
REAL TIME OBJECT DELIMITERS EXTRACTION FOR
ENVIRONMENT REPRESENTATION IN DRIVING SCENARIOS
Andrei Vatavu, Sergiu Nedevschi and Florin Oniga
Computer Science Department, Technical University of Cluj-Napoca, 26-28 G. Baritiu Street, Cluj-Napoca, Romania
Keywords: Contour Tracing, Environment Representation, Border Scanning, Environment Perception, Polyline
Extraction, Object Delimiters.
Abstract: The environment representation is essential for driving assistance. However, the performances achieved in
complex environments are still unsatisfactory regarding the accuracy, confidence and real time capabilities.
This paper presents a real-time 2.5D environment representation model, for driving scenarios, based on
object delimiters extraction from a 3D occupancy grid obtained from dense stereo. We propose two
approaches to extract the polyline delimiters: an improved contour tracing called 3A Tracing and a polyline
extraction method through the occupancy grid radial scanning. The advantages and drawbacks for each of
these methods have been discussed.
1 INTRODUCTION
In the context of in-vehicle navigation systems, the
environment perception and its convenient
representation is an important requirement (Pijpers,
2007). The process of environment representation
building has to be accurate and characterized by a
low computational cost.
Usually, the Driving Assistance Applications
detect the objects through 2D or 3D points grouping
processes. The detected objects are represented by
geometric primitives such as 2D bounding boxes
(Dellaert, 1997) or 3D cuboids (Nedevschi, 2007).
As an alternative approach, the objects may be
represented by polylines. One of the advantages of
the polyline based objects representation is the close
approximation of the object contour by the
polygonal model while having a number of vertices
as small as possible. In the same time the polyline
could inherit the type, position and height properties
of the associated object.
The polyline object representation may lead to
the creation of subsequent algorithms that are
computationally fast due to the fact that only a small
subset of points is employed.
The road feature identification through the object
delimiters detection can be used in the unstructured
environments as an alternative solution to the lane
detection algorithms.
The object delimiters extraction is studied in
some areas like mobile robots (Harati, 2007; Magin,
1994; Joshi, 2002; Laviers, 2004; Veeck, 2004), or
autonomous vehicle systems (Kolski, 2006;
Madhavan, 2002; Goncalves, 2007). The polyline
representation is very common in many algorithms,
such as localization and mapping (Joshi, 2002;
Laviers, 2004; Veeck, 2004; Madhavan, 2002),
contour tracking (Prakash, 2007) and path planning
(Madhavan, 2002).
The polyline extraction methods differ by the
nature of the information as well as by the sensors
used for data acquisition process. Current systems
use laser (Harati, 2007; Veeck, 2004; Kolski, 2006;
Madhavan, 2002), sonar (Goncalves, 2007; Laviers,
2004) or vision sensors (Goncalves, 2007).
Two main directions can be distinguished for the
delimiters extraction:
The contour processing of already detected
objects from the scene (Gonzales, 2002);
The radial scanning of the environment. This
method is common for the systems based on
sonar or laser sensors (Harati, 2007; Kolski,
2006).
A method for map representation as a set of line
segments or polylines is described in (Laviers,
2004). An occupancy grid is created here from sonar
information. The data is converted to a list of
vertices using the Douglas Peucker line reduction
algorithm.
86
Vatavu A., Nedevschi S. and Oniga F. (2009).
REAL TIME OBJECT DELIMITERS EXTRACTION FOR ENVIRONMENT REPRESENTATION IN DRIVING SCENARIOS.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 86-93
DOI: 10.5220/0002210400860093
Copyright
c
SciTePress
In (Veeck, 2004) a method that learns sets of
polylines from laser range information is presented.
The polylines are iteratively optimized using the
Bayesian Information Criterion.
The polyline representation was chosen in
(Madhavan, 2002) for terrain-aided localization of
autonomous vehicle. The new range data obtained
from the sensor are integrated into the polyline map
by attaching line segments to the end of the polyline
as the vehicle moves gradually along the tunnel.
In this paper we present and evaluate several
methods for real-time environment representation by
extracting object delimiters from the traffic scenes
using a Dense Stereovision System (Nedevschi,
2007). The delimiters detection is based on
processing the information provided by a 3D
classified occupancy grid obtained from the raw
dense stereo information. One of the problems in
representing the environment through the occupancy
grid is a large volume of data. Therefore we propose
a more compact 2.5D model by representing the
environment as a set of polylines with associated
height features. We present two approaches to
extract object delimiters:
The 3A Tracing. The classical algorithm for
contour tracing is improved by developing a
new method named 3A Tracing Algorithm;
The radial scanning of the occupancy grid.
We have developed a Border Scanning method
that is able to detect delimiters of complex
objects taking into account the nature of
information from the traffic scene (curb, object,
and road).
A polyline map is generated as the result of the
delimiters extraction process. Each polyline element
inherits the type (object, curb), position and height
properties of the associated objects from the
occupancy grid.
In the next section, we describe the proposed
Delimiters Extraction architecture. The delimiters
detection approaches are presented in section 3.
Experimental results are given in section 4, and
section 5 concludes the paper with final remarks.
