
A COMPARATIVE STUDY BETWEEN CONVENTIONAL AND
CONTINUOUS GENETIC ALGORITHMS FOR THE SOLUTION
OF CARTESIAN PATH GENERATION PROBLEMS OF ROBOT
MANIPULATORS
Za'er Salim Abo-Hammour, Mohammad Suleiman Saraireh
Jordan University, Faculty of Engineering, Mechatronics Department, Amman-Jordan
Mutah University, Faculty of Engineering, Computer Engineering Department, Mutah-Kerak-Jordan
Othman M-K. Alsmadi
Jordan University, Faculty of Engineering, Electrical Department, Amman-Jordan
Keywords: Robot manipulators, Singularity avoidance, Cartesian path generation, Inverse kinematics problem,
Continuous genetic algorithms, Conventional genetic algorithms.
Abstract: In this paper, a comparative study between the continuous and the conventional GAs for the solution of
Cartesian path generation problems of robot manipulators is performed. The difference between both
algorithms lies in the ways in which initialization phase, the crossover operator, and the mutation operator
are applied. Generally, the operators of the Continuous Genetic Algorithms (CGA) are of global nature, i.e.,
applied at the joint’s path level, while those of conventional GA are of local nature, i.e., applied at the path
point level. It was concluded from the simulations included that CGAs have several advantages over
conventional GAs when applied to the path generation problems; first, the joints’ paths obtained using the
conventional GA are found to be of highly oscillatory nature resulting in very large net joints displacements
consuming more energy and requiring more time. This problem is totally avoided in CGA where the
resulting joints’ paths are smooth. Second, the CGA has faster convergence speed (number of generations
required for convergence) than the conventional GA. Third, the average execution time per generation in the
conventional GA is two to three times that in the CGA. This is due to the fact that the conventional GA
requires a coding process, which is not the case in the CGA. Fourth, the memory requirements of the
conventional GA are higher than those of the CGA because the former uses genotype and phenotype
representations while the later utilizes only the phenotype representation.
1 INTRODUCTION
Genetic algorithms, GAs, are broadly applicable,
general-purpose, generate-and-test optimization
methods based on Darwinian principles of biological
evolution, that is, "the survival of the fittest" and the
genetic operators. They were developed by Holland
(Holland, 1975) to study the adaptive process of
natural systems and to develop artificial systems that
mimic the adaptive mechanism of natural systems.
Conventional genetic algorithms were used by
the robotics community for solving the path
generation problems of robot manipulators where
the inverse kinematics problem is formulated as an
optimization problem and is then solved using GAs
based on the use of the forward kinematics model of
the manipulator. In this regard, Parker et. al.1989
introduced genetic algorithms for solving the inverse
kinematics problem of redundant manipulators
where GAs were used to move a robot to a target
location while minimizing the largest joint
displacement from the initial position. After that,
Davidor proposed a special GA for path generation
problem of redundant manipulators (Davidor, 1991).
He considered generating robot path as a typical
ordered-dependent process and presented a GA
model for this problem. The main characteristics of
his algorithm are the use of dynamic individuals
417
Salim Abo-Hammour Z., Suleiman Saraireh M. and M-K. Alsmadi O. (2009).
A COMPARATIVE STUDY BETWEEN CONVENTIONAL AND CONTINUOUS GENETIC ALGORITHMS FOR THE SOLUTION OF CARTESIAN PATH
GENERATION PROBLEMS OF ROBOT MANIPULATORS.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 417-424
DOI: 10.5220/0002206404170424
Copyright
c
SciTePress

structures and a modified crossover operator called
analogous crossover. The goal of the proposed GA is
to minimize the accumulative deviation between the
generated and the desired path.
CGA has been introduced recently as an
alternative and efficient technique for the solution of
path generation problems of robot manipulators
(Abo-Hammour et al, 2002). The CGA is that
algorithm which depends on the evolution of curves
in one-dimensional space. In general, CGAs use
smooth operators and avoid sharp jumps in the
parameter values. The algorithm was a contribution
to the solution of the inverse kinematics problem of
manipulators based on the concept of the
minimization of the accumulative path deviation.
The effect of various CGA operators and genetic-
related control parameters, and the effect of various
robot-related parameters on the convergence speed
of our proposed methodology for Cartesian path
generation was explored in (Abo-Hammour, 2005)
and (Abo-Hammour, 2002).
CGAs possess several advantages when applied
to path generation problems of robot manipulators
(Abo-Hammour et al, 2002): first, it can be applied
to any general serial manipulator with positional
degrees of freedom that might not have any derived
closed-form solution for its inverse kinematics.
Second, to the authors’ knowledge, it is the first
singularity-free path generation algorithm that can
be applied at the path update rate of the manipulator.
Third, extremely high accuracy can be achieved
along the generated path almost similar to analytical
solutions, if available. Fourth, the proposed
approach can be adopted to any general serial
manipulator including both non-redundant and
redundant systems.
