
COLLABORATIVE EXPLORATION IN GRID DOMAINS
Constructive Conjecture of a Polynomial Time Complexity
Yaniv Altshuler
Deutsche Telekom Laboratories, Ben Gurion University, Beer Sheva, Israel
Alfred M. Bruckstein
Israel Institute of Technology, Computer Science Department, Technion, Technion City, Haifa 32000, Israel
Israel A. Wagner
IBM Haifa Research Labs, Haifa, Israel
Keywords:
Swarm algorithm, Decentralized search, Cooperative exploration, Grid exploration, Time complexity.
Abstract:
This work discusses the problem of exploration of an unknown environment using a collaborative group of
simple agents. While this problem was known to be of a non-polynomial time complexity, it was speculated
in the past that in grid domains the completion time of this problem is much lower (although analytic proofs
were not available hitherto). In this work we present a preliminary result concerning a constructive analytic
constraint for guaranteeing that the time complexity of this problem in grid domains is indeed polynomial.
1 INTRODUCTION
In recent years significant research efforts have
been invested in design and simulation of multi-
agent robotics and intelligent swarms systems —
see e.g. (Hettiarachchi and Spears, 2005; Wag-
ner and Bruckstein, 2001; Steels, 1990) or (Arkin,
1990; Mataric, 1992; Haynes and Sen, 1986) for biol-
ogy inspired designs (behavior based control models,
flocking and dispersing models and predator-prey ap-
proaches, respectively), (Gerkey and Mataric, 2002;
Rabideau et al., 1999; Thayer et al., 2000) for eco-
nomics applications and (Chevallier and Payandeh,
2000) for a physics inspired approach).
Tasks that have been of particular interest to re-
searchers in recent years include synergetic mis-
sion planning (Alami et al., 1998), swarm control
(Mataric, 1994), human design of mission plans
(MacKenzie et al., 1997), role assignment (Can-
dea et al., 2001), multi-robot path planning (Ya-
mashita et al., 2000), formation generation (Gordon
et al., 2003), formation keeping (Balch and Arkin,
1998), exploration and mapping (Rekleitis et al.,
2003), cleaning (Wagner et al., 2008) target tracking
(Shucker and Bennett, 2005) and many more.
Unfortunately, the mathematical \ geometrical
theory of such multi-agents systems is far from being
satisfactory, as pointed out in (Beni and Wang, 1991;
E.Bonabeau et al., 1999; Efraim and D.Peleg, 2007;
Olfati-Saber, 2006) and many other papers.
One of the most interesting challenges for a
robotics swarm system is the design and analysis
of a multi-robotics system for searching and explo-
ration (in either known or unknown areas). For ex-
ample, works discussing cooperative searching tasks
for static or dynamic targets can be found in (Alt-
shuler et al., 2005b; Kerr and Spears, 2005; Passino
et al., 2002; Polycarpou et al., 2001; Stone, 1975;
Koopman, ; Vincent and Rubin, 2004) whereas ex-
amples for cooperative coverage of given regions are
presented in (Rekleitisy et al., 2004; Rekleitis et al.,
2005; Kong et al., 2006).
In this work we discuss the general problem of
collaborative search of an unknown grid domains by
a decentralized group of ant-like robots, while trying
to establish an analytic proof for its time complex-
ity. The strategy that will be used will based on the
presentation of an “archetype problem”, to which an
analytic upper bound over its completion time will be
presented. From this bound, the time complexity of
252
Altshuler Y., M. Bruckstein A. and A. Wagner I. (2009).
COLLABORATIVE EXPLORATION IN GRID DOMAINS - Constructive Conjecture of a Polynomial Time Complexity.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 252-257
DOI: 10.5220/0002214402520257
Copyright
c
SciTePress

the problem will be derived, and shown to be polyno-
mial (when the bound predicts that the problem can
be solved). Cases where the bound does not predict
a successful completion of the mission are not treated
here, although it is our belief that further analysis of
the bound may yield a similar result for these cases as
well.