2 PROPOSED ARCHITECTURE
Our delimiters detection approaches have been
conceived for an urban driving assistance system.
We extended our Dense Stereo-Based Object
Recognition System (DESBOR) by developing an
Object Delimiters Detection component. A detailed
description about the DESBOR system is presented
in (Nedevschi, 2007).
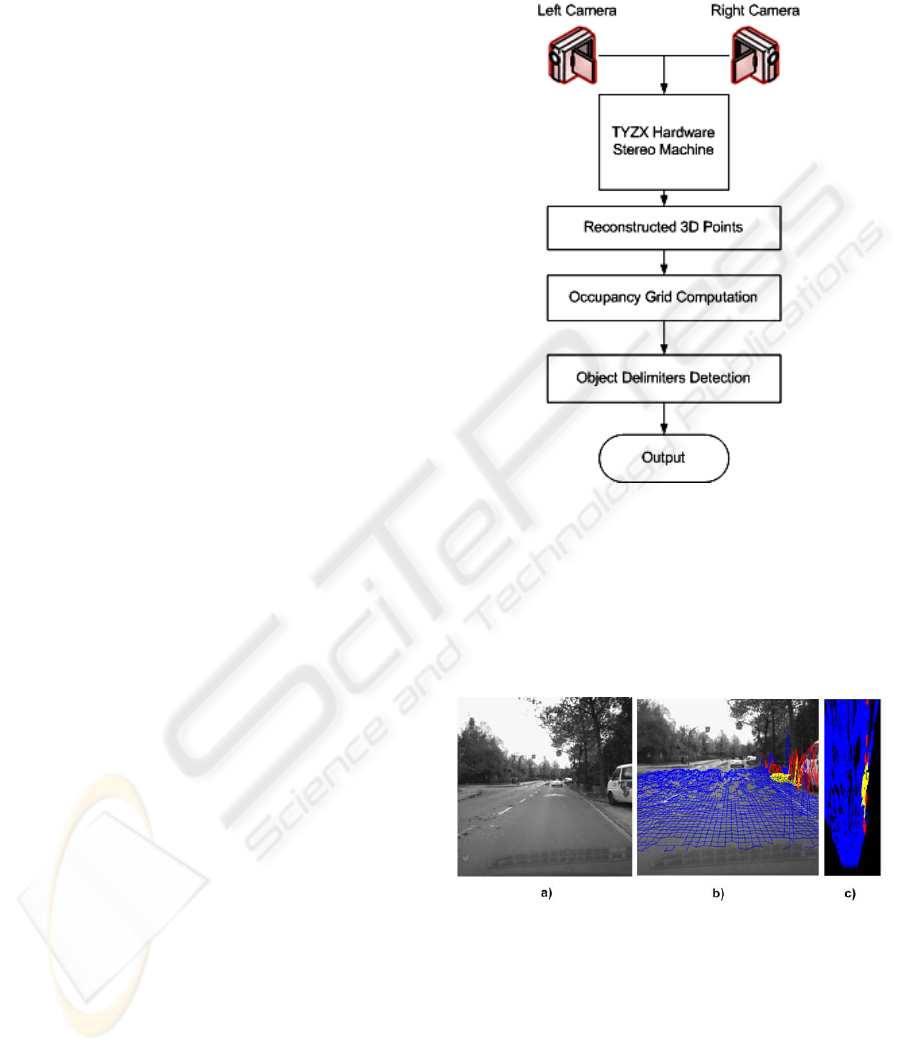
The Object Delimiters Detection system
architecture consists in the following modules (see
Figure 1):
Figure 1: System Architecture.
TYZX Hardware Stereo Machine. The 3D
reconstruction is performed by the “TYZX”
hardware board (Woodill, 2004).
Reconstructed 3D Points. The reconstructed 3D
points are used for the occupancy grid generation.