In this paper, a detailed comparative study
between conventional and CGAs for the solution of
path generation problems of robot manipulators in a
free-of-obstacles workspace is performed. This
study includes the nature of the joints’ paths
obtained using both algorithms, the effect of the
joints’ limits on the solutions obtained using
conventional genetic algorithm, the influence of the
degree of redundancy and the number of knots along
the Cartesian path on the convergence speed of both
algorithms, and finally a step by step switching from
conventional genetic algorithm to CGA. It is to be
noted that both algorithms are based on the concept
of the minimization of the accumulative path
deviation only; no other objective functions are
included in this work.
The organization of the remainder of the paper is
as follows: the formulation of the path generation
problem for solution by genetic algorithms is
described in section 2. Section 3 covers both of the
CGA and the conventional genetic algorithm in
details. The comparative study between the two
algorithms is covered in Section 4. Finally,
conclusions are given in Section 5.
2 FORMULATION OF THE PATH
GENERATION PROBLEM
Let us consider a robot manipulator with M degrees
of freedom and N task space coordinates. Assume
that a desired Cartesian path, P
dc
, is given, the
problem is to find the set of joint paths, P
θ
, such that
the accumulative deviation between the generated
Cartesian path, P
gc
, and the desired Cartesian path,
P
dc
, is minimum. In other words, we are interested in
the determination of a set of feasible joint angles,
which corresponds to a set of desired spatial
coordinates of the end-effector in the task space.
It is to be noted that after the sampling process
by N
k
samples, P
dc
and P
gc
are matrices of dimension
N by N
k
while P
θ
is a matrix of M by N
k
dimension.
After sampling the geometric path, at the path
update rate for best accuracy, the generated values of
the joint angles using the genetic algorithm, P
θ
, are
used by the direct (forward) kinematics model of the
robot to obtain the generated Cartesian path given
by.
)(
θ
PFP
kgc
=
(1)
Where F
k
represents the forward kinematics
model of the manipulator.
The deviation between the desired Cartesian
path, P
dc
, and the generated Cartesian path, P
gc
, at
some general path point, i, is given as.
∑
=
−=
N
k
gcdc
ikPikPiE
1
),(),()(
(2)
The accumulative deviation between the two
paths (desired and generated) depends on whether
the initial and final joint angles corresponding to the
initial and final configurations of the end-effector
are given in advance using the inverse kinematics
model of the manipulator or through other numerical
technique (fixed end points) or the case in which the
initial and final joint angles are not given (free end
points). For the fixed end points case, the
accumulative deviation between the two paths is
given by the formula.
∑∑∑
−
=
−
==
=−=
1
2
1
21
)(),(),(
kk
N
i
N
i
N
k
gcdc
iEikPikPE
(3)
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
418
While for the free end points case, the accumulative
deviation between the two paths is given by the
formula.
∑∑∑
===
=−=
kk
N
1i
N
1i
N
1k
gcdc
)i(E)i,k(P)i,k(PE
(4)
The fitness function, a nonnegative measure of the
quality of individuals, is defined as:
E
1
1
F
+
=
(5)
The optimal solution of the problem is obtained
when the deviation function, E, approaches zero and
correspondingly the fitness function, F, approaches
unity.
3 GENETIC ALGORITHMS
GAs are based on the triangle of genetic
reproduction, evaluation and selection (Goldberg,
1989). Genetic reproduction is performed by means
of two basic genetic operators: crossover and
mutation. Evaluation is performed by means of the
fitness function that depends on the specific
problem. Selection is the mechanism that selects
parent individuals with probability proportional to
their relative fitness. The genetic algorithm used in
this work consists of the following steps:
1. Initialization. An initial population comprising
of N
p
individuals is randomly generated in this
phase.
2. Evaluation. The fitness, a nonnegative measure
of quality used as a measure to reflect the
degree of goodness of the individual, is
calculated for each individual in the population
as given in Equation 6.
3. Selection. In the selection process, individuals
are chosen from the current population to enter
a mating pool devoted to the creation of new
individuals for the next generation such that the
chance of a given individual to be selected to
mate is proportional to its relative fitness. This
means that best individuals receive more copies
in subsequent generations so that their desirable
traits may be passed onto their offspring. This
step ensures that the overall quality of the
population increases from one generation to the
next.
4. Crossover. Crossover provides the means by
which valuable information is shared among the
population. It combines the features of two
parent individuals to form two children
individuals that may have new patterns
compared to those of their parents and plays a
central role in GAs.
5. Mutation. Mutation is often introduced to guard
against premature convergence. Generally, over
a period of several generations, the gene pool
tends to become more and more homogeneous.
The purpose of mutation is to introduce
occasional perturbations to the parameters to
maintain genetic diversity within the population.
6. Replacement. After generating the offspring’s
population through the application of the
genetic operators to the parents’ population, the
parents’ population is totally replaced by the
offspring’s population. This is known as non-
overlapping, generational, replacement. This
completes the “life cycle” of the population.