Existing approaches and results are discussed in
Section 2, while a conjecture concerning the time
complexity in grid domains is presented in Section 3.
2 RELATED WORK AND
MOTIVATION
In general, most of the techniques used for the task
of a distributed coverage use some sort of cellular
decomposition. For example, in (Rekleitisy et al.,
2004) the area to be covered is divided between the
agents based on their relative locations. In (Butler
et al., 2001) a different decomposition method is be-
ing used, which is analytically shown to guarantee a
complete coverage of the area. Another interesting
work is presented in (Acar et al., 2001), discussing
two methods for cooperative coverage (one proba-
bilistic and the other based on an exact cellular de-
composition). All of the works mentioned above,
however, rely on the assumption that the cellular de-
composition of the area is possible. This in turn, re-
quires the use of memory resources, used for stor-
ing the dynamic map generated, the boundaries of the
cells, etc’. As the initial size and geometric features
of the area are generally not assumed to be known
in advance, agents equipped with merely a constant
amount of memory will most likely not be able to use
such algorithms.
Surprisingly, while existing works concerning dis-
tributed (and decentralized) coverage often present
analytic proofs for the ability of the system to guaran-
tee the completion of the task (for example, in (Acar
et al., 2001; Butler et al., 2001; Batalin and Sukhatme,
2002)), unfortunately, most of them lack analytic
bounds for the coverage time (although in many cases
an extensive amount of empirical results of this na-
ture is made available). It can well be said that the
time complexity of this problem, as well as the simi-
lar results for a variety of its derivatives, are still un-
available.
An interesting work to mention in this scope is
this of (Svennebring and Koenig, 2004; Koenig and
Liu, 2001), where a swarm of ant-like robots is used
for repeatedly covering an unknown area, using a real
time search method called node counting. By using
this method, the robots are shown to be able to effi-
ciently perform such a coverage mission, and analytic
bounds for the coverage time are discussed. Based on
a more general result for undirected domains shown
in (Koenig et al., 2001), the following bound is given :
The cover time of teams of ant robots (of a
given size) that use node counting on strongly
connected undirected graphs can be exponen-
tial in the square root of the number of ver-
tices.
Namely :
f(k) = O(2
√
S
0
) (1)
denoting the covering time of k robots by f(k), and
the initial area of the region to be explored by S
0
.
It should be mentioned though, that in (Sven-
nebring and Koenig, 2004) the authors clearly state
that it is their belief that the coverage time of robots
using nodes counting in grids is much smaller. This
estimation is also demonstrated experimentally. How-
ever, no analytic evidence for this was available thus
far. As grid domains are often used as an approxima-
tion for a problem in R
2
, the importance of such result
is also likely to supersede its relevance to “purely dis-
crete” problems.
3 TIME COMPLEXITY IN GRID
DOMAINS
For dealing with the generic problem of exploring an
unknown grid domain, we propose to discuss the “Dy-
namic Cooperative Cleaners” problem, a problem that
requires several simple agents to clean a connected
region of “dirty” pixels in Z
2
. A number of simple
agents move in this dirty region, unaware of its size of
shape, each having the ability to “clean” the place it is
located in. Their goal being to jointly clean the given
dirty region. The dynamic generalization of the prob-
lem involves a deterministic expansion of dirt in the
environment, simulating spreading of contamination,
or fire. By controlling the initial “contaminated” re-
gion any kind of search space in Z
2
can be simulated
(and any search space in R
2
can be approximated).
By employing the dynamic property of the contami-
nation, other known problems can be derived. For ex-
ample, collaborative hunting for evading targets (Alt-
shuler et al., 2005b; Vincent and Rubin, 2004) may
be simulated by using spreading contamination as the
union of all possible target’s locations.
It is also important to note that as the agents used
in this problem are assumed to be as limited as pos-
sible (see more details in Section 3.1, any result ob-
tained for this model will automatically be applicable
for almost any other model of agents conceivable.
