
TUNING OF INDUSTRIAL CONTROLLERS
OVER PUBLIC IP NETWORKS
Renato F. Fernandes Jr, Dennis Brandão
University of São Paulo, Av.Trabalhador Sãocarlense 400, São Carlos, SP, Brazil
Nunzio M. Torrisi
Universidade Federal do ABC, Rua Santa Adélia 166, Santo André, SP, Brazil
Keywords: PID control, Identification, Industrial systems, Remote control, Industraial networks.
Abstract: Tuning of industrial systems is executed in the initial phase of the system and mainly during the
maintenance phase, providing characteristics of the performance of the industrial process during production
life cycle. Remote tuning supports several practical applications, such as specialized companies outsourcing
services or companies distributed in different areas centralizing optimization. This paper proposes a
software tool for remote tuning of open or closed PID control loops in an industrial environment that fulfils
the requirements described above, in a single platform. The software tool could be used in control loops
tuning in industrial systems, as well as in an academic environment simulating control applications and
industrial networks.
1 INTRODUCTION
Increasing competitiveness in the industrial sector
has required continuous improvement in product
quality processes, optimizing the production and
reducing operational costs. Nowadays, researches
like (Avov, 2004) show the potential of the Internet
in the industrial environment. However, considering
the use of the Internet for control and supervision of
industrial processes, it should be noticed that the
nature of production and automation systems
demands some requirements to be secured, such as
managing multiple accesses, ensuring the
communication and the control system, setting
maximum periods for process data updates and
quality of service maintenance (Abdelzaher, 2002).
Remote access architectures may be
implemented at different levels in the control
hierarchy: at process level, at supervisory level and
at system optimization level (Yang, 2003). In terms
of process, the proposal is to include remote control
within the process control loop, according to
(Overstreet, 1999) (Yang, 2007). For this purpose,
the conventional discrete control structure should be
altered to conform to the Internet’s variable (Luo,
2000), (Yang, 2007).
The concern at the supervisory level is safety and
quality of service, discussed in (Kunes, 2001). Yang
et al. (Yang, 2003) proposes a remote control at
supervision level for services that are independent of
the Internet delay, which would be restricted to
acyclic services such as tuning parameters for PID
block and set points.
In the context of SCADA (Supervisory Control
and Data Acquisition) systems, the OPC (OLE for
process control) technology (OPC Foundation,
2006) combined with Web technologies, as
WebServices, is used to draw complex architecture
for manufacturing in order to create communication
system directly between shop-floor and
decentralized supervision systems (Zheng and
Nakagawa, 2001).
Commercial companies offer today solutions for
remote monitoring and tuning of industrial systems.
However, these solutions have some limitations,
because they may be based on non-standard
platforms for the industrial environment and may
use common WebServices (Calvo, 2006) (Batur,
2000) (Qin, 2007).
Torrisi (Torrisi, 2007) proposes a standard OPC
communication mechanism based on the Internet, a
platform-independent alternative to WebServices.
That standard, called CyberOPC, uses "open"
278
F. Fernandes Jr R., Brandão D. and M. Torrisi N. (2009).
TUNING OF INDUSTRIAL CONTROLLERS OVER PUBLIC IP NETWORKS.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 278-284
DOI: 10.5220/0002218002780284
Copyright
c
SciTePress

security technologies for light software components,
therefore providing better performance and
increasing guarantees for data security, when
compared to other technologies based on
WebServices.
This paper proposes an architecture to execute
remote tuning of industrial control systems using the
Internet, fulfilling acceptable security and
performance requirements. In order to validate the
architecture, a software application using CyberOPC
and called Cybertune will be presented. The
validation consists of a model-based identification
and tuning using first-order-plus-dead-time systems.
This paper is organized as follows: Section 2
shows the requirements for remote tuning and
problems related to supervision and remote control
of industrial systems. Section 3 presents the generic
architecture of the remote tuning system. Section 4
describes tests and results from remote tuning, and
finally section 5 presents the conclusions and
indicates future researches.
2 REMOTE TUNING
REQUIREMENTS
In control loop tuning, the system identification
phase demands over half of the effort (Yu, 2006),
(Hjalmarsson, 2005). In order to obtain the model in
time domain, the most common way to identify low
order systems is identifying the transient response to
a process alteration. The transient response is found
when stimulating the system using a step-format
signal, an impulse or a pseudo-random binary
sequence (PRBS) as a system input. Identification is
executed by estimating parameters through data
collection and expression using ARX (Auto-
Regressive Exogenous) or ARMAX (Auto-
Regressive Moving Exogenous) model (Aguirre,
2004) (Ljung, 1999).
