
COLLISION-MODEL BASED MOTION PLANNER FOR
MULTI-AGENTS IN A FACTORY
S. H. Ji, W. H. Ko, K. T. Nam and S. M. Lee
Korea Institute of Industrial Technology, Sa-1-dong, Sangrok-gu, Ansan-si, KyungKi-do, South Korea
Keywords: Collision map, Collision Model, Multi-agents, Mobile-robot motion planning, Priority.
Abstract: It is well known that Mathematical solutions for multi-agent planning problems are very difficult to obtain
due to the complexity of mutual interactions among multi-agents. We propose a practically applicable
solution technique for multi-agent planning problems, which assures a reasonable computation time and a
real world application for more than 3 multi-agents. First, based upon the collision map the collision
features of multi agent is analyzed. The collision map is used for the collision avoidance of two industrial
manipulators based upon the priority. Second, collision model ((M,D) network model) based upon the
studied collision features is suggested in order to express the traveling features of multi agents. Finally, an
interactive way to design the collision-free motion of multi agent on the network model is proposed.
1 INTRODUCTION
Multi-agent motion planning is one of the interesting
and essential research fields in robotics. The demand
for various specialized robots has been increasing
rapidly with the advancement of robot technology.
Multi-agent motion planning has been studied for
the last several decades. Multi-agent motion
planning, however, is still a challenging field of
research, having some technical difficulties in
resolving conflict among agents. The centralized
approaches have been faced with problems such as
the curse of dimensionality, complexity,
computational difficulty, and NP-hard problem
(Canny, 1988; Akella, 2002).
To overcome these problems in the approach, we
proposed the extended collision map method (Ji,
2007). We modified the collision map such that the
method enables N agents to proceed with the
collision-free operation according to the priority by
going on the collision avoidance process one after
another from the highest priority agent.
Yet, in this method, the mutual relation regarding
the collision region among agents was not analyzed.
In this regard, in this paper the mutual relation
regarding the collision region is analyzed, and based
upon the studied collision features, (M,D) network
model which can express the traveling features of
multi agent is shown. (M,D) network model can
express not only the collision features between two
agents but also the complicated mutual interference
among more than three agents. Likewise, the
collision-free operation of multi agent can be
designed and the operating finish time of agents can
be figured by using (M,D) network model.
The remainder of the paper is organized as
follows: Section 2 defines our research and the
detailed approach conceptually. Section 3 presents
the concept of the key technique of this paper –
Collision model. Section 4 provides the way how to
plan collision-free motion of multi-agents based on
the (M,D) network model. Finally, this paper is
concluded in Section 5.
2 PROBLEM STATEMENTS
2.1 Assumptions
To overcome the drawbacks of the centralized
approach, the extended collision map method applies
several concepts as follows:
The intelligent space can provide a central
planner with essential and necessary information for
motion planning and motion monitoring. This
information includes all the agents’ motion status
and all the static and moving obstacles’ positions
(Lee, 2000; Norihiro, 2003).
378
Ji S., Ko W., Nam K. and Lee S.
COLLISION-MODEL BASED MOTION PLANNER FOR MULTI-AGENTS IN A FACTORY.
DOI: 10.5220/0002172703780382
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-674-000-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Global off-line path planner (Central planner)
can give the safe paths to all agents. In this paper,
‘safe path’ is the meaning that no agent will not
crossover any other agent’s starting point or
destination if it keeping on its own safe path.
Therefore there can be intersection points among
agents’ paths.
