
RESAMPLING BASED ON STATISTICAL PROPERTIES OF DATA
SETS
Julia Bondarenko
Department of Economic and Social Sciences, Helmut-Schmidt University Hamburg
(University of the Federal Armed Forces Hamburg), Holstenhofweg 85, 22043 Hamburg, Germany
Keywords:
Resampling, Classification algorithm C4.5, Uniform/(truncated) Normal distribution, Kurtosis, Chi-squared
test, Kolmogorov-Smirnov test, Traffic injuries number.
Abstract:
In imbalanced data sets, classes separated into majority (negative) and minority (positive) classes, are not ap-
proximately equally represented. That leads to impeding of accurate classification results. Well balanced data
sets assume uniform distribution. The approach we present in the paper, is based on directed oversampling of
minority class objects with simultaneous undersampling of majority class objects, to balance non-uniform data
sets, and relies upon the certain statistical criteria. The resampling procedure is carried out for the daily traffic
injuries data sets. The results obtained show the improving of rare cases (positive class objects) identification
with accordance to several performance measures.
1 INTRODUCTION
Numerous machine learning classification methods
currently give good performance in numerous prac-
tical problems, such as diagnosing medical problems,
speech recognition, expert systems, robotic process-
ing etc. A starting point for the present study was
an investigation of road injuries number within the
framework of the joint project with police depart-
ments of one of German federal states. The presented
work focuses on temporal factors impact on daily traf-
fic injuries number. The initial data sets of traffic
injuries are imbalanced: daily injuries numbers are
not approximately equally represented, that is, sepa-
rated into majority (negative) and minority (positive)
classes. As a result, minority class is poorly per-
formed by classification (S. Ertekin and Giles, 2007),
(S. Kotsiantis and Pintelas, 2006). But our aim is to
detect efficiently the important rare cases in number
of injured persons. In fact, the ability to predict pe-
riods of high incidence of road accidents, is really
essential. Rebalancing the class distributions for the
further classification, which includes over- and under-
sampling techniques, can be applied in order to solve
this problem at the data level. We propose here a sim-
ple and general resampling procedure, improving a
classification performance of daily road injuries num-
ber.
Oversampling method balances data set by in-
creasing the number of minority class objects (ex-
amples). The simplest oversampling method - ran-
dom oversampling - increases the minority class size
by randomly replicating existing minority class ex-
amples (oversampling with replacement). This tech-
niques is attractive exactly due to its simplicity, but
unfortunately, since random oversampling only repli-
cates existing data, it does not add any actual informa-
tion to the data set. The another approach is to over-
sample the positive minority class by creating new ex-
amples. SMOTE (Synthetic Minority Over-Sampling
Technique, see (N. Chawla and Kegelmeyer, 2002))
is the most popular oversampling method here. In
SMOTE minority classes are oversampled by generat-
ing ”synthetic” examples of minority class and adding
them to the data set. As a result, the class distribution
in the data set changes and probability of correctly
classifying minority class increases. Other oversam-
pling approaches were also proposed ((V. Garcha and
Mollineda, 2008), (H. Han and Mao, 2005)). Under-
sampling approaches try to decrease the number of
major class examples. However this method may in-
volve information loss (that is, discard potentially im-
portant for learning and prediction examples, see (X.-
Y. Liu and Zhou, 2006)).
Naturally, well balanced data sets assume uniform
distribution. The approach we present in the paper,
is based on directed oversampling of minority class
objects with simultaneous undersampling of major-
143
Bondarenko J.
RESAMPLING BASED ON STATISTICAL PROPERTIES OF DATA SETS.
DOI: 10.5220/0002171701430148
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-8111-99-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
ity class objects, to balance non-uniform data sets (to
ensure the uniform distribution), and relies upon the
statistical criteria. The remaining parts of the paper
are organized as follows. In Section 2, we discuss
the initial injuries data sets used in our work and per-
form their classification according to several metrics.
Resampling procedure description and new classifi-
cation results are presented in Section 3. Section 4
contains conclusions, brief discussion of ongoing and
potential future research topics.