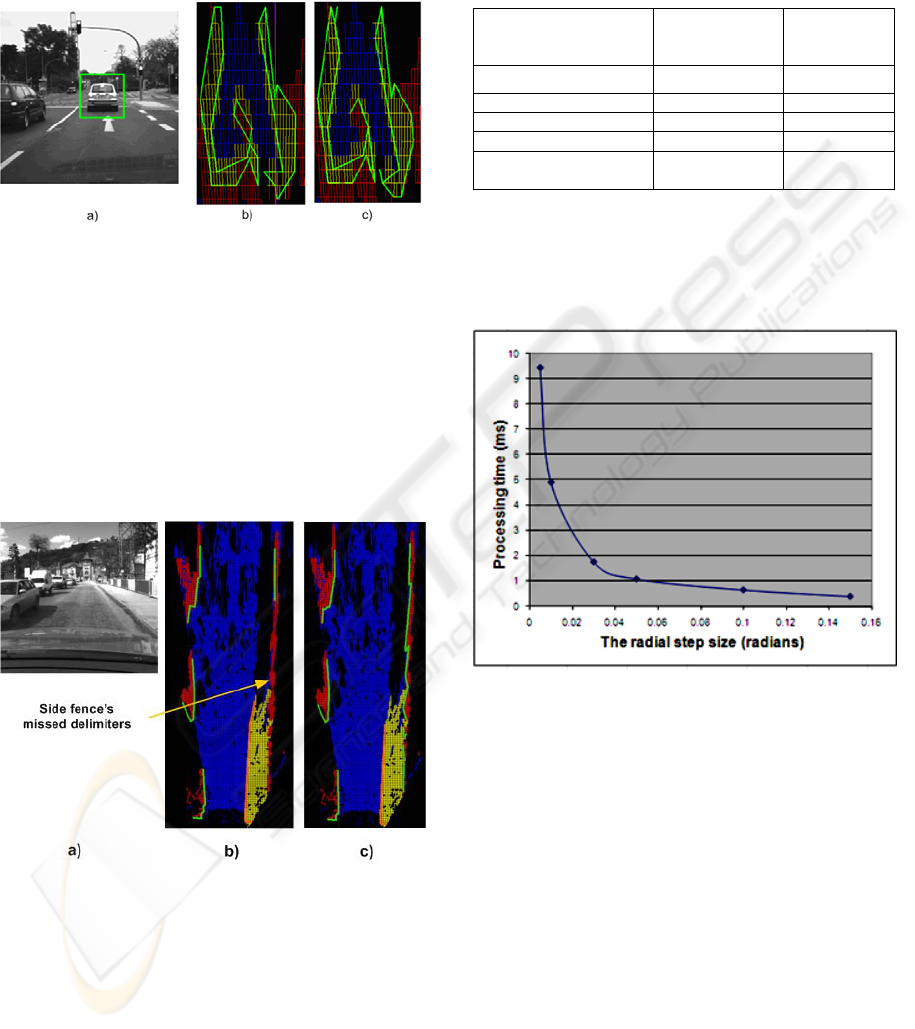
Figure 2: The Occupancy Grid (c) is computed from the
Elevation Map (b) of a scene (a). The occupancy grid cells
are roughly classified (blue – road, yellow – traffic isle,
red – obstacles).
Occupancy Grid Computation. The occupancy
grid (see Figure 2.c) represents a description of the
scene, computed from the raw dense stereo
information represented as a digital elevation map
(see Figure 2.b). The occupancy grid cells are
classified into road, traffic isle and object cells. A
REAL TIME OBJECT DELIMITERS EXTRACTION FOR ENVIRONMENT REPRESENTATION IN DRIVING
SCENARIOS
87
detailed description about the occupancy grid
computation is presented in (Oniga, 2007).
Object Delimiters Detection. The Object
Delimiters detection uses the occupancy grid results
as the input and generates a set of unstructured
polygons approximated with the objects contour.
The delimiters can be extracted from the occupancy
grid through both 3A Tracing and Border Scanning
algorithms.
Object Delimiters Detection Output. A polyline
map is generated as the result of delimiters
extraction process. For each polyline element we
keep the following information: a list of vertices, the
delimiter type (object, curb), and the height of the
object for which we apply the polyline extraction.
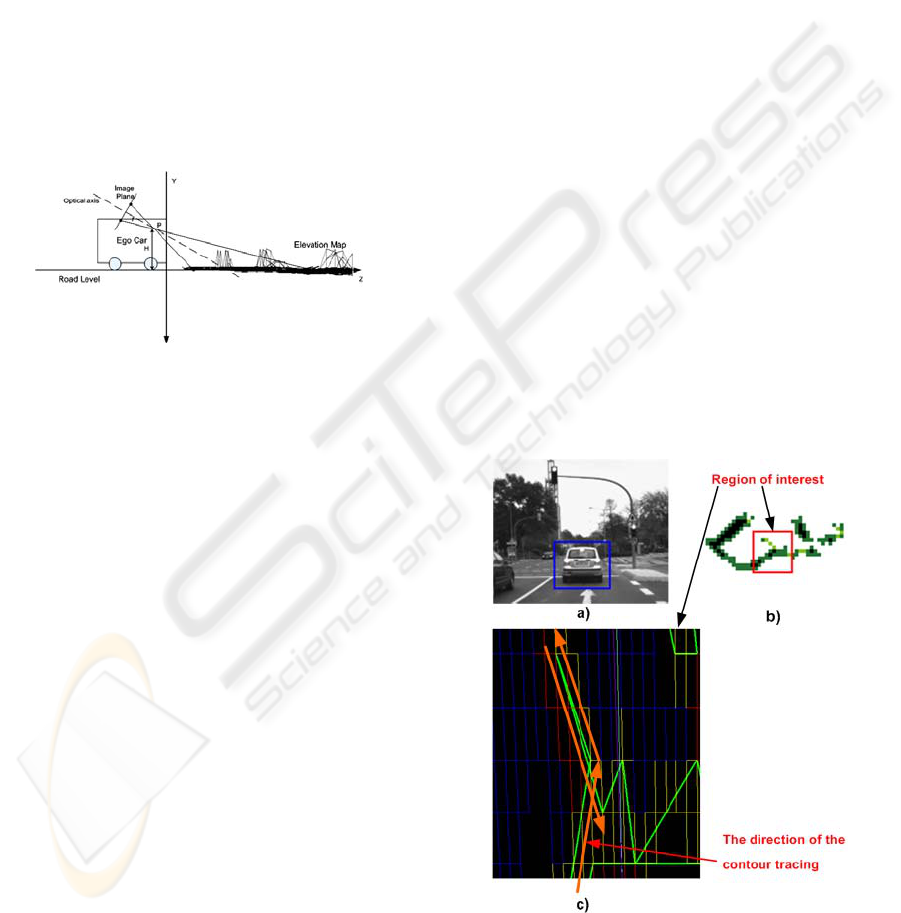
Figure 3: The car coordinate system.