Controllers are tuned in three phases, according
to model-based techniques: identifying the plant
model, tuning based on the identified model, and
validating tuning using simulations based on the
identified model with the new controller.
An important step in the model-based
identification consists of defining the sampling rate,
which must be constant and generally in the order of
ten times smaller than the time constant of the
system (Aguirre, 2004).
In general, the OPC technology has an update
rate defined in seconds for processes with fieldbus
technology. This rate reduces our scope to slower
systems with time constants and dead time 5 to 10
times of the time of the OPC acquisition, although
many industrial systems may fit this scenario, such
as temperature control and chemical processes.
2.1 Communication Problems related
to Remote Control and Monitoring
The Internet and WebServices available nowadays
create some obstacles when used in industrial
control systems (Abdelzaher, 2002), (Yang, 2003),
(Torrisi, 2007):
• Communication delay of different types,
throughout the data source up to the destination
nodes.
• Non-determinism of the network due to various
routes available on the Internet, where the
decision of the best route to be used should be
taken for each data packet received.
• Network data should be secured, meeting the
following security properties: confidentiality,
authentication and integrity of messages.
• Considering the remote control in public
networks, OPC solutions based on
WebServices are even slower than those based
on DCOM(Distributed Component Object
Model) (Advosol Inc., 2004).
3 GENERIC ARCHITECTURE
FOR REMOTE TUNING
The architecture proposed for the remote tuner is
based on the interconnection of modules in three
different contexts: the industrial plant, the server and
the client. It is based on the client-server cooperation
model, which consists of different interconnected
modules providing process and configuration
variables from the industrial plant to the remote
client. The proposed architecture is implemented in
a generic “open” design and can be used with any
commercial software component. The figure below
shows the components of the architecture.
Figure 1: Remote Tuner Architecture.
TUNING OF INDUSTRIAL CONTROLLERS OVER PUBLIC IP NETWORKS
279
Inside the "server" module, indicated in the
architecture proposed in Figure 1, the
communication driver is the communication
interface between the server and field devices for
data acquisition. Being a widely used standard in the
industrial environment, OPC was selected for this
project to communicate to the fieldbus network.
Moreover, in the server module, the HTTP
(Hypertext Transfer Protocol) Server is responsible
for processing remote requests from several clients
connected to server module. The communication
between the remote HTTP server and the clients can
use proprietary protocols, WebService and other
protocols over HTTP.
The "client" module represents the remote
monitoring and tuning unit. The client must be a
standard OPC client allowing the communication to
a variety of field device networks. The Cybertune
prototype for this study used an OPC client
architecture for local communication and a
CyberOPC client for remote communication.
In order to avoid the non-determinism of the
Internet, the strategy used in this work was attaching
a timestamp to each sample. This way, the time
measured will always be used, thereby obtaining the
actual rate for each performed identification. For the
remote communication, using CyberOPC ensures
that there will be a constant data acquisition on the
control side, with packet sequencing, determining
the information obtained by the remote client.
CyberOPC is based on open standard
technologies. It minimizes software and interfaces
layers for a better and faster network use because it
is a technology with a simple philosophy dedicated
to industrial applications with "soft real time"
requirements in IP networks with assured
bandwidth. One of the features from this protocol is
the use of an internal cache memory, which provides
better performance in processing messages.
Server and client roles in the proposed
architecture using CyberOPC communication
protocol are detailed below.
3.1 The CyberOPC Communication
System
The most commonly used OPC specification is the
OPC Data Access (DA) 2.x and 3.x. It does not
intend to compensate communication latencies that
can occur in wide area networks neither provide
communication for clients or servers intermittently
connected to the network. Another restriction comes
from the fact that OPC DA data cannot be
transferred over the Internet, because all TCP/IP
ports except Port 80, which allows only textual data,
are usually blocked at corporate firewalls. However,
OPC is based on a Microsoft standard for
component communication – DCOM (Distributed
Component Object Model) – that is not textual.
The OPC XML-DA and the incoming OPC-UA
specification (OPC Foundation, 2008) define a
WebServices based approach for reading from and
writing data to plant floor automation systems. In
this approach, all OPC data are formatted in XML
blocks and transmitted using simple object access
protocol (HTTP-SOAP). The choice to adopt
WebServices solves the problems related to binary
data blocked at firewalls and promotes software
integration manufacturing with WebServices
technologies, despite the low quality of service level
to address typical timing requirements of real time
process control networks.
