
TRANSITION VELOCITY FUNCTION
FOR IMPULSE CONTROL SYSTEMS
Stephen van Duin
1
, Matthias Ahlswede
2
and Christopher D. Cook
1
1
Faculty of Engineering, University of Wollongong, Northfields Avenue, Gwynnville, Australia
2
Institute of Production Engineering and Machine Tools, Leibniz University Hannover, Hannover, Germany
Keywords: Impulsive Control, Static Friction, Limit Cycle, Stick-slip, Impulse Shape, Friction Model, Accuracy.
Abstract: This paper presents a modified impulse controller that is used to improve the velocity tracking of a
servomechanism having characteristics of high nonlinear friction. A hybrid control scheme consisting of a
conventional PID part and an impulsive part is used as a basis to the modified controller. This has
previously been used to improve the position and velocity tracking of robot manipulators at very low
velocities. Experiments show that at higher velocities the improved performance of the impulse part of the
hybrid controller diminishes and can be counterproductive at these speeds when compared to conventional
PID control alone. The modified hybrid impulse controller in this paper uses a mathematical function to
transition the amount of torque from an impulse as a function of velocity to achieve more precise tracking
across a range of velocities.
1 INTRODUCTION
Precision robot manufacturers continually strive to
increase the accuracy of their machinery in order to
remain competitive. The ability of a robot
manipulator to position its tool centre point to within
a very high accuracy allows the robot to be used for
more precise tasks. For positioning of a tool centre
point, the mechanical axes of a robot will be
required to be precisely controlled around zero
velocity where friction is highly non-linear and
difficult to control. Furthermore, precise velocity
control at high velocities is typically required for
increased productivity. Each axis of a robot is
typically controlled by a servomechanism and this
paper deals with improving the control of these basic
robot components in the presence of friction.
Nonlinear friction is inherently present in all
mechanisms and can cause stick-slip during precise
positioning. In many instances, stick-slip has been
reduced or avoided by modifying the mechanical
properties of the system; however this approach may
not always be practical or cost effective.
Alternatively, advances in digital technology have
made it possible for the power electronics of
servomechanisms to be controlled with much greater
flexibility. By developing better controllers, the
unfavourable effects of non-linear friction may be
reduced or eliminated completely.
Impulse control has been successfully used for
accurate positioning of servomechanisms with high
friction where conventional control schemes alone
have difficulty in approaching zero steady state
error. Static and Coulomb friction can cause a
conventional PID controller having integral action
(I), to overshoot and limit cycle around the reference
position. This is particularly a problem near zero
velocities where friction is highly non linear and the
servomechanism is most likely to stick-slip. Despite
the above difficulties, PID controllers are still
widely used in manufacturing industries because of
their relative simplicity and reasonable robustness to
parameter uncertainty and unknown disturbances.
Stick-slip can be reduced or eliminated by using
impulsive control near or at zero velocities. The
impulsive controller is used to overcome static
friction by impacting the mechanism and moving it
by microscopic amounts. By combining the
impulsive controller and conventional controller the
PID part can be used to provide stability. Moving
towards the reference position the impulse controller
is used to improve accuracy for the final positioning
where the error signal is small.
213
van Duin S., Ahlswede M. and Cook C. (2009).
TRANSITION VELOCITY FUNCTION FOR IMPULSE CONTROL SYSTEMS .
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 213-221
DOI: 10.5220/0002207402130221
Copyright
c
SciTePress
By applying a short impulse of sufficient force,
plastic deformation occurs between the asperities of
mating surfaces resulting in permanent controlled
movement. If the initial pulse causes insufficient
movement, the impulsive controller produces
additional pulses until the position error is reduced
to a minimum.
A number of investigators have devised
impulsive controllers which achieve precise motion
in the presence of friction by controlling the height
or width of a pulse. Yang and Tomizuka (Yang et
al., 1988) applied a standard rectangular shaped
pulse in which the height of the pulse was a force 3
to 4 times greater than the static friction to guarantee
movement. The width of the pulse was adaptively
adjusted proportional to the error and was used to
control the amount of energy required to move the
mechanism towards the reference position.
Alternatively, Popovic (Popovic et al., 2000)
described a fuzzy logic pulse controller that
determined both the optimum pulse amplitude and
pulse width simultaneously using a set of
membership functions. Hojjat and Higuchi (Hojjat et
al., 1991) limited the pulse width to a fixed duration
of 1ms and varied the amplitude by applying a force
about 10 times the static friction.
In a survey of friction controllers by Armstrong-
Hélouvry (Armstrong- Hélouvry et al., 1994), it is
commented that underlying the functioning of these
impulsive controllers is the requirement for the
mechanism to be in the stuck or stationary position
before subsequent impulses are applied. Thus,
previous impulse controllers required each small
impacting pulse to be followed by an open loop slide
ending in a complete stop.
van Duin (van Duin et al., 2006), used a hybrid
PID + Impulsive controller to improve the precision
of a robot manipulator arm in the presence of static
and Coulomb friction. The design and functioning of
the controller does not require the mechanism to
come to rest between subsequent pulses, making it
suitable for both point-to-point positioning and
speed regulation. van Duin (van Duin et al., 2006)
manipulated the pulse shape to match the dynamic
friction by making this shape responsive to very
small changes in velocity.
The error in positioning during different tracking
tasks at zero and low velocities was greatly
improved. However, further experiments showed
that the PID + Impulse controller had greater errors
at high velocities compared to a simple PID
controller alone.