7. Termination. The GA is terminated when some
convergence criterion is met. Possible
convergence criteria are: the fitness of the best
individual so far found exceeds a threshold
value, the maximum number of generations is
reached, or the progress limit, the improvement
in the fitness value of the best member of the
population over a specified number of
generations is less than some predefined
threshold, is reached. After terminating the
algorithm, the optimal solution of the problem is
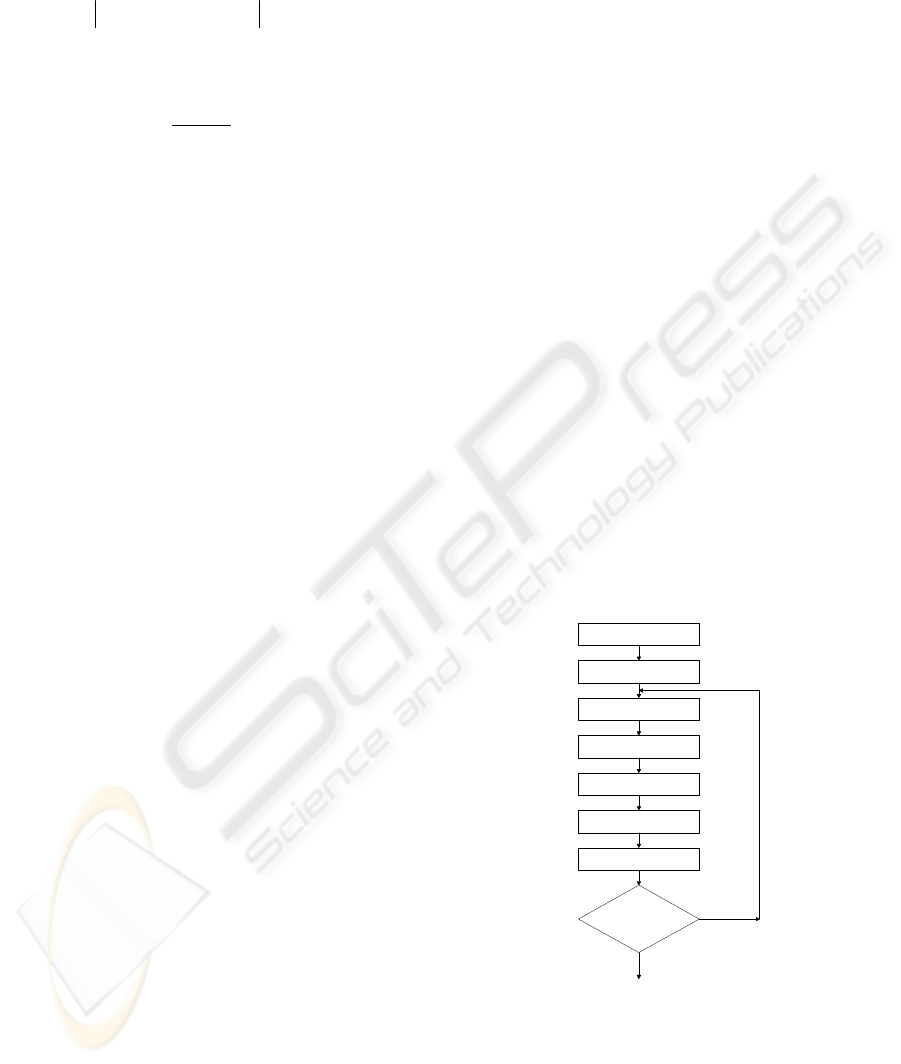
the best individual so far found. The block
diagram of the genetic algorithm is given in
Figure1.
NO
TERM INATION
OF GA ?
YES
STOP
FITNESS EVALUATION
REPLACEMENT
CROSSOVER
MUTATION
SELECTION
FITNESS EVALUATION
INITIALIZATION
Figure 1: Block Diagram of the Genetic Algorithm.
The conventional genetic algorithm and the CGA
used in our work consist of the steps given
previously. The evaluation step, selection step,
replacement step and the termination step are
identical in both algorithms. The differences
A COMPARATIVE STUDY BETWEEN CONVENTIONAL AND CONTINUOUS GENETIC ALGORITHMS FOR
THE SOLUTION OF CARTESIAN PATH GENERATION PROBLEMS OF ROBOT MANIPULATORS
419

between both algorithms lie in the initialization
phase, the crossover operator, and the mutation
operator. These operators have the same goal in both
algorithms; the difference lies in the way in which
each operator is applied in the corresponding
algorithm. These operators are applied at the joint’s
path level in case of the CGA while they are applied
at the path point level in case of conventional
genetic algorithm. That is, the operators of the CGA
are of global nature while those of conventional
genetic algorithm are of local nature. In addition to
that, it is to be noted that the conventional genetic
algorithm uses the genotype and phenotype data
presentations while the CGA uses only the
phenotype data presentation. This fact requires a
coding process in conventional genetic algorithm,
which is not the case in CGA. The CGA is fully
described in (Abo-Hammour et al, 2002). The reader
is kindly asked to read this reference for the
complete details about it.
The operators of the conventional genetic
algorithm that include the initialization phase, the
crossover operator, and the mutation operator are
applied at the path point level. In relation to the
initialization phase, individuals are generated
randomly at the gene level. Conventional crossover
involves exchanging genes between each pair of
parents selected from mating pool. It is generally
applied with relatively high probability of crossover,
P
c
. Regarding the mutation operator, the bitwise
complement mutation is applied in the conventional
genetic algorithm at the gene level with some low
probability of mutation, P
m
. It is realized by
performing bit inversion (flipping) on some
randomly selected bit positions of children bit
strings.
