
A MHT-BASED ALGORITHM FOR PERFORMANCE ESTIMATION
IN DT-MRI BAYESIAN TRACKING METHODS
L. M. San Jos´e Revuelta
ETSI Telecommunication, University of Valladolid, Campus Miguel Delibes, Valladolid, Spain
Keywords:
DT-MRI. Fuzzy system, Medical image processing, Reliability estimation, Bayesian modelling.
Abstract:
This paper deals with the development of a recursive fuzzy inference system that can be applied to estimate the
error probability of several tracking algorithms used in medical image processing systems. Specifically, we
are interested in the fiber bundles estimation process (fiber tracking) in diffusion tensor (DT) fields acquired
via magnetic resonance imaging (MRI). As tracking algorithm we have considered a variation of the Bayesian
tracking scheme proposed by Friman and Westin. This paper studies the analogies between this tracking
approach and a typical Multiple Hypotheses Tracing (MHT) system, for which fuzzy systems are closely
related. This comparison leads to the development of a SAM (Standard Additive Model) fuzzy system that
on-line estimates the certainty of the estimated fiber tracts. Its low computational load as well as its efficiency
in very isotropic volumes are its main advantages.
1 INTRODUCTION
The technique of Diffusion Tensor Magnetic Reso-
nance Imaging (DT-MRI) measures the diffusion of
hydrogen atoms within water molecules in 3D space.
Since in cerebral white matter most random motion of
water molecules are restricted by axonal membranes
and myelin sheets, diffusion anisotropy allows de-
piction of directional anisotropy within neural fiber
structures (Ehricke, 2006).
There exist many important applications for white
matter tractography: brain surgery, white matter visu-
alization using fiber traces and inference of connec-
tivity between different parts of the brain, to name a
few.
The great majority of DTI visualization tech-
niques focuses on the integration of sample points
along fiber trajectories and their three-dimensional
representation (Mori, 2002). These streamline-based
approaches are called fiber tracking and they usually
make use only of the principal eigenvector of the dif-
fusion ellipsoid as an estimate of the predominant di-
rection of water diffusion in a voxel (Ehricke, 2006).
Nevertheless, and due to some deficiencies in these
tracking algorithms and several shortcomings inher-
ent in datasets (noise, partial voluming), they may de-
pict fiber tracts which do not exist in reality or miss to
visualize important branching structures. In order to
avoid misinterpretations, the viewer of the visualiza-
tions must be provided with some information on the
uncertainty of a depicted fiber and of its presence in a
certain location. This task can be efficiently tackled if
a Bayesian approach is used.
In this paper, we have considered a Neural
network-based simplified implementation of a well-
known Bayesian tracking algorithm (Friman, 2005).
Specifically, this algorithm has been implemented
with a simplification method based on those used in
(San Jos´e, 2005) in the context of a Bayesian detector
for digital multiuser communications.
Our goal is to establish a parallelism between a
standard Bayesian tracking scheme and another pro-
cedure, the Multiple Hypotheses Tracking (MHT)
strategy (Alberola, 1999; Reid, 1979), which is di-
rectly related to fuzzy logic and, to our knowledge,
has not been directly applied to fiber estimation. The
thus developed fuzzy system will calculate more reli-
able estimates of the depicted tracts certainty.
2 BAYESIAN TRACKING
ALGORITHM
Bayesian modelling has already been applied to fiber
tracking. However, its main drawback is the large
computational load involved. In this paper we pro-
pose to use the Bayesian algorithm of Friman and
445
San José Revuelta L. (2009).
A MHT-BASED ALGORITHM FOR PERFORMANCE ESTIMATION IN DT-MRI BAYESIAN TRACKING METHODS.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 445-448
DOI: 10.5220/0002213204450448
Copyright
c
SciTePress

Westin (Friman, 2005) with the Stochastic Draw-
ing Sampling Selection (SDSS) scheme developed
in (San Jos´e, 2005) for complexity limitation. This
Bayesian algorithm is next described.