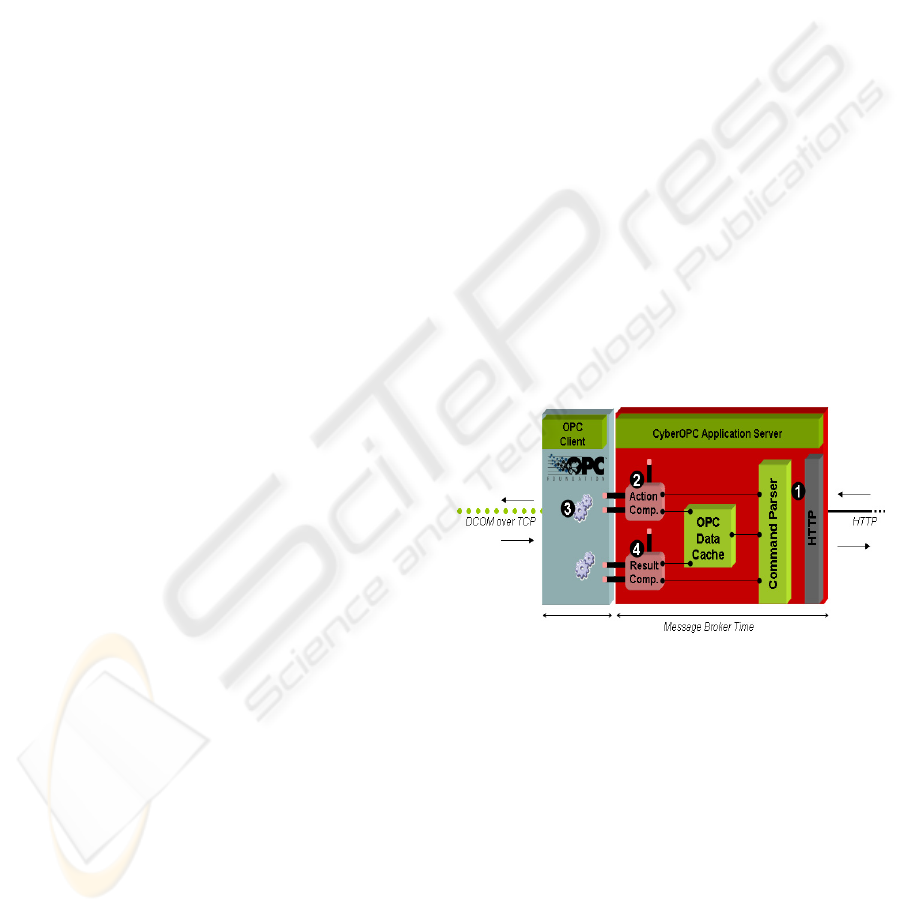
Step 1 in Figure 2 represents the processing of
CyberOPC commands without SOAP preprocessor.
Introducing the OPC cache strongly reduces calls to
the OPC Client. Tests have reported the reduction of
70% of the Message Broker Time when compared to
the time consumed by a Gateway WebServices
based. Steps 2, 3 and 4 represent the interaction
between the OPC library and the CyberOPC
Application Server
Figure 2: Message Broker Time for CyberOPC Gateway.
OPC Packet Data and requests are encoded as text using
JSON or XML syntax
For HTTP communications, there are two
categories of security mechanisms: transport level
security and message level security. The transport
level security mechanism uses Server Secure Socket
(SSL), using digital X.509 certificates (ITU
Recommendation, 1997). The CyberOPC
communication system replaces the OPC Polling
mechanism over SSL.