To summarize the evolution process in
conventional genetic algorithm, an individual is a
candidate solution of the joints’ angles; that is, each
individual consists of a string of L=M* N
k
* N
s
genes. Initially, N
p
individuals are randomly
generated representing the initial population. The
population undergoes the selection process, which
results in a mating pool among which pairs of
individuals are crossed with probability P
c
. This
process results in an offspring’s generation where
every individual child undergoes mutation with
probability P
m
. After that, the next generation is
produced according to the replacement strategy
applied. This process is repeated till the convergence
criterion is met where the M
×
N
k
parameters of the
best individual are the required joints’ angles.
4 SIMULATION RESULTS
The CGA and the conventional genetic algorithm
were used to solve the Cartesian path generation
problem of 2R and 3R planar manipulators. The
initial settings of the CGA parameters are as
follows: the population size is set to 500 individuals.
The rank-based selection strategy is used where the
rank-based ratio is set to 0.1. The individual
crossover probability is kept at 0.9; the joint
crossover probability is also set to 0.9. The
individual mutation probability and the joint
mutation probability are kept at 0.9. Generational
replacement scheme is applied where the number of
elite parents that are passed to the next generation is
one-tenth of the population. The genetic algorithm is
stopped when one of the following conditions is met.
First, the fitness of the best individual of the
population reaches a value of 0.99; that is the
accumulative deviation of the end-effector, E, of the
best individual is less than or equal to 0.01. Second,
the maximum deviation at any path point of the best
individual is less than or equal to 0.001. Third, a
maximum number of 10000 generations is reached.
Fourth, the improvement in the fitness value of the
best individual in the population over 1000
generations is less than 0.01. It is to be noted that the
first two conditions indicate to a successful
termination process (optimal solution is found),
while the last two conditions point to a partially
successful end depending on the fitness of the best
individual in the population (near-optimal solution is
reached).
The initial settings of the conventional genetic
algorithm parameters are similar to those of the
CGA except those related to crossover, mutation and
coding process which are as following: the crossover
probability is kept at 0.7, the mutation probability is
kept at 0.01. The uniform crossover method is used
as the algorithm’s default crossover method. The
required accuracy of the phenotype values is set to
0.001 and binary coding scheme is used.
Due to the stochastic nature of GAs, twelve
different runs were made for every result obtained in
this work using a different random number generator
seed; results are the average values whenever
possible.
The selected Cartesian path generation problem
is of straight line shape as given by:
25.0x,0.0x
finalinitial
==
)1i(*
1N
xx
x)i(X)i,1(P
k
initialfinal
initialdcdc
−
−
−
+==
(6)
kdcdc
NiiYiP ≤≤
=
=
1,25.0)(),2(
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
420
Two manipulators are used in this work; 2R
planar manipulator and 3R planar redundant
manipulator. For the 2R manipulator, the link
parameters are L
1
=L
2
=L=0.5 meter. For this case,
N=2, M=2,
θ
lower
(h) =-180
˚
and
θ
upper
(h) =180
˚
for
h=1,2. For the 3R planar redundant manipulator, the
link parameters are L
1
=L
2
=L
3
=0.5 meter. For this
case, N=2, M=3,
θ
lower
(h) =-180
˚
and
θ
upper
(h)
=180
˚
for h=1,2,3.
The number of path points along the Cartesian
path, N
k
, is set to 20 points. The initial and final
joints’ angles corresponding to the initial and final
configurations of the end-effector along the
Cartesian path are not given (i.e., free end points
case).
Initially, the conventional genetic algorithm was
used to solve the given path generation problem for
both manipulators. For the 2R manipulator, the
algorithm reaches a fitness value of 0.99 within 50
generations and the average path point deviation is
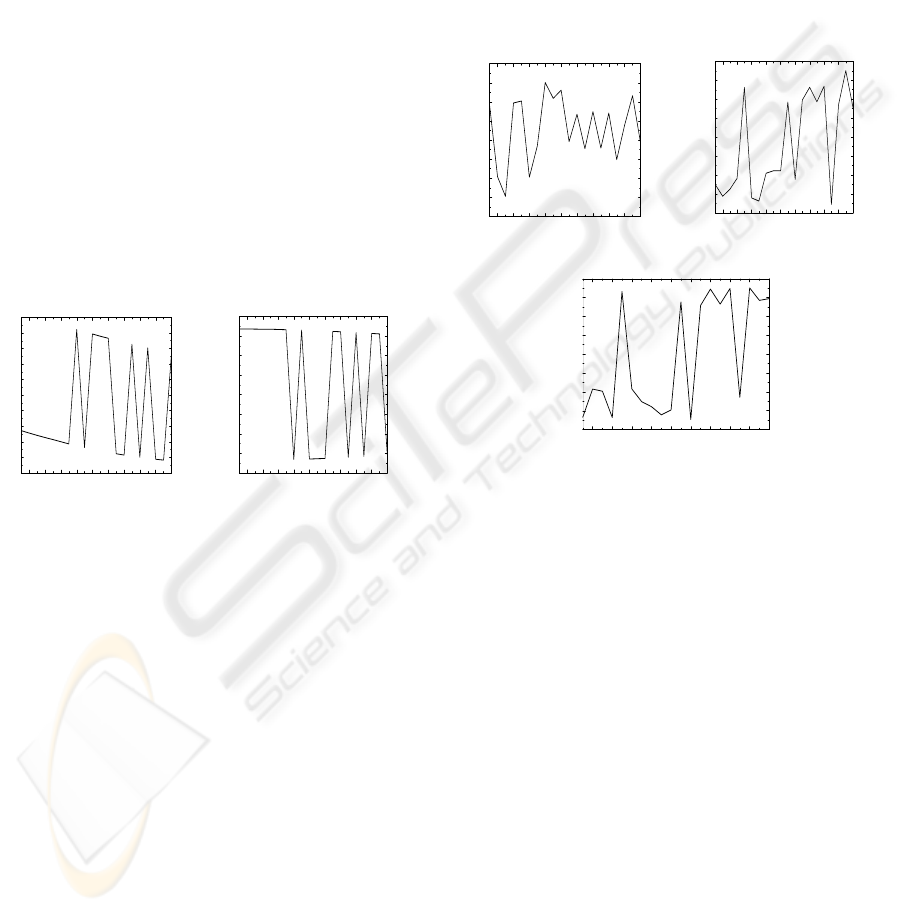
almost 0.0005 meter. The joints’ paths for the first
and second joints of the 2R manipulator are shown
in Figure 2.
