Communication Engineering, National Kaohsiung
First University of Science and Technology, Kaohsiung, Taiwan, R.O.C.
Keywords: MPEG-4, Shape information, Error concealment, Interpolation.
Abstract: This paper presents a fast-efficient error concealment method for recovering the shape information. The
proposed technique consists of the block classification, the edge direction interpolation and the filtering
interpolation. The missing block with the logic criterion is classified to four types that are transparent,
opaque, edge and isolated blocks. Most of the computations cost on the edge block and the isolated block to
obtain better cost-performance tradeoffs. For the edge-block recovery, the edge slope is computed by
referring the near available block, and then the missing shape is interpolated along the edge direction. We
deal with the isolated block using the cascaded filter to approximate the real shape. The experimental results
show that the proposed method can achieve better cost-performance to restore the shape information
compared to the other competing algorithms in both of the numerical parameters and the shape images. The
processing speed is faster about 2~3 times to the well-known methods. The adaptive algorithm employed
the low computational load overhead to make it applicable to a real-time MPEG-4 coding system.
1 INTRODUCTION
Recently the MPEG-4 system enables content-based
functionality, as well as high coding efficiency, by
taking into account shape information for the low
bit-rate system (Jan, 1999). If the shape information
cannot be reconstructed, the decoded object would
produce very serious distortions. Recently, there are
some literatures focused on the error concealment
techniques for shape recovery (Lee et al., 2001,
Salama and Huang, 2002, Li et al., 2002, Soares and
Pereira, 2004). Lee, etc. al. used the fuzzy theory to
recover the shape error (Lee et al., 2001). First, the
error block is computed with the bilinear
interpolation. Then the result is modified according
to their fuzzy membership function to truncate the
pixel to a binary form with one threshold. Shirani
etc. al. presented a novel error concealment method
for recovering shape information (Salama and
Huang, 2002), which iteratively interpolate the
missing pixel with a set of weight along eight
directions. With iterative procedures, the error shape
is recovered better and better. Li etc. al. proposed
recursive error concealment to recover the shape
information (Li et al., 2002). With line-correction,
line-prediction and line detection approaches, the
recovered shape error can be kept in small distortion.
However, we hardly estimate the computational time
for this approach, which is away from real-time
applications.
This paper presents a new method to recover the
object shape for the intra frame and still image. The
proposed algorithm consists of the block
classification scheme and the edge interpolation, to
achieve better quality but using low computational
cost. This paper is organized as follows. The
proposed algorithm for shape recovery is presented
in Section II. The simulation results and
comparisons with other approaches are shown in
Section III. Concluding remarks are outlined in
Section IV.
2 THE PROPOSED ALGORITHM
Figure 1 illustrates the processing flow of the
proposed algorithm. According to the feature of
neighboring blocks, the processed block can be
classified into four groups. If the neighboring blocks
all are dark or bright, the current block should be an
opaque or transparent block. This block is easily
recovered since we can directly replicate the data
103
Hsia S. and Hsiao C. (2009).
