
A HYBRID METAHEURISTIC FOR SOLVING
SINGLE MACHINE SCHEDULING PROBLEM
Adrian Serbencu, Viorel Mînzu, Daniela Cernega and Adriana Serbencu
Control Systems and Industrial Informatics Department “Dunarea de Jos”Galati University
Domneasca – 47, Galati, Romania
Keywords: Discrete optimization, Manufacturing, Metaheuristics, Stochastic descent, Ant Colony Systems.
Abstract: This paper proposes a metaheuristic for solving the Single Machine Scheduling Problem that is
implemented by a hybrid system made up of an Ant Colony System and a stochastic descent algorithm
called Kangaroo. The hybrid system is based on the collaboration between a social type multiagent system
and an Iterated Solution Improvement method.
1 INTRODUCTION
The main purpose of multiagent systems is the
distributed solving of problems. A special type of
problem, which can be solved in a distributed way,
is the combinatorial optimization problem. The idea
of the algorithm “ant system” (Dorigo, et al., 1996)
has the source in the study of insects collective
behavior. The ants have the capability to act together
in order to perform a task, but any of them could not
perform alone the task (Beckers, et al., 1992). This
is a distributed solving mechanism because every
agent has only a very small contribution. The
complex collective behavior and the interactions
between agents are fundamental in the field of
artificial life.
This paper proposes a metaheuristic for solving
the Single Machine Scheduling Problem (SMSP).
For a given processor and a set of jobs that must be
executed on this processor, the problem is to
determine the sequence of jobs such that the
weighted tardiness (defined in section 2) is
minimized. Obviously, because of the combinatorial
aspect, this kind of problem is NP-complete. Hence,
sub-optimal solutions are generally preferred to
optimal ones. A sub-optimal solution is given by an
approximation algorithm like genetic algorithm,
simulated annealing, tabu search, stochastic descent
algorithms, etc. In paper (Madureira, et al., 2000),
an interesting practical resolution is given, in the
context of a scheduling system for Dynamic Single
Machine Problem. The SMSP is solved using a
genetic algorithm and thus, good results are
obtained.
In exchange, algorithms like simulated annealing
(Kirkpatrick, et al., 1983), tabu search (Gloverf,
1989), stochastic descent (Papadimitriou and
Steiglitz, 1982), etc. are Iterated Solution
Improvement methods, which means that only one
solution is improved by an iterative procedure. This
kind of methods has abilities to intensify the local
search and to detect the local minima. In the last
years, hybrid metaheuristics (Vaessens, et al, 1992;
Taillard et al., 1998; Mahfoud, and Goldberg, 1995)
have been developed, giving very interesting results.
That is why, this paper proposes an Ant Colony
System (ACS) based metaheuristic, described in
section 3, formed by an ACS and a parallel version
of a stochastic descent algorithm, called Kangaroo.
The system has the collaborative power of the ACS
and the intensification ability of the Kangaroo
algorithm (KA).
The paper is organized as follows. In section 2,
the Single Machine Scheduling Problem is stated.