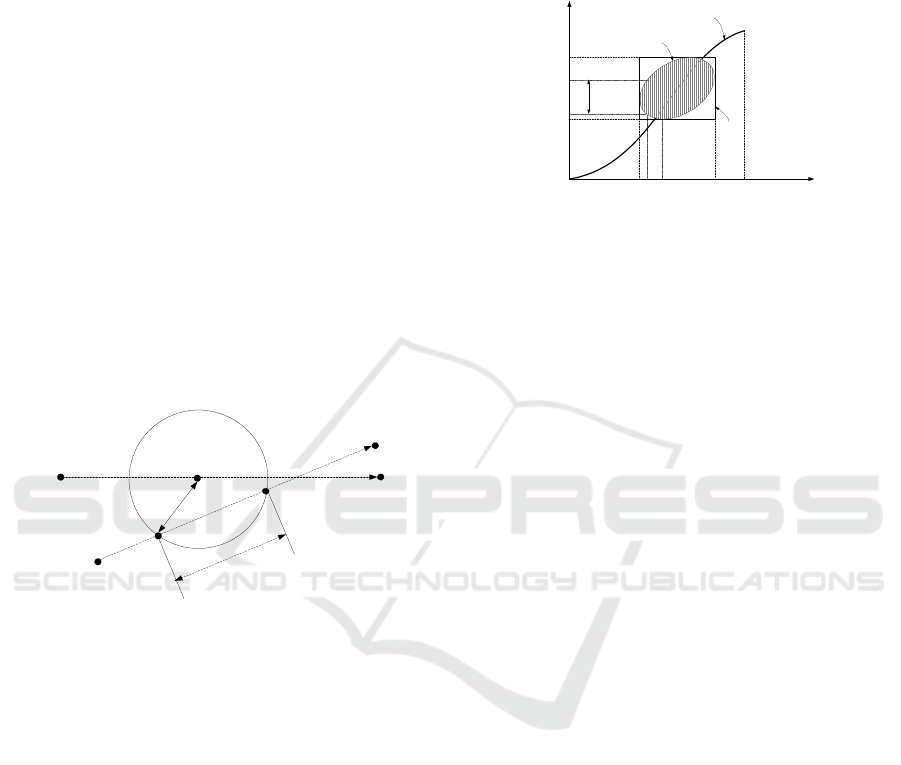
2.2 Collision Map
The concept of the original collision map was
presented in the previous study (Lee, 1987). The
original concept is as follows: An agent with a
higher priority is called 'agent 1', and an agent with a
lower priority is called 'agent 2'. The radii of the two
agents are r
1
and r
2
respectively. Using the obstacle
space scheme, agent 1 can be represented as the
agent with a radius of r
1
+r
2
, and agent 2 can be
considered as a point agent. The original trajectory
of agent 1 is assumed not to be changed. On the
contrary, agent 2 must modify its trajectory if a
collision is anticipated.
Path of agent 2
Path of agent 1
C
o
l
l
i
s
i
o
n
l
e
ng
t
h
(k)
1
λ
)(k
f2
P
)(k
01
P
(k)
1
P
)(k
f1
P
(k)
2
λ
21
r r+
)(k
02
P
Figure 1: Paths of two agents and collision.
If the path of agent 2 meets agent 1 with radius
of r
1
+r
2
, the two agents will collide with each other.
At this instant, the part of agent 2's path that
overlaps with agent 1's path, is called the 'collision
length', which is denoted by the portion between
λ
1
(k) and λ
2
(k) in Fig. 1. These overlapped parts are
examined at every instant of the sampling time k to
construct a 'collision region.' If the TLVSTC
(traveled length versus servo time curve, simply
trajectory) of agent 2 arrives at the region, the two
agents will collide with each other under the original
trajectories. This colliding case is shown in Fig. 2. In
this figure, the vertical axis represents the traveled
length of agent 2 and the horizontal axis represents
the elapsed time.
Because it is difficult to mathematically
represent the boundary line of the collision region,
the concept of ‘collision box’ was introduced. This
concept can be explained in Fig. 2. In this figure, k
s
is the time when agent 1 starts overlapping agent 2’s
path. Also k
e
is the time when agent 1 leaves agent
2’s path. l
s
and l
e
are the minimum and maximum
values of the collision length in the collision region,
respectively.
Length
Time
Collision
region
Collision
length at
time k
TLVSTC
Collision
box
s
k
f
k
e
k
1
k
k
e
l
s
l
f
l
Figure 2: TLVSTC and collision region.