A SHAPE ERROR CONCEALMENT TECHNIQUE FOR ROBUST MPEG-4 SYSTEM.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 103-106
DOI: 10.5220/0002164001030106
Copyright
c
SciTePress
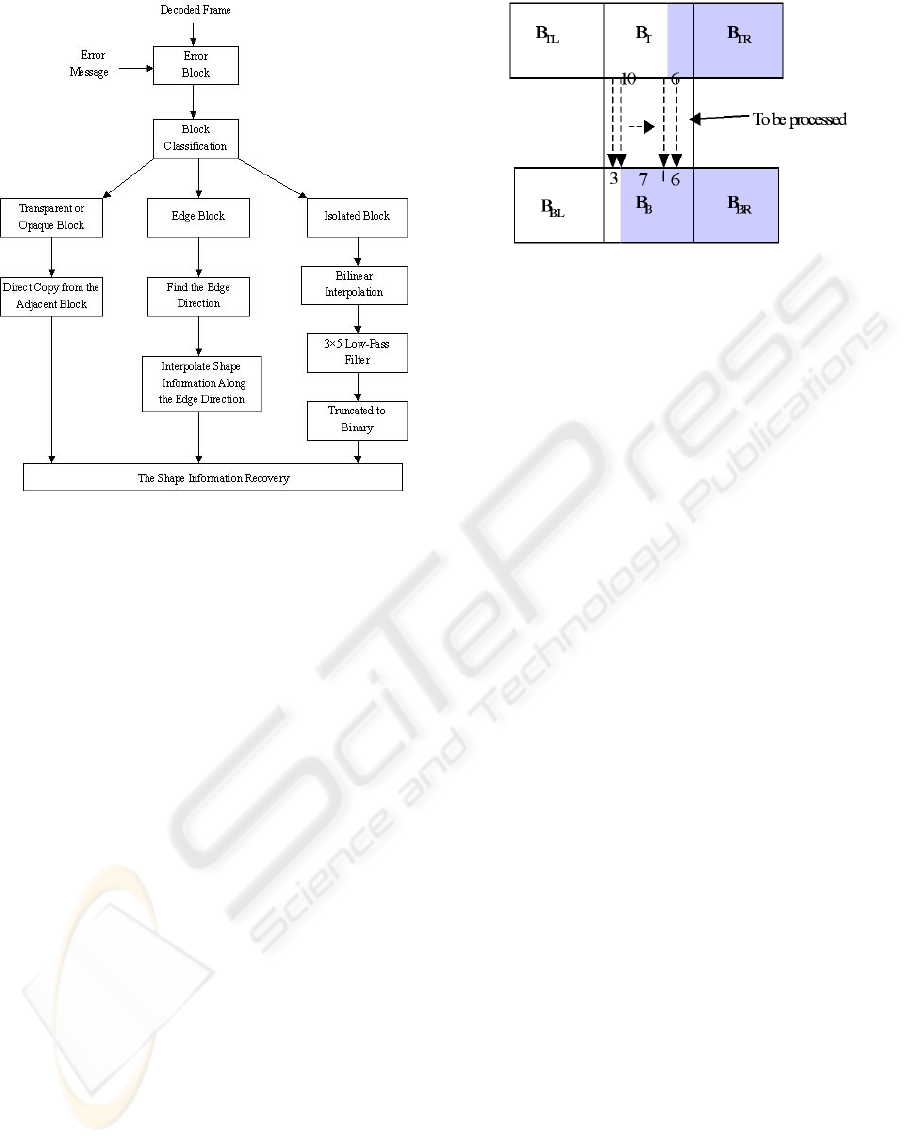
Figure 1: The flowchart of the proposed shape recovery.
with the adjacent pixels. However, when the
neighboring blocks contain the edge information that
is partial dark and partial bright, we try to find the
edge direction for interpolating the shape. The last
is an isolated block that its neighboring blocks are
different groups. This block always locates at the top
or bottom of object, which is difficult to be
recovered perfectly.
Figure 2 illustrates the position of the missing
block processing. If the B
T
, B
B
, B
TL
, B
TR
, B
BL
and
B
BR
blocks all are zero (or one), the current block
belongs to an opaque (or transparent) block. We
only fill the zero or one for all missing pixels
without computations. If the T-block and B-block
have the edge information, the lost block would be
an edge block, where T-block is defined by
consisting of blocks B
TL
, B
T
and B
TR
, and B-block
combining with blocks B
BR
, B
B
and B
BR
. The block
can be classified according to the information of T-
block and B-block. To fasten processing, the simple
AND and OR operations are used. We define
“T_{and}” function that the boundary pixels of the
B
TL
, B
T
and B
TR
blocks (T-Block) are performed
with AND function as
)...
......(}_{
12101
2101210
−−
−
•••••
••••••=
N
TRTRTRTR
N
T
TTT
N
TLTLTLTL
BBBBB
BBBBBBBandT
(1)
,where
B and B ,B
i
TR
i
T
i
TL
is the i
th
boundary pixel
of blocks B
TL,
B
T
and B
TR,
respectively. If the block
size is N×N, we need to perform (3N-1)-bit AND
Figure 2: The block position.
operations. By the same concept, “B_{and} “,
“T_{or}” and “B_{or}” are defined to perform the
AND function of B-block, the OR function of T-
block and the OR function of B-block, respectively.