3.2 The Cybertune Structure
The Cybertune prototype consists of four main
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
280
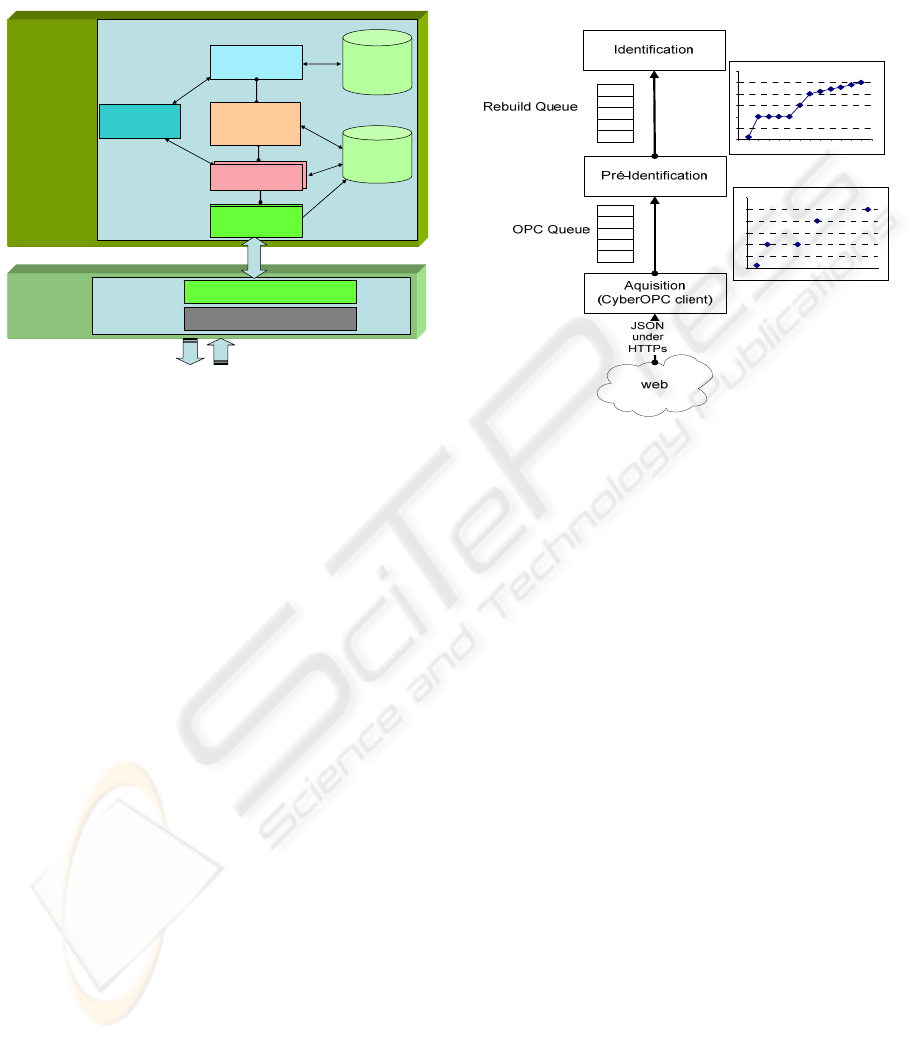
operational modules: data acquisition, system
identification, model transformation and tuning
modules. A schematic of the structure is shown in
figure 3.
Cybertune
Data Aquisition
(OPC Client)
Identification
Tuning
Knowledge
base
Process
Data
Base
CyberOPC
OPC Server
HTTPS
JSON
Sobre HTTPS
Validation
Model
Transformation
Data Aquisition
(OPC Client)
Identification
Figure 3: Cybertune structure.
The data acquisition module consists of an OPC
or CyberOPC client in accordance with the
specifications of the OPC standard (OPC
Foundation, 2008) or the specifications in (Torrisi,
2007). Thus, the component interface has the same
data access philosophy, consisting of OPC library
records, adding groups and items to the database,
and acyclic communication per event, where the
client is notified when a new data event is issued by
the server.
For the identification module, responsible for
determining the system transfer function, the ARX
model was used, which provides good results for
first and second order linear systems, the most
common systems in industrial environments (Yu,
2006). As this project aims to validate the
architecture for online identification and tuning, the
Cybertune needs to receive process data and
automatically perform the identification.
Assuming that there are communication delays
and transmission failures while executing online
remote identification, this work proposes the
following methodology. First, every sample
collected by CyberOPC has a timestamp with the
time when the data was acquired by the gateway. In
addition, since the ARX model requires continuous
sampling and CyberOPC sends data (per event on
data change) in an optimized way, it is necessary to
rebuild the process signal at a constant sampling
rate.
To solve this case, a "pre-identification” module
was included, being responsible for receiving
queued data from the acquisition module and
sending samples to the identification data queue at a
constant sampling rate. Interpolation between two
sample points used the first order equation. An
example of this architecture is shown in figure 4.
0
5
10
15
20
25
30
0 1 2 3 4 5 6 7 8 9 10 11 12 13
0
5
10
15
20
25
30
0 1 2 3 4 5 6 7 8 9 10 11 12 13
Figure 4: Pre-Identification module.
After the identification and validation of the
ARX model is necessary to transform the ARX
model in open loop model to be subsequently
applied to the model based methods for tuning. The
algorithm used for model transformation module for
open and close loop was described in (Fernandes
and Brandão, 2008).
