
THE MULTISTART DROP-ADD-SWAP HEURISTIC FOR THE
UNCAPACITATED FACILITY LOCATION PROBLEM
Lin-Yu Tseng
a,b
and Chih-Sheng Wu
b
a
Institute of Networking and Multimedia, National Chung Hsing University, 250 Kuo Kuang Road, Taichung, Taiwan
b
Department of Computer Science and Engineering, National Chung Hsing University
250 Kuo Kuang Road, Taichung, Taiwan
Keywords: Facility location, Multistart MDAS heuristic, Heuristics, Optimization, Local search.
Abstract: The uncapacitated facility location problem aims to select a subset of facilities to open, so that the demands
of a given set of customers are satisfied at the minimum cost. In this study, we present a novel multistart
Drop-Add-Swap heuristic for this problem. The proposed heuristic is multiple applications of the Drop-
Add-Swap heuristic with randomly generated initial solutions. And the proposed Drop-Add-Swap heuristic
begins its search with an initial solution, then iteratively applies the Drop operation, the Add operation or
the Swap operation to the solution to search for a better one. Cost updating rather than recomputing is
utilized, so the proposed heuristic is time efficient. With extensive experiments on most benchmarks in the
literature, the proposed heuristic has been shown competitive to the state-of-the-art heuristics and
metaheuristics.
1 INTRODUCTION
The success of some businesses heavily depends on
how they locate their facilities. Therefore, location
problems have been widely studied because of their
importance, both in theory and in practice. Location
problems can be classified into four categories: p-
center problems, p-median problems, uncapacitated
facility location problems, and capacitated facility
location problems. In this study, we consider the
uncapacitated facility location problem (UFLP). A
UFLP can be described as follows.
Suppose we have a set of m customers U={1, 2,
…, m} and a set of n candidate facility sites F={1, 2,
…, n}. There is no limit to the number of customers
a facility can serve. c
ij
is used to represent the cost of
serving customer i from facility j and f
j
is used to
represent the cost of opening facility j. Furthermore,
c
ij
for i=1, 2, … ,m and j=1, 2, …, n and f
j
for i=1, 2,
…, n are assumed to be greater than zero. Then a
UFLP is defined as (Cornuéjols et.al., 1990):
Minimize
∑∑∑
===
+
n
j
jj
m
i
n
j
ijij
pfxc
111
Subject to
mix
n
j
ij
1,...,for 1
1
==
∑
=
(1)
,...,nj,...,mipx
jij
1 and 1for ==≤
(2)
njm ix
ij
1,..., and 1,...,for }1 ,0{ =
=
∈
(3)
.1,...,for 1} {0, njp
j
=
∈
(4)
In constraint (3), x
ij
= 0 indicates that facility j
does not serve customer i and x
ij
= 1 indicates that
facility j serves customer i. In constraint (4), p
j
= 0
or 1 indicates that facility j is closed or open
respectively. Constraint (1) states that each customer
must be and must only be served by one facility.
Constraint (2) states that a facility can serve
customers only if it is open. The objective of the
UFLP is to minimize the sum of the customer
serving costs and the facility opening costs.
The UFLP is also called the uncapacitated
warehouse location problem or the simple plant
location problem in the literature. Since the UFLP is
an NP-hard problem (Cornuéjols et.al., 1990), exact
algorithms ((Körkel, 1989) is an example) in general
solve only small instances. For larger instances,
approximation algorithms, heuristics, and
metaheuristics have been proposed in the literature
to solve this problem. Hoefer (2002) presents an
experimental comparison of five state-of-the-art
heuristics: JMS, an approximation algorithm (Jain
21
Tseng L. and Wu C.
THE MULTISTART DROP-ADD-SWAP HEURISTIC FOR THE UNCAPACITATED FACILITY LOCATION PROBLEM.
DOI: 10.5220/0002173100210028
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-8111-99-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

et.al., 2002); MYZ, also an approximation algorithm
(Mahdian et.al., 2002); swap-based local search
(Arya et.al., 2001); tabu search (Michel andVan
Hentenryck, 2003); and the volume algorithm
(Barahona and Chudak, 1999). Hoefer concluded
that based on experimental evidence, tabu search
achieves best solution quality in a reasonable
amount of time and is therefore the method of choice
for practitioners. Although approximation
algorithms are more interesting in theory, heuristics
and metaheuristics often outperform them in
practice. Therefore, developing heuristics or
metaheuristics for the UFLP has attracted more
attention from researchers.
(Kuehn and Hamburger, 1963) presented the first
heuristic that consists of two phases. In the first
phase, the ADD method is applied that starts with all
facilities closed and keeps adding the facility that
results in the maximum decrease in the total cost.
The first phase ends when adding any more facility
will not reduce the total cost. In the second phase,
the swap method is applied in which an open facility
and a closed facility is interchanged as long as such
an interchange reduces the total cost. Another
greedy heuristic called the DROP method was also
proposed by researchers (Nemhauser et.al., 1978).
The DROP method starts with all facilities open,
keeps closing the facility that results in the
maximum decrease in the total cost, and stops if
closing any more facility will not reduce the total
cost. (Erlenkotter, 1978) proposed a dual approach
for the UFLP. It is an exact algorithm but it can also
be used as a heuristic.
In recent years, some metaheuristics were
proposed for the UFLP. In general, metaheuristic
methods spend more computation time and obtain
better solution quality than heuristic methods do.
These metaheuristics include genetic algorithms
(Kratica et.al. 2001), tabu search (Ghosh,
2003)(Michel and Van Hentenryck, 2003)(Sun,
2006), and path relinking (Resende and Werneck,
2006). In particular, the most recent hybrid
multistart heuristic proposed by Resende and
Werneck and the tabu search proposed by Sun had
made significant improvements in solving the
benchmark instances. The hybrid multistart heuristic
(Resende and Werneck, 2006) builds an elite set and
applies path-relinking repeatedly to search for good
solutions. Sun’s tabu search (Sun, 2006) divides its
search process into the short term memory process,
the medium term memory process and the long term
memory process. A move in this tabu search is to
open or to close a facility. Sun also designed an
efficient method to update, rather than re-compute,
the net cost change of a move. In spite of all these
improvements there is still room for making
progress. In this paper, we present the Multistart
Drop-Add-Swap heuristic (MDAS) for the UFLP.