The goal of the Bayesian modelling is to find a pdf
of the local fiber orientation
1
p(
ˆ
v
k
|
ˆ
v
k−1
, D), where
vectors
ˆ
v
k
and
ˆ
v
k−1
contain the path samples up to
time k or k− 1, respectively, and D denotes the mea-
sured diffusion data. If a model that relates the diffu-
sion measurements D with the underlying tissue prop-
erties and architecture is assumed, then it must con-
tain at least one fiber direction
ˆ
v
k
and a set of nui-
sance parameters denoted by θ. Thus, applying the
Bayes theorem,
p(
ˆ
v
k
, θ|
ˆ
v
k−1
, D) =
p(D|
ˆ
v
k
, θ)p(
ˆ
v
k
|
ˆ
v
k−1
)p(θ)
p(D)
(1)
where we have assumed that the prior distribution can
be factorized p(
ˆ
v
k
, θ|
ˆ
v
k−1
) = p(
ˆ
v
k
|
ˆ
v
k−1
)p(θ). The
main problems found are (Friman, 2005): (i) the cal-
culation of p(
ˆ
v
k
|
ˆ
v
k−1
, D) needs to marginalize Eq. (1)
over θ, and (ii) the normalizing factor
p(D) =
Z
ˆ
v
k
,θ
p(D|
ˆ
v
k
, θ)p(
ˆ
v
k
|
ˆ
v
k−1
)p(θ) (2)
is difficult to evaluate due to the high-dimensional in-
tegral and the intractable integrand. Eq. (1) has to be
calculated in every step in the sequential sampling of
the fiber paths and, unless an approximation for the
integral in Eq. (2) is found, the cost is prohibitive.
Some attempts have been made to approach this
problem. In (Friman, 2005), a solution based on
drawing samples from a pdf defined on the unit sphere
is proposed. This is accomplished by evaluating the
pdf at a sufficiently large number of points evenly
spaced over the unit sphere, effectively approximating
the continuous pdf with a discrete pdf, from which it
is straightforward to draw the random samples. How-
ever, the continuous pdf must be densely enough sam-
pled, specifically, Friman proposes to use 2,562 pre-
defined points thus involving an important computa-
tional burden. At this point, we propose to use a sam-
pling strategy where those points (hypotheses, in the
Bayesian terminology of (San Jos´e, 2005)) with the
largest probabilities have more chances to be selected.
However, notice that some randomness is introduced
in the selection procedure. This way, those direc-
tions with the highest probability to prolong the cur-
rent fiber path will probably be selected. Specifically,
we have implemented the Stochastic Drawing Sam-
pling Selection (SDSS) algorithm in order to reduce
the number of sampled points in the above-mentioned
unit sphere.
1
Using the notation found in (Friman, 2005).
3 COMPARISON BETWEEN
BAYESIAN AND MHT
A fuzzy version of Reid’s classical Multiple Hypothe-
ses Tracking (MHT) algorithm (Reid, 1979) was pro-
posed in (Alberola, 1999). This system is based
on the likelihood discrimination and it was applied
to the tracking of natural language text-based mes-
sages. It shows the possibility of handling informa-
tion about any time-varying phenomenon, as long as
the phenomenon can be described by means of a few
keywords, and the phenomenon itself is statistically
causal in the sense that the distribution of future states
is statistically dependent on the past observed states.
It is not difficult to see the following parallelism
that leads to the possibility of a tract probability es-
timation based on text-messages (fuzzy-messages):
(i) the natural-language messages in (Alberola, 1999)
and the noisy DT-MR image constitute, in both cases,
the source of noisy or ambiguous information, (ii) the
tracks used in the MHT algorithm, which are defined
as sequences of associated symbols, can be clearly as-
sociated to the possible sequences of points in the 3D
space, in the tracking context, (iii) the MHT system
associates multiple messages generated along time by
using a specific stochastic model for the applications’
dynamics. In our case, this model can be the infor-
mation provided by the measured anisotropy, (iv) the
term target denotes some condition that generates ob-
servable phenomena. In our context, these targets are
the sequences of points that define a tract.