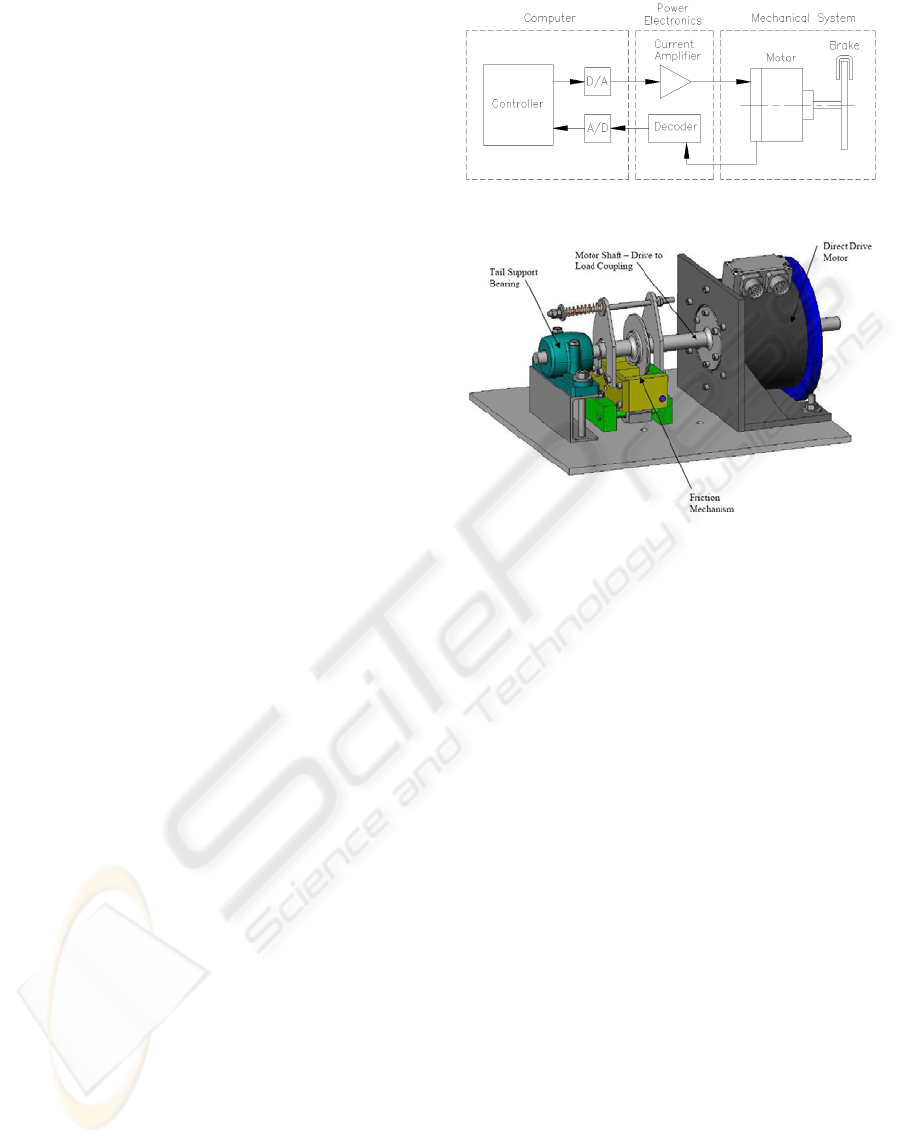
Figure 1: Experimental friction test bed.
Figure 2: Three dimensional drawing of the friction test
bed.
This paper presents a modified impulse
controller where the impulsive part of the hybrid
PID + Impulse controller is gradually disabled at
higher velocities so that the conventional linear PID
part is eventually solely providing the driving
torque. It is shown that at greater velocities, the
static and Coulomb friction is less influential and
that the system is more dominated by the relatively
linear viscous frictional effects. Using a transition
function the performance is shown to be improved
for both low and high velocities, while maintaining
system stability.
2 EXPERIMENTAL SYSTEM
2.1 Servomechanism
For these experiments a purpose built single axis
friction test-bed was used to simulate the conditions
typically observed in an industrial robot arm.
Figures 1 and 2 show the experimental friction
test bed system that consists of a single axis direct
drive servomechanism actuator coupled to a friction
generating disk brake. Torque is transmitted by the
actuator to the friction mechanism through a direct
coupled shaft to eliminate the presence of backlash,
gear cogging, belt cogging etc. Direct drive isolates
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
214
the friction characteristics; however, the impulse
control systems in this paper have been repeated on
a Hirata ARi350 SCARA robot with comparable
results.
Position data is obtained from a shaft encoder
housed within the motor and has a maximum
resolution of 2
19
counts per revolution or 1.198e-5
rad/count. Digital torque control of the motor is
achieved using a three phase direct drive servo
amplifier.
Matlab’s xPC target oriented server was used to
provide control to the servomechanism drive. For
these experiments the digital drive was used in
current control mode. This means the output voltage
from the 12-bit D/A converter gives a torque
command to the actuator’s power electronics, which
has a time constant of 0.1ms.
The system controller was compiled and run using
Matlab’s real time xPC Simulink® block code.