2 4 6 8 10 12 14 16 18 20
-40
-20
0
20
40
60
80
100
120
140
160
Joint Angle (Degree)
Pat h Point (i)
2 4 6 8 10 12 14 16 18 20
-180
-135
-90
-45
0
45
90
135
180
Joint Angle (Degree)
Pat h Point (i)
(a) First Joint (b) Second Joint
Figure 2: Joints’ Paths of 2R Manipulator Using
Conventional Genetic Algorithm for (a) First Joint, and (b)
Second Joint.
It is obvious that the resulting solution curves in
joint space are highly oscillatory within the given
range of the joints’ limits. For the given
manipulator, there exist two possible solutions for
the inverse kinematics problem corresponding to
“elbow up” and “elbow down” configurations. It is
clear that the resulting solutions for both joints have
multiple switching points between these two
possible solutions. The switching process from one
solution corresponding to one robot configuration to
another solution corresponding to other robot
configuration results in very large net joints
displacements consuming more energy and requiring
more time. As a result, while solving such problems,
the switching from “elbow up” configuration to the
“elbow down” configuration should not be allowed
despite the fact that it is still a solution to the
problem. Generally, the probability of switching
between different solutions increases as the number
of feasible solutions of the manipulator increases.
For the 3R planar redundant manipulator, the
algorithm reaches a fitness value of 0.99 within 72
generations and the average path point deviation is
almost 0.0005 meter. The joints’ paths for the first,
second and third joints of the 3R manipulator are
shown in Figure 3. It is obvious that the resulting
joints’ paths are highly oscillatory within the range
of the joints’ limits, which results in large net
displacements of the joints.
2 4 6 8 10 12 14 16 18 20
-180
-135
-90
-45
0
45
90
135
180
Joint Angle (Degree)
Pat h Point (i)
2 4 6 8 101214161820
-180
-135
-90
-45
0
45
90
135
180
Joint Angle (Degree)
Pat h Point ( i)
(a) First Joint (b) Second Joint
2 4 6 8 101214161820
-180
-135
-90
-45
0
45
90
135
180
Joint Angle (Degree)
Path Point (i)
(c) Third Joint
Figure 3: Joints’ Paths of 3R Manipulator Using
Conventional Genetic Algorithm for (a) First Joint, (b)
Second Joint, and (c) Third Joint.
The oscillatory behavior of the joints’ paths
encountered in the conventional genetic algorithm is
actually due to the nature of the initialization phase,
crossover operator, and mutation operator used in
the algorithm. These three operators are applied at
the path point level in the conventional genetic
algorithm. Conventional initialization phase implies
that consecutive path points might have opposite
extreme values within the given range of the joint’s
limits. The problem of oscillatory values among
consecutive path points is emphasized when the
range of joint’s limits is extended as discussed
previously. This problem is bypassed in CGA by the
use of smooth curves in the initial population that
eliminate the possibility of highly oscillating values
among the consecutive path points.