Table-1 lists the block classification with T_{and},
B_{and}, T_{or} and B_{or}. Obviously, if all
operation results are zero or one, which be an
opaque or transparent block. While T-block and B-
block have the edge information, the partial data is
zero or one. Hence the T_{and} and B_{and} should
be zero, but T_{or} and B_{or} are one. There are
four cases. For case 1, the background is dark and
the missing block is at the top of object, the result of
T_{and}, B_{and}, T_{or} and B_{or}={0001}.
For case 2, the missing block changes to at the
bottom of object, and the following result is {0010}.
If the background is bright, the results of the bottom
and top of object are {0111} and {1011} for case 3
and 4 respectively.
For an edge block, XOR operation is used to
estimate the edge direction. If the block size is N×N,
the XOR of the block B
T
and B
B
is performed by
),.......,,(
111100 −−
⊕⊕⊕=
N
B
N
TBTBT
BBBBBBES
(2)
to denote the edge shift (ES) between the two
blocks.
B and B
i
M
i
T
is the i
th
boundary pixel of
blocks B
T
and B
B.
For example, in Figure 2, ES
=(0,0,0,1,1,1,1,1,1,1,0,0,0,0,0,0). ES_one=7 is by
counting the number of one. The ES value is used to
find the vector distance for the missing block. The
missing block is interpolated with along the edge
direction of the blocks B
T
and B
B
. Since the shape
information is binary, first we can fill 0 and 1 for
two-line values along the edge direction. The
proposed algorithm is available for the vertical edge
blocks, but fail for horizontal edges. The horizontal
edge block is classified to the isolated block type
since its adjacent top and bottom blocks belong to
different block groups.
SIGMAP 2009 - International Conference on Signal Processing and Multimedia Applications
104
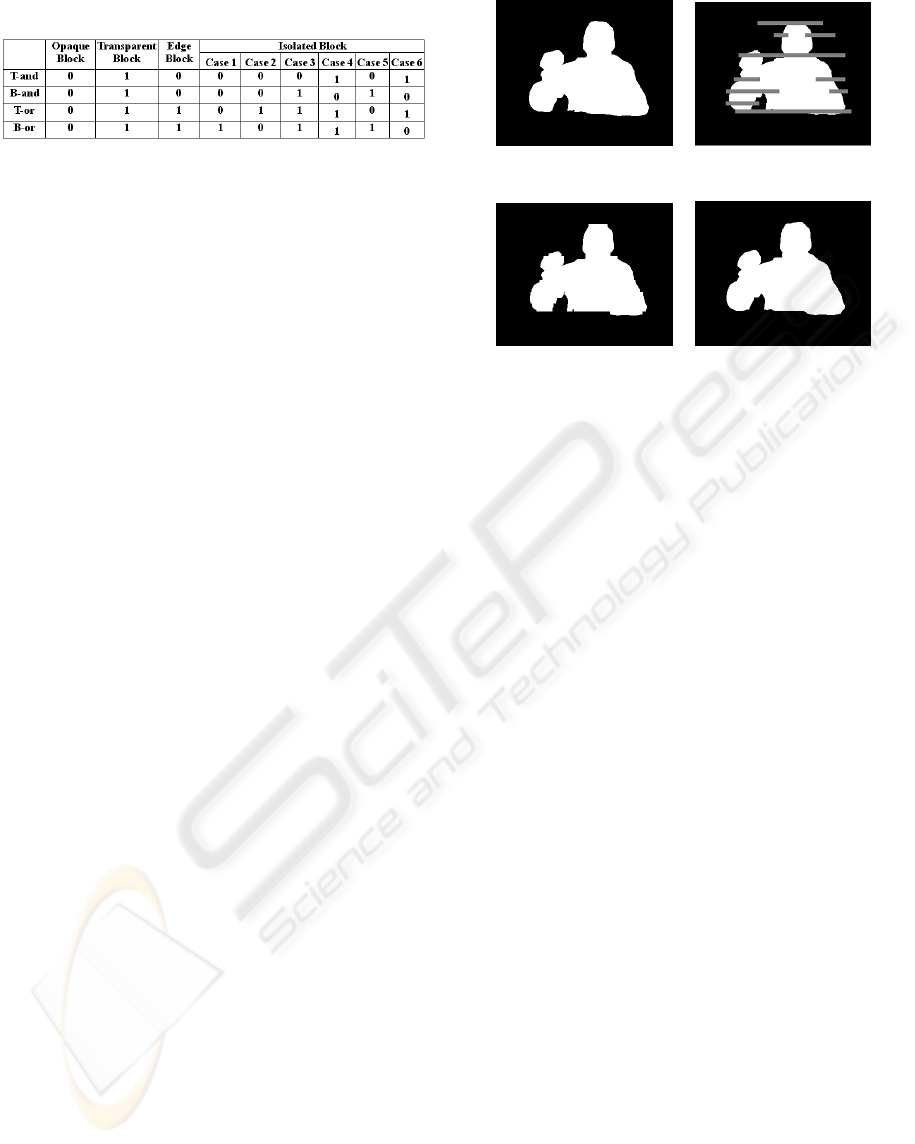
Table 1: Block Classification with the Boundary Pixels.