2.2 Hybrid PID + Impulse Controller
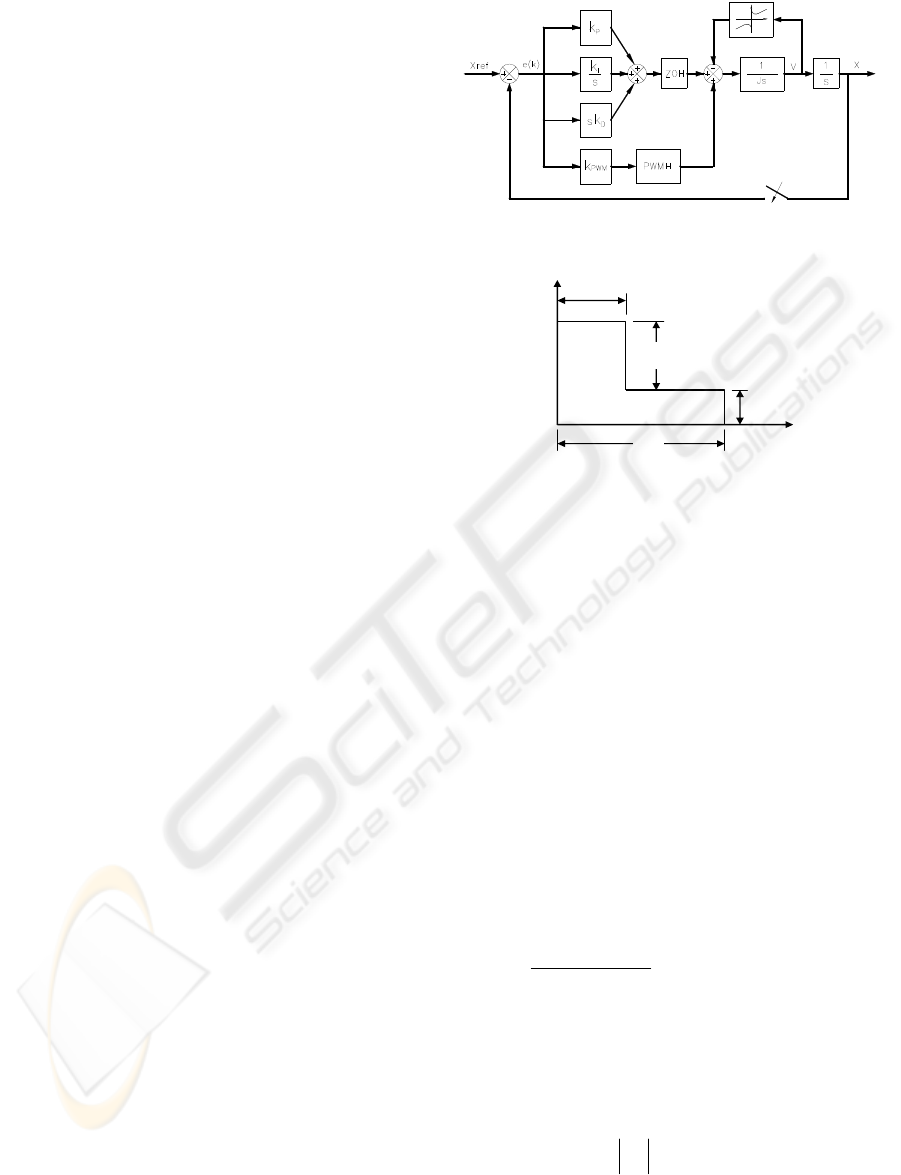
Figure 3 shows the block diagram of a PID linear
controller + impulsive controller. This hybrid
controller has been suggested by Li (Li et al., 1998)
where the PID driving torque and impulsive
controller driving torque are summed together. It is
unnecessary to stop at the end of each sampling
period; therefore, the controller can be used for both
position and speed control.
The controller can be divided into two parts; the
upper part is the continuous driving force for large
scale movement and control of external force
disturbances. The lower part is an additional
proportional controller k
pwm
with a pulse width
modulated sampled-data hold (PWMH), and is the
basis of the impulsive controller for the control of
stick-slip.
The system controller is sampled at 2 kHz. The
impulse itself is sampled and applied at one
twentieth of the overall sampling period (i.e. 100
Hz) to match the mechanical system dynamics.
Figure 4 shows a typical output of the hybrid
controller for one impulse sampling period
τ
s
. The
pulse with a height f
p
is added to the PID output.
Because the PID controller is constantly active, the
system has the ability to counteract random
disturbances applied to the servomechanism. The
continuous part of the controller is tuned to react to
large errors and high velocity, while the impulse part
is optimized for final positioning where stiction is
most prevalent.
Figure 3: Block diagram of the experimental system
controller.
F
o
r
ce
Δ
fp
PID
Output
τ
s
Figure 4: Friction controller output.
For large errors, the impulse width approaches
the full sample period
τ
s
, and for very large errors, it
transforms into a continuous driving torque. When
this occurs, the combined control action of the PID
controller and the impulsive controller will be
continuous. Conversely, for small errors, the PID
output is too small to have any substantial effect on
the servomechanism dynamics.
The high impulse sampling rate, combined with a
small error, ensures that the integral (I) part of the
PID controller output has insufficient time to rise
and produce limit cycling. To counteract this loss of
driving torque, when the error is below a threshold,
the impulsive controller begins to segment into
individual pulses of varying width and becomes the
primary driving force. One way of achieving this is
to make the pulse width Δ determined by:
p
spwm
f
kek
τ
)(
⋅
=Δ if |||)(|k
pwm p
fke ≤⋅
s
τ
=
Δ
otherwise (1)
In (1)
()
()
pp
f
fsignek=⋅
(2)
where e(k) is the error input to the controller, |f
p
| is a
fixed pulse height greater than the highest static
TRANSITION VELOCITY FUNCTION FOR IMPULSE CONTROL SYSTEMS
215
friction and
τ
s
is the overall sampling period.
For the experimental results described in this
paper, the impulsive sampling period
τ
s
was 10ms
and the pulse width could be incrementally varied by
1ms intervals. The pulse width gain k
pwm
, is
experimentally determined by matching the
mechanism’s observed displacement d to the
calculated pulse width t
p
using the equation of
motion:
2
()
2
pp C
p
C
ff f
dt
mf
−
=
, f
p
> 0 (3)
The gain is iteratively adjusted until the net
displacement for each incremental pulse width is as
small as practical.