It must be noted that the car coordinate system
coincide with the world coordinate system having its
origin on the ground in front of the car (see Figure
3). The position and orientation of the stereo
cameras are determined by the absolute extrinsic
parameters (Marita, 2006).
3 OBJECT DELIMITERS
EXTRACTION APPROACHES
A set of steps have been identified for the delimiters
extraction:
Step 1: Object Labeling. In this step each object
from the occupancy grid is labeled with a unique
identifier.
Step 2: The Contour Extraction. We compute the
contours of the non-drivable blobs (objects, traffic
isles) from the occupancy grid. Each contour point
will represent a single cell in the grid map.
Step 3: The Polygonal Approximation. Given a
curve C we will find a polygon that closely
approximates C while having as small a number of
vertices as possible.
Next, we will present several algorithms
developed by us for delimiters extraction. All these
methods have in common the 1
st
and 3
rd
step. The 2
nd
step is different in each case. We have used two
main approaches for the contour extraction:
1) The Contour Tracing for a Given Object. Once
an object cell has been identified, contour tracing is
performed starting from this point, adding each
traversed cell to the current contour. In this paper we
present an improved version of contour tracing, the
3A Tracing Algorithm.
2) The Border Scanning. A radial scanning is
performed with a given radial step, traversing the
interest zone and accumulating the contour points at
the same time. The main difference of this approach
is that we scan only the visible parts from the ego-
car position. Two main improvements of the Border
Scanning method are discussed: the Border
Scanning using a variable step, and the Combined
Border Scanning, taking into account the occupancy
grid blob’s nature (traffic isles, obstacles).
3.1 The 3A Tracing Algorithm
The classical contour tracing algorithm collects the
contour points of an object by traversing the object
boundary.
Figure 4: Contour tracing of the care points (b) from the
scene (a). There are cases when two polygonal segments
can intersect each other (c), after the polygonal
approximation of the car contour.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
88
A disadvantage of the classical algorithm is that
there are cases when the same delimiter point can be
passed many times. This may lead to the incorrect
representation, after the contour approximation step
(see Figure 4).
To avoid this problem we have developed an
extended contour tracing algorithm named 3A
Tracing. In this method we use two stacks, Stack A
and Stack B. The name 3A Tracing comes from the
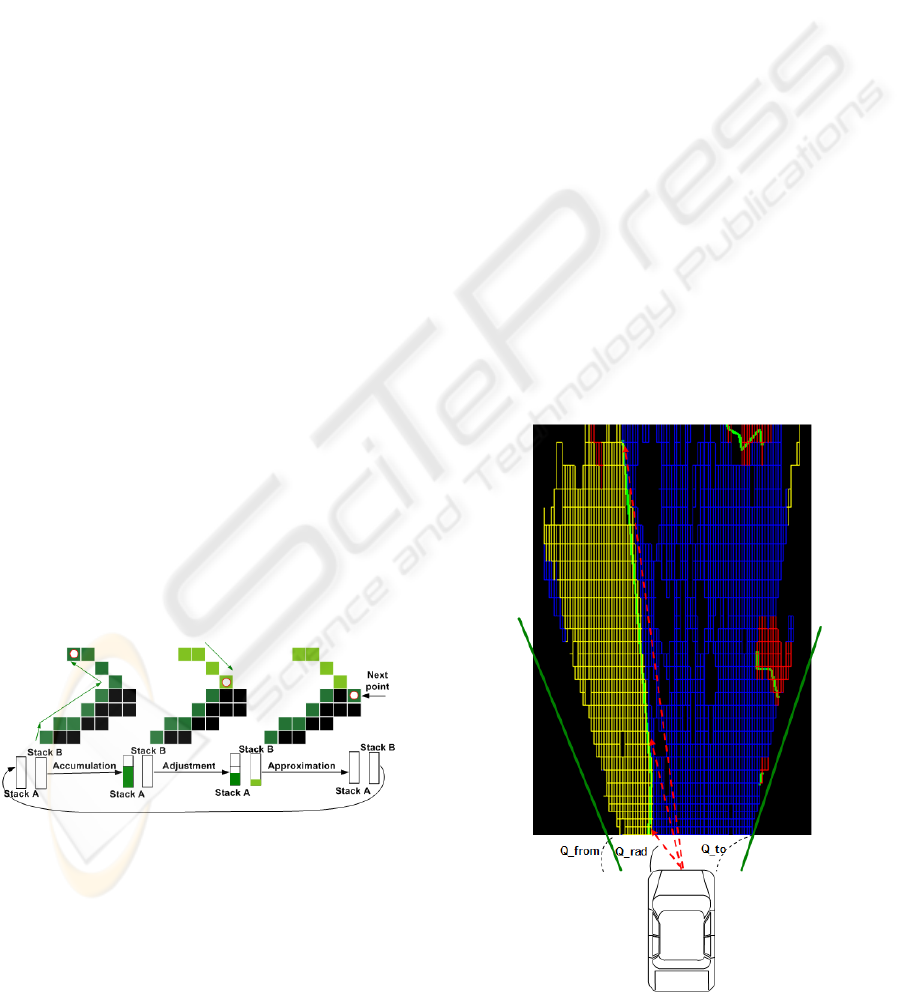
next three main phases (see Figure 5):
Phase 1: Accumulation. The tracing is made
analogue to the Contour Tracing algorithm. All
accumulated points are pushed onto the stack A. The
traversed points are marked with a flag in order to
know whether they were traversed or not at least one
time. Once we found a terminal point (from which
the tracing is made in the inverse sense) we pass to
the 2nd phase of the algorithm.