COLLABORATIVE EXPLORATION IN GRID DOMAINS - Constructive Conjecture of a Polynomial Time Complexity
253
3.1 Cooperative Cleaners Problem
We shall assume that the time is discrete. Let the
undirected graph G(V, E) denote a two dimensional
integer grid Z
2
, whose vertices (or “tiles”) have a bi-
nary property called ‘contamination’. Let cont
t
(v)
state the contamination state of the tile v at time t,
taking either the value “on” or “off”. Let F
t
be the
contaminated sub-graph of G at time t, i.e. : F
t
=
{v ∈ G | cont
t
(v) = on}. We assume that F
0
is a sin-
gle connected component. Our algorithm will pre-
serve this property along its evolution.
Let a group of k agents that can move on the grid
G (moving from a tile to its neighbor in one time step)
be placed at time t
0
on F
0
, at point p
0
∈F
t
. Each agent
is equipped with a sensor capable of telling the con-
tamination status of all tiles in the digital sphere of
diameter 7, which surrounds the agent. An agent is
also aware of other agents which are located in these
tiles, and all the agents agree on a common direction.
Each tile may contain any number of agents simulta-
neously. Each agent is equipped with a memory of
size O(logk) bits. When an agent moves to a tile v,
it has the possibility of cleaning this tile (i.e. causing
cont(v) to become off. The agents do not have any
prior knowledge of the shape or size of the sub-graph
F
0
except that it is a single and simply connected com-
ponent.
The contaminated region F
t
is assumed to be
coated at its boundary by a rubber-like elastic bar-
rier, dynamically reshaping itself to fit the evolution
of the contaminated region over time. This barrier
is intended to guarantee the preservation of the sim-
ple connectivity of F
t
, crucial for the operation of the
agents, due to their limited memory. When an agent
cleans a contaminated tile, the barrier retreats, in or-
der to fit the void previously occupied by the cleaned
tile. Every d time steps the contamination spreads.
That is, if t = nd for some positive integer n, then :
∀v ∈F
t
∀u ∈ 4−Neighbors(v) , cont
t+1
(u) = on
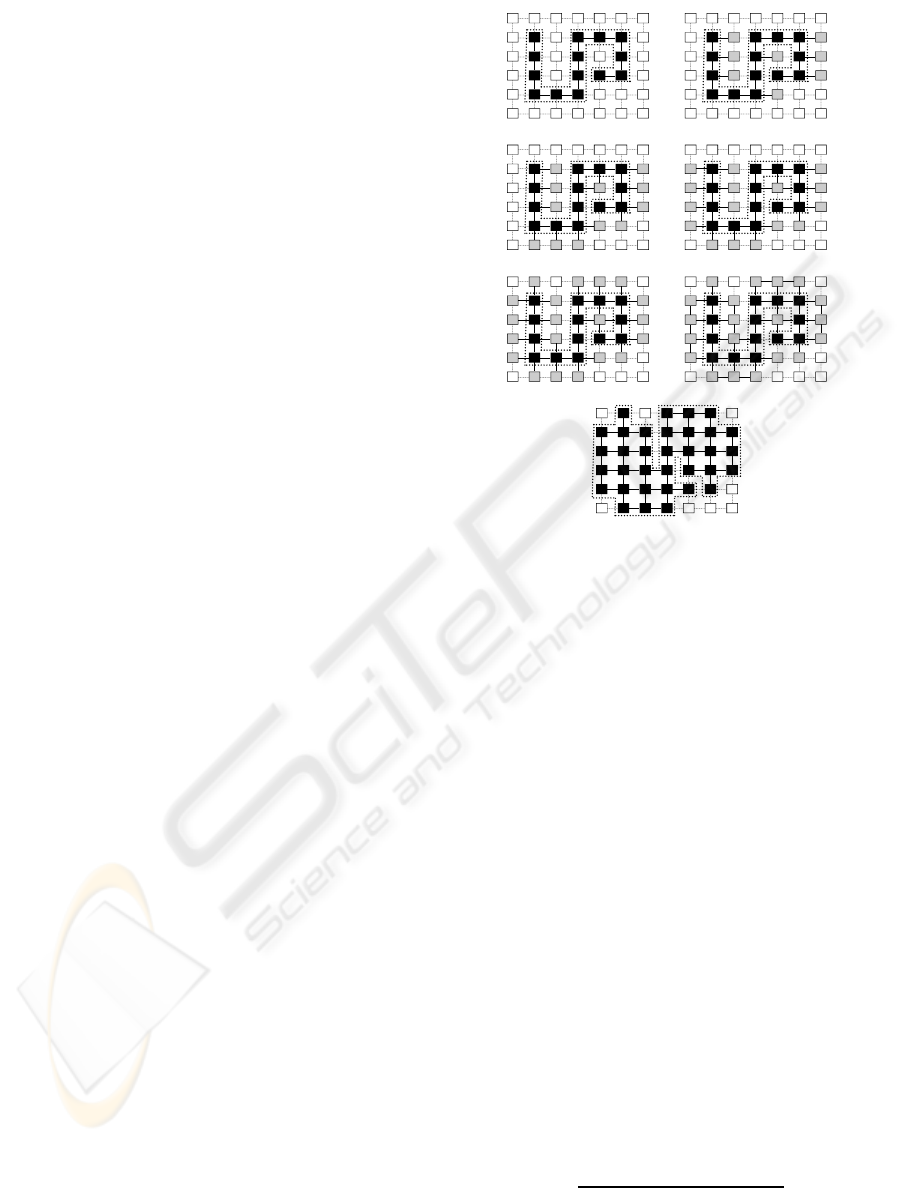
While the contamination spreads, the elastic barrier
stretches while preserving the simple-connectivity of
the region, as demonstrated in Figure 1. For the
agents who travel along the tiles of F, the barrier sig-
nals the boundary of the contaminated region.
The agents’ goal is to clean G by elimi-