To further improve the performance of the
controller, van Duin (van Duin et al., 2006) use a
modified impulse shape to better counteract the
dynamics of friction. To overcome stiction, it is
necessary to have an initial driving force greater
than the static friction. Immediately after motion
begins, the opposing friction reduces dramatically
and, if motion continues, will be maintained at the
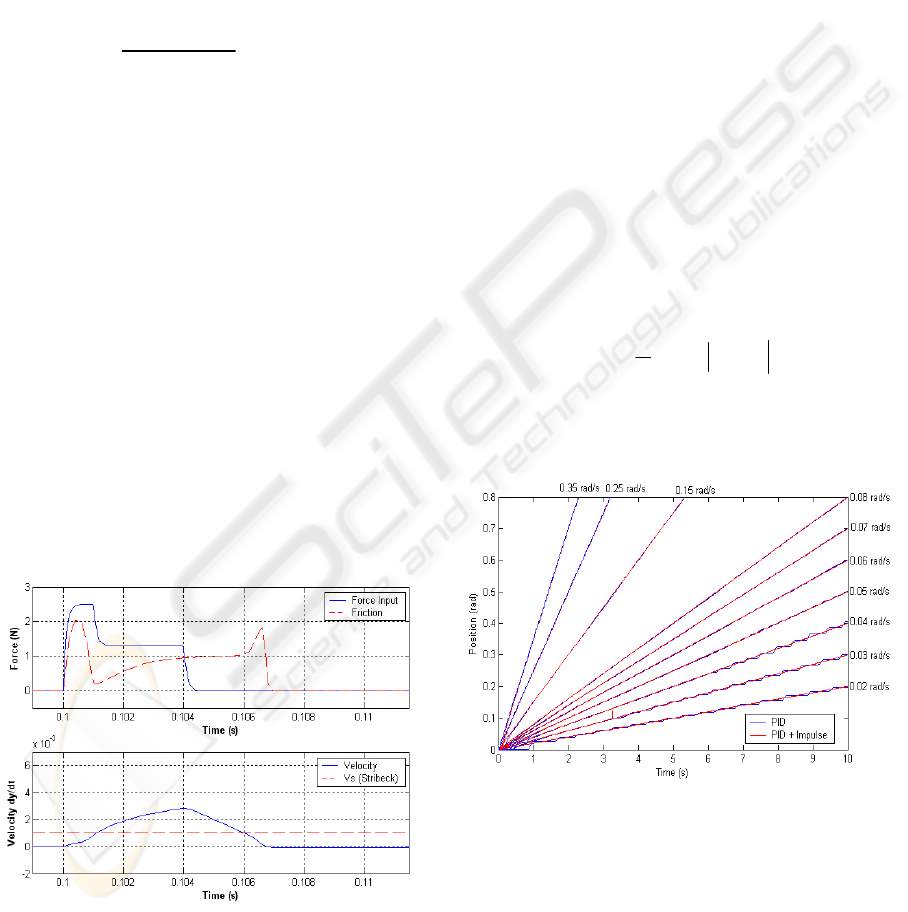
Coulomb friction value. Figure 5 shows most of the
effective energy of the pulse commences
immediately after the static friction dissipates and
therefore the remaining pulse height after an initial
start-up pulse can be reduced much less than that
required to initiate motion.
This type of pulse was used for the experiments
in this paper.
Figure 5: Modified pulse with 2ms start up pulse to
overcome static friction and initiate motion.
2.3 Performance at Very Low to High
Velocity Regimes
This section investigates how the hybrid PID +
impulse controller performs at higher velocities
exceeding the Stribeck threshold of approximately
.09 rads. For this region of velocities, the highly non
linear static and negative viscous friction
components are substantially reduced relative to the
total and the Coulomb and viscous frictions become
the dominant resisting friction. For these velocities,
the conventional linear PID controller is well suited.
Subsequently, the addition of an impulse torque
request may be deleterious to the servomechanism’s
performance in the region of higher velocity.
Figure 6 shows a series of varying ramp
responses from 0.02 rad/s up to 0.35 rad/s using the
friction test bed. The range of speeds ensures that
the mechanism is operating in both the nonlinear and
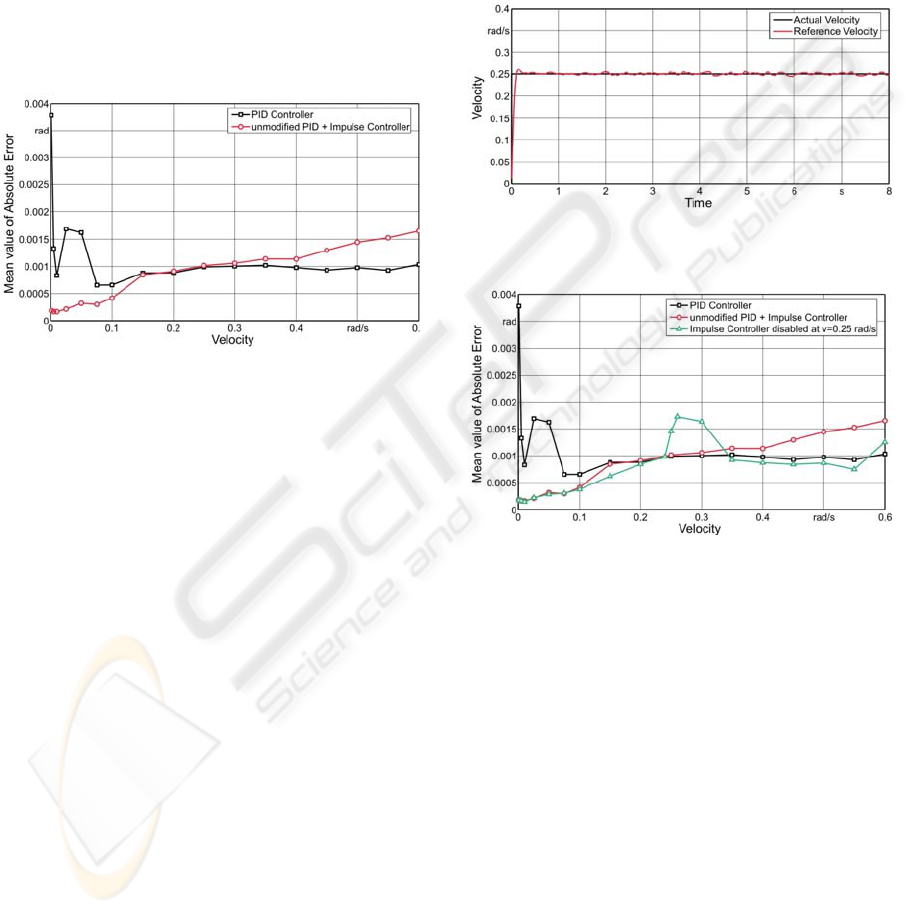
linear friction regions. Figure 7 compares the Mean
Value of the Absolute Error (MAE) for each speed
from 7 to 10 seconds respectively. A standard form
for MAE is (Ogata, 1990):
()
∑
=
−=
n
i
i
xx
n
MAE
1
1
(4)
Where n is the number of data points, x
i
is the
mechanism position, and x is the reference position.