The general structure of the proposed hybrid system
is presented in section 3 and the particularities of an
ACS solving the SMSP are described in section 4.
Section 5 outlines the implementation of the
Kangaroo Algorithm, whereas the computational
results are presented in section 6.
68
Serbencu A., Mînzu V., Cernega D. and Serbencu A. (2009).
A HYBRID METAHEURISTIC FOR SOLVING SINGLE MACHINE SCHEDULING PROBLEM.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 68-74
DOI: 10.5220/0002210700680074
Copyright
c
SciTePress
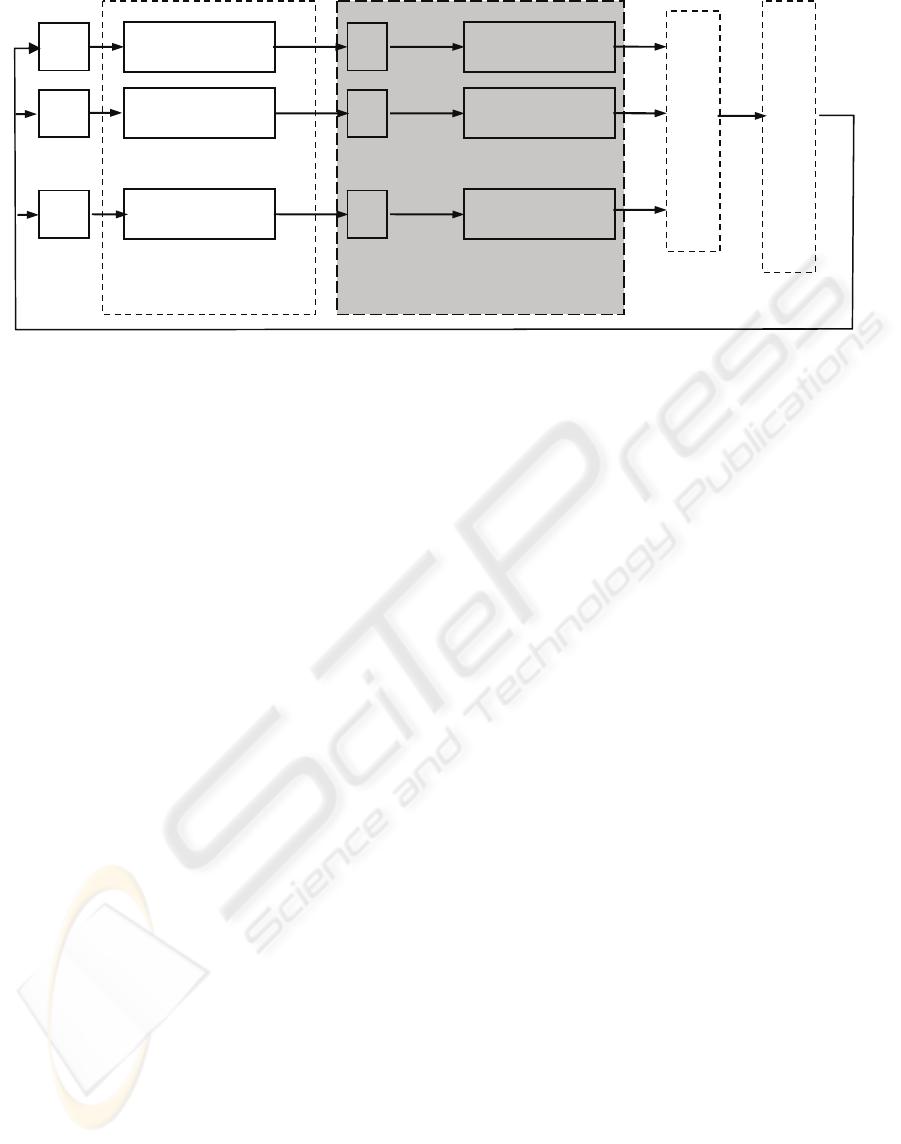
Figure 1: Ant Colony System with Kangaroo algorithm.
2 SINGLE MACHINE
SCHEDULING PROBLEM
In order to minimize the total Weighted Tardiness
for the SMSP the following assumptions are
considered: a set of n independent jobs (j= 1,…,n) is
available for processing at time zero and the
attributes of the jobs are known in advance. The
machine is never kept idle if there are any jobs to
complete and it can handle only one job at a time. It
processes the jobs without pre-emption. The jobs’
set-up times are independent of the jobs' sequence,
being included in the job processing times.
For each job j, it is considered p
j
the processing
time, d
j
the due date, that means the date when the
job should be completed, and w
j
the penalty liable
for each unit of delay. The jobs’ completion starts at
time t=0. The tardiness of a job is given by
{
}
,0
jjjj
TMaxtpd=+−,
where t
j
is the start time of job j. The objective
function, which will be referred as fitness function,
is:
1
()
n
j
j
j
f
uwT
=
=
∑
where u is a solution of the problem, that is a
permutation of the job set:
12 ii1 n
u [ j , j , ..., j , j , ..., j ]
+
=
,
{
}
i
j 1,2,...,n∈
The optimality criterion of the SMSP is
min ( )
u
f
u
.
This problem is a combinatorial optimization
NP-complete problem. The problem can't be solved
with deterministic optimal algorithms, as they
require a computational time that increases
exponentially with the problem size (Garey, and
Johnson, 1979).
3 AN ANT COLONY SYSTEM
BASED METAHEURISTIC
In papers (Bauer, et al., 1999; Matthijs, et al., 2000)
the Ant Colony System is used to solve SMSP. In
this approach, the artificial ants are constructing
solutions for this problem and afterwards these
solutions are considered initial solutions for a local
optimization procedure.
The main idea of the proposed metaheuristic is to
use a stochastic descent method instead of the local
optimization procedure. In fact, this method is an
Iterated Solution Improvement metaheuristic called
Kangaroo. As a result, we have a special hybrid
metaheuristic based on the collaboration between a
social multiagent system - Ant Colony System - and
a parallel version of Kangaroo algorithm.
The ACS is made up of N artificial ants which
are constructing solutions of the optimization
problem. The ants communicate using structured
variables whose values represent a provisional
quotation of the solutions or of parts of solutions
quality. The value of these structured variables
simulates the "pheromone" allowing the
communication between ants in natural systems. In
this case, the structured variables are grouped in a
"pheromone" matrix.
