
SOME COMPLEXITY RESULTS CONCERNING THE
NON-PREEMPTIVE ‘THRIFT’ CYCLIC SCHEDULER
Michael Short
Embedded Systems Laboratory University of Leicester
University Road, Leicester, U.K.
Keywords: Embedded Systems, Non-preemptive scheduling, Feasibility Analysis, Complexity.
Abstract: Non-preemptive schedulers, despite their many perceived drawbacks, remain a very popular choice for
practitioners of real-time and embedded systems. Although feasibility conditions for non-preemptive
scheduling models have previously been considered in the literature, to date little attention has been paid to
the non-preemptive ‘thrift’ (or ‘TTC’) cyclic scheduler. This type of scheduler differs from a standard
‘cyclic executive’ in that it does not allow the use of inserted idle-time, and it does not require a lookup
table of task executions over the major cycle of the schedule; a feasible schedule is effectively created by
assigning release times (‘offsets’) to the tasks. To this end, this paper seeks to address the complexity of
generating a feasible cyclic schedule for such a scheduler. It will be shown that when a single set of release
times is assigned to the tasks, deciding feasibility of the resulting schedule is coNP-Complete (in the strong
sense); and the release time assignment problem for such a scheduler is complete for ∑
2
p
.
1 INTRODUCTION
In many real-time embedded systems, some form of
scheduler is generally used instead of a full “real-
time operating system” to keep the software
environment as simple as possible. In general, such
systems may be designed around several basic
paradigms: time-triggered or event-triggered, and
preemptive or co-operative (non-preemptive). This
paper is concerned with single-processor time-
triggered, non-preemptive schedulers.
Such architectures have been found to be a good
match for a wide range of low-cost, resource-
constrained applications. These architectures also
demonstrate comparatively low levels of task jitter,
CPU overheads, memory resource requirements and
power consumption (Pont 2001; Baker & Shaw
1989; Short et al. 2008; Burns et al. 1994).
Additionally, such schedulers exhibit extremely high
levels of predictability and determinism. Exploratory
studies also seem to indicate better transient error
recovery properties in these systems than their
preemptive counterparts (Short et al. 2008).
Because of these properties, non-preemptive
schedulers have proved to be extremely effective at
implementing systems such as process controllers,
robotics, automotive applications and other types of
system in which reliability is a key design goal (e.g.
Gendy & Pont 2008; Short et al. 2008; Burns et al.
1994; Pont 2001).
Although non-preemptive systems are inherently
free of deadlocks and other concurrency issues by
the very nature of their design (Pont 2001; Baker &
Shaw 1989; Short et al. 2008), the fact that tasks
cannot preempt one another introduces several
complexity issues related to feasibility analysis
(Garey & Johnson 1979). A feasible task set is one
in which all jobs generated by all tasks in the system
can be said to meet their deadlines over the lifetime
of the system.
Various differing models for the implementation
of a ‘cyclic executive’ – a basic time-triggered non-
preemptive design - have been proposed over the
years, along with appropriate discussion and
mathematical techniques for feasibility analysis.
Relatively recently, the non-preemptive ‘thrift’
cyclic scheduler (or simply TTC scheduler) has been
proposed (Pont 2001). This scheduling algorithm
essentially maintains a system of congruence’s to
achieve its behaviour, and is presented in a
simplified form in Figure 1. As can be seen, the
scheduler is driven by a periodic timer signal
(typically an interrupt). When tasks are released by
the scheduler, they are immediately dispatched on a
first-come, first-served basis (FCFS).
347
Short M. (2009).
SOME COMPLEXITY RESULTS CONCERNING THE NON-PREEMPTIVE ‘THRIFT’ CYCLIC SCHEDULER.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 347-350
DOI: 10.5220/0002177603470350
Copyright
c
SciTePress

START
tick :=0; // Initialize the clock ‘tick’ variable
DO(FOREVER) // Enter infinite loop
FOR i := 1 TO n DO // n is the number of tasks
IF(((tick – r
i
) mod(p
i
)) = 0)
Run(t
i
)// Immediately execute any released task
END FOR
Wait_Timer(); // Wait for the next timer tick to occur
tick := tick + inc; // Increase the time index by a prefixed increment factor
END DO
EXIT
Figure 1: Thrift scheduling algorithm.
As can be seen, the scheduler does not support
the use of ‘inserted idle time’, and thus does not
require a lookup table of task and process executions
to be created over the duration of the major cycle,
which is a fundamental requirement in a ‘standard’
cyclic executive (Baker & Shaw 1989; Burns et al.
1994). This fundamental difference allows the
scheduler to better handle tasks with larger and non-
harmonic periods, requiring only storage space O(n)
as compared to O(nh) where n is the number of tasks
and h is the major cycle length.