Conventional crossover operator results in a
jump in the value of the parameter in which the
crossover point lies (discontinuity) while keeping
A COMPARATIVE STUDY BETWEEN CONVENTIONAL AND CONTINUOUS GENETIC ALGORITHMS FOR
THE SOLUTION OF CARTESIAN PATH GENERATION PROBLEMS OF ROBOT MANIPULATORS
421
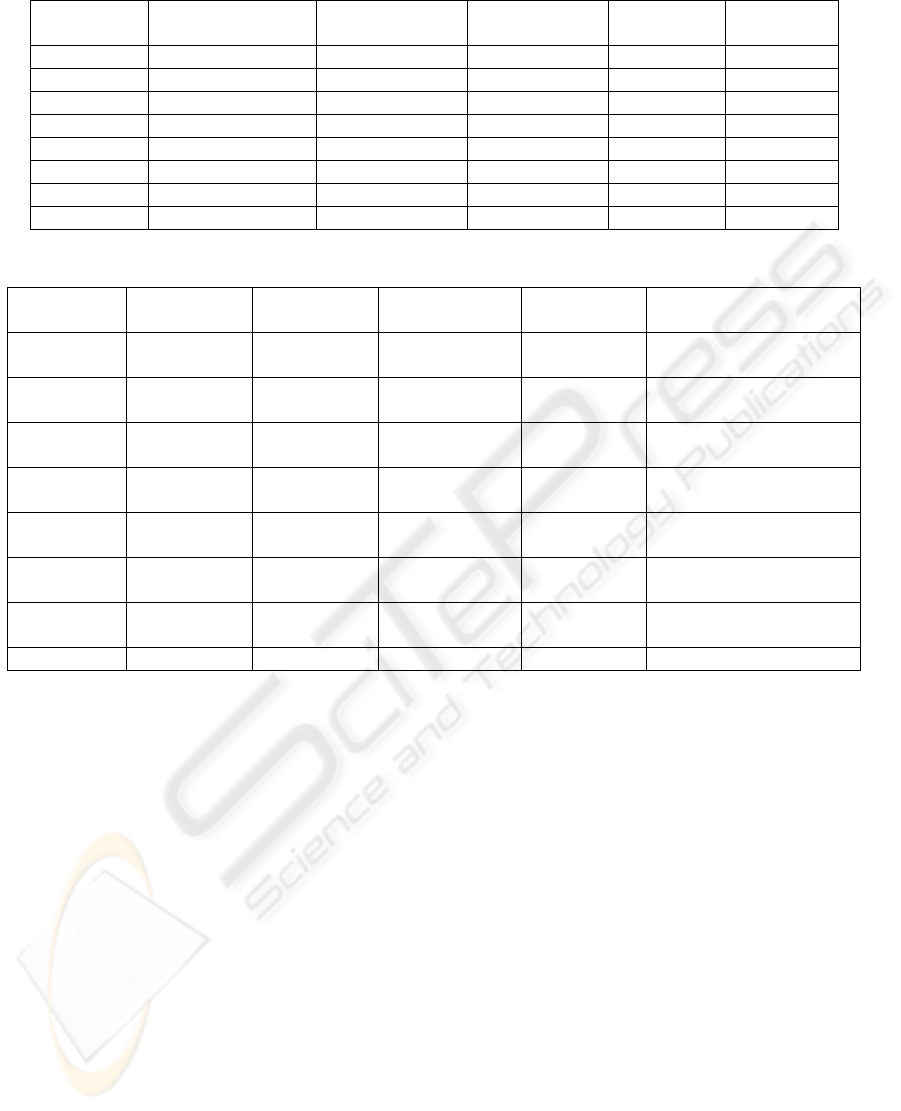
Table 1: Step-by-Step Switching to CGA for the 2R Manipulator.
Initialization
Type
Crossover Type Mutation Type
Avg. Execution
Time (Seconds)
Avg. No of
Generations
Avg. No. of
Switchings
Conventional Conventional Conventional 143.99 54 9
Conventional Conventional Continuous 160.59 57 7
Conventional Continuous Conventional 221.2 78 7
Conventional Continuous Continuous 261.44 100 2
Continuous Conventional Conventional 117.37 48 1
Continuous Conventional Continuous 109.97 49 0
Continuous Continuous Conventional 119.09 55 0
Continuous Continuous Continuous 99.11 47 0
Table 2: Step-by-Step Switching to CGA for the 3R Manipulator.
Initialization
Type
Crossover
Type
Mutation
Type
Avg. Execution
Time (Seconds)
Avg. No. of
Generations
Nature of Joints’ Paths
Conventional Conventional Conventional 487.72 124
Oscillations With Large
Magnitude
Conventional Conventional Continuous 390.06 105
Oscillations With Medium
Magnitude
Conventional Continuous Conventional 295.14 83
Oscillations With Large
Magnitude
Conventional Continuous Continuous 486.1 144
Oscillations With Medium
Magnitude
Continuous Conventional Conventional 188.89 53
Oscillations With Small
Magnitude
Continuous Conventional Continuous 191.2 56
Oscillations With Small
Magnitude
Continuous Continuous Conventional 181.57 55
Oscillations With Small
Magnitude
Continuous Continuous Continuous 148.85 49 Smooth Solution Curves
the other parameters the same or exchanged between
the two parents. It is clear that each crossing point
results in a discontinuity in the joint angles of the
obtained children. The worst case obtained regarding
the discontinuity of the resulting curves of the
children happens in the uniform crossover process.
In this scheme, the smoothness of the joint’s paths of
the parents is completely spoiled since crossover
happens at every path point. The solution to the non-
smoothness of the resulting joint’s paths is through
the use of the tangent hyperbolic crossover function
used in CGA that results in smooth transition in the
joint values of the two parents while generating the
two children.