2.3 Extended Collision Map
The extended collision map method considers more
than two agents which have many intersections in
workspace. Thus, the intersection and its
corresponding collision region should be described.
An intersection is denoted by the symbol
jiI
k
ij
>;
(1)
where i and j represent the identifying number of the
agent, and k is the ordering number denoting
intersections along the path of the agent i from the
starting point. The corresponding collision region of
the intersection is expressed as R
k
ij
.
3 COLLISION MODEL
3.1 Collision Characteristics
We assume A1 has an intersection point with A2
which is less important than A1 in Fig.3(a). The
possible position relations between two agents
around the intersection point are as followed; First,
A1 passes through the intersection region before A2
enters the region(Case1). Second, the agents
collide with each other(Case2). Third, A1 reach the
region only after A2 exits the region. The states of
collision box related the agents in Fig.3(a) as shown
in Fig.3(b), where L1 and L2 are the minimum
traveled length and maximum length from start
position to the intersection region along A2’s path.
Time characteristics related to collision region
including T
k
(k=1,2,3,4) in Fig. 3(b) are shown on
Table I, and we define two variables, ‘M’ and ‘D’, in
order to describe the collision states among agents.
COLLISION-MODEL BASED MOTION PLANNER FOR MULTI-AGENTS IN A FACTORY
379
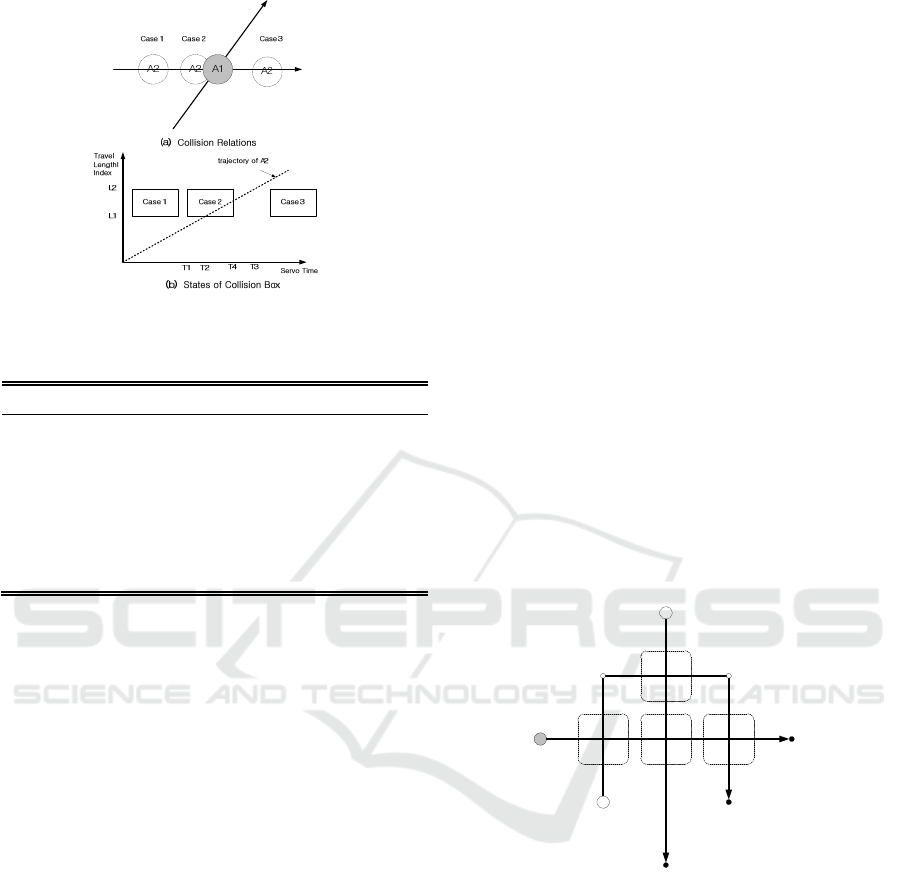
Figure 3: Collision-States of two agents.