nating the contamination entirely, meaning that :
(∃t
success
s.t F
t
success
=
/
0). In addition, it is desired that
time t
success
will be minimal.
It is important to note that no central control is
allowed, and that the system is fully decentralized
(i.e. all agents are identical and no explicit communi-
cation between the agents is allowed). An important
Figure 1: A demonstration of the barrier expansion process
as a result of a contamination spread.
advantage of this approach, in addition to the simplic-
ity of the agents, is fault-tolerance — even if almost
all the agents cease to work before completion, the re-
maining ones will eventually complete the mission, if
possible.
3.2 Existing Results
The cooperative cleaners problem was previously
studied in (Wagner et al., 2008) (static version) and
(Altshuler et al., 2005a; Altshuler et al., 2009) and
others (dynamic version). A cleaning algorithm was
proposed (used by a decentralized group of simple
mobile agents, for exploring and cleaning an un-
known “contaminated” sub-grid F, expanding every
d time steps) and its performance analyzed. Follow-
ing are two existing results containing upper bounds
on the cleaning algorithm’s completion time.
For some values of d and k, the cleaning might be
completed in t
static
time steps, even before the con-
tamination is able to spread even once:
Theorem 1. If t
static
< d, then the region is known to
be cleaned in less than d time steps (namely, before
any contamination spread), where :
t
static
,
8(|∂F
0
|−1) ·(W(F
0
) + k)
k
+ 2k
where W(F) is the region’s depth (the shortest
path from some internal point in F to its surface,
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
254
for the internal point whose said shortest path is the
longest) and ∂F denotes the boundary of F, defined
as :
∂F = {v |v ∈F ∧ 8−Neighbors(v) ∩ (G \ F) 6=
/
0}
For a contaminated region F
0
, for which the
contamination is predicted to spread before being
cleaned, then the following result is available :
Theorem 2. Let µ
success
, min{x ∈{µ
1
, µ
2
}|x > 0}
where µ
1
and µ
2
are defined as :
(A
4
−A
1
A
3
) ±
p
(A
1
A
3
−A
4
)
2
−4A
3
(A
2
−A
1
−A
1
A
4
)
2A
3
where :
A
1
=
c
0
+ 2−γ
2
4
, A
2
=
c
0
+ 2+ γ
2
4
, A
3
=
8·γ
2
d ·k
,
A
4
= γ
1
−
γ
2
·γ
d
, γ
1
= ψ(1+ A
2
) −ψ(1+ A
1
)
γ
2
=
q
(c
0
+ 2)
2
−8S
0
+ 8)
γ =
8(k+W(F
0
))
k
−
d −2k
|∂F
0
|−1
If such µ
SUCCESS
exists then t
success
= (µ
success
−1)·d.