Conventional mutation process changes only the
value of the joint angle of the path point in which
mutation occurs while keeping other joint angles in
the joint’s path unchanged. This process results in a
jump in the value of the joint angle in which
mutation takes place and the overall path will
become of oscillatory behavior. The discontinuity in
the joint’s path depends on the number of mutations
that take place in the path and the position of the bit
at which mutation takes place; that is, if the mutation
bit is leftmost, then the discontinuity will be larger
than that of rightmost mutation bit. This problem is
solved in CGA by applying the Gaussian mutation
function that is of global nature. In our approach,
mutation is applied at the joint’s path level rather
than path point level. As a result, mutation function
will start from zero values and increases/decreases
slowly till the peak then it will go back to zero
values at the other end.
After that, the effect of both versions
(conventional and continuous) of the initialization
phase, crossover operator and mutation operator on
the nature of the joints’ paths obtained and the
convergence speed of the hybrid algorithm is
studied. Table 1 gives the relevant data for the 2R
manipulator while Table 2 gives the relevant data for
the 3R manipulator. From Table 1, it is clear that the
maximum number of switching between the two
existing solutions of the inverse kinematics problem
for the 2R manipulator happens in case of the
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
422
conventional genetic algorithm (i.e., conventional
types of initialization, crossover and mutation).
Furthermore, the initialization phase has the greatest
effect on the smoothness/non-smoothness of the
solution curves; that is, in case of conventional
initialization, the number of switching points is 6 on
average while in case of continuous initialization,
the number of switching points is 0 on average. It is
also clear that as the number of conventional
processes decreases, the number of switching points
decreases. The minimum execution time and the best
convergence speed are achieved using the CGA (i.e.,
continuous types of initialization, crossover and
mutation). Regarding the 3R manipulator, it is clear
that the initialization phase has the greatest effect on
the smoothness/non-smoothness of the solution
curves; that is, in case of conventional initialization,
the joints’ paths are of oscillatory nature with large
or medium magnitude oscillations while in case of
continuous initialization, the joints’ paths are either
smooth or of oscillatory nature with small magnitude
oscillations. The minimum execution time and the
best convergence speed are achieved using the CGA
(i.e., continuous types of initialization, crossover and
mutation). For both manipulators, the conventional
initialization, continuous crossover and continuous
mutation case results in the largest number of
generations required for convergence. Regarding the
case in which the conventional initialization,
continuous crossover and conventional mutation are
used which is almost similar to the algorithm
proposed by Davidor, it is observed that this hybrid
scheme still results in oscillations with large
magnitude as shown in Table 2. This is an expected
result since the smoothness achieved by the
continuous crossover process is disturbed by the
conventional mutation process. This goes in
agreement with our previous comments about his
algorithm that even after the application of the
analogous crossover operator, the oscillatory
behavior of the joints’ paths is not totally avoided
due the discontinuities, which might appear in the
initialization phase and due to the mutation operator.
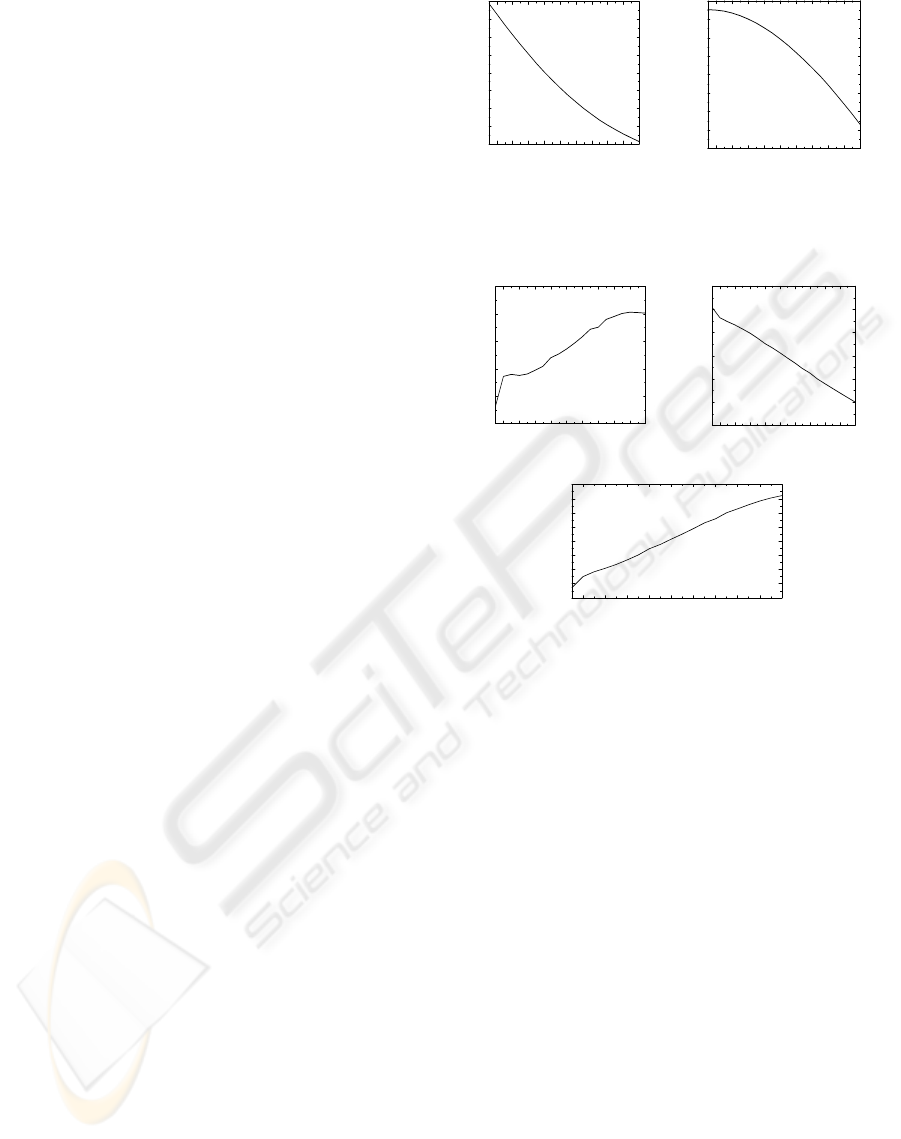
The joints’ paths for the first and second joints of
the 2R manipulator using CGA are shown in Figure
4. It is obvious that the resulting solution curves in
joint space are smooth and do not have any
switching between the two possible solutions, which
results in minimizing the net displacement of the
joints. The joints’ paths for the first, second and
third joints of the 3R manipulator are shown in
Figure 5 where similar observations are concluded
regarding the smoothness of the solution curves.