For isolated block processing, we proposed a
filtering interpolation to recover the isolated block
efficiently. With the processing flow of Figure 1,
first we do the linear interpolation for the lost block
with the boundary pixels of B
T
and B
B
blocks. As
N=16, the pixel of the first vertical line can be
interpolated by line interpolation. The interpolation
result will be gray level since the top block B
T
is
high and the bottom block B
B
is zero level.
To
recover the error blocks to near real shapes, the
interpolated value is further processed with a low-
pass filter. Our motivation is that we attempt to use
the low-pass filter to spread the normal shape
information of the neighbor blocks to modify the
gray level of the error block to recover the shape. If
the processing window covers the object pixels that
its level is 255, the gray level of error pixel after
low-pass filtering will increase. As closer to the
background, the level will decrease since the
window covers more black pixels. This approach
can modify the bilinear interpolation result for the
lost block to approach the practical object shape.
Finally, the gray-level is truncated with a threshold
to become the binary shape data. The threshold
value is adaptive according to the neighboring
available shape block. If the processed block is close
to the object, the threshold will be increased.
However, when the processed block possibly cannot
be decided according to the case of the Table-1. The
non-defined block types are also processed with the
same as the processing flow of the isolated block.
3 SIMULATIONS
To evaluate the performance of the proposed
algorithm, three video sequences “TV”, “Salesman”
and “Irene” are selected. The data is encoded with
MPEG-4 encoder. There are possibly partial or
complete slice errors by error patterns. The block
size used 16×16, so there are 16×16×m data
corrupted, where m is the number of error blocks.
The error rate is about in the bounding box. Figure 3
and 4 shows the original shape and error shape with
20% ~30% error for “Salesman”. First, we employ
the bilinear interpolation to fill the missing block
and then to truncate the interpolated results with the
Figure 3. Figure 4.
Figure 5. Figure 6.
threshold 127. We find that the performance is poor
since the shape outline has great distortion, as shown
in Figure 5. The fuzzy theory is used to refine the
result of bilinear processing. The data is first
processed with bilinear interpolation and then the
result is revised with its fuzzy decision rule. The
final result is also truncated to get the binary shape
information. The result is better than that of the
bilinear method. Next, the shape information is
recovered with our proposed algorithm. First, we
classify the processed block with our algorithm. The
complete result is shown in Figure 6 for “Salesman”
sequence from the error shape in Figure 4. The
proposed technique outperformed all the others
against which it was compared. The edge error
concealment algorithm can recover most of shape
information. The 3-stage low-pass filter is used for
isolated blocks in experiments. If the lost block has
high-variance in its shape, it faces difficulty to
conceal errors for the block from neighboring slices.
In the special case, the missing block in bottom is
simulated with the Figure 5. Clearly the B-blocks are
not available. However, we need two-boundary data
for the bilinear interpolation. For simulations, the
non-available pixels use the zeros for bilinear
computations. The results from bilinear and fuzzy
interpolations are poor. The proposed algorithm
recovers the shape information for the missing block
in bottom along the edge direction.