Figure 6: Tracking response for the friction test bed using
PID and PID + impulse controllers for varying position
ramps (0.02 rad/s to 0.35 rad/s).
For the velocities below the Stribeck velocity
threshold, the hybrid PID + impulse controller
significantly outperforms the conventional PID
controller. However, as the velocity increases, the
mean errors of both the PID and PID + impulse
controllers begin to converge (ω≈0.15rad/s), and at a
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
216
critical velocity above the Stribeck region, the PID
controller becomes more precise. This increase in
precision for the PID controller can be expected
since for this higher range of velocities, a
conventional linear PID controller will sufficiently
counteract the linear fiction without the need of any
additional torque. These experiments show that
combining the impulse action for high range
velocities can be unnecessary and in some instances
counterproductive. One way to avoid this loss of
performance using a hybrid controller is to disable
the impulse torque request at higher velocities to
allow the PID part to work autonomously.
Figure 7: Mean value of the absolute error for each of the
position tracking ramps shown in Figure 6 for the period 7
– 10 seconds.
3 TRANSITION VELOCITY
CONTROLLER
This section evaluates a series of transition velocity
controller functions which disable or limit the
impulsive controller above the critical Stribeck
velocity.
3.1 On/Off Control using the Critical
Velocity
Here the controller’s impulsive part is switched off
at the critical velocity. The set of conditions for
which this occurs is simply defined by the
following:
If
≤)(vy critical velocity, then the impulse
force
p
f
= constant
(5)
Otherwise
zerof
p
=
Where y(v) is determined by differentiating the
mechanism’s actual position.
The initial assumption was that this action would
make the system unstable at this moment. Close
inspection of a velocity tracking task (Figure 8)
confirms the mechanism cyclically overshooting and
undershooting. This results in the error of the
position tracking task increasing for the critical
velocity and velocities nearby. This can be seen in
Figure 9 between the velocity range of 0.25 and 0.35
rad/s.
Figure 8: Velocity response when tracking defined
disabling velocity of v=0.25 rad/s.
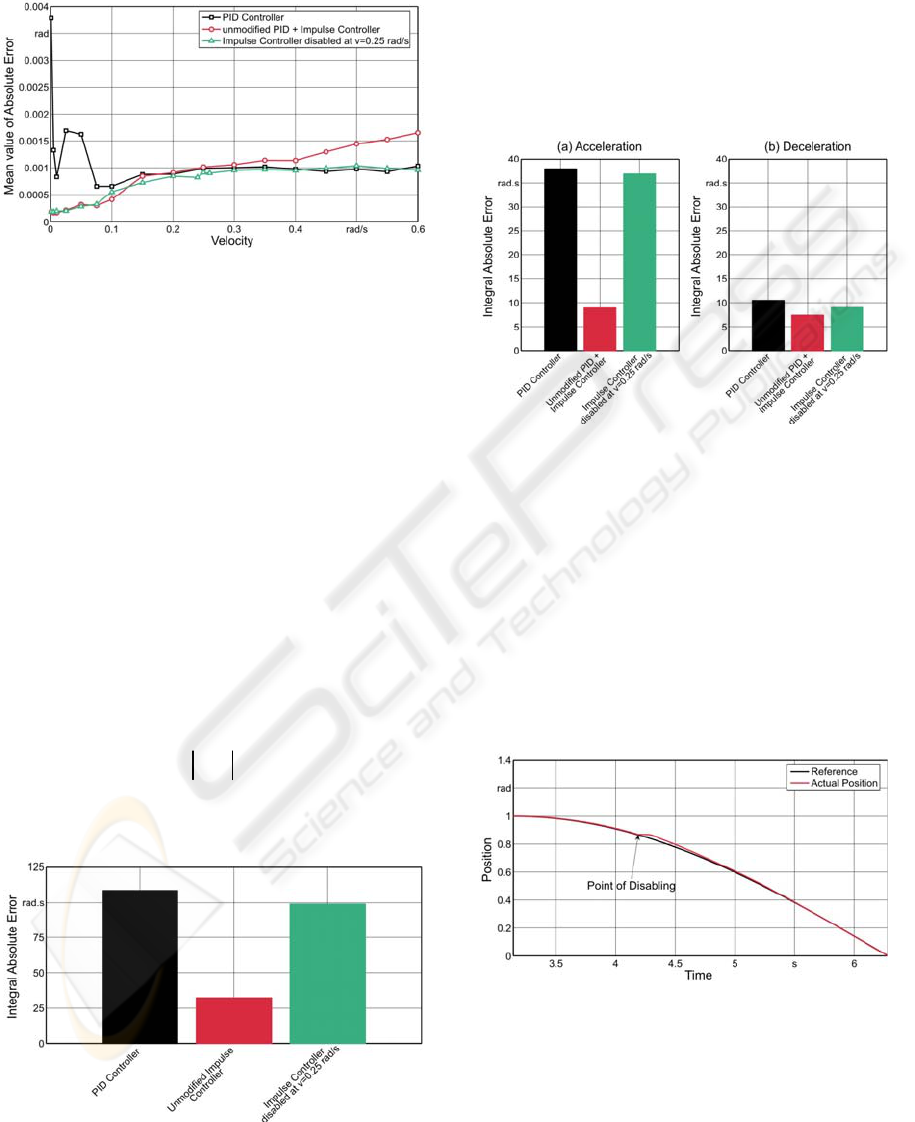
Figure 9: Mean value of the absolute error of the
unmodified controllers and the modified PID plus Impulse
controller with a disabled impulsive part with respect to
the actual velocity.