In the case of the non-preemptive thrift
scheduler, generating a feasible schedule surmounts
to assigning specific release times to tasks such that
a ‘task overrun’ – an overload of the processor in
any given time quantum - does not occur (Pont
2001; Gendy & Pont 2008). The time quantum is
normally referred to as the scheduler ‘tick’ interval
t
Tick
and is generally chosen to be as large as possible
given the task periods, according to (1):
1
gcd( , , )
Tick n
tpp= …
(1)
With such an arrangement, w.l.o.g. the task
release times can be specified as integer multiples of
t
tick
(Pont 2001; Gendy & Pont 2008). Since it has
been suggested that creating the lookup table for a
‘standard’ cyclic executive is NP-Hard (Burns et a.
1994), this short paper seeks to explore the
complexity of the offset assignment process in the
‘thrift’ cyclic scheduler. In Section 2 of the paper, a
simple polynomial-time sufficient condition for
feasibility is developed; however it is clear that this
simple condition is very pessimistic. In Section 3 of
the paper, the complexity of designing a TTC
schedule is then considered, and it will be shown
that even verifying the feasibility of a candidate
solution is coNP-Complete (in the strong sense), i.e.
intractable. This Section also shows that the problem
of assigning specific release times to tasks is
complete for the second level of the polynomial
hierarchy, i.e. NP
NP
-Complete using the notation of
Garey & Johnson (1979). Section 4 concludes the
paper.
2 A SIMPLE FEASIBILITY TEST
As mentioned in Section 1, the primary condition for
feasibility in a non-preemptive thrift cyclic schedule
is that task overruns do not occur. Given a set of
tasks
τ
, where each t
i
∈
τ
can be represented by a
tuple:
(
)
,,
iiii
tpcr= (2)
In which p
i
is the task period, c
i
is the (worst
case) computation time of the task and r
i
is the task
release time (note that a specific relative deadline
can be omitted). A necessary condition for
feasibility is that the computation time of each task
is less than or equal to t
tick
, and it follows that a very
simple sufficient condition for feasibility of the task
set is as follows:
iTick
i
ct
τ
∈
≤
∑
(3)
It is quite straightforward to see that if the
summed execution times of the tasks does not
exceed the tick interval, then regardless of the
choice of task release times (which are integer
multiples of t
tick
) then a task overrun cannot occur. It
is also trivial to observe that this condition is very
pessimistic, as shown by the example in Figure 2,
with the tasks having periods and execution times
given by {5, 2}, {15, 2 and {15,2}; resulting in a
tick interval of 5 according to (1). This Figure also
highlights the effect that the choice of task release
times has on feasibility. In the following Section, the
complexity of this release time assignment process
will be investigated.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
348
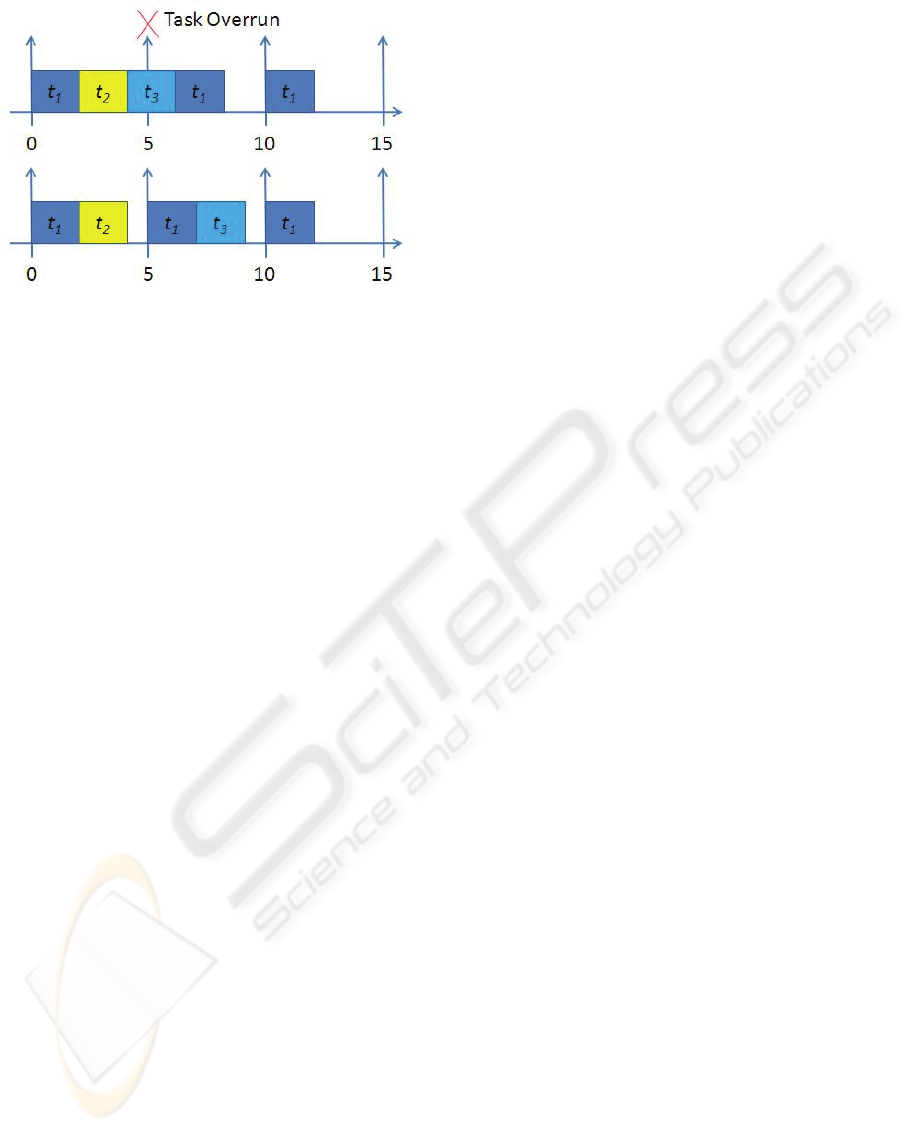
Figure 2: Effect of task release times on feasibility,
showing (top): a synchronous infeasible task set; (bottom):
an asynchronous feasible task set with release time of 1
tick added to t
3
.
3 THE COMPLEXITY OF AN
EXACT FEASIBILITY TEST
3.1 Solution Verification