2 CLASSIFICATION OF INITIAL
DATA SETS
2.1 Data Sets and Attributes
Data sets used in our study include the daily num-
ber of injured persons in traffic accidents in two cities
of North Rhine-Westphalia, Germany - Duesseldorf
and Duisburg, for the period 2004-2006. The daily
data for each city represent an age group 25-59 years
old people. Table 1 shows the mean, mode, median,
minimum and maximum values for each region, as
well as skewness and kurtosis, which are the mea-
sures of the data sets asymmetry and peakedness, re-
spectively. Note, that we removed before all ”heavy”
outliers from the data sets, as sensitive to outliers.
”Heavy” outliers are identified as all values more than
3IQR above the 3rd or below the 1st quartile, where
IQR = Q
3
−Q
1
is interquartile range, Q
3
and Q
1
are
3rd and 1st quartiles correspondingly.
Table 1: Descriptive Statistics of Data Sets.
value Duesseldorf Duisbirg
mean 5.03 2.43
min 0 0
max 19 12
mode 4 1
skewness 0.65 0.92
kurtosis 3.67 4.02
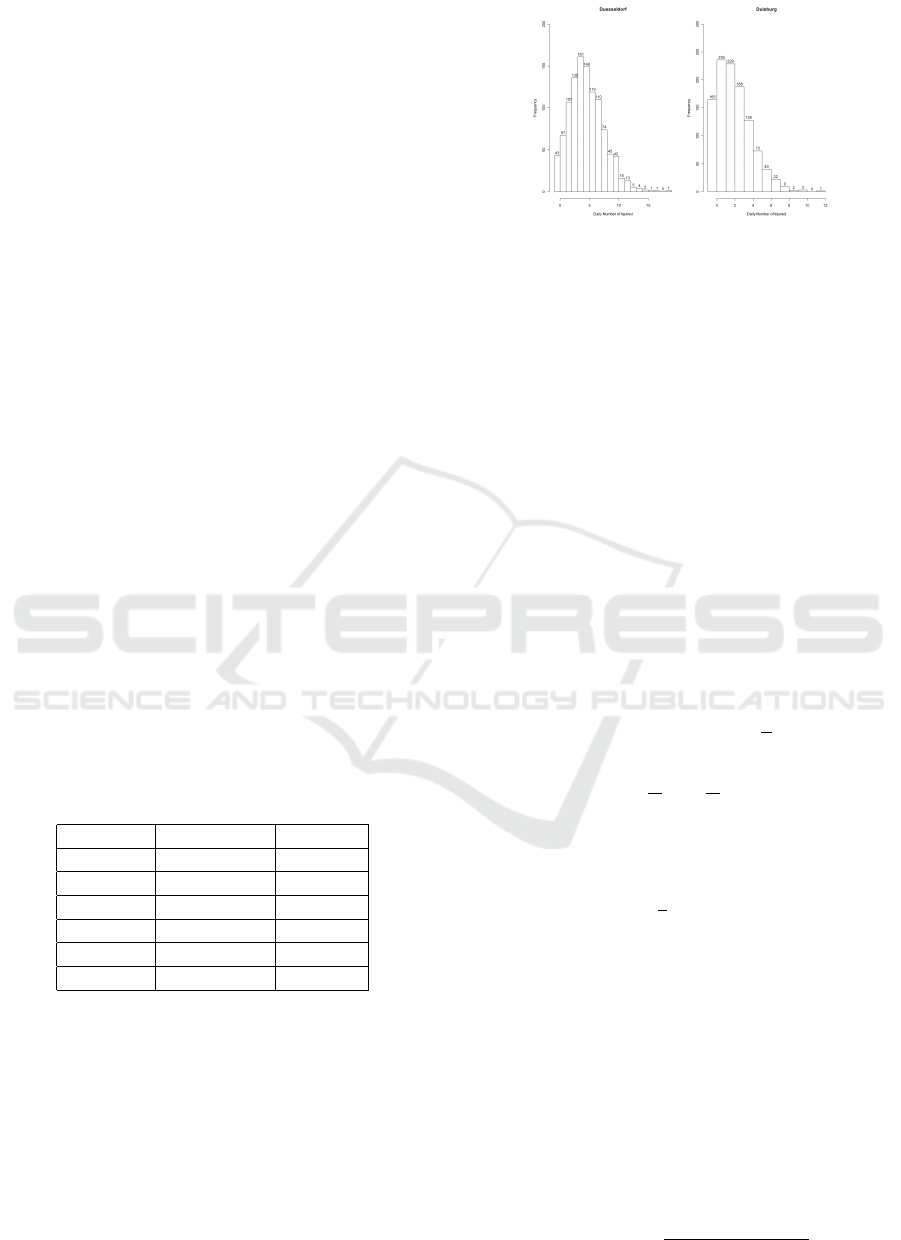
Histograms showing distribution of injured per-
sons for each urban region for period 2004-2006, are
presented in Figure 1.