Where c
0
is the circumference of the initial region
F
0
, and where ψ() is the Digamma function (studied
in (Abramowitz and Stegun, 1964)) — the logarith-
mic derivative of the Gamma function, defined as :
ψ(x) =
d
dx
lnΓ(x) =
Γ
′
(x)
Γ(x)
or as :
ψ(x) =
Z
∞
0
e
−t
t
−
e
−xt
1−e
−t
dt
3.3 Grid Exploration Complexity
Using Theorem1, as |∂F
0
| = O(S
0
) and as W(F
0
) =
O(
√
S
0
) we see that :
t
static
(k) = O
1
k
S
1.5
0
+ S
0
+ k
As for practical reasons we assume that k < S
0
we
can see that :
t
static
(k) = O
1
k
S
1.5
0
+ S
0
and when the number of robots is independent in the
size of the region, we can write :
Corollary 1. If
8(|∂F
0
|−1) ·(W(F
0
) + k)
k
+ 2k < d
Then
t
static
(k) = O
S
1.5
0
The analysis becomes slightly more complicated
when
8(|∂F
0
|−1)·(W(F
0
)+k)
k
+ 2k ≥ d, namely — when
the contamination spreads before the robots had com-
pleted its cleaning. In this case, the cleaning time
of the robots might be significantly longer, as clean
tiles might become contaminated once again, while
the robots are busy cleaning the evolving contami-
nated region. In order to analyze the complexity of
the robots’ cleaning time we shall use Theorem 2 :
Therefore :
t
SUCCESS
=
d ·O
A
1
+
A
4
A
3
+
s
A
2
1
+
A
1
A
4
+ A
1
+ A
2
A
3
+
A
2
4
A
2
3
!
=
d ·O
A
1
+
A
4
A
3
+ A
1
+
√
A
3
√
A
1
A
4
+ A
1
+ A
2
A
3
+
A
4
A
3
=
d ·O
A
1
+
A
4
A
3
+
√
A
1
A
4
+
√
A
1
+
√
A
2
√
A
3
=
d ·O
c
0
+ γ
2
+ dk
γ
1
γ
2
+ kγ+
√
k
√
c
0
+ γ
2
√
γ
+
+d ·O
√
k
√
c
0
+ γ
2
p
dγ
1
+ 1
√
γ
2
!
Taking into consideration that (γ
2
∈R) ⇒(γ
2
≥1)
and that γ
2
= O(c
0
) we can write the previous expres-
sion as :
d ·O
c
0
+ dkγ
1
+ kγ+
√
k
√
c
0
p
dγ
1
+ 1+
√
γ
(2)
As |∂F
0
|= O(S
0
) and as W(F
0
) = O(
√
S
0
) we can
see that :
γ = O
√
S
0
k
+
d + k
√
S
0
and when we require that the number of robots is in-
dependent of the size of the region, we can assume
that k <
√
S
0
and write :
γ = O
p
S
0
+
d
√
S
0
And as the delay between two spreads can assumed
to be smaller than the size of the region, we can
see that γ = O
√
S
0
. In addition, remembering that
O(
√
S
0
) ≤ c
0
≤ O(S
0
) we can rewrite the expression
of equation 2 as follows :
t
SUCCESS
= d ·O
c
0
+ dkγ
1
+ k
p
S
0
+
p
kdc
0
γ
1
+
√
kS
0
(3)
Let us observe γ
1
:
γ
1
, ψ
1+
c
0
+ 2+ γ
2
4
−ψ
1+
c
0
+ 2−γ
2
4
COLLABORATIVE EXPLORATION IN GRID DOMAINS - Constructive Conjecture of a Polynomial Time Complexity
255

As (γ
2
∈ R) ⇒ (γ
2
> 0) we are guaranteed that
1+
c
0
+2+γ
2
4
> 1. Note that ψ(1) = −
ˆ
γ where
ˆ
γ is
the Euler-Mascheroni constant, defined as :
ˆ
γ = lim
n→∞
"
n
∑
k=1
1
k
!