As a consequence, the MHT system can be viewed
as a Bayesian approach for multiple targets track-
ing. Theoretically, this algorithm conserves all the
hypotheses that explain the observation until certain
time, together with an estimation of the probability
of each hypothesis. At the end, the hypothesis with
the highest likelihood is taken as the solution. On
the other hand, the Bayesian tracking algorithm main-
tains a finite set of hypotheses (section 2) with their
associated probabilities, and a tract is coloured and
visualized based on these data.
4 PROPOSED FUZZY SYSTEM
In this section we propose a recursive SAM (Standard
Additive Model) fuzzy subsystem that allows to mon-
itor the performance of a DT-MRI tracking system.
The SAM model allows to work with linguistic de-
scriptions and ambiguities. This kind of description
allows to fuzzy-quantify the errors in the tractogra-
phy problem. On the other hand, the uncertainty in the
prediction of the future positions found in the MHT of
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
446
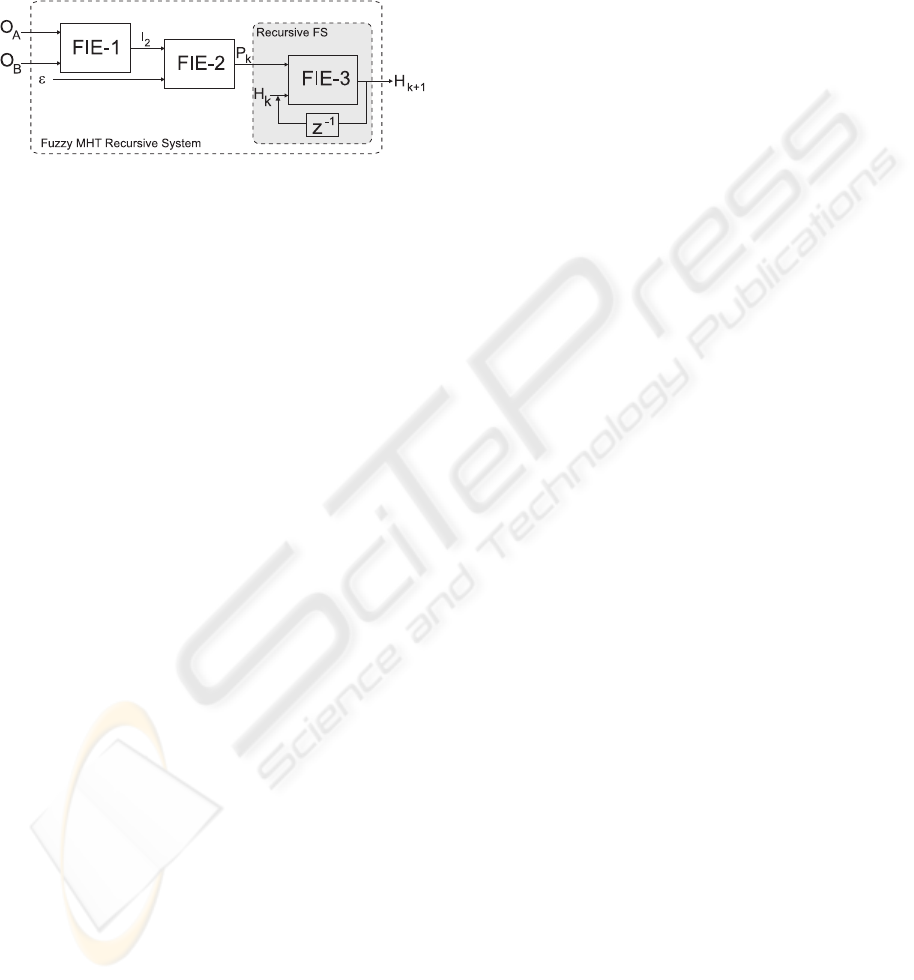
(Alberola, 1999), resembles the creation of new fiber
tracts based on the previous ones.