Let Y
i,t
be the number of injured at the day t, t =
1, ..., 1096 (3 years, 2004-2006) in region i, i ∈ I =
{
1, 2
}
(1=Duesseldof, 2=Duisburg). We treat as at-
tributes the certain day features related to correspond-
ing outcomes Y
i,t
, namely:
• year: 1=2004, 2=2005, 3=2006;
• month: 1=January, 2=February,..., 12=December;
Figure 1: Histograms of Daily Number of Traffic Injured
Persons for Age Range 25-59, 01.01.2004-31.12.2006.
• school vocation day: 1=yes or 0=no;
• holiday (official): 1=yes or 0=no;
• weekday: 1=Monday, 2=Tuesday,..., 7=Sunday;
• bridge day: 1=yes or 0=no.
The distribution for Region 1 looks roughly sym-
metric and just lightly (positively) skewed, data set
for Region 2 shows more skewed behavior. Each data
set has relatively narrow range of values - 0 ÷19 for
Region 1 and 0 ÷12 for Region 2.
A number of algorithms has been developed for
decision tree construction, but we will dwell upon one
of them - C4.5-algorithm (Quinlan, 1993), based on
the computing the metrics known as the information
gain (IG) and gain ratio (GR). We introduce a notion
of IG as follows:
IG(S
n
, A) = E (S
n
) −
∑
i∈values(A)
l
i
n
E (S
A
i
) , (1)
where E (S
n
) = −
∑
k
n
k
n
log
n
k
n
is entropy of the en-
tire data set S
n
= (Y
1
, ...,Y
n
) of size n, n
k
is the number
of instances in S
n
with value k, E (S
A
i
) is entropy of
the sample S
A
i
of size l
i
involving elements from Y,
which correspond to the outcome (value) A
i
of the at-
tribute (feature) A, and
l
i
n
represents the fraction of the
data in S
n
that goes into S
A
i
.
In C4.5 algorithm below we adopt the information
gain ratio to select the best day attribute to branch on
at each stage. Attribute with the highest gain ratio
gives us the crucial information concerning the tem-
poral distribution of traffic injuries number inside the
each region.
The formula aggregates over the different values
A
i
attribute A can have. But IG would be biased to-
wards selecting attributes with more values. To miti-
gate this effect, we use a normalized version of IG -
Gain Ratio (GR), defined as follows:
GR(S
n
, A) =
IG(S
n
, A)
Split In f o (S
n
, A)
, (2)
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
144

where split information Split In f o (S
n
, A) =
∑
i∈values(A)
l
i
n
ln
l
i
n
is the entropy of partitioning, or
in other words, entropy associated with the distri-
bution of the attribute A, where
l
i
n
is the probability
(proportion) of observing the ith value of A. Thus, a
large number of small partitions is penalized there.