The MDAS starts with a set of randomly
generated initial solutions. A solution is represented
by a sequence of n bits. The value of the ith bit is 0
(1) if the ith facility is close (open). For each
solution, the following process is iterated a
predetermined number of times. The MDAS firstly
keeps closing the facility that results in the
maximum decrease of the total cost until no facility
can be closed to reduce the total cost. Then, the
MDAS tries to find either opening a facility or
interchanging an open facility with a closed facility
will result in the maximum reduction of the total
cost, and it will then do the corresponding opening
or interchanging.
The rest of the paper is organized as follows. In
Section 2, the proposed MDAS is described.
Experimental results and some discussions are listed
in Section 3. Finally, conclusions are given in
Section 4.
2 MDAS HEURISTIC
In this section, we introduce the proposed Multistart
Drop-Add-Swap heuristic (MDAS) for the UFLP.
The Add method and the Swap method had been
used to solve the UFLP by (Kuehn and Hamburger,
1963). Their heuristic consists of an Add method
phase followed by a Swap method phase. The Add
method phase starts with all facilities closed and
keeps opening the facility that results in the
maximum reduction in the total cost, and stops if
opening any more facility will no longer reduce the
total cost. In the Swap method phase, an open
facility and a closed facility are interchanged as long
as such an interchange decreases the total cost. The
Drop method had also been proposed to solve the
UFLP in previous studies. (Cornuéjols et.al., 1977)
presented a heuristic that consists of a single phase
of the Drop method. The Drop method starts with all
facilities open and keeps closing the facility that
results in the maximum reduction in the total cost,
and stops if closing any more facility will no longer
decreases the total cost. Unlike the above mentioned
heuristics, the proposed DAS heuristic contains
iterations of Drop or Add or Swap operation with
one operation in each iteration. In each iteration, the
Drop operation is first examined and if applying the
Drop operation can reduce the total cost, it is
applied; Otherwise, the Add operation or the Swap
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
22
operation whichever can reduce the total cost most,
is applied. Moreover, multistart is utilized to
enhance the global search capability of the proposed
DAS heuristic because in multistart DAS (MDAS),
search will begin with initial solutions distributed
over the whole solution space.
(Sun, 2006) designed an efficient method to
calculate the net cost change of an Add operation
and a Drop operation, as denoted by equations (5)
and (6) respectively.
(
)
j
Xi
ij
id
j
fccO
j
i
−−=Δ
∑
∈
+
1
(5)
(
)
∑
∈
−
−−=Δ
j
i
Yi
ij
id
jj
ccfO
2
(6)
For a solution s, we define two sets of facilities:
S
c
represents the set of all closed facilities and S
o
represents the set of all open facilities. Furthermore,
for each customer i, let
1
i
d
be the open facility (i.e.
oi
Sd ∈
1
) that is closest to i , and let
2
i
d
be the open
facility (i.e.
oi
Sd ∈
2
) that is second closest to i. X
j
denotes the set of customers that will be supplied by
facility j when facility j is changed from closed to
open. Y
j
denotes the set of customers that were
originally supplied by facility j when facility j is
changed from open to closed. With the above
definitions, equation (5) represents the net cost
reduction of opening facility j and equation (6)
represents the net cost reduction of closing facility j.
Obviously, if
j
O
+
Δ
(
j
O
−
Δ
) is positive, opening
facility j (closing facility j) will reduce the total cost.
Since Sun utilized only the Add operation and the
Drop operation, and we use three operations: Add,
Drop and Swap, we further design the following
three equations for net cost reduction calculation of
a Swap operation (Open facility j and close facility
k).
kjjk
fOZ +Δ=
+
(7)
{
}
jk
idid
ij
id
ij
XYiccccQ
iii
−∈
−
−= , , max
211
(8)
∑
−∈
+=
jk
XYi
ijjkjk
QZZ
(9)
Equation (7) denotes the cost reduction produced
by opening facility j and the elimination of the
opening cost of facility k because k will be closed.
Equation (8) represents the cost reduction produced
by the reallocation of the customers originally
supplied by facility k. Note that those customers
originally supplied by facility k and will now be
supplied by the newly opened facility j have already
been considered in equation (7). Finally, the net cost
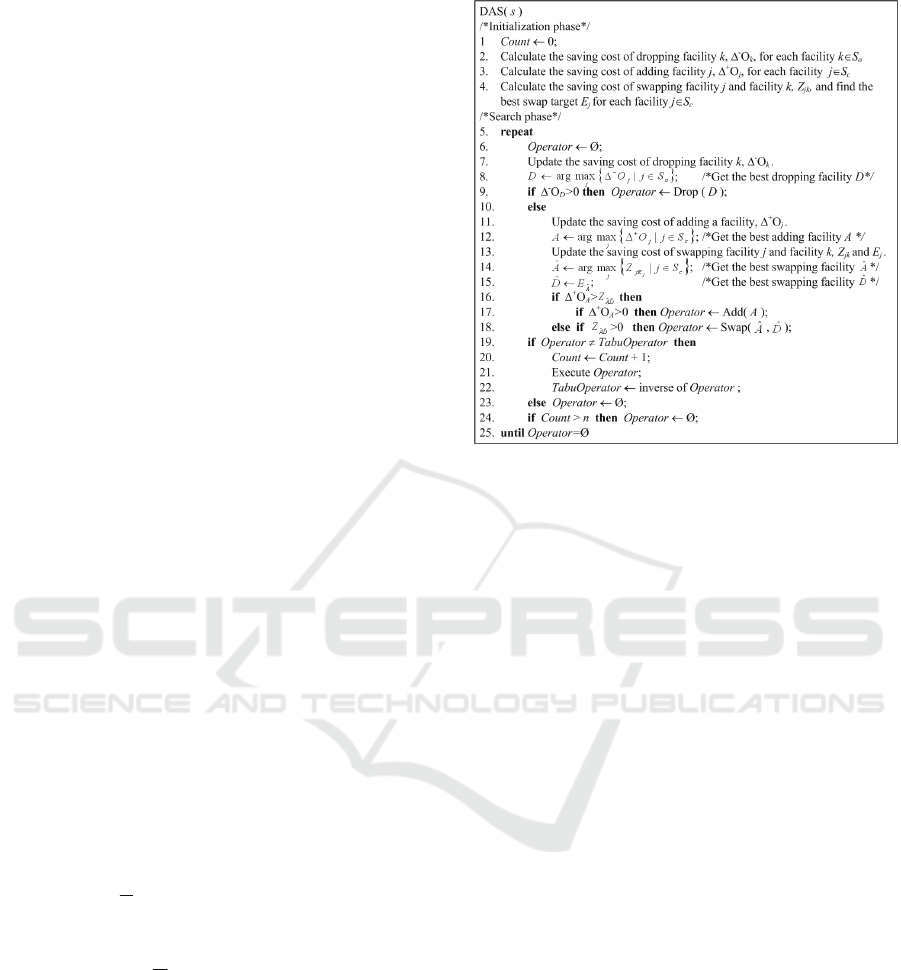
Figure 1: The DAS heuristic.