−log(n)
#
=
Z
∞
1
1
⌊x⌋
−
1
x
dx
which equals approximately 0.57721. In addition,
ψ(x) is monotonically increasing for every x > 0. As
we also know that ψ(x) is upper bounded by O(ln(x))
for large values of x, we see that :
−0.58 < ψ
1+
c
0
+ 2+ γ
2
4
< O(ln(c
0
)) (4)
We now need to present a bound for
ψ
1+
c
0
+2−γ
2
4
. For this, it is sufficient to show that
1+
c
0
+2−γ
2
4
> 1. It is easy to see that this holds
when c
0
≥ γ
2
:
c
0
? ≥ γ
2
,
q
(c
0
+ 2)
2
−8·(S
0
−1) =⇒
c
2
0
? ≥ (c
0
+2)
2
−8·(S
0
−1) = c
2
0
+4c
0
−4−8S
0
=⇒
2S
0
+ 1 ? ≥ c
0
which of course holds, as c
0
≤ 2S
0
−2. Therefore
1+
c
0
+2−γ
2
4
> 1 which implies :
−0.58 < ψ
1+
c
0
+ 2−γ
2
4
< O(ln(c
0
)) (5)
Combining equations 4 and 5 we see that :
−O(ln(c
0
)) < γ
1
< O(ln(c
0
)) (6)
Using equation 6 in order to rewrite equation 3
produces :
Conjecture 1.
t
SUCCESS
=
d·O
c
0
+ dkln(c
0
) + k
p
S
0
+
p
dkc
0
ln(c
0
) +
√
kS
0
Comparing this to the bound of equation 1, we
see that when successful completion of the mission
by the cleaning protocol proposed is guaranteed, its
time complexity is polynomial, as c
0
, d,k < O(S
0
).
4 CONCLUSIONS
In this work the decentralizedexploration problem us-
ing a group of simple, ant-like agents was discussed.
A conjecture suggesting that the time complexity of
this problem in grid domain is polynomial was pre-
sented. This was done by introducing a constraint
which when followed guarantees a polynomial time
completion. The importance of this result, as well as
several related work were also discussed.
REFERENCES
Abramowitz, M. and Stegun, I. (1964). Handbook of Math-
ematical Functions, page 55. Applied Mathematics
Series. National Bureau of Standards.
Acar, E., Zhang, Y., Choset, H., Schervish, M., Costa, A.,
Melamud, R., Lean, D., and Gravelin, A. (2001). Path
planning for robotic demining and development of a
test platform. In International Conference on Field
and Service Robotics, pages 161–168.
Alami, R., Fleury, S., Herrb, M., Ingrand, F., and Robert, F.
(1998). Multi-robot cooperation in the martha project.
IEEE Robotics and Automation Magazine, 5(1):36–
47.
Altshuler, Y., Bruckstein, A., and Wagner, I. (2005a).
Swarm robotics for a dynamic cleaning problem. In
IEEE Swarm Intelligence Symposium, pages 209–216.
Altshuler, Y., Wagner, I., and Bruckstein, A. (2009). Swarm
ant robotics for a dynamic cleaning problem — up-
per bounds. The 4th International conference on Au-
tonomous Robots and Agents (ICARA-2009), pages
227–232.