The general optimization system is an iterative
searching process for a better solution of the given
problem. An iteration has two succesive phases. In
Parallel version of
Solution construction &
Solution selection
Solution
1
Solution
2
Solution
N
KA
Solution
1
’
Solution
2
’
Solution
N
’
KA
KA
Ant
1
Ant
2
Ant
N
:
:
Global
p
heromone u
p
date
A HYBRID METAHEURISTIC FOR SOLVING SINGLE MACHINE SCHEDULING PROBLEM
69
the first phase, ACS is constructing N solutions and
the "pheromone" is continuously updated. The
resulting solutions are taken over in the second
phase, in order to be improved, by N instances of the
KA. From the beginning, the KA makes a local
optimization using the solutions produced by each
ant as initial solutions. The KA is not limited to this
single action, but it keeps trying to improve the
current solution following its own strategie. Every
instance of the KA is also an iterative procedure
looking for a better solution than the current one, in
a prescribed number of iterrations. The best found
solution is selected and it will be used in a new
global "pheromone" updating phase.
In the next iterration, the informations
accumulated in the "pheromone" matrix will be used
by the ACS, to guide the construction of the new set
of solutions. Here after, an outline of the proposed
metaheuristic is presented.
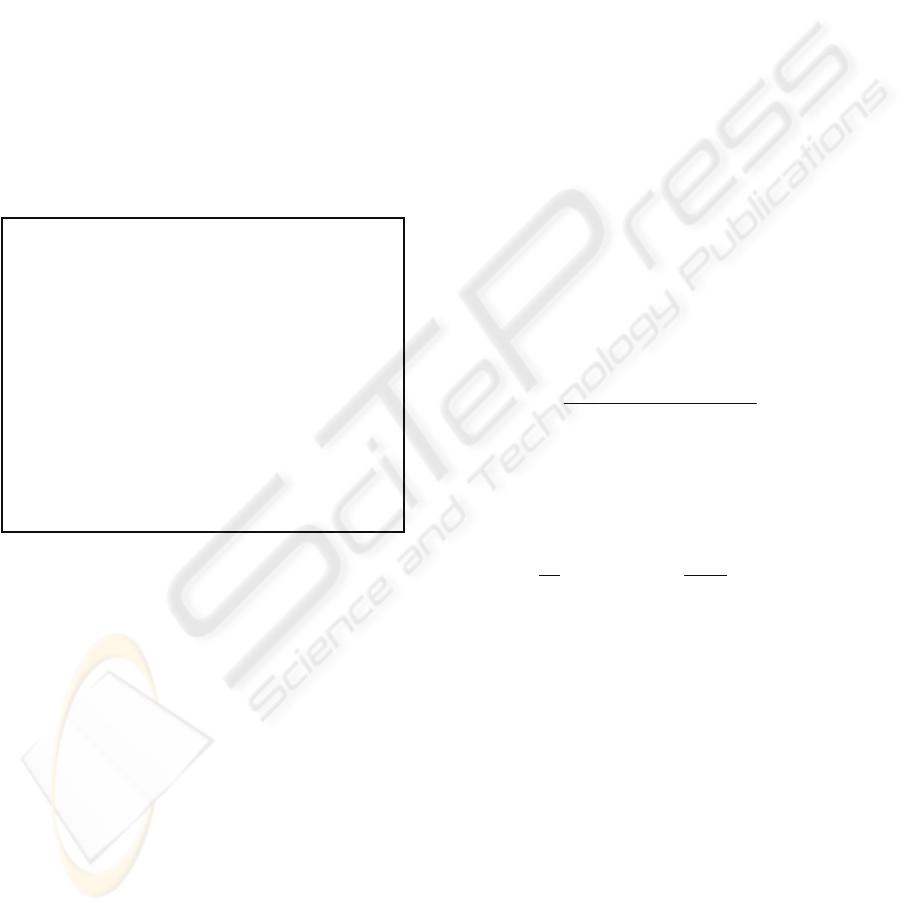
Figure 2: General structure of the proposed metaheuristic.
As mentioned before, at the first step, the
"pheromone" matrix is also updated during the
solutions construction (see section 4). The stop
criterion is usually a certain number of iterations.
4 ANT COLONY SYSTEM FOR
SOLVING SMSP
Generally speaking, for solving a combinatorial
optimization problem ACS needs two kinds of
information(Dorigo, et al., 1996; Dorigo, and
Gambardella, 1997a; Dorigo, and Gambardella,
1997b). One of them is the heuristic information and
the other one is specific to the ACS and concerns the
"pheromone".
Each ant of ACS produces a solution of the
problem, in the step 1 of the algorithm. This solution
is a complete sequence of jobs obtained by an
iterative process of placing a job j on the position i
(Matthijs, et al., 2000). At the position i, the ant
chooses the job j meeting two constraints:
a) the job j is not already placed in the sequence and
b) the "pheromone" τ(i, j) has the maximum value
for the job j.
For SMSP, the "pheromone" τ(i,j) is a quotation
of the interest to place a job j on the position i. The
heuristic information considered by an ant aiming to
select a job for the current position may be
represented by the inverse of the due date, or the
Modified Due Date (MDD)( Bauer, et al., 1999)
computed with the formula
j
max{d , (C )}
jj
mdd p=+,
where C is the total processing time of the jobs
already placed.