reduction of Swap(j, k), that is, opening j and closing
k, is denoted by equation (9).
The pseudo code for the Drop-Add-Swap
heuristic (DAS) is shown in Figure 1. In the pseudo
code, Drop(D) denotes closing facility D, Add(A)
denotes opening facility A, and Swap(A, D) denotes
opening facility A and closing facility D
simultaneously. As for the Multistart Drop-Add-
Swap heuristic (MDAS), it will randomly generate a
set of initial solutions first, and then it will apply the
DAS heuristic to each initial solution to search for
the optimum or near-optimal solution.
We now explain the DAS heuristic depicted in
Figure 1. Given a solution s, for each open facility k,
the saving cost of closing facility k will be
calculated; for each closed facility j, the saving cost
of opening facility j will be calculated; for each
closed facility j, the saving cost of opening facility j
and closing its best swapping target E
j
will also be
calculated (lines 2-4). After the initialization phase,
begins the search phase. The search phase contains
at most n iterations and in each iteration, at most one
of the three operations (Drop, Add and Swap) will
be applied. The algorithm terminates if the number
of iterations is greater than n or the chosen operation
is tabued or none of the three operations can reduce
the total cost. In each iteration, the Drop operation is
considered first. If the Drop operation can reduce the
total cost, the Drop operation that reduces cost most
will be applied (lines 7-9). Otherwise, the Add
operation and the Swap operation will be considered
simultaneously. Whichever of the Add operation and
the Swap operation can reduce the total cost most
THE MULTISTART DROP-ADD-SWAP HEURISTIC FOR THE UNCAPACITATED FACILITY LOCATION
PROBLEM
23

will be applied (lines 11-18). The inverse operation
of the applied operation will be tabued in the next
iteration (line 22). When applying any of Drop,
Add or Swap operation, from equations (5)-(9), it is
noted that only related information needs to be
updated rather than all information needs to be
recomputed. Therefore, the calculation of the net
cost change of an operation is very time efficient.
Moreover, by properly combining Drop, Add and
Swap operations, the MDAS heuristic is very
effective in solving the UFLP.
3 EXPERIMENTAL RESULTS
AND DISCUSSIONS
Extensive experiments had been conducted to
evaluate the performance of the proposed MDAS
heuristic. A personal computer with Intel Core 2
Duo 2.33 GHz CPU was used as the platform to run
the program. Although there were two processors,
only one processor was used. The program was
implemented using C++. In this section,
experimental results are given and some discussions
are made.
3.1 Benchmarks
Most benchmarks collected in the UflLib (Hoefer,
2002) website had been utilized to test the
performance of the MDAS heuristic. These
benchmarks are listed as follows.
ORLIB: This benchmark was proposed by (Beasley,
1993) and posted in OR-Library. It consists of 15
problems that are divided into four classes.
M*: These problems were presented by (Kratica et
al., 2001). The benchmark contains six sets with
problem size 100, 200, 300, 500, 1000 and 2000
respectively. Each set has five problems.
GR: The benchmark was proposed by (Galvao and
Raggi, 1989). It consists of five sets with problem
size 50, 70, 100, 150 and 200 respectively. Each set
contains ten problems.
BK: This benchmark, presented by (Bilde and
Krarup, 1977), contains 220 problems with size from
30×30 to 100×100. The distances between customers
and facilities are drawn uniformly from [0, 1000].
FPP: This benchmark was artificially generated to
make the problems harder to be solved. It was
proposed by (Kochetov and Ivanenko, 2003) at the
5th Metaheuristics International Conference in 2003.
The benchmark contains 40 problems and these
problems are classified into two classes: FPP11
(with m = 133 and n = 11) and FPP17 (with m = 307
and n = 17).
GAP: This benchmark was also proposed by
(Kochetov and Ivanenko, 2003) at the 5th
Metaheuristics International Conference. It consists
of three classes: GAPA, GAPB and GAPC. Each
class contains 30 problems. Since these problems
have larger duality gaps, they are more difficult to
be solved by the dual-base method.
GHOSH: (Ghosh, 2003) presented this benchmark
in 2003. The benchmark contains 90 problems.
These problems are divided into two classes:
symmetric and asymmetric. Each class is further
divided into three sets with problem size 250, 500
and 750 respectively. The optimal solutions of some
of these problems are still unknown.
MED: Originally, this benchmark was proposed by
(Ahn et al., 1998) as a benchmark for the p-median
problem. In 1999, (Barahona and Chudak, 1999)
modified it to act as a benchmark for the UFLP. This
benchmark consists of 18 problems with size 500,
1000, 1500, 2000, 2500 and 3000 respectively. For
each size, there are three problems with the opening
costs of facilities being set to
10n
,
100n
and
1000n
, respectively.