The system here proposed consists in three con-
nected fuzzy inference engines (FIEs) –see Fig. 1. It
is necessary to develop an algorithm where the inputs
to the MHT system have some correlation in time.
Figure 1: Recursive SAM fuzzy system for estimation of
the error probability of the estimated error tracts.
The inputs O
A
and O
B
to the FIE-1 are two dif-
ferent tracts (hypotheses) estimated by the algorithm
sharing in common the first and the last points (in
practice, both tracts must start and finish in near vox-
els). These tracts are prolonged on one side with a
new sample every time a new point is considered (at
every iteration of the tracking algorithm), while the
last point of the tracts is lost. This way, compared
tracts have always the same length.
In order to evaluate the similarity between two
tract hypotheses O
A
and O
B
, it is necessary to quan-
tify their proximity using a 3D distance. As a con-
sequence, a similarity coefficient that depends on the
distance between these two considered tracts can be
assigned.
In order to implement a fuzzy system, we must es-
tablish a relation between this crisp value (defined in
[0− K]) and the fuzzy sets where a linguistic variable
is defined, i.e.,
K
K − 1
.
.
.
1
0
−→
Very Unlikely
Unlikely
.
.
.
Likely
Very Likely
(3)
This allows to obtain the possible fuzzy values of
I
2
(output of the first FIE and input to the second).
Next, we relate the prediction error ε used as input
in the FIE-2 with the anisotropy observed in the last
(currently processed) point of the tract. This way, if a
large anisotropy is obtained, the tract would be rather
smooth in the proximity of the current voxel and ε
will take a small value for those hypotheses (future
points to expand the current tract) that involve a small
change in the fiber direction. On the other hand, when
the anisotropy is small (isotropic area), parameter ε
would be the same for every direction (hypotheses).
The value of ε must, also, be fuzzified.
This way, FIE-1 estimates the likelihood of two
close tracts while FIE-2 weights this estimate with re-
spect to the prediction error (that is inversely propor-
tional to the anisotropy) and obtains a second likeli-
hood. This value is used to update the global like-
lihood (or global reliability), which is a measure of
the tracking estimation error probability. This third
process is performed by FIE-3. Thus, this third block
updates, with a feedback system, the previous system
knowledge every time a new point is processed.
5 NUMERICAL RESULTS
5.1 Synthetic Images
First, four different synthetic DT-MRI data in a 50×
50 × 50 grid have been generated (three of them –
cross, earth and log– can be seen in Fig. 3 of (San-
Jos´e, 2006) while the fourth one, named star, –the
most complex one– is new. To make the simulated
field more realistic, Rician noise was added in the dif-
fusion weighted images which were calculated from
the Stejskal-Tanner equation using the gradient se-
quence in (Westin, 2002) and a b-value of 1000.
The desired noisy synthetic diffusion tensor data
was obtained using an analytic solution to the
Stejskal-Tanner equation. The eigenvectors in the
isotropic areas were λ
1
= λ
2
= λ
3
, while in the re-
maining voxels of the image λ
1
= 7, λ
2
= 2, λ
3
= 1.
In our study, the SNR varies from 13 to 29 dB.
The “star” image consists of six orthogonal sine
half-waves, each of them with arbitrary radius. Notice
that this scenario constitutes the most complicated sit-
uation since the diffusion field experiments variations
with the three coordinate axes and there exists a cross-
ing region.
The reliability of four approaches for estimat-
ing the tracts certainty is first studied. These meth-
ods are: (i) the tracking algorithm described in
(San-Jos´e, 2006), (“ALG”), (ii) the Bayesian algo-
rithm described in section 2 (“BAY”), (iii) ALG with
the fuzzy engine for probability of error estimation
(“ALG+Fuzzy”), and (iv) BAY with the fuzzy pro-
cedure (“BAY+Fuzzy”). Figure 2 shows the mean
probability of wrong estimation (average value in 25
executions) and Table 1 presents the mean variance
of these estimators, for five different signal qualities
ranging from 13 to 29 dB.