An ant k will select with probability q
0
the most
attractive job, in order to be placed in the current
position i, that is the task j assuring the maximum of
[][]
β
τ(, ) η(, )ij ij⋅ . Nevertheless, the same ant may
choose with the complementary probability (1-q
0
) a
job j using the probabilistic rule
[][]
[][]
k
β
k
β
k
uJ()
0otherwise
τ(, ) η(, )
if J ( )
τ(, ) η(, )
p(, )
p
ij ij
qi
ij ij
ij
∈
⋅
∈
⋅
=
⎧
⎪
⎪
⎨
⎪
⎪
⎩
∑
(1)
where:
- q
0
is a parameter of the algorithm
-
1
(, )
j
ij
d
η
=
or
1
(, )
j
ij
mdd
η
=
is the heuristic
information
- J
k
(i) is the set of not yet placed job by ant k;
- β is a parameter which determines the relative
importance of heuristic information
(0)
β
> .
When all the artificial ants have constructed the
solutions, the algorithm uses the following rule for
the global updating of the pheromone matrix:
(, ) (1 ) (, ) (, )ij ij ij
τ
ατ α τ
←
−⋅ +⋅Δ (2)
where
-
1
f ( , ) best sequence
(, )
0otherwise
Tiij
ij
τ
−
∈
Δ=
⎧
⎨
⎩
- 0<α<1 is the pheromone increase parameter
- T is the total weighted tardiness of the global-best
solution from the beginning of the trial.
The application of the rule (2) enforces only the
Do
1. The Ant Colony System constructs N
solutions for the given problem;
2. The parallel version of Kangaroo
Algorithm uses the N solutions
from the first step as initial
solutions and begins N stochastic
descent processes. The result is
a set of N other better solutions;
3. Select the best solution from this
set and use it to update the
"pheromone" matrix;
until the stop criterion.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
70
pheromone belonging to the best solution
encountered until the current iteration. This is the
reason of a premature convergence of the algorithm.
Therefore, the rule of local pheromone updating is
used. Every time the pheromone information is used
by an ant selecting the job j for the position i, the
rule (3) modeling the natural process of pheromone
evaporation (forgetting) is applied:
(, ) (1 ) (, ) (, )ij ij ij
τ
ρτ ρ τ
←− ⋅ +⋅Δ (3)
where 0<ρ<1 is a parameter.
The term Δ
τ
(i, j) in our implementation is set to
τ
0
, the initial pheromone level. In order to calculate
τ
0
, our algorithm constructs an initial solution for
SMSP. In this solution, the jobs are placed in
increasing order of the due date. The value of τ
0
is
initialized with the inverse of the total weighted
tardiness of this solution.
5 KANGAROO ALGORITHM
The KA is an approximation technique based on
stochastic descent (Fleury, 1995), inspired by the
simulation annealing method, but having a quite
different searching strategy.
The "Kangaroo" method is implemented by an
iterative procedure which minimizes an objective
function f(u). A current solution u of the considered
problem is replaced by a better one, situated in its
neighborhood N(u), using a random selection. The
algorithm tries "A" times to improve the current
solution, where A is a parameter of the algorithm. If
a new improvement is no longer possible, a "jump"
procedure is performed, in order to escape from the
attraction of a local minimum. This time the
improvement of the current solution is not
compulsory. This procedure can use a different
neighborhood definition N'(u).
A detailed description of the KA is given in
Minzu, and Henrioud, 1998. The stop criterion is
either a maximum iteration number or a bottom
bound of the objective function.
The best solution u
*
encountered in the iterative
process is memorized. At the end of KA, u* is the
"optimal" solution proposed by the algorithm.
The neighborhood N(u) is the set of solution u'
obtained from u by the permutation of the jobs
placed on positions i and i+1. For example, if u=[1 4
3 2 5], it holds N(u)={[4 1 3 2 5], [1 3 4 2 5], [1 4 2
3 5], [1 4 3 5 2], [5 4 3 2 1]}.
When a new improvement of the current solution
is no longer possible u is replaced by a solution u'
given by the "jump" procedure. In the case of SMSP
a possible definition of the neighborhood N'(u) is the
whole search space, but the KA converges (with
probability 1) slowly to the global optimum. A very
important aspect is the fact that deterministic
heuristics may be integrated in "jump" procedure, in
order to guide the search of an optimum solution
keeping the convergence of the KA if the
accessibility constraint is met (Minzu, and Henrioud,
1998). That is why, in the case of SMSP the
neighborhood N'(u) may be the set of solution u'
obtained from u by permutation of the job placed on
i
max
position, where i
max
is the position in u of the job
j
max
where
jj
nj
Twj
,...,1
max
maxarg
=
=
, with a job placed
on position i<i
max
. So the "jump" procedure
determines the job with the biggest weighted
tardiness and replaces it with a job situated on its
left. In this way there is a chance to diminish the
value of the criterion f(u).