Finally, the tuning module applies the tuning
methods to the model obtained before. The
Cybertune uses Ziegler Nichols (ZN) and internal
model control (IMC) common model-based tuning
methods (Ang, 2005).
4 TESTS AND RESULTS
Identification tests were performed to validate the
proposed architecture simulating first-order-plus-
dead-time systems using local and remote
identification in a corporate network.
Tests were conducted using the FieldBus Plant
Simulator (FBSIMU), which simulates industrial
plant and fieldbus control logic. .The studies of
(Pinotti and Brandão, 2005) showed that FBSIMU
has good approach to simulate real system.
Figure 5 presents the tests scenarios of this work.
Local tests used communication with Cybertune and
FBSIMU in the same station. Remote tests used a
2Mbits internet connection.
TUNING OF INDUSTRIAL CONTROLLERS OVER PUBLIC IP NETWORKS
281
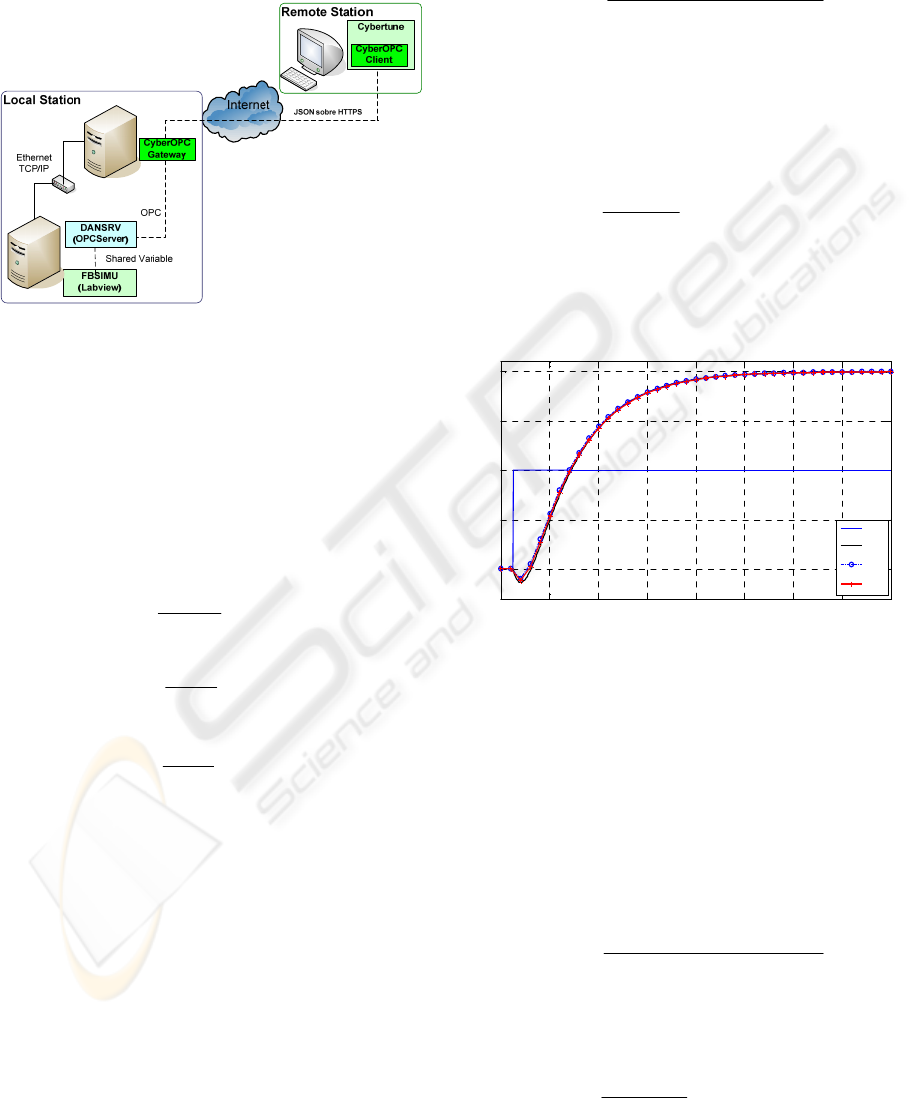
Server station consists of a CyberOPC gateway
module communicating via OPC to FBSIMU.
Remote client station consists of Cybertune
communicating via CyberOPC protocol with the
FBSIMU.
Figure 5: System architecture for local and remote
communication between Cybertune and FBSIMU.