Suppose we have been given a candidate solution
(feasible schedule) for a thrift cyclic scheduler, i.e a
set of tasks with specific release times; it is natural
to consider the complexity of verifying that this
solution is actually feasible. It will now be shown
that deciding the feasibility of such a ‘concrete’
thrift schedule (the FTS problem) is strongly coNP-
Complete. Membership of the problem in coNP
follows since, form Figure 1, given a tick interval j
in which a task overrun occurs, the execution time
commanded in this interval may be determined in
time proportional to n. Prior to giving the hardness
proof, the simultaneous congruences problem (SCP)
will be introduced; SCP was shown to be NP-
Complete, in the strong sense, by Baruah et al.
(1990):
Simultaneous Congruences Problem (SCP)
Instance: A set A of ordered integer pairs {(x
1
, y
1
) …
(x
n
, y
n
)} and a positive integer k > 1.
Question: Is there a subset A’ ⊆ A of k ordered pairs,
and a positive integer z, such that for all (x
i
, y
i
) ∈ A’,
z ≡ x
i
mod(y
i
)?
Theorem 1: FTS is strongly coNP-Complete.
Proof: Transformation from the compliment of SCP.
Let
φ
= < (x
1
, y
1
) … (x
n
, y
n
), k > denote an arbitrary
instance of SCP. From this a set of n concrete tasks
for an instance of FTS are created according to (4),
with a value of t
tick
equal to k-1. This transformation
can be performed in time proportional to n and is
hence polynomial.
1
i i tick
i
i i tick
p
xt
c
ryt
=
=
=
(4)
Next, it is argued that a positive solution to
φ
exists iff there is a negative answer to FTS. If FTS is
negative, then it implies that during at least one tick
interval j, the processor demand is greater than t
tick
.
Since t
tick
is equal to k-1, and given our construction
of the task execution times, at least k tasks must be
simultaneously released at the start of tick interval j;
this gives a solution to
φ
with a certificate j.
Conversely, if the answer to FTS is positive, then the
peak processor demand is ≤ t
tick
and a tick interval in
which k or more tasks are simultaneously released
does not exist; implying a negative answer to
φ
.
Since SCP is strongly NP-Complete, the Theorem is
proved.
3.2 Release Time Assignment
Given this result, it is clear that if the verification of
a candidate solution is coNP-Complete, then the
problem of assigning release times (the ‘TS’
problem) is strongly coNP-Hard. However, since
there also seems to be an exponential number of
possible start times for a thrift scheduling instance,
under the assumption that P ≠ NP it is also
worthwhile investigating exactly where this problem
lies on the so-called ‘polynomial hierarchy’ (Garey
& Johnson 1979). It can be seen that the task release
times for ‘Yes’ (feasible) instances of this problem
can be encoded in a number of bits that is less than
or equal to the task set periods, and hence the size of
the overall TS problem instance. Given the previous
Theorem, the resulting schedule is verifiable in
polynomial time by a Turing machine with an oracle
for the FTS problem; the problem resides in Σ
2
p
. To
show that the problem is complete for this
complexity class, the Periodic Maintenance
Scheduling Problem (PMSP) is now introduced.