2 4 6 8 101214161820
-25
-20
-15
-10
-5
0
5
10
15
Joint Angle (Degree)
Path Poi nt ( i)
2 4 6 8 10 12 14 16 18 20
136
138
140
142
144
146
148
150
152
Joint Angle (Degree)
Pat h Point (i)
(a) First Joint (b) Second Joint
Figure 4: Joints’ Paths of 2R Manipulator Using CGA for
(a) First Joint, and (b) Second Joint.
2 4 6 8 10 12 14 16 18 20
-30
-25
-20
-15
-10
-5
Joint Angle (Degree)
Path Poi nt ( i)
2468101214161820
60
70
80
90
100
110
120
Joint Angle (Degree)
Pat h Point (i)
(a) First Joint (b) Second Joint
2468101214161820
95
100
105
110
115
120
125
130
135
Joint Angle (Degree)
Path Point (i)
(c) Third Joint
Figure 5: Joints’ Paths of 3R Manipulator Using CGA for
(a) First Joint, (b) Second Joint, and (c) Third Joint.
5 CONCLUSIONS
In this work, both of the continuous and the
conventional genetic algorithms were used for the
solution of the Cartesian path generation problems
of robot manipulators.
It was noted that the resulting joints’ paths using
conventional genetic algorithm have multiple
switching points among the possible solutions of the
non-redundant manipulators while they are of highly
oscillatory nature for the redundant manipulators
resulting in very large net displacements of the joints
for both systems. This oscillatory behavior in
conventional genetic algorithm is actually due to the
nature of the initialization phase, crossover operator,
and mutation operator used in the algorithm. First,
the conventional initialization phase results in
consecutive path points that might have opposite
extreme values within the given range of the joints’
limits. Second, the conventional crossover operator
results in a jump in the value of the parameter in
A COMPARATIVE STUDY BETWEEN CONVENTIONAL AND CONTINUOUS GENETIC ALGORITHMS FOR
THE SOLUTION OF CARTESIAN PATH GENERATION PROBLEMS OF ROBOT MANIPULATORS
423

which the crossover point lies, while keeping the
other parameters the same or exchanged between the
two parents. Third, the conventional mutation
process changes only the value of the joint angle of
the path point in which the mutation occurs while
keeping other joint angles in the joint’s path
unchanged. The resulting discontinuity in the joint’s
path depends on the number of mutations that take
place in the path and the position of the bit at which
mutation takes place. These three operators are
designed in CGA such that they result in smooth
joints’ paths from one side and maintain an excellent
accuracy along the Cartesian path from the other
side. Among the three operators, it was noted that
the initialization phase has the greatest effect on the
smoothness/non-smoothness of the joints’ paths. The
convergence speed of the CGA in terms of both the
number of generations required for convergence and
the average execution time is much superior to that
of the conventional genetic algorithm.
REFERENCES
Abo-Hammour, Z., Mirza, N., Arif, M., 2002. Cartesian
Path Planning of Robot Manipulators Using
Continuous Genetic Algorithms. In Robotics and
Autonomous Systems; 41(4):179-223.
Abo-Hammour, Z., 2005. A Novel Continuous Genetic
Algorithms For the Solution of the Cartesian Path
Generation Problem of Robot Manipulators. In Robot
Manipulators.
Abo-Hammour, Z., 2002. Advanced continuous genetic
algorithms and their applications in the motion
planning of robotic manipulators and the numerical
solution of boundary value problems; Ph.D. thesis.
Davidor, Y., 1991. Genetic Algorithms and Robotics: A
Heuristic Strategy for Optimization, World Scientific.
Goldberg, D., 1989. Genetic Algorithms in Search,
Optimization, and Machine Learning, Addison -
Wesley, New York.
Holland, J., 1975. Adaptation in Natural and Artificial
Systems, University of Michigan Press, Ann Arbor.
Parker, J., Koogar, A., and Goldberg, D., 1989, Inverse
Kinematics of Redundant Robots Using Genetic
Algorithms, In IEEE Conference on Robotics and
Automation.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
424