2.2 Evaluation Measures
In the first place, we employ the Accuracy traditional
metric, that is the percentage of the correctly classi-
fied data. An information about actual and predicted
examples is contained in confusion matrix (Kohavi
and Provost, 1998). The entries in the confusion ma-
trix have the following meaning in our problem:
T N is the number of correct predictions that an exam-
ple is from negative class;
T P is the number of correct predictions that an exam-
ple is from positive class;
FN is the number of incorrect predictions that an ex-
ample is from negative class;
FP is the number of incorrect predictions that an ex-
ample is from positive class.
The Accuracy is computed then as a proportion:
Accuracy =
T P+T N
T P+T N+FP+FN
.
But for classification of imbalanced data sets,
accuracy is no longer a proper measure since mi-
nority class has very small impact on the accuracy.
Therefore, the following alternative evaluation mea-
sures (metrics) were proposed and used, for instance,
in (G. Cohen and Geissbuhler, 2005), (Hido and
Kashima, 2008), (Kubat and Matwin, 1997):
- True Positive Rate (TPR), or Recall. The pro-
portion between correctly classified positive examples
and that are calculated: Recall= T PR =
T P
T P+FN
.
- Precision. The proportion between correctly
classified positive examples and that are actually cor-
rect: Precision=
T P
T P+FP
.
- G-mean (Geometric mean). Tries to maxi-
mize the accuracy on each of the two classes while
keeping these accuracies balanced: G − mean =
√
Positive Accuracy ∗Negative Accuracy,
where Positive Accuracy =
T P
T P+FN
=Recall,
Negative Accuracy =
T N
T N+FP
.
- F-measure. ”The trade-off” between precision
and recall, drops rapidly if either precision or recall is
poor: FM =
2Recall∗Precision
Recall+Precision
.
2.3 Classification Results
In Section 2.1 we have noted that each data set
S is kept within a certain limited relatively nar-
row range of values. That allows us to consider
every value of the range ν
i
, where v = (v
i
)
T
=
(min(S), ..., max(S))
T
, as a separate class:
Class 1: ”0 Injured Persons per Day”, Class 2: ”1
Injured Person per Day”,..., Class r ”r Injured Persons
per Day”, where r = 19 + 1 = 20 for Region 1 and
r = 12 + 1 = 13 for Region 2. Thus, we transform
here count data into categorical ones. Of course, we
could group the data or consider continuous data as
well.
We make no assumption about the distribution of
the daily number of persons injured in traffic acci-
dents, except its unimodality during the resampling
procedure. The unimodality of initial data sets is also
established in the frequency distribution histograms,
see Fig. 1. Remind, that a distribution is called uni-
modal if there is only one major ”peak” (mode) in the
distribution. Let M be mode of the data set, and ϕ
M
-
its frequency. We select all values of daily number of
injured persons ν, those frequencies are lying within
the interval from 0.8 ϕ
M
till ϕ
M
, to be ”negative”, or
majority, class S
neg
. All the other values combined
together represent ”positive”, or minority, class S
pos
.
The classification procedure with algorithm C4.5
gives the following results for both regions, which
we present below. The classification is performed by
means function J48() implemented in RWeka pack-
age, R statistical software. The minimal number of
instances per leaf we set to 20. The evaluation mea-
sures defined in previous subsection, are computed ei-
ther.
The classification results for both regions are reported
below. Only about 18% of examples are classified
correctly for Region 1, with low magnitudes of alter-
native measures.
CLASSIFICATION RESULTS FOR REGION 1:
Correctly Classified Instances 18.3394 %,
Recall = 0.1325, Precision = 0.0676,
G-mean = 0.1650, F-measure = 0.0895.
Majority (negative) class is presented here by
numbers 3, 4 and 5. All the others are classified into
the minority class. For the Region 2 we have at the
beginning about 26% of correctly classified examples
CLASSIFICATION RESULTS FOR REGION 2:
Correctly Classified Instances 26.2774 %
Recall = 0.2449, Precision = 0.1347,
G-mean = 0.2577, F-measure = 0.1738.
Consistently, negative class consists of numbers 1, 2
and 3, the rest of the numbers is in positive class. In
the next Section we describe a resampling strategy,
which improves classification performance.