6 IMPLEMENTATION AND
COMPUTATIONAL RESULTS
In order to reduce the run time of the hybrid system,
the job selection rule is applied on a reduced
candidate list that does not contain all the unplaced
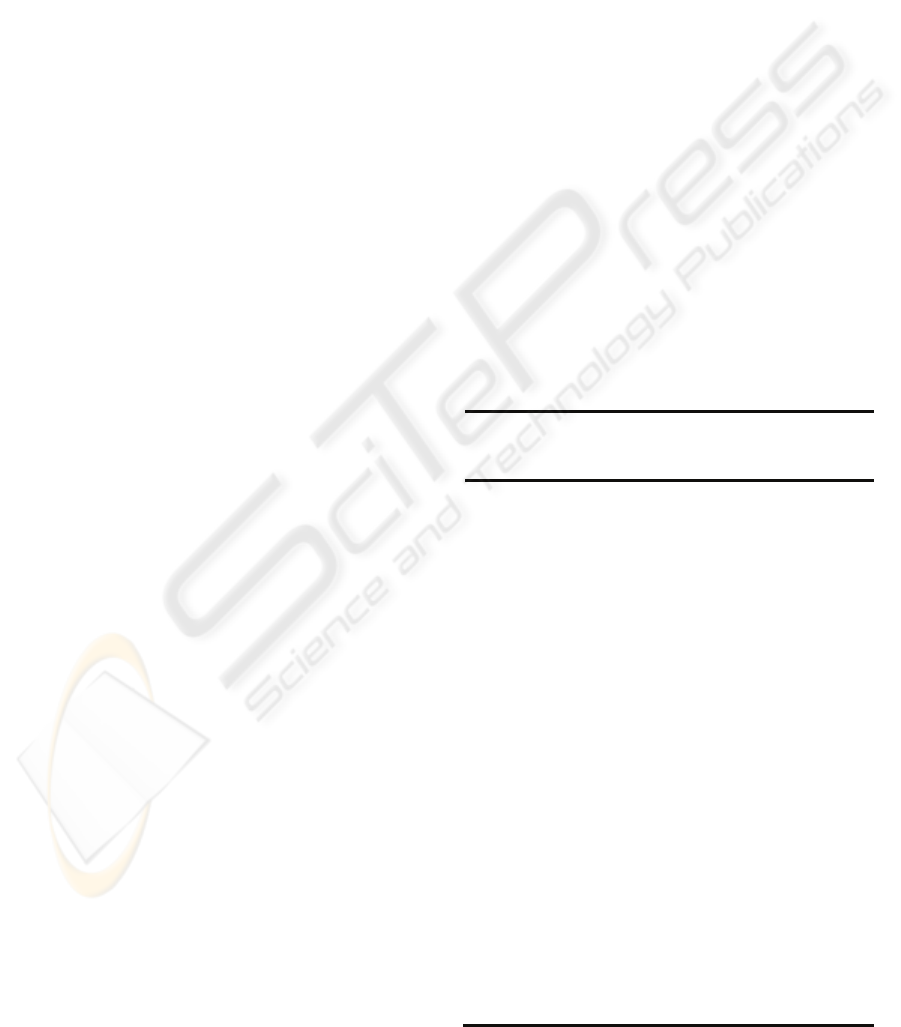
Table 1: Computational results of the stand-aloneACS.