Table 1: Characteristics related to collision region.
Variables
Meaning
T
1
Time when A1 reaches the collision region
T
2
Time when A2 reaches the collision region
T
3
Time when A2 exits the collision region
T
4
Time when A1 exits the collision region
T
1d
A2’s delayed start time
T
2d
A2’s delayed start time
M T
3
-T
1
D T
4
-T
2
,
We can predict whether the agents collide with
each other by the variables, M and D, related to the
collision region and define the collision-free
navigation condition of an agent as followed:
Collision-Free Navigation Condition. When an
agent has more than one intersection with other
agents which have higher priorities than the agent, it
should not have any collision region of which
collision characteristics are positive.
3.2 Impact of Time Delay on
Characteristics
When A2, the agent with lower priority, is delayed
in departure by T
2d
without change in path shape nor
velocity profile in order to avoid a collision with A1,
the time variables are changed as followed:
Because the agents keep up their own path shape
and A1 keeps up its velocity profile, neither T
1
nor
T
4
is affected by A2’s delayed departure. T
2
and T
4
which are related to the agents’ path shape and A2’s
TLVSTC are exchanged with T
2
+ T
2d
and T
3
+T
2d
,
because A2’s TLVSTC is shifted to the right by T
2d
in Fig. 3(b). Thus, impact of time delay on collision
characteristics is define as shown in Eq. (2).
M’ = M + T
2d
D’ = D – T
2
d
(2)
where K
0
is a constant which is determined initially
by the agents’ paths shapes and velocity profiles.
According to Eq.(2) M increases and D decreases
when A2 is delayed in departure.
3.3 Collision Model
We present the collision model which express
collision relations and predict possibility of
collisions among the agents. And all of the agent’s
minimum delayed departure time for collision-free
navigation can be extracted from the model. The
elements of collision model are defined in Table 2.
Now, we express the collision model from the
case in Fig. 4 as the network model shown in Fig. 5.
There are three agents (agent 1, agent 2, and agent 3)
with path shapes as shown in Fig.4. We assume that
all of agent’s radii are 5m and there velocities are
1m/sec, 2m/sec, and 1m/sec. We assume also that it
takes no time for them to accelerate, decelerate, or
turn around. And we assume their priority order is 1-
2-3.
agent 1
path of agent 1 : P1 - P4
path of agent 2 : P2 - P5
path of agent 3 : P3 - P6 - P7 - P8
I
31
1
A
1
A
3
A
2
agent 2
agent 3
P
1
(0,50)
P
3
(25,25)
P
4
(100,50)
P
2
(50,100)
P
5
(50,0)
P
7
(75,75)P
6
(25,75)
P
8
(75,25)
I
21
1
I
31
2
I
32
1
scale : ( m, m )
Figure 4: Three agents with intersection points.
The collision network model is as followed: V =
{1,2,3}, P=(1,2,3), E={(2,1,1), (3,1,1), (3,1,2),
(3,2,1)}. L and T are shown in Fig. 5.
When an agent(A
i
) is delayed by T
i
d
, the
collision model is changed related the agent node.