The loss of torque from the impulsive controller
immediately affects the mechanism and the PID
controller cannot counteract this quickly enough.
The loss of torque causes the velocity to drop under
the critical velocity and the impulsive part is
immediately enabled again. This makes the system
unstable and the controller cyclically enables and
disables the impulse controller. However, at
velocities above this transition region the position
tracking error is consistent with the PID only
controller, as expected.
It is clear that using only servomechanism
velocity output as a function to control the transition,
cannot be an option if tracking accuracies near
critical velocities are to be maintained. A solution to
this is to transition the controller as a function of
TRANSITION VELOCITY FUNCTION FOR IMPULSE CONTROL SYSTEMS
217
reference velocity rather than system velocity as
shown in Figure 10.
Figure 10: Mean value of the absolute error of the
unmodified controllers and the modified PID plus Impulse
controller with a disabled impulsive part with respect to
the reference velocity.
3.2 Sinusoidal Reference Position
Tracking
To further trial the modified controller, an additional
experiment tested the system’s ability to track
changing velocities that pass through the critical
velocity regime. In this case, a sinusoidal position
reference ensures a continuous change in
velocities for both positive and negative
accelerations. By using the Integral Absolute Error
(IAE) criterion, the error of a statistically relevant
series of position trace experiments can be
calculated, and a performance measure between each
controller established. A standard measure is given
by (Ogata, 1990):
0
()et dt
∞
∫
(6)
Where e(t) is the error with respect to time t.
Figure 11: The IAE of the unmodified controllers and the
on/off modified controller.
Figure 11 shows a comparison of the results
where there is clearly no improvement in accuracy
for the modified PID + impulse controller over the
original hybrid controller for these conditions of
changing velocity. A subsequent breakdown of the
error with respect to time shows in Figure 12 that the
modified controller mostly counter-performs during
acceleration but also partly during deceleration.
Figure 12: The IAE of the unmodified controllers and the
on/off modified controller during (a) acceleration; and (b)
deceleration while tracking the sinusoidal position curve.
A closer examination of the position trace
(Figure 13) shows that the loss of torque during the
point of disabling creates a torque deficiency which
the conventional PID controller struggles to correct
in a reasonable time frame. A proposed solution to
this is to replace the instantaneous on/off switching
function with a linear decaying ramp so that abrupt
impulse torque removal is avoided and instead
gradually transitioned.
Figure 13: Comparison of the reference and actual position
during acceleration while tracking a sinusoidal position
input.
3.3 Transition Velocity Function
A solution to transitioning the impulse torque output
from unity gain to zero, is given by the following
simple linear function:
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
218
()yv a v b=⋅+ (7)
Where v is the reference velocity of the system
and the constants a and b are experimentally
determined by trial over a range of velocities either
side of the system’s critical velocity.
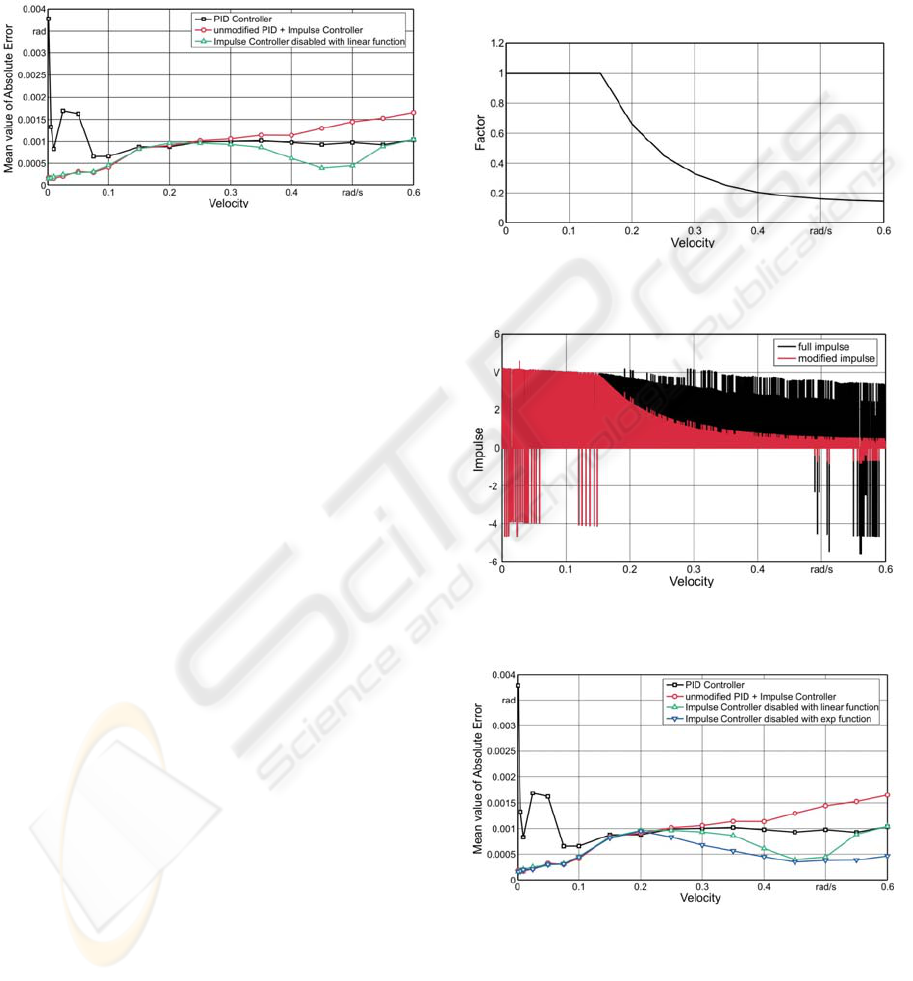
Figure 14: MAE for constant velocity position tracking
tasks for the unmodified and linear function transitional
impulse controllers.