3.2 Performance comparison of MDAS
Heuristic and DROP Method
The comparison of performance of the DROP
method, the DAS heuristic and the MDAS heuristic
is shown in Table 1. The first column of Table 1
represents the problem name, the second column
represents the size of the problem, where m is the
number of customers and n is the number of
facilities. The third column lists the costs of the
optimal solutions. The fourth and the fifth column
list the deviation from the optimal solution of the
solution found by the DROP method and the DAS
heuristic, respectively, with the initial solution in
which all facilities were open.
The sixth column represents the average deviation
(from the optimal solutions) of the solutions found
by applying the MDAS heuristic ten times. In each
time, ten randomly generated solutions were used as
the initial solutions. The seventh column shows the
number of times by which the optimal solution was
found by the MDAS heuristic. Finally, the last
column denotes the average CPU time used by the
MDAS heuristic over ten times.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
24
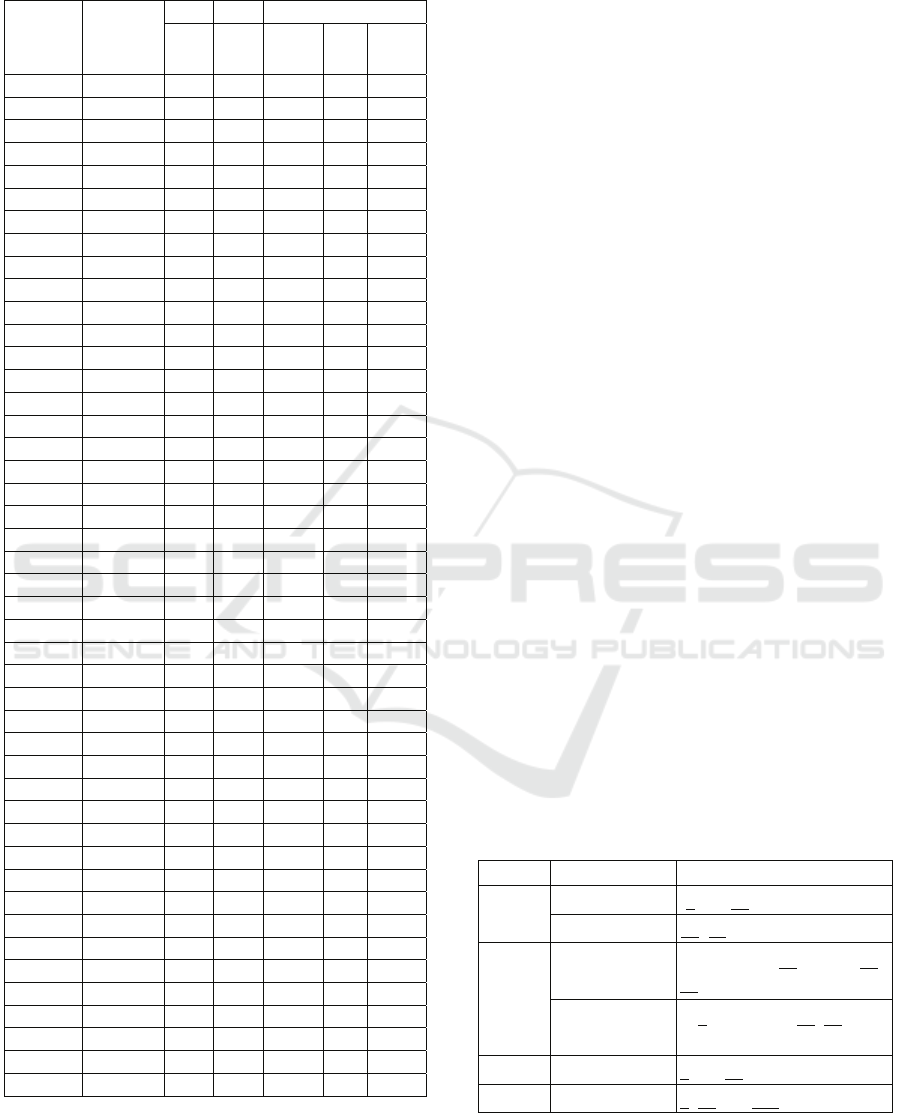
Table 1: Performance comparison of the DROP method,
the DAS heuristic and the multistart DAS heuristic.
Problem OPT
Dro
p
DAS MDAS
Dev Dev
AVG
Dev
Hit
AVG
Time
Ca
p
71 932615.75 0.00 0.00 0.00 10 0.000
Ca
p
72 977799.40 0.00 0.00 0.00 10 0.000
Ca
p
73 1010641.4 0.00 0.00 0.00 10 0.000
Ca
p
74 1034976.9 0.26 0.00 0.00 10 0.000
Ca
p
101 796648.44 0.00 0.00 0.00 10 0.000
Ca
p
102 854704.20 0.09 0.00 0.00 10 0.000
Ca
p
103 893782.11 0.00 0.00 0.00 10 0.000
Ca
p
104 928941.75 0.61 0.00 0.00 10 0.000
Ca
p
131 793439.56 0.00 0.00 0.00 10 0.000
Ca
p
132 851495.32 0.09 0.00 0.00 10 0.000
Ca
p
133 893076.71 0.08 0.08 0.00 10 0.000
Ca
p
134 928941.75 0.61 0.00 0.00 10 0.000
Ca
p
A 17156454. 6.95 0.00 0.00 10 0.084
Ca
p
B 12979071. 1.04 0.00 0.00 10 0.100
Ca
p
C 11505594. 1.24 0.26 0.00 10 0.109
MO1 1156.91 0.53 0.00 0.00 10 0.09
MO2 1227.67 0.00 0.00 0.00 10 0.08
MO3 1286.37 0.94 0.14 0.00 10 0.09
MO4 1177.88 0.16 0.00 0.00 10 0.09
MO5 1147.60 0.00 0.00 0.00 10 0.08
MP1 2460.10 0.00 0.00 0.00 10 0.041
MP2 2419.32 0.00 0.00 0.00 10 0.042
MP3 2498.15 0.00 0.00 0.00 10 0.042
MP4 2633.56 0.45 0.00 0.00 10 0.044
MP5 2290.16 0.00 0.00 0.00 10 0.044
M
Q
1 3591.27 0.00 0.00 0.00 10 0.109
M
Q
2 3543.66 0.04 0.00 0.00 10 0.109
M
Q
3 3476.81 0.85 0.00 0.00 10 0.120
M
Q
4 3742.47 0.00 0.00 0.00 10 0.111
M
Q
5 3751.33 0.00 0.00 0.00 10 0.113
MR1 2349.86 0.00 0.00 0.00 10 0.362
MR2 2344.76 0.00 0.00 0.00 10 0.414
MR3 2183.24 0.00 0.00 0.00 10 0.400
MR4 2433.11 0.00 0.00 0.00 10 0.377
MR5 2344.35 0.00 0.00 0.00 10 0.372
MS1 4378.63 0.00 0.00 0.00 10 2.489