Analyzing the results it can be seen that: (i) the
probability of error increases as the SNR of the orig-
inal image improves; more complex images have
A MHT-BASED ALGORITHM FOR PERFORMANCE ESTIMATION IN DT-MRI BAYESIAN TRACKING
METHODS
447
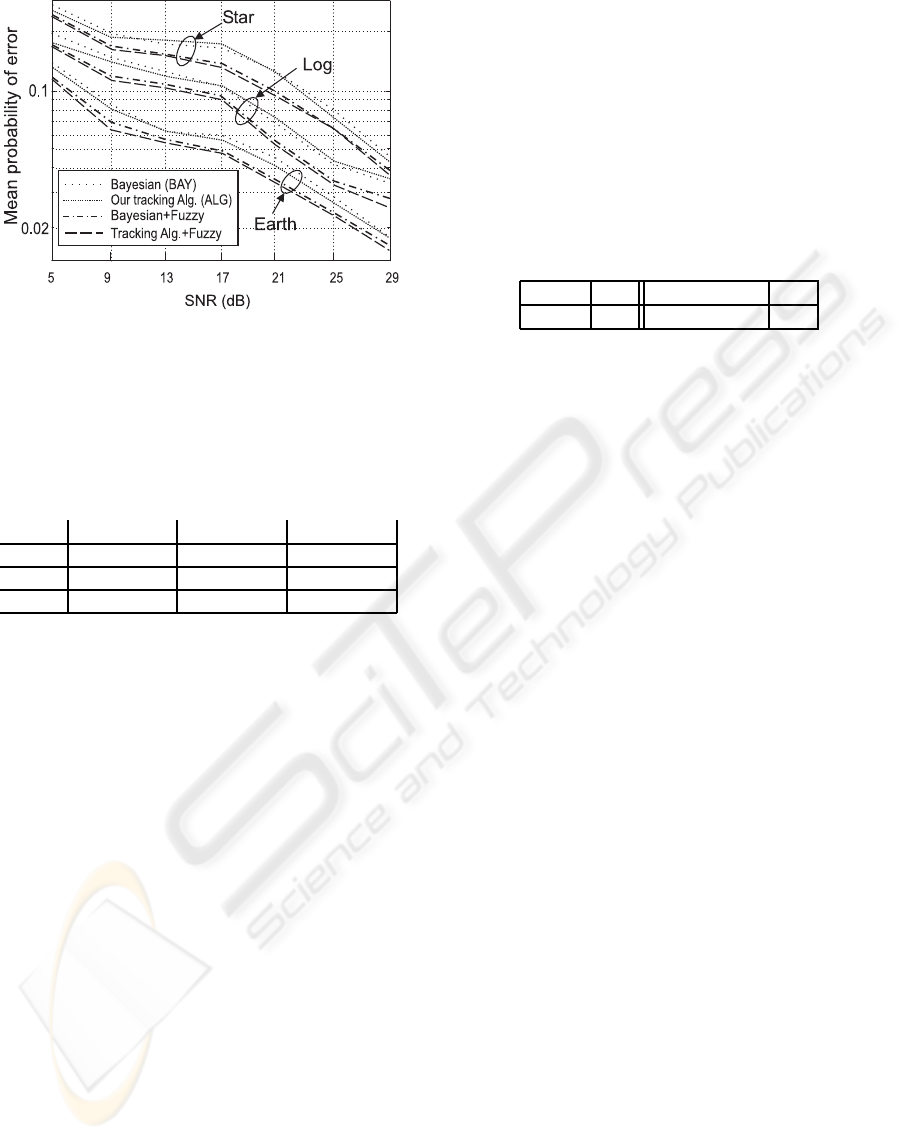
Figure 2: Mean probability of error for the tracking meth-
ods studied, with and without the fuzzy procedure for esti-
mation of the probability of error. Three synthetic images
were used: earth, log and star.