Problem Optimal
value
Best value Deviation of
the Best Value
%
Wt100-1 5988 8795 47
Wt100-2 6170 7724
25
Wt100-3 4267 5672
33
Wt100-4 5011 6426
28
Wt100-5 5283 7709
46
Wt100-6 58258 76424
31
Wt100-7 50972 83231
63
Wt100-8 59434 90968
53
Wt50-1 2134 2832
33
Wt50-2 1996 2557
28
Wt50-3 2583 2583
0
Wt50-4 2691 3278
22
Wt50-5 1518 2568
69
Wt50-6 26276 34167
30
Wt50-7 11403 13668
20
Wt50-8 8499 9713
14
Wt40-1
913 913 0
Wt40-2
1225 1431 17
Wt40-3
537 537 0
Wt40-4
2094 2163 3
Wt40-5
990 1090 10
Wt40-6 6955
8151 17
Wt40-7 6324
9083 44
Wt40-8 6865
11474 67
A HYBRID METAHEURISTIC FOR SOLVING SINGLE MACHINE SCHEDULING PROBLEM
71
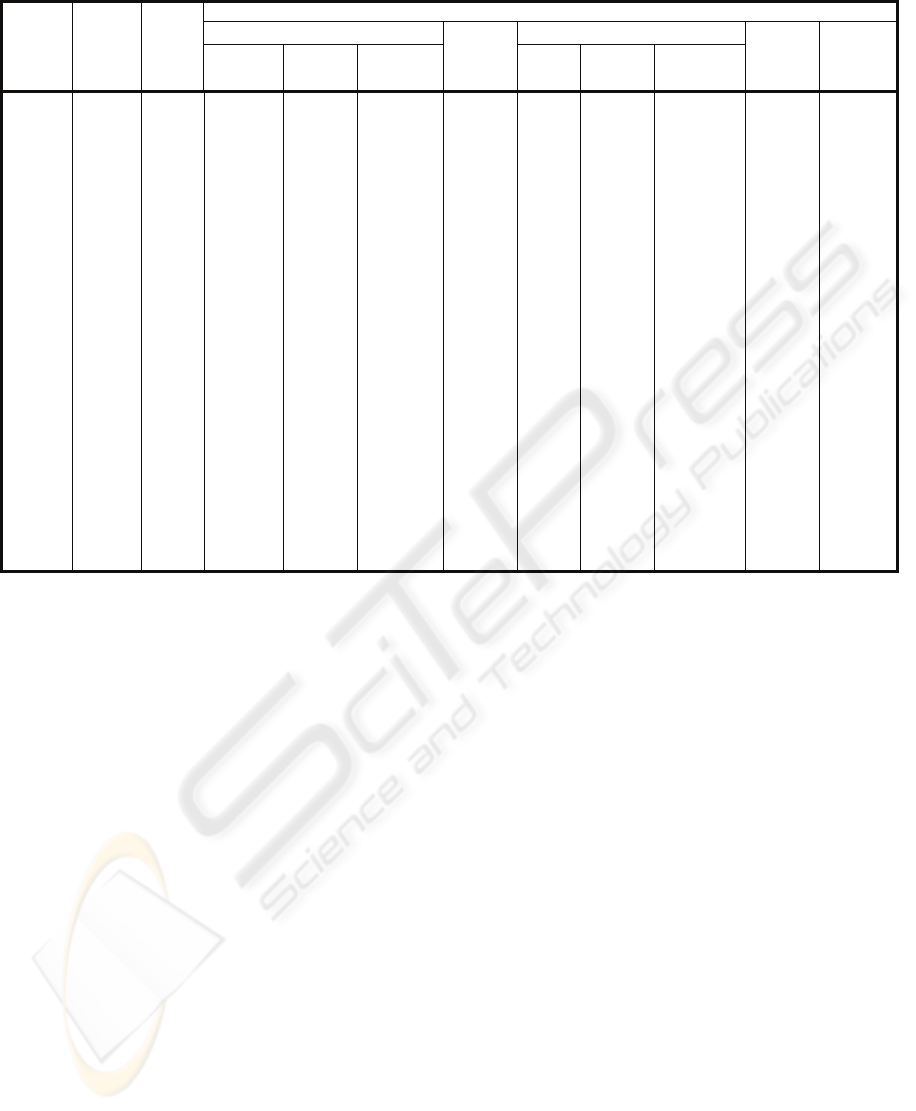
Table 2: Computational results with the hybrid system.
Problem
Optimal
value
Best
ACS
value
Best value of ACS+KA with:
M=1000
M=2000
M=5000
M=10000
Deviation
%
Best value
D
eviation%
Computing
time[s]
Best
value
Deviation
%
Computing
time[s]
Wt100-1 5988 8795
6310
5.38
1.906
6314 6076 1.47
8.609
6215 3.79
Wt100-2 6170 7724
6450 4.54 1.906
6182 6182 0.19
8.641
6182 0.19
Wt100-3 4267 5672
4415 3.47 1.938
4336 4372 2.46
8.688
4297 0.70
Wt100-4 5011 6426
5094 1.66 1.922
5014 5058 0.94
8.797
5069 1.16
Wt100-5 5283 7709
5433 2.84 1.938
5435 5283 0.00
8.703
5367 1.59
Wt100-6 58258 76424
60445 3.75 2.063
63804 63341 8.72
9.516
59845 2.72
Wt100-7 50972 83231
52349 2.70 2.063
55788 54822 7.55
9.484
53063 4.10
Wt100-8 59434 90968
62907 5.84 2.063
62146 62636 5.39
9.469
62817 5.69
Wt50-1 2134 2832
2134 0.00 1.063
2134 2134 0.00
4.891
2134 0.00
Wt50-2 1996 2557
1998 0.10 1.078
2009 2011 0.75
4.953
2008 0.60
Wt50-3 2583 2583
2619 1.39 1.078
2583 2583 0.00
5.031
2583 0.00
Wt50-4 2691 3278
2691 0.00 1.078
2691 2691 0.00
5.000
2691 0.00
Wt50-5 1518 2568
1518 0.00 1.078
1518 1604 5.67
5.031
1518 0.00
Wt50-6 26276 34167
27077 3.05 1.188
26758 26509 0.89
5.500
26403 0.48
Wt50-7 11403 13668
11403 0.00 1.156
11522 11733 2.89
5.375
11403 0.00
Wt50-8 8499 9713
8700 2.36 1.156
8760 8742 2.86
5.375
8700 2.36
Wt40-1 913 913
913 0.00 0.891
913 913 0.00
4.188
913 0.00
Wt40-2 1225 1324
1225 0.00 0.922
1225 1225 0.00
4.250
1225 0.00
Wt40-3 537 573
537 0.00 0.922
537 537 0.00
4.281
537 0.00
Wt40-4 2094 2098
2094 0.00 0.922
2094 2094 0.00
4.281
2094 0.00
Wt40-5 990 1090
990 0.00 0.906
990 990 0.00
4.203
990 0.00
Wt40-6 6955 12949
7024 0.99 0.984
6955 7055 1.44
4.609
6955 0.00
Wt40-7 6324 7087
6636 4.93 1.000
6324 6437 1.79
4.609
6571 3.91
Wt40-8 6865 11015
6919 0.79 1.000
6881 6919 0.79
4.594
6901 0.52
jobs at the current iteration. This list is updated
dynamically for each step and each ant. Every ant
keeps a copy of the best found solution until the
current iteration. Each time the ant adds a new job j
to the current sequence, this job is deleted from the
copy of the best found solution. In our
implementation, the first 20 jobs, which belong to
the best solution and that are not already placed,
form the candidate list.