MS2 4658.35 0.05 0.00 0.00 10 2.586
MS3 4659.16 0.67 0.00 0.00 10 2.858
MS4 4536.00 0.00 0.00 0.00 10 2.427
MS5 4888.91 0.00 0.00 0.00 10 2.172
MT1 9176.51 0.00 0.00 0.00 10 14.986
MT2 9618.85 0.00 0.00 0.00 10 13.878
MT3 8781.11 0.00 0.00 0.00 10 14.654
MT4 9225.49 0.00 0.00 0.00 10 14.855
MT5 9540.67 0.00 0.00 0.00 10 13.775
From Table 1, it is noted that there are 17
problems on which the DROP method cannot find
optimal solutions, but there are only 3 problems on
which the DAS heuristic cannot find optimal
solutions. Hence, the DAS heuristic is superior to
the DROP method. Furthermore, when ten randomly
generated solutions were used as the initial solutions
instead of using only the solution with all facilities
opened, the MDAS heuristic could find optimal
solutions for all these 45 problems and for all ten
times of experiments.
Therefore, the MDAS heuristic enhances the
global search ability of the DAS heuristic and
improves the performance significantly. By
examining the solutions of the seventeen problems
on which the DROP method could not find optimal
solutions, some of the solutions were very close to
the optimal solutions, but the optimal solutions
could not be reached from these solutions by
applying the Drop operation. The three problems on
which the DAS heuristic could not find optimal
solutions had a similar situation. The solutions found
by the DAS heuristic for these three problems and
the optimal solutions of these three problems are
listed in Table 2. It is noted that two swap operations
(Swap(6, 11) and Swap(25, 15)) executed
simultaneously are needed to transform the solution
found by the DAS heuristic to the optimal solution
for Cap133. Similarly, more than two operations
executed simultaneously are needed to transform the
solutions found by the DAS heuristic to the optimal
solutions for the other two problems. But when the
DAS heuristic started with multiple randomly
generated initial solutions, though still being
restricted to executed only one operation in each
iteration, the multi-start DAS (MDAS) could find all
optimal solutions of all these forty-five problems as
shown in Table 1.
Table 2: The optimal solutions and the solutions found by
the DAS heuristic (all open).
Instance Source Solution
Cap133
OPT 6
, 23, 25, 27, 34, 45, 46, 49
DAS(All Open) 11, 15, 23, 27, 34, 45, 46, 49
Capc
OPT
6, 14, 24, 35, 53, 70, 79, 81,
89
DAS(All Open)
6, 9
, 14, 24, 35, 48, 66, 70,
79
MO3 OPT 6, 39, 48
DAS(All Open) 7, 38, 39, 100
THE MULTISTART DROP-ADD-SWAP HEURISTIC FOR THE UNCAPACITATED FACILITY LOCATION
PROBLEM
25
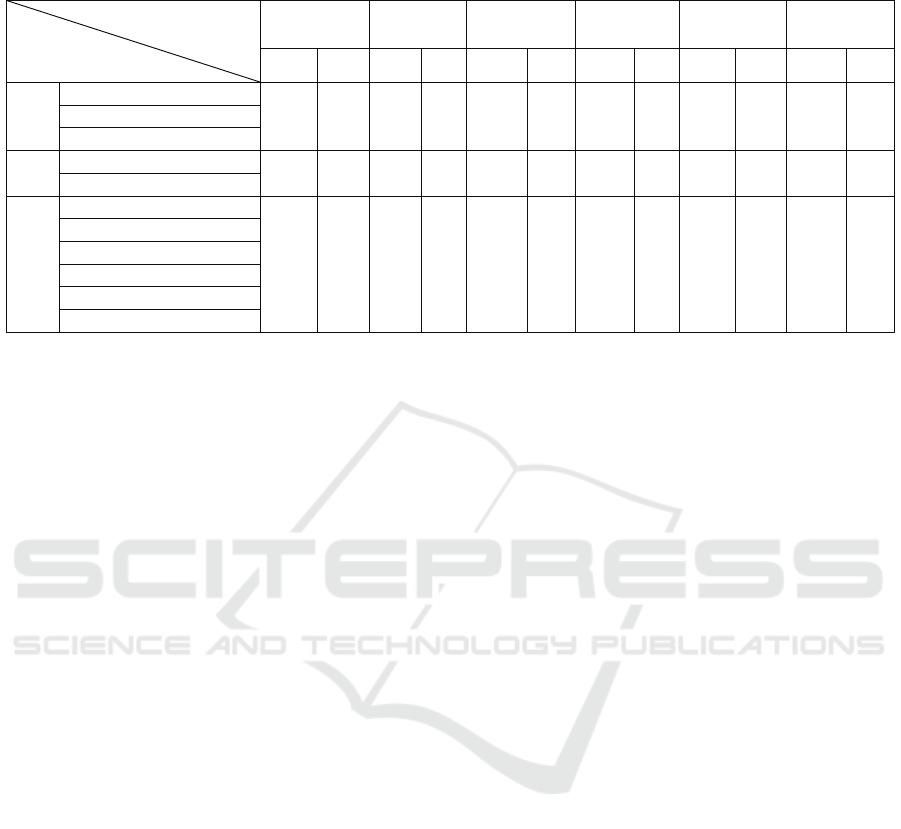
Table 3: Performance comparison of the MDAS heuristic with two other methods on six benchmarks.