Phase 2: Adjustment. In this phase the tracing
continues in the inverse sense by extracting already
passed points (drawn with light green) from the
Stack A, and pushing them onto the Stack B. The
Adjustment is repeated until we reach a contour
point that has not passed yet. Once the new contour
point is found we pass to the 3rd phase of the
algorithm.
Phase 3: Approximation. Polygonal approximation
is applied to each of the two stacks. After the
polygonal approximation process the two stacks will
be cleared and the algorithm is repeated from the
Phase 1.
The algorithm stops when the start point is
reached once again.
Figure 5: 3A Tracing Algorithm. In the Accumulation
phase, all traversed points are pushed onto the Stack A. In
the Adjustment stage, the already passed points are
extracted form the Stack A and pushed onto the Stack B.
Polygonal approximation is applied in the last step of
algorithm.
Although the 3A Tracing algorithm eliminates
some particular cases in which two polygonal
segments may intersect, like in the Contour Tracing,
it works only on the connected components.
Therefore this method does not take into account the
cases of more complex objects, when a single
obstacle is represented as many disjoint
patches.Therefore we have elaborated an extraction
method through the radial scanning of the Elevation
Map.
3.2 The Border Scanner Algorithm
The Border Scanner algorithm performs a radial
scanning with a given radial step. The scanning axis
moves in the radial direction, having a fixed center
at the Ego Car position. The scanning process is
made into the limits of Q_from and Q_to angles,
thus only the interest area are scanned, where the
delimiters can be detected (see Figure 6). Having a
radial axis with a Qrad slope, Q_from < Qrad <
Q_to, we try to find the nearest point from the Ego
Car situated on this axis. In this way, all subsequent
points will be accumulated into a Contour List,
moving the scanning axis in the radial direction. At
each radial step we verify that a new object has been
reached. If a new label has been found then the
polygonal approximation on the Contour List points
is performed. The list will be cleared, and the
algorithm will be continued finding a new polygon.
Figure 6: Border Scanning on the Occupancy Grid Points.
REAL TIME OBJECT DELIMITERS EXTRACTION FOR ENVIRONMENT REPRESENTATION IN DRIVING
SCENARIOS
89
Advantages. The obtained results are more close to
the real obstacle delimiters from the scene. The
problem of the complex objects presented in the case
of Contour Tracing algorithms is eliminated.
Therefore many disjoint patches that belong to the
same object can be enveloped by a single delimiter.
Disadvantages. A little obstacle (noise present in
the occupancy grid) can occlude a great part from
the scene, if this obstacle is too near to the Ego-Car.
The scanning is influenced by the presence of such
false obstacles.
3.2.1 The Border Scanning Algorithm using
Variable Step
Having a constant radial step, the detected pixel
density will decrease with the depth distance. The
distance between two consecutive detected pixels is
greater at the far depths. The idea is that some
important information about the delimiters can be
lost at the far distances.
A good solution is to use a scanning method with
a variable step, thus the radial step should be
adapted with the distance.