For numerical analysis, we also can compute the
error value by comparisons with the original shape
image and the restored image. The number of error
points is checked by XOR operation of the original
shape image and the restored image. If the pixel of
the restored image is different from the pixel of the
original shape image at the same position, the result
of XOR operation becomes high. When all pixels are
compared with XOR operation, the number of
A SHAPE ERROR CONCEALMENT TECHNIQUE FOR ROBUST MPEG-4 SYSTEM
105

“high” is counted to denote the number of error
points that is used to adjudge the performance of
error recovery. Besides, we can segment the object
from the image according to the decoding shape
information after error concealment processing.
The error is estimated with the distortion ration and
the number of error points. Table-2 lists the DR result
Table 2: Comparisons with DR and Recovery Error Points
from Various Algorithms.
and the error points from recovery with the bilinear,
fuzzy (Lee et al., 2001) and proposed methods,
respectively. The distortion rate (DR) can be
evaluated with
%100×=
Size
F
rame
Point Error of Numuber
DR
(3)
If the shape is more complex, the performance of
error concealment will be reduced since the detail
content is difficult to recover. The results shown that
our performance is better than the bilinear
interpolation and the fuzzy theory. The
computational complexity is an important term for
real-time applications. The computational load of the
proposed algorithm is adaptively dependent on what
kind of the block.
With the logic criterion to classify the block type,
we can save the computational power for the opaque
and transparent block since these blocks can be
simply restored without any distortion. As for the
edge block, we only employ logic operations to find
the edge direction and to interpolate the shape data
between the T-block and B-block. The
computational load is not high. Most of the
computations cost for the isolated block to achieve
better quality. We employ the local filtering
approximated approach for the isolated block
processing. In fact, the number of edge and the
isolated blocks in the error sequence will dominate
both the complexity and the reconstructed quality.
The statistic analysis from the practical experiments,
the transparent and opaque blocks occupy about
60% of the full missing data. The edge block and
isolated block is about 30% and 10% respectively,
but being dependent on the error pattern. Due to
most of the processing blocks without using
computations, the computational complexity of the
proposed system is low. Experiments result that our
computation time is about 50% and 30% of the
bilinear and fuzzy method respectively. Therefore,
the proposed method is suitable applied on low-cost
and high-speed video coding products.
4 CONCLUSIONS
This paper presents a fast high-efficiency method for
the shape information recovery. First, the processed
block is classified into four catalogs and then we
employ various techniques to process the different
block to restore the shape information with better
cost-performance. We do not waste any
computational power for the simple opaque and
transparent blocks since these blocks are easily to be
restored by copying the neighboring pixels. Instead,
we make more computations for the edge block and
isolated block because these blocks quality will
greatly determine the recovery performance. To
restore the edge block, we proposed an edge-
oriented algorithm that employed the boundary
matching with the simple logic operations rather
than complex computations. Then, we used spatial
interpolation to recover the edge information of a
missing block from the result of boundary search.
But the boundary matching method fails to recover
the isolated block. Instead, the filtering interpolation
is used to recover the shape information for the
isolated block. The results demonstrate that the
shape information can be efficiently restored, but
using low computational load to make it applicable
to real-time systems. Hence the proposed algorithm
is very valuable for the shape recovery while
applying for high robust MPEG-4 systems.
REFERENCES
Jan. 1999. Coding of audio-visual objects: video,MPEG 4
, ISO/IECJTC/SC29/WG11.
P. J. Lee, L. G. Chen, 2001. W.J. Wang and M.J. Chen,”
Robust error concealment algorithm for MPEG-4 with
the aids of fuzzy theory”, IEEE International
Conference on Consumer Electronics, PP. 154-155.
P. Salama and C. Huang, 2002. ” Error concealment for
shape coding”, International Conference on Image
Processing, September 22-25, pp.II-701-704.
X. Li, G.M. Schuster and A.K. Katsaggelos, 2002. “A
recursive shape error concealment method,” IEEE
International Conference on Image Processing,
September 22-25, pp.I-177-180.
L. D. Soares and F. Pereira, Apr. 2004. “ Spatial shape
error concealment for object-based image and video
coding”, IEEE Trans. Image Processing, vol. 13, no.4
pp. 586-599.
SIGMAP 2009 - International Conference on Signal Processing and Multimedia Applications
106