3.3 Performance Comparison of
MDAS and the Other Two Methods
In this subsection, the performance of the MDAS is
compared with those of the hybrid multistart
heuristic and the simple tabu search on six
benchmarks. This comparison is depicted in Table 3.
The performance data of the hybrid multistart
heuristic and the simple tabu search were taken from
(Resende and Werneck, 2006). The six benchmarks
considered are ORLIB, M*, GR, BK, FPP and GAP.
The computer used by the MDAS was a personal
computer with Intel core2 Duo 2.33GHz CPU (only
one processor was used).
The computer used by the other two methods was
the SGI challenge with 28 196-MHz MIPS R10000
CPU (only one processor was used). In this
experiment, the MDAS was run 50 times on each
problem and the average was taken. In Table 3,
AvgD (in %) is defined as follows: AvgD=[(best
solution found by the method - best known upper
bound)/best known upper bound]*100.
Where the best known upper bound is taken from
(Hoefer, 2002). AvgT (in seconds) denotes the
average CPU time. It is noted that with just 10 seeds
(i.e., 10 randomly generated initial solutions), the
MDAS can find all the best solutions in all 50 times
(i.e., AvgD=0) on ORLIB, M* and GR benchmarks.
Also, the CPU time needed is much less than those
needed by the other two methods. For BK and FPP
benchmarks, the MDAS can also find all the best
solutions in all 50 times with 100 and 16000 seeds,
respectively. In solving these two benchmarks, the
CPU time need by the MDAS is also much less than
those needed by the other two methods. As for the
benchmark GAP, the MDAS found the best solution
of each problem in this benchmark within the 50
times of execution, but it could not find all best
solutions in any single time of execution. From
Table 3, it is observed that the MDAS outperforms
the other two methods in both the solution quality
and the computation time.
3.4 Performance Comparison of
MDAS and the other Three
Methods
In this subsection, the performance of the MDAS is
compared with those of Ghosh’s method (Ghosh,
1999), the hybrid multistart heuristic (Resende and
Werneck, 2006), and Sun’s tabu search (Sun, 2006)
on the GHOSH benchmark. There are totally 90
problems in this benchmark that are divided
according to size and type into 18 sets with five
problems in each set. The performance comparison
is shown in Table 4, within which the previous best
known solutions are taken from (Sun, 2006). Both
the data of the hybrid multistart heuristic and the
data of our MDAS are the average of 50 runs. It is
noted in Table 4 that Ghosh’s method achieves one
(out of eighteen) previous best known solution, the
hybrid multistart heuristic achieves four (out of
eighteen) previous best solutions, Sun’s tabu search
achieves fourteen (out of eighteen) previous best
solutions, and our MDAS achieves thirteen (out of
eighteen) previous best known solutions. Moreover,
the MDAS found solutions of the other four sets that
are better than the previous best known solutions
(the italics solutions in Table 4). The last row of
Class Method
ORLIB M* GR BK FPP GAP
Avg D Time Avg D Time Avg D Time Avg D Time Avg D Time Avg D Time
Hybrid
Iteration=8, Elite=5 0.000 0.05 0.004 2.19 0.000 0.09 0.028 0.09 69.370 1.63 9.573 0.348
Iteration=32, Elite=10 0.000 0.17 0.000 7.86 0.000 0.32 0.002 0.28 33.375 7.66 5.953 1.64
Iteration=2048, Elite=80 - - - - - - - - 0.000 330.9 0.820 92.09
Simple
Tabu
500 Non-improving 0.028 0.16 0.011 1.75 0.100 0.16 0.071 0.16 95.711 0.65 15.901 0.26
64000 Non-improving - - - - - - - - 71.150 52.08 6.350 22.43