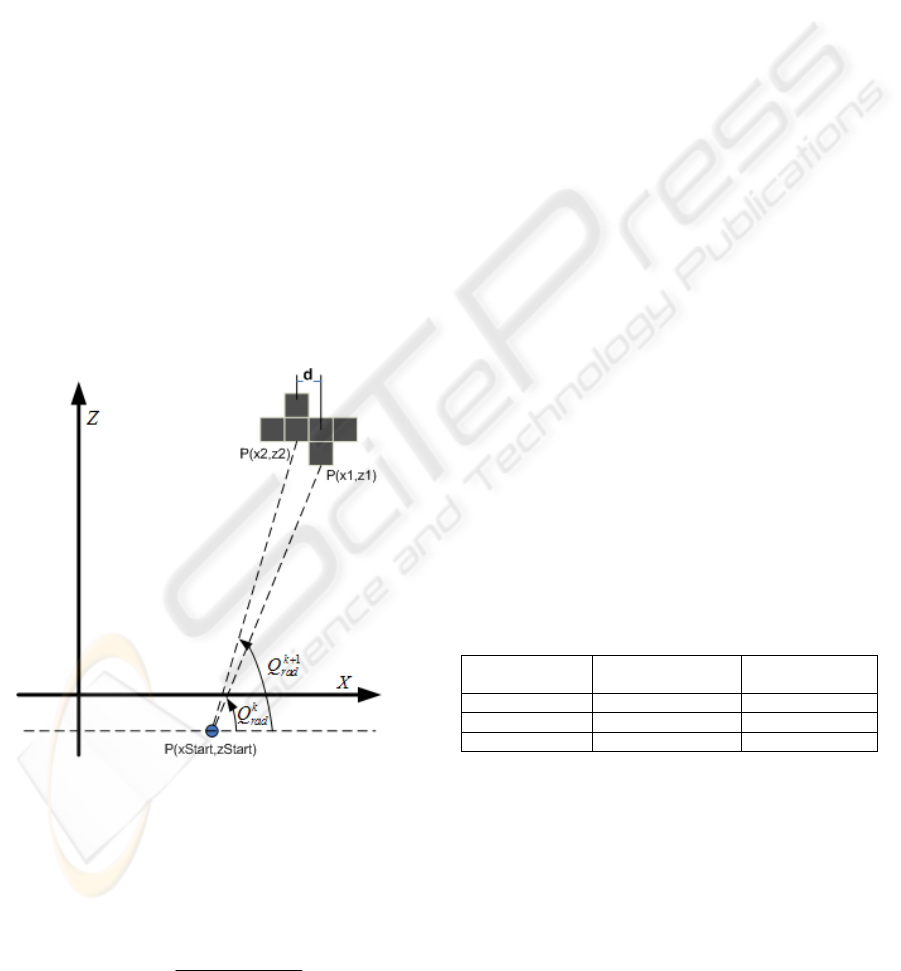
Figure 7: Radial angle estimation for the next step in the
Variable Step Border Scanning approach.
If we have a point P
1
(x
1
, z
1
) of a given object and
a radial axis containing the point P
1
with a radial
angle Q
k
rad
at the k step, then we estimate the radial
angle at the k+1 step (see Figure 7):
)arctan(
1
1
1
dxx
zz
Q
Start
Start
k
rad
−−
−
=
+
(1)
Where:
x
1
, z
1
are the coordinates of the P
1
point;;
x
Start
, z
Start
are the ego-car point coordinates.
d is considered the distance between any two
adjacent points.
However, there are situations when no object
point can be reached on the current scanning axis.
Therefore we cannot estimate the radial angle for the
next step, because we don’t know the distance of the
current object point from the Ego-Car. In this case,
like in the simple Border Scanning method, we use a
fixed step, until a new object point will be found.
3.2.2 The Combined Border Scanning
We know that the occupancy grid cells are classified
into obstacles (cars, pedestrians etc.) or traffic isles
(road-parallel patches). If we take into account only
the first nearest point from the car, many relevant
objects delimiters may be omitted. For example, the
first obstacle from the car can be a curb. In this case,
we are interested not only in the curb delimiters but
also in the delimiters above the curb or behind the
curb. Therefore we extended our Border Scanning
algorithm by developing a method that takes into
consideration the obstacle’s nature making a
decision based on two types of information “What
have we found?” and “What we have to find?”. The
algorithm consists in two passes: one for the object
delimiters detection, and second for the traffic isles
delimiters detection.
In the Table 1 is presented the returned result
when we want to find a delimiter taking in account
the point type we have found.
Table 1: The Combined Border Scanning method. The
result is returned, taking into consideration the found point
type.
Delimiter’s type
we want to find
Point Type we
have found
Returned result
OBJECT OBJECT FOUND
CURB OBJECT NOT FOUND
CURB CURB FOUND
4 EXPERIMENTAL RESULTS
For the experimental results we have tested a set of
15 scenarios from the urban traffic environment
using a 2.66GHz Intel Core 2 Duo Computer with
2GB of RAM.
Figure 8 shows a comparative result between the
Contour Tracing and 3A Tracing algorithms, using
an approximation error of two points. One can notice
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
90
that the polygonal segment intersection in the case
of classical contour tracing algorithm (see Figure
8.b) was eliminated by applying the 3A Tracing
algorithm (see Figure 8.c).
Figure 8: Delimiters detection through the Contour
Tracing algorithm (b) and 3A Tracing algorithm (c). The
detection is performed on the occupancy grid computed
from the scene (a).
The difference between the result of delimiters
detection in the case of Simple border Scanner and
Combined Border Scanner algorithms is presented in
the
Figure 9. It can be observed that in the case of
Combined Border Scanner (see Figure 9.b) the side
fence’s delimiter is detected in spite of his position
behind the curb (Figure 9.c).
Figure 9: Border scanning of a scene (a). The side fence’s
delimiters are missed in the case of the Simple Border
Scanning (b) and have been detected in the case of the
Combined Border Scanning algorithm (c).