RESAMPLING BASED ON STATISTICAL PROPERTIES OF DATA SETS
145

3 NEW RESAMPLING
PROCEDURE
3.1 Resampling Motivation and
Procedure Illustration
As one can see, in both our data sets, the examples
from minority class are much less ”beloved” by clas-
sification algorithm than from majority one (common
problem of imbalanced data). Below we present an
algorithm, which resizes/rebalances our data sets.
With accordance to certain criteria, we generate
artificial data from minority class and simultaneously
withdraw data from majority class, until the classes
are approximately equally represented (data are
uniformly distributed). It may be considered as a
preprocessing procedure for further classification and
prediction.
The algorithm assumes unimodal character for
frequency distribution of classes, without reference to
skewness (asymmetry) of the distribution. Majority
classes are concentrated around peak M (Figure 2a),
while minority classes are more tails-sited. Our
suggestion is to generate new synthetic data from
singly left- and right-truncated normal (half-normal)
distributions, with truncation points u
le f t
= min(S)
and u
right
= max (S), respectively, where u
le f t
and
u
right
are also the means of truncated normal distri-
butions. At the same time, we flatten the peak of
distribution, picking out the data placed around it.
Such combination of the oversampling the minority
class with undersampling the majority class helps to
achieve better classifier performance.
If more detailed, a random variable is said to be from
a left-truncated normal distribution if its density is
f (x) =
q
√
2πσ
exp
−
(x −m)
2
2σ
2
!
for x ≥u
le f t
, f (x) = 0 for x < u
le f t
, (3)
where m is a mean and σ is a standard deviation of
the distribution, q is a normalizing quantity with value
obtained from the equation
R
∞
u
le f t
f (x)dx = 1. A right-
truncated normal distribution is defined analogously.
We discard elements outside the limit points u
le f t
and
u
right
, and choose m
le f t
= u
le f t
and m
right
= u
right
.
This guarantees, that the least popular classes lying
at the ends of data range interval, will be treated
most intensive. Choosing the desired level of signif-
icance α , we put the critical points (confidence inter-
vals endpoints with 100 (1 −α)% -confidence level)
C
1−α
le f t
and C
α
right
for both truncated distributions equal
to M. Thus, the majority class will be also main-
tained, as artificially generated data can be also out
of endpoints C
1−α
le f t
and C
α
right
. The standard devia-
tions of the truncated normal distributions can be ob-
tained as σ
le f t
=
M−m
le f t
C
1−α
and σ
right
=
m
right
−M
C
α
, where
C
α
, C
1−α
are critical values of truncated at 0 stan-
dard normal distribution. For example, for α = 0.05:
C
1−α
= −C
α
= 1.959964. This is shown schemati-
cally in Figure 2b.
Figure 2: Scheme of Resampling Procedure: a - Underlying
Unimodal Distribution; b - Underlying Distribution (solid
line) and Two Truncated Normal Distributions (dashed and
dotted lines).
As we have noted above, simultaneously with adding
new ”artificial” observation to positive class, we
drop randomly observation from negative class.
Therefore, we keep the sample size fixed. That helps
us to avoid increasing computational time and losing
information.
In the procedure, we will use the following criteria:
- Chi-squared test (Pearson goodness-of-fit test ). We
have data set S
n
that is grouped into discrete classes.
Let ϕ denote a vector of observed frequencies of
classes and let ϕ
0
denote the corresponding vector of
expected (specified) frequencies. We then calculate
our test statistic:
T =
r
∑
i=1
ϕ
i
−ϕ
0
i
2
ϕ
i
, (4)
where r is a number of classes. Under the null hypoth-
esis, this statistic is chi-squared distributed, with de-
grees of freedom equal to r −1 − j, where j is a num-
ber of parameters that should be estimated (for para-
metric case). That is, we can test here a null hypoth-
esis that the frequencies of observed outcomes (daily
numbers of road injuries) follow a specified (uniform)
distribution, at some chosen level γ. Unfortunately,
this test can be also unsuitable for samples of consid-
erably large size (> 3000). It cannot be also applied
when the expected frequency of any cell is less than
5 or the total n is less than 50. But in our case this
test is appropriate, so further we apply it as a primary
criterion.