MDAS
10 Random See
d
0.000 0.02 0.000 0.92 0.000 0.02 0.032 0.00 46.948 0.04 13.783 0.01
50 Random See
d
- - - - - - 0.001 0.02 3.963 0.21 8.661 0.03
100 Random See
d
- - - - - - 0.000 0.03 0.298 0.43 7.063 0.07
1000 Random See
d
- - - - - - - - 0.012 4.46 2.930 0.74
4000 Random See
d
- - - - - - - - 0.003 17.53 1.217 3.42
16000 Random See
d
- - - - - - - - 0.000 67.36 0.559 20.30
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
26
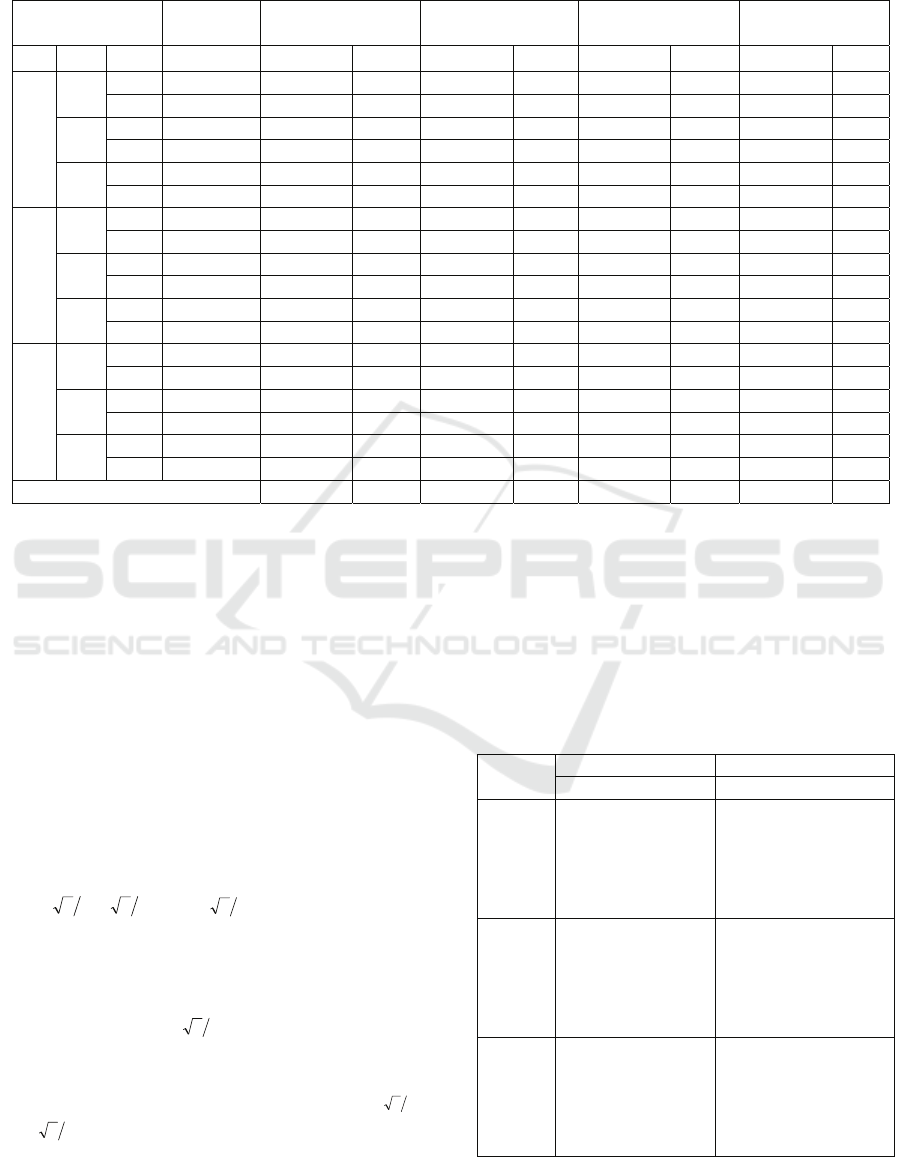
Table 4: Performance comparison of the MDAS heuristic and three other methods on benchmark GHOSH.
Instance
Previous best
known
Ghost Hybrid Tabu Search MDAS(1000Seed)
Class Size Type Value Best Time Best Time Best Time Best Time
A
250
Sy
m
257805.0 257832.6 18.256 257807.9 5.3 257805.0 2.828 257804.0 7.36
Asy
m
257917.8 257978.4 18.060 257922.1 5.7 257917.8 2.618 257917.8 7.32
500
Sy
m
511180.4 511383.6 213.316 511203.0 43.5 511180.4 15.616 511181.2 35.87
Asy
m
511140.0 511251.6 207.070 511147.4 40.3 511140.0 13.760 511136.4 35.97
750
Sy
m
763693.4 763831.2 824.288 763713.9 112.6 763693.4 39.812 763684.8 93.68
Asy
m
763717.0 763840.4 843.206 763741.0 117.5 763717.0 39.650 763716.4 92.60
B
250
Sy
m
276035.2 276185.2 6.470 276035.2 8.0 276035.2 5.628 276035.2 5.88
Asy
m
276053.2 276184.2 6.402 276053.6 8.2 276053.2 5.790 276053.2 5.92
500
Sy
m
537912.0 538480.4 71.394 537919.1 52.6 537912.0 31.432 537912.0 26.72
Asy
m
537847.6 538144.0 79.192 537868.2 52.2 537847.6 34.748 537847.6 26.73
750
Sy
m
796571.8 796919.0 409.372 796593.7 126.3 796571.8 93.352 796571.8 68.83
Asy
m
796374.4 796754.2 395.958 796393.5 127.1 796374.4 95.430 796374.4 64.71
C
250
Sy
m
333671.6 333671.6 17.322 333671.6 8.3 333671.6 9.878 333671.6 5.73
Asy
m
332897.2 333058.4 24.730 332897.2 7.4 332897.2 9.196 332897.2 5.67
500
Sy
m
621059.2 621107.2 146.482 621059.2 50.8 621059.2 71.106 621059.2 24.18
Asy
m
621463.8 621881.8 134.76 621475.2 57.4 621463.8 72.064 621463.8 26.60
750
Sy
m
900158.6 900785.2 347.414 900183.8 130.3 900158.6 229.914 900158.6 56.31
Asy
m
900193.2 900349.8 499.738 900198.6 136.5 900193.2 236.902 900193.2 56.95
Average 555535.489 236.847 555493.567 60.556 555316.189 56.096 555315.500 34.730
Table 4 lists the average values over the eighteen
sets, and from the average values, it is noted that the
MDAS outperforms the other three methods.
3.5 Performance Comparison of
MDAS and Hybrid Multistart
Heuristic on MED
The performance of the MDAS is compared with
that of the hybrid multistart heuristic on the
benchmark MED, and this comparison is shown in
Table 5. The MED benchmark contains 18 problems
with size 500, 1000, 1500, 2000, 2500 and 3000,
respectively. For each size n, there are three
problems with the opening costs of facilities being
set to
10n
,
100n
, and
1000n
, respectively.
In this experiment, the MDAS heuristic was run
50 times with 1000 seeds. It is noted in Table 5 that
the MDAS heuristic outperforms the hybrid
multistart heuristic on the first group in which the
facility’s open cost is
10n
. But the solution quality
of the hybrid multistart heuristic is better than that of
the MDAS heuristic on the second and the third
groups in which the facility’s open costs are
100n
and
1000n
, but the computation time of the latter is
less than that of the former.
Observing the above mentioned experimental
results, we conclude the following:
(1) The DAS heuristic that utilizes the Drop
operation, the Add operation and the Swap
operation performs better than the DROP
method that utilizes only the Drop operation.