In the Table 2 the results from the Variable Step
Border Scanner and Fixed Step Border Scanner are
computed for the same driving scene. It can be
observed that the number of detected points is
greater in the case of Variable Step Border Scanner
algorithm, thereby 11466 points, which means 28
detected points per frame in comparison with 22
detected points per frame in the case of Fixed Step
Border Scanner algorithm.
Table 2: Fixed Step Border Scanner vs. Variable Step
Border Scanner.
Fixed Step
Border Scanner
Variable Step
Border
Scanner
Number of Frames 406 406
Detected points 9058 11466
The radial step (radians) 0.01 variable
Points per Frames 22 28
Average processing
time per frame
4 ms 5 ms
The average extraction time using the 3A
Tracing algorithm is about 0.7ms per frame and
depends on the angular resolution in the case of
Border Scanner approach.
Figure 10: The processing time vs. the radial step size.
Figure 10 shows how the radial step size
variation affects the system response time using the
Combined Border Scanning approach.
Figure 11 is a diagram that shows the impact of
radial step size on delimiters detection rate using the
border scanner method. We can observe that, with a
higher radial step size we obtain an increase in
processing time while the detection rate decreases.
The solution is a tradeoff between the system
processing time and detection rate.
Figure 12 presents results for various traffic
scenes using the Combined Border Scanning
method. For the border scanning algorithm with a
radial step of 0.01 radians the average processing
time is about 5ms and the delimiters detection rate is
98.66%.
REAL TIME OBJECT DELIMITERS EXTRACTION FOR ENVIRONMENT REPRESENTATION IN DRIVING
SCENARIOS
91
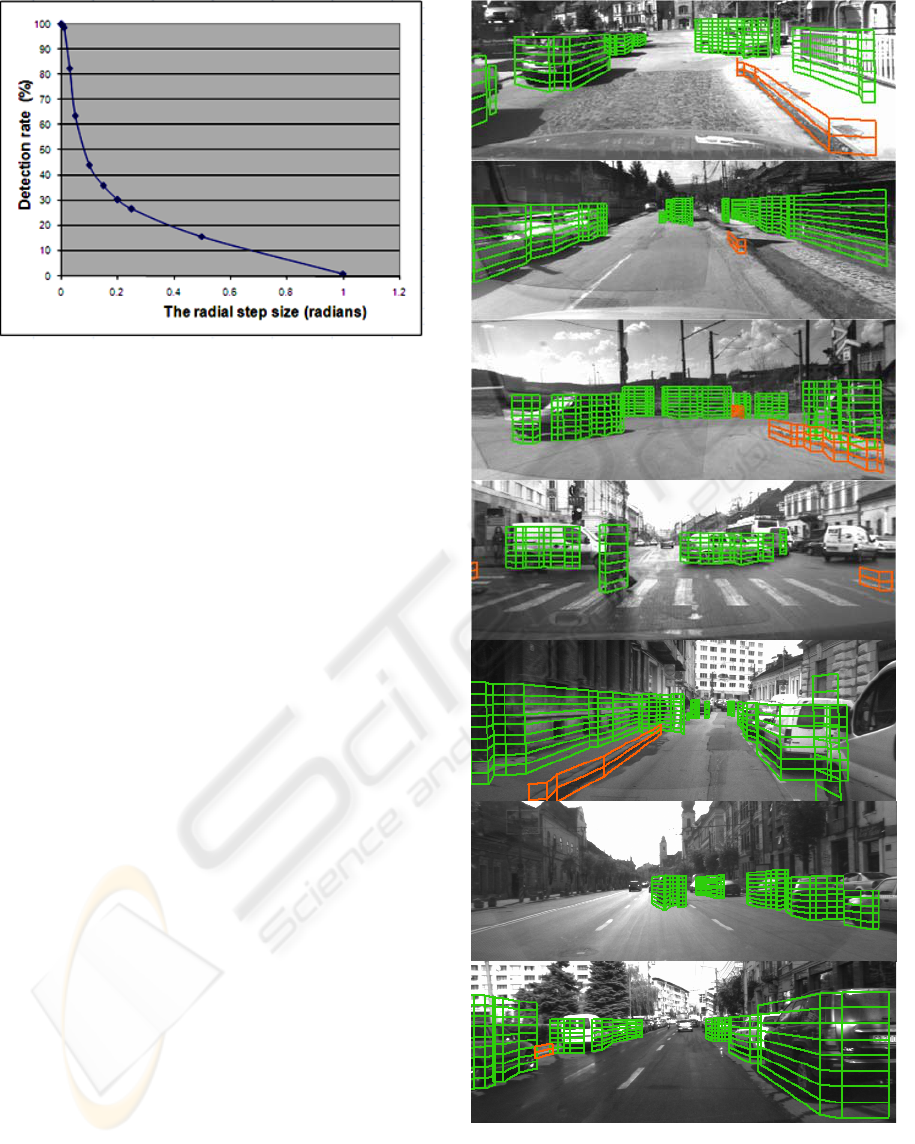
Figure 11: The detection rate vs. the radial step size.
5 CONCLUSIONS
In this paper we present and evaluate several
methods for real-time environment representation
through the object delimiter extraction and
characterization from dense stereovision images.