- One-sample Kolmogorov-Smirnov nonparametric
test (KS-test). Let S
n
=
{
Y
1
,Y
2
, ...,Y
n
}
be as before
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
146
our data set, with distribution function F (y). We wish
to test the null hypothesis H
0
: F (y) = F
0
(y) for all y
against the alternative H
1
: F (y) 6= F
0
(y), where F
0
(y)
is a completely specified distribution function (in our
case - function of uniform distribution). Test on H
0
vs
H
1
is determined by Kolmogorov-Smirnov statistic
D
n
= sup
−∞<y<∞
|
F
n
(y) −F
0
(y)
|
, (5)
where F
n
(y) is the empirical distribution function
defined by F
n
(y) =
1
n
∑
n
i=1
I
{
Y
i
< y
}
. That is, the
Kolmogorov-Smirnov test tries to determine if dis-
tribution of our data set differs significantly from
the specified hypothetical distribution (here - the uni-
form hypothetical distribution). The null hypothe-
sis is rejected at level γ if the computed value D
n
is larger than the critical value C
γ
. The critical val-
ues of Kolmogorov-Smirnov test statistic depend on
the sample size. For large samples (≥ 40) one uses
asymptotic critical values, which are strictly decreas-
ing functions of the sample size: for example, the crit-
ical value at the γ = 0.05 level is approximately
1.36
√
n
,
where n is sample size. Obtaining the value D
n
<
C
γ
for considerably large n (> 3000) may dramati-
cally increase computational time. Another problem
is that Kolmogorov-Smirnov test doesn’t work well
with discrete (count) data. This problem could be
solved, for example, by the following way: we can
transform our data to continuous ones by means of
Monte Carlo simulation, and then apply Kolmogorov-
Smirnov test to the empirical distribution function of
continuous simulated data and the specified distribu-
tion F
0
(y).
- As we constrain a uniform distribution, one can
use a value of kurtosis for distribution control. Re-
mind, that kurtosis is the degree of peakedness of a
distribution. Removing observations from the center
to the tails and ”shoulders” of the distribution will de-
crease kurtosis, making the initial leptokurtic distri-
butions more platykurtic. A uniform distribution has
a kurtosis of 1.8. Thus, kurtosis could be used. as a
simple parameter for comparison data set distribution
with uniform ones: if
|
µ(S
n
) −µ
0
|
< ε , (6)
where µ
0
= 1.8, µ(S
n
) is kurtosis of S
n
, and 0 < ε < 1,
we stop resampling procedure.
3.2 Classification Results
We can now see that the C4.5 algorithm improves
its classification performance when we apply it to re-
balanced data sets. In our example, we have chosen
γ = α = 5%. The percentage of correctly classified
instances after resampling procedure have increased
from 18% to 35% for Region 1, from 26% to 37% -
for Region 2 (see below). Our approach also yields
promising results in terms of the alternative perfor-
mance measures.
CLASSIFICATION RESULTS FOR REGION 1:
Correctly Classified Instances 35.0365 %,
Recall = 0.3089, Precision = 0.5783,
G-mean = 0.3734, F-measure = 0.4027.
CLASSIFICATION RESULTS FOR REGION 2:
Correctly Classified Instances 37.5 %,
Recall = 0.3477, Precision = 0.6476,
G-mean = 0.3972, F-measure = 0.4525.
The histograms indicate approximately uniform
distributions after procedure completion, with kurto-
sis magnitudes equal to 1.8643 and 1.7894, respec-
tively.