Computational tests were performed in order to
compare the proposed hybrid system (ACS+KA)
with a stand-alone ACS. The software developed
was coded in C and the tests were performed on a
PC with 2330 MHz Intel processor.
The two algorithms were applied to the same
instances of SMSP. Three sets of 8 problems each
with 40 (Wt40-x, x=1,…,8), 50 (Wt50-x, x=1,…,8),
and 100 (Wt100-x, x=1,…,8) jobs were considered.
Consequently, for both, the stand-alone ACS and the
hybrid system, the computational tests were done on
a set of 24 instances of the SMSP. These problems
were downloaded from the site
http://people.brunel.ac.uk/~mastjjb/jeb/orlib/files/,
which supplies data and the optimal solution for
some Single Machine Scheduling Problems.
The parameters used by the ACS in the two systems
are: N=10, q
0
=0.9, α=0.9, β=2. The two systems
evolved on the same number of iterations. Hence,
the stop criterion (see fig. 2) was an upper limit for
the general number of iterations. In this case this
upper limit was 100.
The results obtained using only the stand-alone
ACS for the 3 sets of problems are presented in table
1. The "optimal value" column contains the value of
the optimization criterion for the optimal solution of
the problem. For a given instance of SMSP, this
value is generally unknown. The "best value" is the
value of the optimization criterion for the best
solution produced by the stand-alone ACS. The last
column gives the deviation of the best value from
the optimal one expressed in percents.
The hybrid system ACS+KA ran also over 100
general iterations, but with different values for the
number of iterations, denoted M, of the stochastic
searching process implemented by KA in each step 2
of the general algorithm (see fig. 2). The results are
shown in Table 2.
Four values for M were considered: 1000, 2000,
5000, 10000. The deviation of the best
solution from the optimal one is given only for
M=5000 and M=10000 iterations. With M=10000
iterations, the hybrid system finds the optimal
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
72
solution in almost all the cases.
Despite the fact this number of iterations doesn't
take much time, it is not necessary to adopt such a
great number of iterations.
Let's remark we are interested in obtaining a good
solution and not the optimal one, especially since it
is unknown. Because the deviation is satisfactory for
M=5000, this number of iterations is recommended
for SMSP with 100 jobs. The same conclusion may
to be drawn both for 40 or 50 jobs problems. The
value of M may decrease, with very satisfactory
results, to 1000 or 2000 iterations.
Comparing the two tables, one can see that the
hybrid system is more efficient. Despite the fact the
stand-alone ACS evolves during 100 iterations, it
doesn't reach the same results as the hybrid system.
When M=5000, the price to pay is the very
acceptable increasing of the execution time, that
means 5, 6 or 10 seconds for 40, 50 or 100 jobs
problems, respectively.
The table 3 shows a comparison between the hybrid
system ACS+KA and the earliest due date algorithm
(EDD).
Table 3: Comparison between EDD and ACS+KA.