Simulation tests were performed using three
systems with different characteristics: two tests used
slower systems (such as an oven or industrial
chemical process), and the other test used a fast
system (such as a flow control loop). The transfer
function of the systems were showed below, where
in this paper is called system 1 the equation (1),
system 2 the equation (2) and so on.
s
e
s
p
G
50
1100
2
−
+
=
(1)
s
e
s
p
G
35
115
25
−
+
=
(2)
s
e
s
p
G
20
1150
3
−
+
=
(3)
To validate the tests, the ITAE performance
index and the correlation index (FIT) were used in
relation to the actual signal and the identified signal.
For a correlation index higher the identification is
considered as good (Ljung, 1999).
3.1 Tests Results
For the first test, consider the transfer function (1) of
the system 1.
Initially regarding the local identification test,
identification is estimated according to
approximation using a fourth order ARX model and
sampling rate (To = 1.0 sec). The model shown in
(4) was obtained with FIT=96.75%:
4448.00129.0
z4280.0z0030.1z
0023.00105.0
0060.00170.0
)(
234
23
+−
−−
++
+
−
=
z
z
zz
zFTMA
(4)
Then, the ARX model is transformed into the
open loop model according to the equations
proposed in (Fernandes e Brandão, 2008), which
results in the following model approximation:
)30.46(
13.102
00.2
s
e
s
p
G
−
+
=
(5)
The graph shown in Figure 6 compares the real
system and the system identified locally. The final
solution has FIT equals to 98.21%.
0 100 200 300 400 500 600 700 80
0
0
0.5
1
1.5
2
Time [s]
Output
U
Y
real
Y
arx
Y
est
Figure 6: Cybertune identification of system 1 in a local
station. It shows the original signal (Yreal), the fourth
order ARX signal (Yarx) and the identified open loop
system (Yest).
The same system defined in (1) was used in the
remote identification test. As described in the
previous test, considering an approximation ARX
with a fourth order and sampling rate (To = 2.0 sec),
the model is estimated according to the following
equation (FIT=93.78%):
1931.007639.0
2
z1628.0
3
z4310.1
4
z
0080.00083.0
2
0120.0
3
0028.0
)(
++
+−
+
+−−
=
z
z
zz
zFTMA
(6)
After transforming the ARX model into the open
loop model, the model approximation is obtained:
)7.38(
17.118
00.2
s
e
s
p
G
−
+
=
(7)
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
282
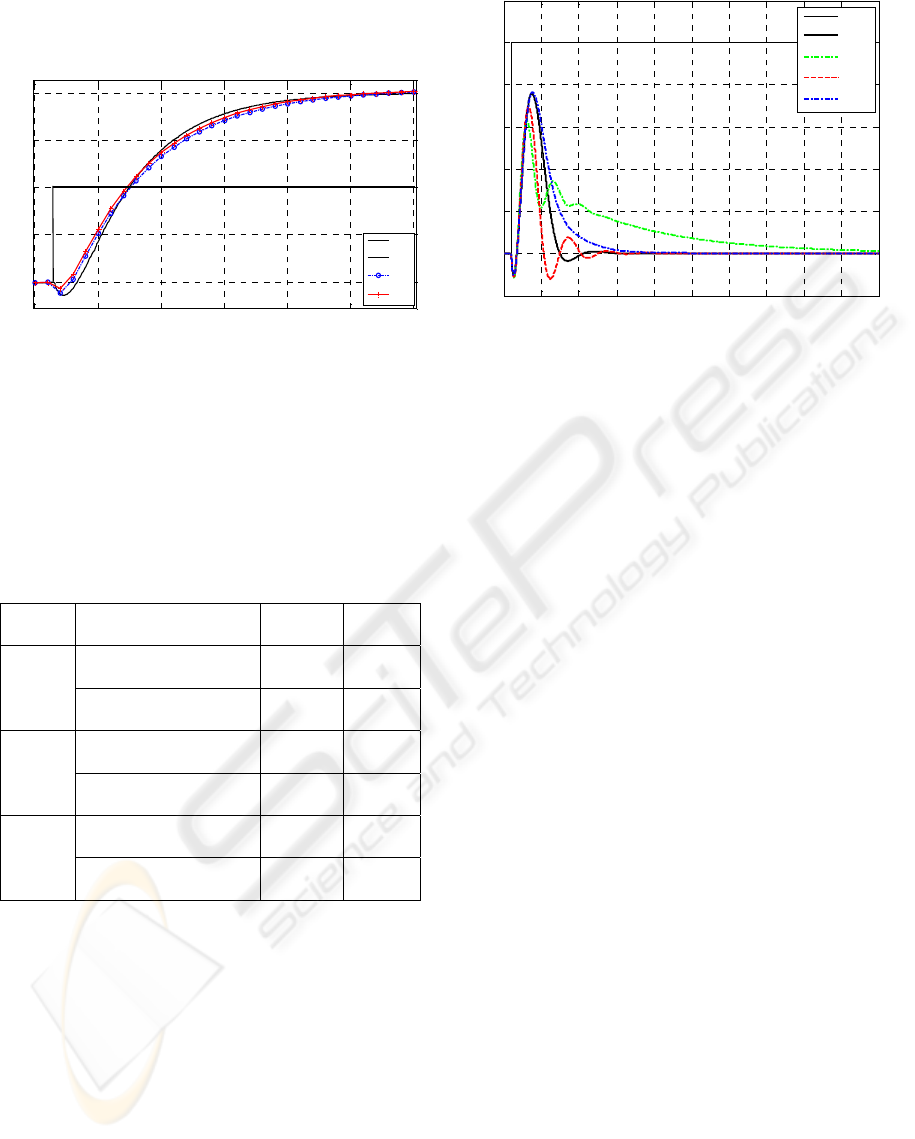
The graph shown in Figure 7 compares the real
system and the system identified remotely. The final
solution has FIT equals to 93.65%.
0 100 200 300 400 500 600
6
6.5
7
7.5
8
Time [s]
Output
U
Y
real
Y
arx
Y
est
Figure 7: Cybertune identification of a system 1 in a
remote station. It shows the original signal (Yreal), the
fourth order ARX signal (Yarx) and the identified open
loop system (Yest).
Table 1 summarizes the results from the three tested