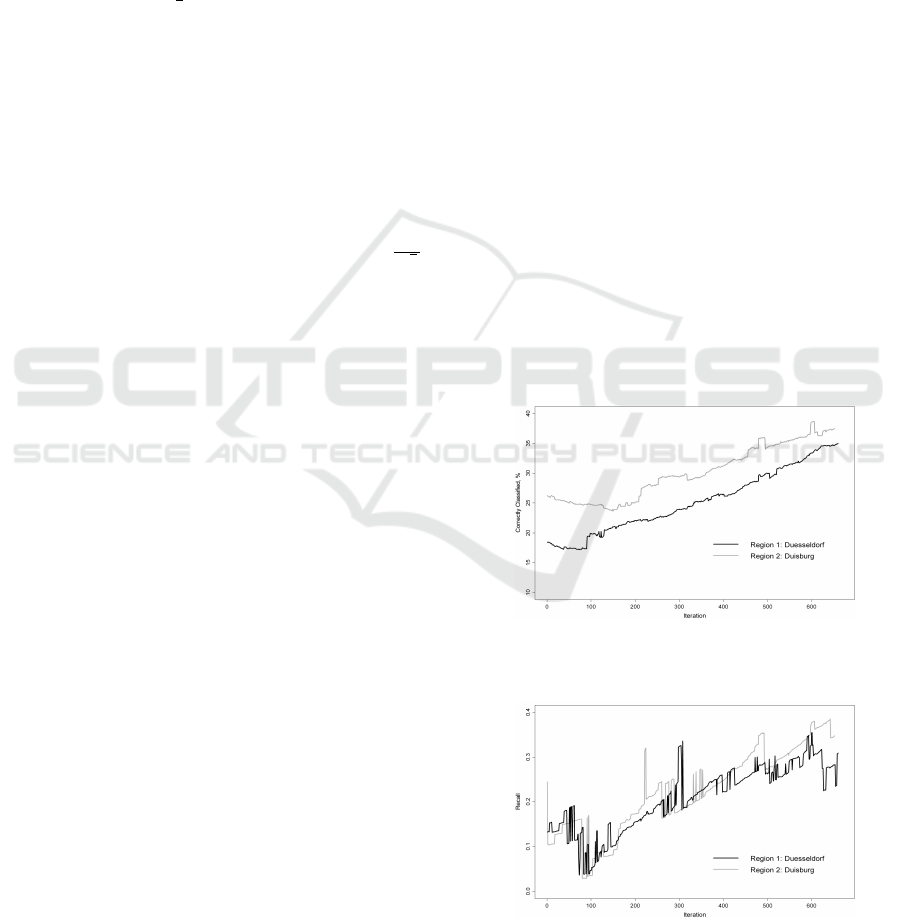
Reporting our experimental results in dynamics,
one can see in Figures 3-5, that the measures those
we are interested in, are increasing (although non-
monotonically) with the iteration number. In each
figure, we plot every classification measure for both
regions: percentage of correctly classified examples
(Figure 3), Recall (Figure 4), Precision (Figure 5) (G-
mean and F-measure plots are not presented here by
lack of space).
Figure 3: Algorithm Performance for Regions: Accuracy,
%.
Figure 4: Algorithm Performance for Regions: Recall.
Note, that Precision lines are lying almost everywhere
above all other lines. This tells us that proportion of
RESAMPLING BASED ON STATISTICAL PROPERTIES OF DATA SETS
147

Figure 5: Algorithm Performance for Regions: Precision.
examples that were classified as elements from posi-
tive classes and those that are actually positive, grows
most rapidly.
4 CONCLUSIONS AND FUTURE
RESEARCH WORK
In this paper, a resampling technique based on statis-
tical properties of data set, was proposed. We have
tested our technique in terms of its accuracy and four
performance measures: Recall, Precision, G-mean
and F-measure. As investigation reveals, C4.5 algo-
rithm applied to resampled data sets produced better
results. But, in spite of the presented promising direc-
tion of rather general resampling techniques, the algo-
rithm has to be yet improved in terms of classification
performance. The effect of its application to various
forms of data sets structure (highly skewed data sets,
multimodal data sets, etc.) should be investigated as
well. The comparison with other resampling methods
also has to be carried out.