Problem EDD ACS+KA
M=5000
Best
value
Deviation
%
Best
value
Deviation
%
Wt100-1 14138 136.11
6076 1.47
Wt100-2 19096
209.50
6182 0.19
Wt100-3 17538
311.01
4372 2.46
Wt100-4 13308
165.58
5499 9.74
Wt100-5 20218
282.70
5283 0.00
Wt100-6 13932
139.16
63341 8.72
Wt100-7 16009
214.08
54822 7.55
Wt100-8 16534
178.19
62636 5.39
Wt50-1 7306
242.36
2134 0.00
Wt50-2 7219
261.67
2011 0.75
Wt50-3 4983
92.92
2583 0.00
Wt50-4 6423
138.68
2691 0.00
Wt50-5 6257
312.19
1604 5.67
Wt50-6 57699
119.59
26509 0.89
Wt50-7 41718
265.85
11733 2.89
Wt50-8 43030
406.29
8742 2.86
Wt40-1
1588 73.93
913 0.00
Wt40-2
5226 326.61
1225 0.00
Wt40-3
3051 468.16
537 0.00
Wt40-4
5527 163.94
2094 0.00
Wt40-5
4030 307.07
990 0.00
Wt40-6 23691
240.63
7055 1.44
Wt40-7 33547
430.47
6437 1.79
Wt40-8 23032
235.50
6919 0.79
One can see that the deviation of EDD is
unsatisfactory and the solution obtained with this
algorithm can be only an initial solution for a more
efficient algorithm, like ACS+KA.
7 CONCLUSIONS
The paper has proposed a metaheuristic for solving
SMSP, implemented by a hybrid system made up of
an Ant Colony System and a parallel version of the
Kangaroo Algorithm.
The KA is a very simple and efficient intensifier
that replaces the local optimization proposed in other
papers.
The functioning of this hybrid system was
compared with a stand-alone ACS. The tests have
proven that this structure is more efficient than those
of the simple ACS. The number of general iterations
and the iterations number of the stochastic descent
process are parameters of the algorithm that have to
be tuned according to the size of the problem. Very
good solutions were found in a quite acceptable time
and number of iterations. Moreover, the increasing
of the execution time is quite acceptable.
REFERENCES
Bauer A., Bullnheimer B., Hartl R.F. And Strauss C.,
1999. An ant colony optimization approach for the
single machine total tardiness problem, In Proc. of
CEC’99, pages 1445–1450, IEEE Press, Piscataway,
NJ,.
Beckers R., Deneubourg J.L., And Goss S., 1992. Trails
and U-turns in the selection of the shortest path by the
ant Lasius Niger, Journal of Theoretical Biology, vol.
159, pp. 397–415.
Dorigo, M., Maniezzo V. And Colorni A., 1996. The Ant
System: Optimization by a colony of cooperating
agents, IEEE Transactions on Systems, Man, and
Cybernetics–Part B, 26, 29–41,
Dorigo M. And Gambardella L.M., 1997a. Ant colonies
for the traveling salesman problem, BioSystems, 43,
73–81.
Dorigo M. And Gambardella L.M., 1997b. Ant colony
system: A cooperative learning approach to the
traveling salesman problem, IEEE Transactions on
Evolutionary Computation, 1(1):53-66.
Fleury G., 1995. Application des méthodes stochastiques
inspirées du recuit simulé à des problèmes
d'ordonnancement, Automatique Productique
Informatique Industrielle vol. 29-no 4-5, pp. 445-470.
Garey M; Johnson D. ,1995. Computers and Intractability:
a guide to the theory on NP-completeness- New York
W. H. Freeman and Co. Publishers.
A HYBRID METAHEURISTIC FOR SOLVING SINGLE MACHINE SCHEDULING PROBLEM
73

Gloverf, 1989. Tabu Search- part i. ORSA Journal of
Computing vol. 1 1989 pp. 190-206.
Kirkpatrick S. et all, 1983 -Optimization by simulated
annealing- Science vol.220 no.4598 May 1983 pp 671-
680
Madureira A. Et All, 2000. A GA Based Scheduling
System for Dynamic Single Machine Scheduling
Problem, ISATP 2000, Fukuoka.
Mahfoud S.; Goldberg D, 1995. Parallel recombination
simulated annealing: A genetic algorithm. Parallel
computing vol. 21 1995 pp. 1-28.
Matthijs Den Besten, Stützle T. And Dorigo M., 2000 Ant
Colony Optimization for the Total Weighted Tardiness
Problem, In Deb et al, editors, Proceedings of PPSN-
VI, Sixth International Conference on Parallel
Problem Solving from Nature, volume 1917 of LNCS,
pages 611-620.
Minzu V. And Henrioud J.M, 1998. Stochastic algorithm
for the tasks assignment in single or mixe model
assembly lines, European Journal of Automation, Vol.
32 No 7-8, pp 831-851.
Papadimitriou C.; Steiglitz K., 1982. Combinatorial
Optimization: Algorithms and Complexity - Printice-
Hall.
Taillard et al., 1998. La programmation à mémoire
adaptative ou l'évolution des algorithmes évolutifs.
Calculateurs parallèles vol. 10 no. 2 April 1998 pp.
117-140.
Vaessens R. et al, 1992. A local search template. Parallel
Problem Solving From Nature R. Manner and B.
Manderick Edition Université Libre de Bruxelles pp.
67-76 Belgium.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
74