Figure 14 compares the MAE for each controller.
Surprisingly, the linear transition function even
improves the accuracy in position at the intermediate
higher velocities before the impulse torque is fully
transitioned to zero. This improved performance
shows that the controller accuracy can be noticeably
improved by limiting the pulse height at higher
velocities instead of disabling it.
Subsequently, a new function with modified
requirements was determined. The function
provides:
• A fast reduction in pulse height matched to the
PID sampling rate when switching from full to
partial impulse control;
• Rather than disabling the full impulse
completely it instead reduces it to a fraction of
the original pulse height;
• Control over the magnitude of impulse for
either acceleration or deceleration regimes.
All of these requirements can be realised with an
exponential function. The basic equation used was:
cevy
bva
+=
− )(
)( (8)
The parameter a was chosen to be -10 as the
exponential function should be designed to have a
negative slope that simultaneously reduces the
impulse height rapidly. The parameters b and c are
determined through boundary conditions as follows:
1)15.0(
)(10
=+==
−−
cevy
bv
(9)
25.0)35.0(
)(10
=+==
−−
cevy
bv
(10)
Solving these equations gives:
1326.0)(
)1358.0(10
+=
−− v
evy (11)
Where v is the reference velocity given by the
tracking task. The boundary conditions are selected
by trial using a range of varying pulse heights.
Figure 15: Exponential function for transitioning the
limiting of the impulse torque with respect to velocity.
Figure 16: Typical controller torque command for a full
impulse and modified impulse applied to friction test bed.
Figure 17: MAE for constant velocity position tracking
tasks for the unmodified and transitional impulse
controllers.
Figure 15 shows a graphical representation of the
exponential function, while Figure 16 gives an
example of a typical controller torque command.
TRANSITION VELOCITY FUNCTION FOR IMPULSE CONTROL SYSTEMS
219
The exponential function was shown to provide a
significant improvement in the accuracy of velocity
tracking (Figure 17). However, further velocity
tracking experiments showed that the improvement
can only be achieved when tracking constant
velocities and is particularly counterproductive
during acceleration and varying deceleration. This is
caused by the insufficient response of the controller
to change the pulse height relative to the rapid
changes in velocity.
A solution for ensuring a smooth transition
between different tracking tasks with different pulse
heights is a time dependant exponential function
with additional conditions. If F
1
is the factor
determined by the modification done in the previous
section, the requirements for the new function are as
follows:
1
1
)0(
F
tf ==
(12)
1)(
=
∞=tf (13)
This leads to the following equation:
1)(
1
1
ln5.0
1
+=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+×−
F
t
etf
(14)
Multiplying this equation with Equation 11 gives
a smooth transition between the full impulse height
during the acceleration and the fraction of the pulse
height during constant velocity after acceleration.
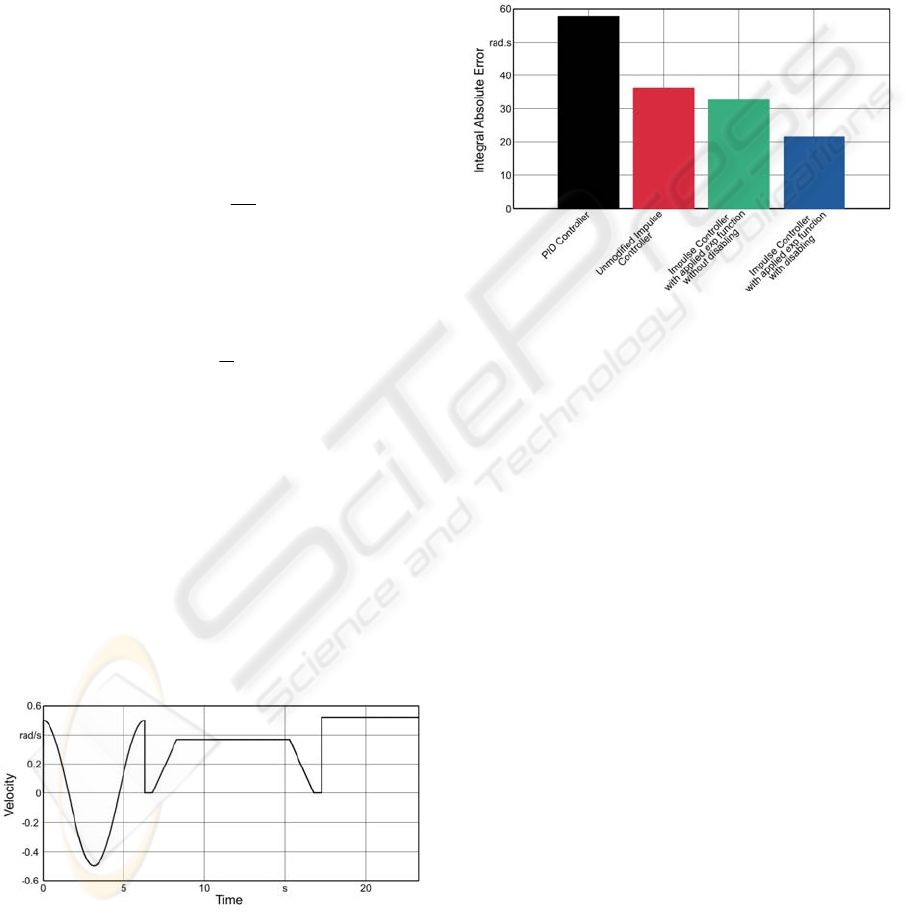
To compare each controller for a range of conditions
and to test the controller’s stability, a varying
position tracking experiment was devised with the
resulting trace shown in Figure 18. This trajectory
was chosen as a demanding trajectory including
several velocity reversals and various velocity
gradients.