For inlet links from the higher priority agents, M’s
increase and D’s decrease by delayed departure
time(T
i
d
). In the other, for outlet links to lower
priority agents, M’s decrease and D’s increase by the
same amount.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
380
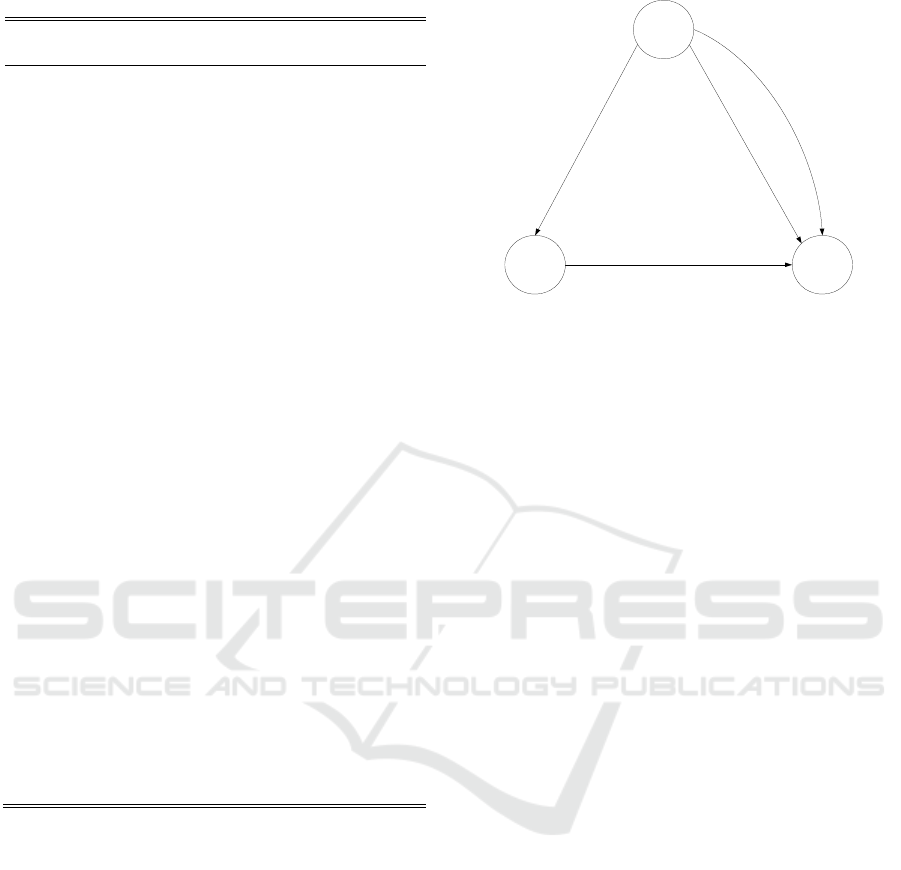
Table 2: Elements of collision model.
Symbols
Meaning
V Node space(V) = { 1, …, N}.
This is a set of agent identified numbers.
E
Link space(E) = { (i, j, k) ∈ V
2
x N | i
∈ P
+
j
, k=1,…, k(i,j) }.
This is a set of collision regions among
agents.
P
+
j
is explained in priority order space, and
the links go from the agent with higher
priority to the other agent.
k(i,j) is the number of collision regions
between agent j and agent i . So some agent
can have more than two links with other agent
if they have several collision regions
C
Link relation space(C) = { (M
ij
k
, D
ij
k
) ∈ R
2
| (i,j,k) ∈ E }.
This is a set of collision characteristics, M and
D in the Table I.
T
Node navigation characteristic space(T) =
{ (T
i
delayed
, T
i
traveled
) ∈ R
2
}.
This is a set of agents’ delayed departure
times and pure traveled time from the start
point to the destination.
P
Priority order space(P) = {(N
1
, …, N
N
) ∈
V
N
| N
i
is the identified number of the agent
with the i
th
highest priory}
This is a set of agent orders in which each
agents are placed from an agent with the
highest priority to an agent with the lowest
priority.
P
+
j
is the set of agents which have higher
priorities than agent j in P and P
-
j
is the set of
agents which have lower priorities than agent
j in P, the space of priority order space
4 COLLISION MODEL BASED
MULTI-AGENT MOTION
PLANNER
As a result of the time delay, the safe inlet link may
be dangerous. So in this paper we propose an
iterative approach to find the minimum delayed
departure time for collision avoidance as followed:
Collision-Free Motion Planner for an Agent
on Collision Model
Step1. We extract the links on which the agent is
expected to collide with higher priority agents(Inlet
Links) by use of collision characteristics.