This problem is known to be Σ
2
p
– Complete
(Baruah et al. 1990).
SOME COMPLEXITY RESULTS CONCERNING THE NON-PREEMPTIVE 'THRIFT' CYCLIC SCHEDULER
349

PERIODIC MAINTENANCE
SCHEDULING PROBLEM (PMSP)
Instance: A set C of ordered pairs {(n
1
, c
1
) … (n
n
, c
n
)}, with each c
i
representing a maintenance activity
having an integer period n
i
, positive integer k > 1.
Question: Is there a mapping of the activities in C to
positive integer time slots such that successive
occurrences of each c
i
are exactly n
i
time slots apart,
and no more than k activities ever collide in a single
slot?
Theorem 2: TS is Σ
2
p
- Complete.
Proof: Transformation from PMSP.
Let C = < ((c
1
, n
1)
… (c
n
, n
n
), k > denote an arbitrary
instance of PMSP. From this a set N of n tasks to be
scheduled by TS are created according to (5), with a
value of t
tick
equal to k:
1=
=
i
tickii
c
tnp
(5)
Again this transformation can be performed in
polynomial time. Next, it is argued that a solution to
C exists iff N can be scheduled by TS. If the answer
to this instance of TS is ‘Yes’, this implies that
release times can be assigned to each task in N such
that a task overrun does not occur, which from the
transformation given implies that a maintenance
schedule for C - in which no more than k activities
occur simultaneously - also exists with a certificate
(r
1
… r
n
). Conversely, if the answer to TS is ‘No’,
then a schedule in which a task overrun does not
occur does not exist for any combination of task
release times, implying that a maintenance schedule
for C - in which no more than k activities occur
simultaneously - does not exist. Since PMSP is Σ
2
p
-
Complete, the Theorem is proved.
4 CONCLUSIONS
This paper has considered the complexity of
generating a feasible cyclic schedule for the non-
preemptive ‘thrift’ cyclic scheduler. It has been
shown that an efficient - but also very pessimistic -
sufficient feasibility condition exists. However, an
exact solution to the problem requires the
assignment of specific release times to the tasks; the
complexity of this problem has been shown to be
NP
NP
-Complete, with the verification of a candidate
solution being strongly coNP-Complete.
These results imply that heuristic techniques that
may be used to solve the TS problem - such as the
algorithm proposed by Gendy & Pont (2008) – must
be strongly coNP-Hard if they provide any
confirmation that the resulting schedule is indeed
feasible. In conclusion, although the thrift cyclic
scheduler possesses many desirable qualities,
extreme computational difficulties may occur when
designing a schedule. In such cases, then the non-
preemptive EDF scheduling algorithm (shown to be
optimal among the non-idling non-preemptive
scheduling strategies by Jeffey et al. 1991) may be
beneficial.
REFERENCES
Baker, T.P. and Shaw, A., 1989. The cyclic executive
model and Ada, Real-Time Systems, Vol. 1, No. 1, pp.
7-25.
Baruah, S.K., Rosier, L.E. and Howell, R.R., 1990.
Algorithms and Complexity concerning the
preemptive scheduling of periodic tasks on one
processor, Real-Time Systems, Vol. 2, No. 4, pp. 301-
324.
Burns, A., Hayes, N. and Richardson, M.F., 1995.
“Generating Feasible Cyclic Schedules”, Control
Engineering Practice, Vol. 3, No. 2, pp. 151-162.
Garey, M.R. and Johnson, D.S., 1979. Computers and
Intractability: A guide to the Theory of NP-
Completeness, W.H. Freeman & Co Ltd, April 1979.
Gendy, A.K. and Pont, M.J., 2008. Automatically
configuring time-triggered schedulers for use with
resource-constrained, single-processor embedded
systems, IEEE Trans. on Industrial Informatics, Vol.
4, No. 1, pp. 37-45.
Jeffay, K., Stanat, D.F. and Martel, C.U., 1991. On non-
preemptive scheduling of periodic and sporadic tasks,
In Proceedings of the 12th IEEE Symposium on Real-
Time Systems, pp. 129-139.
Pont, M.J., 2001. Patterns For Time Triggered Embedded
Systems, ACM Press / Addison Wesley.
Short, M., Pont, M.J. and Fang, J., 2008. Exploring the
impact of preemption on dependability in time-
triggered embedded systems: A pilot study, In:
Proceedings of the 20th Euromicro conference on real-
time systems (ECRTS 2008), Prague, Czech
Republic., pp. 83-91, 2-4 July 2008.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
350