systems. The experimental procedure for systems 2
and 3 are omitted because they are the same as
described for system 1.
Table 1: Local and Remote Tests Results.
System
Description of the test
with Cybertune
ITAE FIT[%]
1
Local identification
(T
o
= 1.0 sec)
4.57E+2 98.21
Remote identification
(T
o
= 2.0 sec)
6.34E+3 93.65
2
Local identification
(T
o
= 1 sec)
5.93E+2 98.46
Remote identification
(T
o
= 5 sec)
8.13E+3 91.60
3
Local identification
(T
o
= 1 sec)
3.54E+2 99.77
Remote identification
(T
o
= 5 sec)
1.86E+3 92.80
In the tuning phase is used the open loop model
obtained from the identification phase. The figure
below shows the tuning with common methods
ISTE, ITAE and IMC and ZN.
5 CONCLUSIONS
This paper proposed an architecture to execute
remote tuning of industrial control systems using the
Internet, fulfilling acceptable security and
performance requirements. In order to validate the
architecture, a software application using CyberOPC
and called Cybertune were presented. The validation
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
U
Y
atual
Y
ISTE
Y
ITA E
Y
IMC
Figure 8: Example of tuning the model obtained in (7) in a
remote station. It shows the original tuning with ZN
(Y
atual
) and some common methods based in model.
consisted of a model-based identification and tuning
of three selected first order plus dead time systems
once this is a typical class of industrial systems, but
the architecture can be extended to other
configurations.
The tests and results session of this paper
focused on a given first order system with dead time
for PID controllers, tests for other two systems were
conducted and the results were summarized.
The tests demonstrated that the remote model
identification is very close to the local identification
and the original system, which validates the
architecture for identification and subsequent tuning
implemented with model-based methods.
For remote identification, it is necessary to pre-
filter the signal in order to increase the efficiency of
ARX identification.
In future researches, we intend to validate the
algorithm in real plant floor systems, through
fieldbus system applications.
ACKNOWLEDGEMENTS
The authors gratefully acknowledge the Brazilian
agency FAPESP for financial support received and
the academic support and research structure of the
Engineering School of São Carlos - University of
São Paulo.
REFERENCES
Abdelzaher, T. F..; Shin, K.G.S.; Bhatti, N., 2002.
Performance Guarantees for Web Server End-Systems:
TUNING OF INDUSTRIAL CONTROLLERS OVER PUBLIC IP NETWORKS
283

A Control-Theoretical Approach, In: IEEE
Transactions on Paralllel and distributed systems, vol
13, no 1, January 2002.
Aguirre, L. A., 2004. Introdução a Identificação de
Sistemas, Técnicas Lineares e Não Lineares aplicadas a
sistemas reais. 2ª edição, 2004, Editora UFMG.