Altshuler, Y., Yanovski, V., Wagner, I., and Bruckstein, A.
(2005b). The cooperative hunters - efficient coopera-
tive search for smart targets using uav swarms. In Sec-
ond International Conference on Informatics in Con-
trol, Automation and Robotics (ICINCO), the First In-
ternational Workshop on Multi-Agent Robotic Systems
(MARS), pages 165–170.
Arkin, R. (1990). Integrating behavioral, perceptual, and
world knowledge in reactive navigation. Robotics and
Autonomous Systems, 6:105–122.
Balch, T. and Arkin, R. (1998). Behavior-based formation
control for multi-robot teams. IEEE Transactions on
Robotics and Automation, 14(6):926–939.
Batalin, M. and Sukhatme, G. (2002). Spreading out: A
local approach to multi-robot coverage. In 6th In-
ternational Symposium on Distributed Autonomous
Robotics Systems.
Beni, G. and Wang, J. (1991). Theoretical problems for the
realization of distributed robotic systems. In IEEE In-
ternal Conference on Robotics and Automation, pages
1914–1920.
Butler, Z., Rizzi, A., and Hollis, R. (2001). Distributed
coverage of rectilinear environments. In Proceedings
of the Workshop on the Algorithmic Foundations of
Robotics.
Candea, C., Hu, H., Iocchi, L., Nardi, D., and Piaggio, M.
(2001). Coordinating in multi-agent robocup teams.
Robotics and Autonomous Systems, 36(2–3):67–86.
Chevallier, D. and Payandeh, S. (2000). On kinematic ge-
ometry of multi-agent manipulating system based on
the contact force information. In The Sixth Interna-
tional Conference on Intelligent Autonomous Systems
(IAS-6), pages 188–195.
E.Bonabeau, M.Dorigo, and G.Theraulaz (1999). Swarm
Intelligence: From Natural to Artificial Systems. Ox-
ford University Press, US.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
256

Efraim, A. and D.Peleg (2007). Distributed algorithms for
partitioning a swarm of autonomous mobile robots.
Structural Information and Communication Complex-
ity, Lecture Notes in Computer Science, 4474:180–
194.
Gerkey, B. and Mataric, M. (2002). Sold! market meth-
ods for multi-robot control. IEEE Transactions on
Robotics and Automation, Special Issue on Multi-
robot Systems.
Gordon, N., Wagner, I., and Bruckstein, A. (2003). Discrete
bee dance algorithms for pattern formation on a grid.
In IEEE International Conference on Intelligent Agent
Technology (IAT03), pages 545–549.
Haynes, T. and Sen, S. (1986). Evolving Behavioral Strate-
gies in Predators and Prey, volume 1042 of Lecture
Notes in Computer Science, chapter Adaptation and
Learning in Multi-Agent Systems, pages 113–126.
Springer, Berlin.
Hettiarachchi, S. and Spears, W. (2005). Moving swarm
formations through obstacle fields. In International
Conference on Artificial Intelligence.
Kerr, W. and Spears, D. (2005). Robotic simulation of gases
for a surveillance task. In Intelligent Robots and Sys-
tems (IROS 2005), pages 2905–2910.
Koenig, S. and Liu, Y. (2001). Terrain coverage with ant
robots: A simulation study. In AGENTS’01.
Koenig, S., Szymanski, B., and Liu, Y. (2001). Efficient
and inefficient ant coverage methods. Annals of Math-
ematics and Artificial Intelligence, 31:41–76.
Kong, C., Peng, N., and Rekleitis, I. (2006). Distributed
coverage with multi-robot system. In IEEE Interna-
tional Conference on Robotics and Automation.
Koopman, B. The theory of search ii, target detection. Op-
erations Research.
MacKenzie, D., Arkin, R., and Cameron, J. (1997). Multia-
gent mission specification and execution. Autonomous
Robots, 4(1):29–52.