Figure 18: Position tracking task for testing stability.
After repeating the experiments for each
controller, the IAE criterion was used to compare
each controller and the results shown in Figure 19.
The results clearly show a marked improvement in
the overall accuracy of the system when using the
impulse controller with a time varying exponential
function to transition the impulse torque during
acceleration and deceleration. Furthermore, the
results show that the controllers are robust enough to
remain stable over the fairly demanding range of
reference conditions tested.
Figure 19: The IAE for the velocity tracking using the
unmodified controller, exponential function and
exponential function with time varying transition.
3.4 Discussion of Results
This set of results demonstrates the impulse
transitional velocity function can be successfully
applied to a servomechanism, having characteristics
of high non-linear friction. The results show that the
unmodified impulse controller significantly
outperforms the conventional PID controller at very
low velocities. However, as the velocity increases,
the mean errors of both the PID and PID + impulse
controllers begin to converge above the Stribeck
region and the PID controller becomes more precise.
By applying an exponential function which
includes consideration of time dependent boundary
conditions, the impulse controller can be
transitionally reduced to exploit the robustness of a
conventional PID controller at higher velocities
where viscous friction dominates.
A comparison of the Mean Value of the Absolute
Error and the Integral of the Absolute Error for each
controller shows that the impulse controller with the
velocity dependant exponential function for impulse
torque transitioning achieved a more precise result.
This controller was proven to be robust enough to
maintain stability during a rigorous position tracking
task.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
220

4 CONCLUSIONS
Advances in digital control have allowed the power
electronics of servo amplifiers to be manipulated in
a way that will improve servomechanism precision
without modification to the mechanical plant.
A previously developed hybrid PID + Impulse
controller which does not require the mechanism to
come to a complete stop between pulses has been
modified to further improve accuracy in the presence
of stick-slip friction. This modification transitions
the decay of the impulse torque command at higher
velocities. Many experimental tests showed that this
innovation provided substantial additional
improvement in the mechanism’s position accuracy
in comparison with other control strategies. This has
been demonstrated on a servomechanism which is
typical of those used to control each axis of
industrial mechanisms such as a robot arm.
Future work is proceeding on optimising the
parameters using a method generic to any
mechanism, which does not rely on trial and error
and is applicable to a greater rang of trajectories.
REFERENCES
Armstrong-Hélouvry, B., 1991, “Control of Machines with
Friction” Kluwer Academic Publishers, 1991, Norwell
MA.
Armstrong-Hélouvry, B., Dupont, P., and Canudas de
Wit, C., 1994, “A survey of models, analysis tools and
compensation methods for the control of machines
with friction” Automatica, vol. 30(7), pp. 1083-1138.
Canudas de Wit, C., Olsson, H., Åström, K. J., 1995 ”A
new model for control of systems with friction” IEEE
Tansactions on Automatic Control, vol. 40 (3), pp.
419-425.
Dahl, P., 1968, “A solid friction model” Aerospace Corp.,
El Segundo, CA, Tech. Rep. TOR-0158(3107-18)-1.
Dahl, P, 1977, “Measurement of solid friction parameters
of ball bearings” Proc. of 6
th
annual Symp. on
Incremental Motion, Control Systems and Devices,
University of Illinois, ILO.
Hojjat, Y., and Higuchi, T., 1991 “Application of
electromagnetic impulsive force to precise
positioning” Int J. Japan Soc. Precision Engineering,
vol. 25 (1), pp. 39-44.
Johannes, V. I.., Green, M.A., and Brockley,C.A., 1973,
“The role of the rate of application of the tangential
force in determining the static friction coefficient”,
Wear, vol. 24, pp. 381-385.
Johnson, K.L., 1987, “Contact Mechanics” Cambridge
University Press, Cambridge.
Kato, S., Yamaguchi, K. and Matsubayashi, T., 1972,
“Some considerations of characteristics of static
friction of machine tool slideway” J. o Lubrication
Technology, vol. 94 (3), pp. 234-247.
Li, Z, and Cook, C.D., 1998, ”A PID controller for
Machines with Friction” Proc. Pacific Conference on
Manufacturing, Brisbane, Australia, 18-20
August,
1998, pp. 401-406.
Ogata, K., Modern Control Engineering. 1990,
Englewood Cliffs, New Jersey: Prentice Hall.
Olsson, H., 1996, “Control Systems with Friction”
Department of Automatic Control, Lund University,
pp.46-48.
Popovic, M.R., Gorinevsky, D.M., Goldenberg, A.A.,
2000, “High precision positioning of a mechanism
with non linear friction using a fuzzy logic pulse
controller” IEEE Transactions on Control Systems
Technology, vol. 8 (1) pp. 151-158.
Rabinowicz, E., 1958, “The intrinsic variables affecting
the stick-slip process,” Proc. Physical Society of
London, vol. 71 (4), pp.668-675.
Richardson, R. S. H., and Nolle, H., 1976, “Surface
friction under time dependant loads” Wear, vol. 37
(1), pp.87-101.
van Duin, S., 2006, “Impulse Control Systems for
Servomechanisms with Nonlinear Friction”, Ph.D.
dissertation, University of Wollongong.
van Duin, S, Cook, C., Li, Z., Alici, G., 2007, “A modified
impulse controller for Improved Accuracy of Robots
with Friction”, Proceedings International Conference
on Informatics in Control, Automation and Robotics,
Angers, France.
Yang, S., Tomizuka, M., 1988, “Adaptive pulse width
control for precise positioning under the influence of
stiction and Coulomb friction” ASME J .od Dynamic
Systems, Measurement and Control, vol. 110 (3), pp.
221-227.
TRANSITION VELOCITY FUNCTION FOR IMPULSE CONTROL SYSTEMS
221