The resampling algorithm can be also carried out
on the basis of the likelihood ratio test. The Neyman-
Pearson Lemma implies that likelihood ratio test gives
the best result in fixed size samples.
Further, for the start-up problem we were interested
in, an accurate classification can result in injuries
control boundaries analogous to presented in (Bon-
darenko, 2006a), (Bondarenko, 2006b), (F. Pokropp
and Sever, 2006). The trees obtained by classifica-
tion, can be very large (a lot of nodes and leaves), and
in this since they are less comprehensible for control
boundaries illustration. But we can simplify the ob-
tained classification results by transforming every de-
cision tree into a set of ”if-then” rules (”Traffic In-
juries Rules”), which seem to be easier for under-
standing and interpreting. Using real traffic injuries
data, it is possible to develop realistic model for daily
injuries number prediction, depending on temporal
factors (year, month, day type). Of course, this re-
search direction is open for other practical implica-
tions as well.
REFERENCES
Bondarenko, J. (2006a). Analysis of traffic injuries among
children based on generalized linear model with a la-
tent process in the mean. Discussion Paper in Statis-
tics and Quantitative Economics, Helmut-Schmidt
University Hamburg, (116).
Bondarenko, J. (2006b). Children traffic accidents mod-
els: Analysis and comparison. Discussion Paper
in Statistics and Quantitative Economics, Helmut-
Schmidt University Hamburg, (117).
F. Pokropp, W. Seidel, A. B. M. H. and Sever, K. (2006).
Control charts for the number of children injured in
traffic accidents. In H.-J. Lenz, P.-T. W., editor, Fron-
tiers in Statistical Quality Control, pages 151–171.
Physica, Heidelberg, 5 edition.
G. Cohen, M. Hilario, H. S. S. H. and Geissbuhler, A.
(2005). Learning from imbalanced data in surveil-
lance of nosocomial infection. Artificial Intelligence
in Medicine, 37:7–18.
H. Han, W. W. and Mao, B. (2005). Borderline-smote:
A new over-sampling method in imbalanced data sets
learning. In Proceedings of the International Confer-
ence on Intelligent Computing, pages 878–887.
Hido, S. and Kashima, H. (2008). Roughly balanced bag-
ging for imbalanced data. In Proceedings of the SIAM
International Conference on Data Mining, pages 143–
152.
Kohavi, R. and Provost, F. (1998). Glossary of terms. edi-
torial for the special issue on applications of machine
learning and the knowledge discovery process. Ma-
chine Learning, 30:271–274.
Kubat, M. and Matwin, S. (1997). Adressing the curse of
imbalanced training sets: Onesided selection. In Pro-
ceedings of the 14th International Conference on Ma-
chine Learning, pages 179–186.
N. Chawla, K. W. Bowyer, L. O. H. and Kegelmeyer, W. P.
(2002). Smote: Synthetic minority oversampling tech-
nique. Journal of Artificial Intelligence Research,
16:321–357.
Quinlan, J. (1993). C4.5: Programs for Machine Learning.
Morgan Kaufmann, San Mateo, California.
S. Ertekin, J. H. and Giles, C. L. (2007). Active learning
for class imbalance problem. In Proceedings of the
30th Annual International ACM SIGIR Conference on
Research and Development in Information Retrieval,
pages 823–824.
S. Kotsiantis, D. K. and Pintelas, P. (2006). Handling im-
balanced datasets: a review. GESTS International
Transactions on Computer Science and Engineering,
30:25–36.
V. Garcha, J. S. and Mollineda, R. (2008). On the use of sur-
rounding neighbors for synthetic over-sampling of the
minority class. In Proceedings of the 8th WSEAS In-
ternational Conference on Simulation, Modelling and
Optimization, pages 389–394.
X.-Y. Liu, J. W. and Zhou, Z.-H. (2006). Exploratory un-
dersampling for class-imbalance learning. In Proceed-
ings of the International Conference on Data Mining,
pages 965–969.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
148