Mataric, M. (1992). Designing emergent behaviors:
From local interactions to collective intelligence. In
J.Meyer, H.Roitblat, and S.Wilson, editors, Proceed-
ings of the Second International Conference on Sim-
ulation of Adaptive Behavior, pages 432–441. MIT
Press.
Mataric, M. (1994). Interaction and Intelligent Behavior.
PhD thesis, Massachusetts Institute of Technology.
Olfati-Saber, R. (2006). Flocking for multi-agent dynamic
systems: Algorithms and theory. IEEE Transactions
on Automatic Control, 51(3):401–420.
Passino, K., Polycarpou, M., Jacques, D., Pachter, M., Liu,
Y., Yang, Y., Flint, M., and Baum, M. (2002). Coop-
erative Control for Autonomous Air Vehicles, chapter
Cooperative Control and Optimization. Kluwer Aca-
demic, Boston.
Polycarpou, M., Yang, Y., and Passino, K. (2001). A co-
operative search framework for distributed agents. In
IEEE International Symposium on Intelligent Control,
pages 1–6.
Rabideau, G., Estlin, T., Chien, T., and Barrett, A. (1999). A
comparison of coordinated planning methods for co-
operating rovers. In Proceedings of the American In-
stitute of Aeronautics and Astronautics (AIAA) Space
Technology Conference.
Rekleitis, I., Dudek, G., and Milios, E. (2003). Experiments
in free-space triangulation using cooperative localiza-
tion. In IEEE/RSJ/GI International Conference on In-
telligent Robots and Systems (IROS).
Rekleitis, I., New, A., and Choset, H. (2005). Distributed
coverage of unknown/unstructured environments by
mobile sensor networks. In The Third MRS workshop.
Rekleitisy, I., Lee-Shuey, V., Newz, A. P., and Choset, H.
(2004). Limited communication, multi-robot team
based coverage. In IEEE International Conference on
Robotics and Automation.
Shucker, B. and Bennett, J. (2005). Target tracking with
distributed robotic macrosensors. In Military Com-
munications Conference (MILCOM 2005), volume 4,
pages 2617–2623.
Steels, L. (1990). Cooperation between distributed agents
through self-organization. In Y.DeMazeau and
J.P.Muller, editors, Decentralized A.I - Proc. first Eu-
ropean Workshop on Modeling Autonomous Agents in
Multi-Agents world, pages 175–196. Elsevier.
Stone, L. (1975). Theory of Optimal Search. Academic
Press, New York.
Svennebring, J. and Koenig, S. (2004). Building terrain-
covering ant robots: A feasibility study. Autonomous
Robots, 16(3):313–332.
Thayer, S., Dias, M., Digney, B., Stentz, A., Nabbe, B., and
Hebert, M. (2000). Distributed robotic mapping of ex-
treme environments. In Proceedings of SPIE, volume
4195 of Mobile Robots XV and Telemanipulator and
Telepresence Technologies VII.
Vincent, P. and Rubin, I. (2004). A framework and analy-
sis for cooperative search using uav swarms. In ACM
Simposium on applied computing.
Wagner, I., Altshuler, Y., Yanovski, V., and Bruckstein,
A. (2008). Cooperative cleaners: A study in ant
robotics. The International Journal of Robotics Re-
search (IJRR), 27(1):127–151.
Wagner, I. and Bruckstein, A. (2001). From ants to a(ge)nts:
A special issue on ant—robotics. Annals of Mathe-
matics and Artificial Intelligence, Special Issue on Ant
Robotics, 31(1–4):1–6.
Yamashita, A., Fukuchi, M., Ota, J., Arai, T., and Asama, H.
(2000). Motion planning for cooperative transporta-
tion of a large object by multiple mobile robots in a
3d environment. In In Proceedings of IEEE Interna-
tional Conference on Robotics and Automation, pages
3144–3151.
COLLABORATIVE EXPLORATION IN GRID DOMAINS - Constructive Conjecture of a Polynomial Time Complexity
257