Table 5: Performance comparison of the MDAS heuristic
with the hybrid multistart heuristic on benchmark MED.
instance
Hybri
d
MDAS(1000Seed)
Avg Time Avg Time
500-10 798577.0 33.2 798577.0 28.0
1000-10 1434185.4 173.9 1434171.0 130.7
1500-10 2001121.7 347.8 2000854.14 331.1
2000-10 2558120.8 717.5 2558121.5 687.4
2500-10 3100224.7 1419.5 3100174.5 1116.7
3000-10 3570818.8 1621.1 3570820.75 1667.0
500-100 326805.4 32.9 326922.375 25.6
1000-100 607880.4 148.8 607992.563 106.5
1500-100 866493.2 378.7 867149.688 293.6
2000-100 1122861.9 650.8 1123936.5 562.3
2500-100 1347577.6 1128.2 1348713.25 870.5
3000-100 1602530.9 1977.6 1605083.63 1349.5
500-1000 99196.0 23.6 99196.0 22.4
1000- 220560.9 141.7 220626.563 84.4
1500- 334973.2 387.2 335400.813 218.7
2000- 437690.7 760 438263.0 425.9
2500- 534426.6 1309.4 535134.938 675.3
3000- 643541.8 2081.4 644376.25 1017.3
THE MULTISTART DROP-ADD-SWAP HEURISTIC FOR THE UNCAPACITATED FACILITY LOCATION
PROBLEM
27

(2) The MDAS heuristic enhances the global
search capability of the DAS heuristic and the
performance of the MDAS heuristic will be
improved as the number of seeds increases.
(3) Although the MDAS heuristic is just a
heuristic, its performance is better than some state-
of-the-art metaheuristics. (Table 3 and 4)
The fact that the hybrid multistart heuristic
outperforms the MDAS heuristic on the second and
the third groups of the MED benchmark (Table 5)
indicates that the global search ability of the MDAS
heuristic is still not good enough for searching a
large solution space.
4 CONCLUSIONS
In this paper, the DAS heuristic and the multistart
DAS (MDAS) heuristic are proposed to solve the
UFLP. The DAS heuristic utilizes three operations:
the Drop operation, the Add operation, and the Swap
operation. And the MDAS heuristic enhances the
global search capability of the DAS heuristic by
applying it multiple times with different initial
solutions (seeds). Experimental results reveal that
the MDAS heuristic outperforms other state-of-the-
art heuristics on most of the benchmarks. But the
global search ability of the MDAS heuristic is still
not good enough for searching a large solution
space, therefore, in future studies, we will try to
combine a global search scheme with the DAS
heuristic to improve the performance. Also, we plan
to investigate the possibility of applying the
proposed heuristic to other combinatorial problems.
REFERENCES
Ahn, S., Cooper, C., Cornuéjols, G., Frieze, A.M., 1998.
Probabilistic analysis of a relaxation for the k-median
problem. Mathematics of Operations Research, (13) 1-
31.
Arya, V., Garg, N., Khandekar, R., Meyerson, A., 2001.
Munagala K, Pandit V. Local Search heuristics for k-
median and facility location problems. ACM
Symposium on Theory of Computing, 21-29.
Barahona, F., Chudak, F., 1999. Near-optimal solutions to
large scale facility location problems. Technical
Report RC21606, IBM, Yorktown Heights, NY, USA.
Beasley, J.E., 1993. Lagrangean heuristics for location
problems. European Journal of Operational Research,
(65) 383-399.
Bilde, O., Krarup, J., 1977. Sharp lower bounds and
efficient algorithms for the simple plant location
problem. Annals of Discrete Mathematics, (1) 79-97.
Cornuéjols, G., Nemhauser, G.L., Wolsey, L.A., 1990.
The uncapacitated facility location problem. in: P.B.
Mirchandani, R.L. Francis (Eds.), Discrete Location
Theory, Wiley-Interscience, New York, 119-171.
Erlenkotter, D., 1978. A dual-based procedure for
uncapacitated facility location. Operations Research,
(26) 992-1009.
Galvao, R.D., Raggi, L.A., 1989. A method for solving to
optimality uncapacitated facility location problems.
Annals of Operations Research, (18) 225-244.
Ghosh, D., 2003. Neighborhood search heuristics for the
uncapacitated facility location problem. European
Journal of Operational Research, (150) 150-162.
Hoefer, M., 2002. Performance of heuristic and
approximation algorithms for the uncapacitated
facility location problem. Research Report MPI-I-
2002-1-005, Max-Planck-Institutfür Informatik.
Hoefer, M., 2002. UflLib, http://www.mpi-
sb.mpg.de/units/agl/projects/benhmarks/UflLib.
Jain, K., Mahdian, M., Saberi, A., 2002. A new greedy
approach for facility location problems, in:
Proceedings of the 34th Annual ACM Symposium on
Theory of Computing (STOC), ACM Press, 731-740.
Kochetov, Y., Ivanenko, D., 2003. Computationally
difficult instances for the uncapacitated facility
location problem. in: Proceedings of the 5th
Metaheuristics International Conference (MIC), 41:1-
41:6.
Körkel, M., 1989. On the exact solution of large-scale
simple plant location problems, European Journal of
Operational Research, (39) 157-173.
Kratica, J., Tosic, D., Fillipovic, V., Ljubic, I., 2001
Solving the simple plant location problem by genetic
algorithm. RAIRO Operations Research, (35) 127-
142.
Kuehn, A.A., Hamburger, M.J., 1963 A heuristic program
for locating warehouses. Management Science (9)
643-666.
Mahdian, M., Ye, Y., Zhang, J., 2002. Improved
approximation algorithms for metric facility location
problems, in: Proceedings of the 5th International
Workshop on Approximation Algorithms for
Combinatorial Optimization (APPROX), volume 2462
of Lecture Notes in Computer Science, Springer-
Verlag, 229-242.
Michel, L., Van Hentenryck, P., 2003. A simple tabu
search for warehouse locatiohn. European Journal of
Operational Research, (157) 576-591.
Nemhauser, G.L., Wolsey, L.A., Fisher, L.M., 1978 An
analysis of approximations for maximizing
submodular set functions, I. Mathematical
Programming, (14) 265-94.
Resende, M.G.C., Werneck, R.F., 2006. A hybrid
multistart heuristic for the uncapacitated facility
location problem. European Journal of Operational
Research, (174) 54-68.
Sun, M., 2006. Solving the uncapacitated facility location
problem using tabu search. Computers & Operations
Research, (33) 2563-2589.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
28