A1
A2 A3
M
21
1
, D
21
1
M
31
1
, D
31
1
M
31
2
, D
31
2
M
32
1
, D
32
1
{T
1
delayed
, T
1
travelded
}
{T
2
delayed
, T
2
travelded
}{T
3
delayed
, T
3
travelded
}
Figure 5: Collision model for three agents in Figure4.
Step2. We define an instantaneous delayed
departure time (T
i
d
) as the maximum of the Ds’ in
the selected links.
T
i
d
= max ( {D
ij
k
| j ∈ P+(i), (i, j, k)∈E
s.t. M
i
j
k
> 0 and D
i
j
k
> 0})
(3)
Step3. We modify node variables, link parameters
by T
i
d
.
Step4. If there is no inlet links to the agent which is
dangerous, the agent can go to its destination safely.
Otherwise, we execute above actions from the first
stage.
Collision-Free Motion Planner for
Multi-Agents on Collision Model
First, we select an agent from the priority order
space (P) by use of priority index.
Second, if the agent has the highest priority, go
to first stage. Otherwise, we apply the collision-free
motion planner on collision model to the agents so
that the agent can navigate safely.
Third, if the selected agent has the lowest
priority, the all of the agents can navigate safely, and
finish up this algorithm. Otherwise, increase priority
index by 1 and go to first stage.
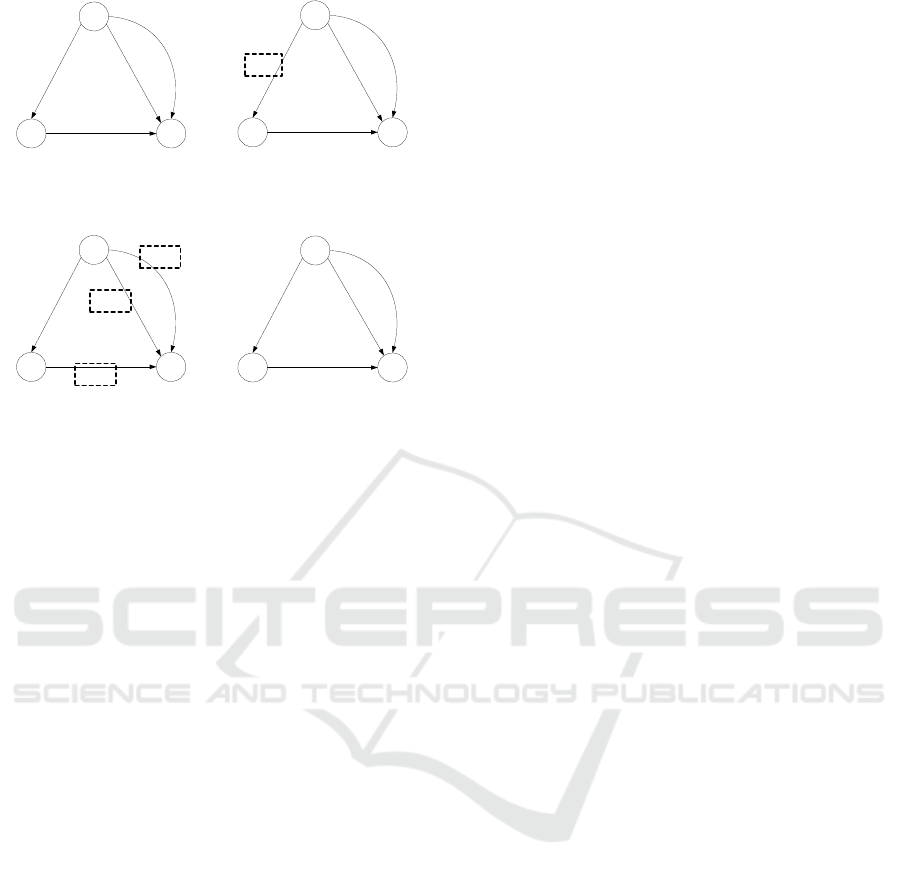
The procedure of this algorithm for the three
agents in Fig. 4 is shown in Fig. 6. Because the all
agents’ links is in a safe state in Fig. 6(d), we can
predict that the agents can navigate without collision
among them.