Table 1: Variance of the tracking error estimation method.
Each cell represents the values for: BAY/ALG/Fuzzy-
estimation.
SNR (dB)
13 21 29
Earth 4.2/3.7/1.6 2.3/1.9/0.7 1.4/0.9/0.2
Log 4.5/4.1/2.0 2.8/2.3/0.9 1.5/0.9/0.3
Star 6.4/5.1/2.8 3.2/2.7/1.5 2.2/1.7/0.7
larger tracking error estimates, (ii) in general, the ac-
curacy of the ALG method is slightly better than the
BAY approach, and (iii) the tracking error of both
methods (BAY and ALG) improves notably when the
fuzzy engine is used for estimation. These figures are
closer to the real probability of error when a human
expert manually evaluates the tracts obtained.
Table 1 shows how the fuzzy procedure greatly
decreases the variance of the estimator, leading to
more robust and accurate estimations, specially for
low quality images. The values shown in each cell
represent the variance of the different estimation ap-
proaches: BAY, ALG and the fuzzy-based estimation
using the strategy proposed in section 4. The fuzzy
method obtained very similar results when combined
to both BAY and ALG. Thus, only one value is in-
cluded in each cell.
It can be observed that the fuzzy approach gets
estimates with much smaller variances. This esti-
mation procedure is scarcely influenced by both the
SNR of the image and image complexity (in terms of
anisotropy). This implies that the estimation conver-
gence will not depend on the presence of branching
or crossing areas of the MR figure –as it would be the
case in real DT-MR images.
5.2 Real Images
Finally, we have applied the proposed tracking algo-
rithm to a real DT-MR image. Specifically, we have
selected the corpus callosum of the brain.
The variance of the same four estimation meth-
ods has been evaluated. Results are shown in Table
3. Once again the improvement on the estimates reli-
ability can be observed for both BAY and ALG.
Table 2: Variance of different probability of error estimation
methods.
BAY: 8.4 BAY+fuzzy: 3.8
ALG: 7.4 ALG+fuzzy: 3.2
If noisy voxels are present along the paths of in-
terest it is worth noting that the MHT-based fuzzy
method is less sensitive to these variations. The rea-
son is that the MHT performs a kind of smoothing
or data filtering, which decreases the disturbing ef-
fects of the occasionally high noisy samples (this is
addressed using the FIE-3 in Fig. 1).
ACKNOWLEDGEMENTS
The authors acknowledge the Spanish CICYT for re-
search grant TEC2007-67073/TCM.
REFERENCES
Alberola, C., C. G. V. (1999). Tracking with text-based
messages. In IEEE Intell. Systems (14).
Ehricke, H. H., K. U. G. W. (2006). Visualizing mr-dt fields
by dynamic fiber tracking and uncertainty mapping.
In Computers & Graphics (30).
Friman, O., W. C.-F. (2005). Uncertainty in white mat-
ter fiber tractography. In Proc. MICCAI 2005, LNCS
3749.
Mori, S., v. Z.-P. C. M. (2002). Fiber tracking: principles
and strategies – a technical review. In Nuclear Mag-
netic Resonance in Biomedicine (15).
Reid, D. B. (1979). An algorithm for tracking nmultiple
targets. In IEEE Tr. Automat. Contr., vol. AC-24.
San Jos´e, L. M. (2005). Hypotheses control-based strategies
for the simplification of bayesian multiuser detectors.
In Proc. IEEE XIV Workshop on Machine Learning
for Signal Processing.
San-Jos´e, L. M., M. M. A. C. (2006). A new method for
fiber tractography in diffusion tensor magnetic reso-
nance images. In Proc. ICSIP 2006, vol. I.
Westin, C.-F. e. a. (2002). Processing and visualization for
dt-mri. In Med. Image Analysis (6).
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
448