The delimiters detection is based on processing the
information provided by a 3D classified occupancy
grid obtained from the raw dense stereo information.
The result is a more compact 2.5D model for
representing the environment, as a set of polylines.
Each polyline element inherits the type (object,
curb), position and height properties of the
associated object from the occupancy grid.
We have developed an improved Contour
Tracing method named 3A Tracing algorithm that
eliminates the situation when two polygonal
segments can intersect each other.
Another approach presented in this paper is the
polyline extraction through the radial scanning of the
occupancy grid. Although the tracing approach is
more computationally-efficient, the results provided
by the Border Scanner algorithm are more
appropriate for detecting the real obstacle delimiters
from the scene. The algorithm is able to extract only
the visible area from the ego-vehicle since the
occluded points do not offer relevant information.
Using the Border Scanner algorithm, our system is
fast and achieves a high rate of detection: 98.66%.
Figure 12: Object delimiters detection through the
Combined Border Scanning algorithm for various traffic
scenes. The delimiters are projected onto the Left Image
and are represented as grids labeled as Traffic Isles
(orange) or Objects (light green). The grid height is the
same as the enveloped object by the current delimiter.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
92

REFERENCES
Dellaert, F., Thorpe, C., 1997. Robust Car Tracking using
Kalman filtering and Bayesian templates. In
proceedings of Conference on Intelligent
Transportation Systems, vol. 3207, 1997. p. 72-83.
Goncalves, A., Godinho, A., Sequeira, J., 2007. Lowcost
sensing for autonomous car driving in highways. In
proceedings of ICINCO2007 - 4th International
Conference on Informatics in Control, Automation and
Robotics, Angers, France, 2007.
Gonzales, R. C., Woods, R. E., 2002, Digital Image
Processing, Addison Wesley, second edition.
Harati, A., Siegwart, R., 2007. A new approach to
segmentation of 2d range scans into linear regions. In
Proceedings of the 2007 IEEE/RSJ International
Conference on Intelligent Robots and Systems, San
Diego, CA, USA, October 29 - November 2, 2007.
Joshi, R. R., 2002. Novel metrics for map-matching in in-
vehicle navigation system. In IEEE Intelligent Vehicle
Symposium, Vol. 1, 2002, pp. 36-43.
Kolesnikov, A., Franti, P., 2005, Data reduction of large
vector graphics. Pattern Recognition, March, 2005, 38
(3), 381-394.
Kolski, S., Ferguson, D., Bellino, M., Siegwart, R., 2006.
Autonomous driving in structured and unstructured
environments. In proceedings of IEEE Intelligent
Vehicles Symposium, 2006.
Laviers, K. R., Peterson, G. L., 2004. Cognitive robot
mapping with polylines and an absolute space
representation. In proceedings of the IEEE
International Conference on Robotics and
Automation, Hilton New Orleans Riverside, New
Orleans, LA, USA, April 26-May 1 2004, pp. 3771-
3776.
Madhavan, R., 2002. Terrain aided localization of
autonomous vehicles. In Symposium on Automation
and Robotics in Construction, Gaithersburg,
September 01, 2002.
Magin, G., Russ, A., 1994. Supporting real-time update of
an environment representation for autonomous mobile
robots real-time systems. In EuroMicro Workshop on
Real-Time Systems, Jun 15-17 1994, pp. 34-39.
Marita, T., Oniga, F., Nedevschi, S., Graf, T., Schmidt, R.,
2006. Camera calibration method for far range
stereovision sensors used in vehicles. In Proceedings
of IEEE Intelligent Vehicles Symposium, (IV2006),
Tokyo, Japan, June 13-15 2006, pp. 356-363.
Nedevschi, S., Danescu, R., Marita, T., Oniga, F., Pocol,
C., Sobol, S., Tomiuc, C. Vancea, C., Meinecke, M.
M., Graf, T., To, T. B., Obojski, M. A., 2007. A sensor
for urban driving assistance systems based on dense
stereovision. In Proceedings of Intelligent Vehicles
2007, Istanbul, June 13-15 2007, pp. 278-286.
Oniga, F., Nedevschi, S., Meinecke, M. M., To, T. B.,
2007. Road surface and obstacle detection based on
elevation maps from dense stereo. In Proceedings of
the IEEE Intelligent Transportation Systems
Conference, Seattle, WA, 2007, pp. 859-865.
Pijpers, M., 2007. Sensors in adas, Universiteit Twente.
Prakash, S., Thomas, S., 2007. Contour tracking with
condensation/stochastic search. In Dept. of CSE, IIT
Kanpur, September 26 2007.
Veeck M., Burgard, W., 2004. Learning polyline maps
from range scan data acquired with mobile robots. In
proceedings of the IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), 2004.
Woodill, J. I., Gordon, G., Buck, R., 2004. Tyzx deepsea
high speed stereo vision system. In Proceedings of the
IEEE Computer Society Workshop on Real Time 3-D
Sensors and Their Use, Conference on Computer
Vision and Pattern Recognition, 2004.
REAL TIME OBJECT DELIMITERS EXTRACTION FOR ENVIRONMENT REPRESENTATION IN DRIVING
SCENARIOS
93