COLLISION-MODEL BASED MOTION PLANNER FOR MULTI-AGENTS IN A FACTORY
381
REFERENCES
A1
A2 A3
{40,0}
{30, 0}
{30, 0}
{35, -5}
{0, 100}
{20,100} {27.5, 75}
A1
A2 A3
{40,0}
{2.5, 27.5}
{2.5, 27.5}
{7.5, 22.5}
{0, 100}
{20,100} {0, 75}
A1
A2 A3
{20 , 20}
{2.5, 27.5}
{2.5, 27.5}
{27.5, 2.5}
{0, 100}
{0, 100} {0, 75}
A1
A2 A3
{20 , 20}
{2.5, 27.5}
{2.5, 27.5}
{27.5, 2.5}
{0, 100}
{0, 100} {0, 75}
(a)
(b)
(c)
(d)
J.C.Latombe, 1991. Robot Motion Planning, Kluwer
academic publishers.
M.M.Quottrup, T.Bak, R.Izadi-Zamanabadi, 2004. Multi-
Robot Planning : A Timed Automata Approach, Proc.
of IEEE Int. Conf. on Robotics and Automation.
J.F.Canny, 1988. The Complexity of Robot Motion
Planning, MIT Press.
K.Azarm and G.Schmit, 1997. Conflict-free Motion of
Multiple Mobile Robots Based on Decentralized
Motion Planning and Negotiation, Proc. of IEEE Int.
Conf. on Robotics and Automation.
B.H.Lee, C.S.G.Lee, 1987. Collision-Free Motion
Planning of Two Robots, IEEE Transactions on
Systems, Main, and Cybernetics, vol. 17, no 1, pp. 21-
31.
K.S.Barber, T.H.Liu, and S.Ramaswamy, 2001. Conflict
Detection During Plan Integration for Multi-Agent
Systems, IEEE Transactions on Systems, Man, and
Cybernetics, vol. 31, no. 4, pp. 616-627.
Figure 6: Procedure of collision-free motion planner on
collision model for the agents in Figure 4.
J.H.Lee and H.Hashimoto, 2000. Intelligent space, Proc.
of IEEE/RSJ Int. Conf. on Intelligent Robots and
Systems, vol. 2, pp. 1358-1363.
S.H.Ji, J.S.Choi, and B.H.Lee, 2007. A Computational
Interactive Approach to Multi-agent Motion Planning,
International Journal of Control, Automation, and
Systems, vol. 5, no. 3, pp. 295-306.
5 CONCLUSIONS
In this paper, we present a systematic approach to
the multi-agents motion planning problem. In this
regard, in this paper the mutual relation regarding
the collision region is analyzed, and based upon the
studied collision features, (M,D) network model,
collision model, which can express the traveling
features of multi agent is shown. Collision model
can express not only the collision features between
two agents but also the complicated mutual
interference among more than three agents. Likewise,
the collision-free operation of multi agent can be
designed and the operating finish time of agents can
be figured by using collision network model.
S. Akella and S. Hutchinson, 2002. Coordinating the
Motions of Multiple Robots with Specified
Trajectories, Proc. Of IEEE Int. Conf. on Robotics
and Automation.
H.Norihiro, K.Kiyoshi, M.Kehji and S.Yasuyuki, 2003.
Collaborative Capturing of Experiences with
Ubiquitous Sensors and Communication Robots, Proc.
of IEEE Int. Conf. on Robotics & Automation, pp.
4166-4171.
Because our method is fast and scalable,
complete, so our method can be used practically to
multi-AGVs in factories, airports, and big buildings
where there are sensor networks obtaining global
position information.
ACKNOWLEDGEMENTS
This work was supported by the Next-Generation
New Technology Development Programs from the
Ministry of Knowledge Economy(MKE).
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
382