Ang, K. H.; Chong, G.; Li, Y. (2005). PID Control System
Analysis, Design, and Technology. In: IEEE
Transaction on Control Systems Technology, Vol 13,
No 4, July 2005.
Avoy, T. M.; Jounela, S.L.J.; Patton, R.; Perrier, M.;
Weber, H.; Georgakis, C., 2004. Milestone report for
area 7 industrial applications. In: Control Engineering
Practice 12 (2004) 113-119.
Advosol Inc., XMLDA.NET White Paper, 2004
Available:http://www.advosol.com/driver.aspx?Topic=
WhitePaperXMLDANET.
Batur, C.; Ma, Q.; Larson, K., Kettenbauer, N., 2000.
Remote tuning of a PID position controller via internet.
In: American Control Conference, Chicago, 2000.
Brandão, D., Cunha, M. J., Pinotti, J. M., 2004 . Fieldbus
Control System Project Support Tool based on
Experimental Analysis and Modeling of
Communication Bus. In: IEEE International
Conference on Industrial Technology, 2004,
Hammamet, 2004.
Calvo, I.; Marcos, M.; Orive, D.; Sarachaga, I., 2006. A
methodology based on distributed object-oriented
technologies for providing remote access to industrial
plants. In: Control Engineering Practice, 14 (2006),
pp. 975-990
Fernandes, R. F., Brandão, D., 2008. Método de
identificação online de sistemas industriais com
controladores PI em malha fechada, In: Conferência
Internacional de Aplicações Industriais, Poços de
Caldas. Anais do VIII INDUSCON, 2008.
Hjalmarsson, H., 2005. From experiment design to closed
loop control. Automatica, 41 (2005) pp. 393-438.
ITU Recommendation, 1997. X.509 version 3.
Information Technology - Open Systems
Interconnection - The Directory Authentication
Framework, August 1997.
Ljung, L., 1999. System Identification – Theory for the
User. Second Edition, 1999, Englewood, Prentice
Hall.
Luo, R.C.; Chen, T.M., 2000. Development of a
multibehavior-based mobile robot for remote
supervisory control through the Internet. In:
IEEE/ASME Transactions on mechatronics, vol. 5, no.
4, December 2000.
Kunes, M., Sauter, T., 2001. Fieldbus-Internet
connectivity: The SNMP approach. In: IEEE
Transactions on Industrial Electronics, 48(6), 1248–
1256.
Kurose, J. F., Ross, K. W., 2006. Redes de computadores
e a Internet. 3ª Edição, 2006, Editora Addison Wesley.
Qin, W., Wang, Q., 2007. An LPV approximation for
admission control of an internet web server:
Identification and control. In: Control Engineering
Practice, Feb 2007.
OPC Foundation, 2006. OPC Standard. In:
<www.opcfoundation.org
>. Access em: 26 jul. 2007.
Overstreet, J. W., Tzes, A., 1999. Internet-based
client/server virtual instrument designs for real-time
remote-access control engineering laboratory. In
Proceedings of the American control conference, Vol.
2, pp. 1472–1476.
Pinotti Jr., M., Brandão, D., 2005. A flexible fieldbus
simulation platform for distributed control systems
laboratory courses. The International Journal Of
Engineering Education, Dublin, v. 21, n. 6, p. 1050-
1058, 2005.
Torrisi, N. M. ;Oliveira, J. F. G. 2007. Remote Control of
CNC Machines using the cyberopc communication
system over public networks. International Journal of
Advanced Manufacturing Technology, v. 2007, p. 001,
2007
Torrisi, N. M., 2007. Sistemas de comunicação para redes
IP dedicado a dados industriais codificados em JSON.
Patente submetida ao Instituto Nacional da Propriedade
Industrial (INPI), sn 018070047508, 2007.
Yang, S.H.; Chen, X.; Alty, J.L., 2003. Design issues and
implementation of internet-based process control
systems. In: Control Engineering Practice (11) 2003,
709-720.
Yang, S. H., Dai, C., Knott, R.P., 2007. Remote
Maintenance of Control System performance over the
Internet, In: Control Engineering Practice, Volume 15,
Issue 5, May 2007, Pages 533-544
Yu, C. C., 2006. Autotuning of PID Controllers: A Relay
Feedback Approach. 2nd Edition, Springer, 2006.
Zheng, L., Nakagawa, H., 2002. OPC (OLE for process
control) specification and its developments, SICE
2002 – Proceedings of the 41st SICE Annual
Conference, pp. 917-920 vol. 2, 2002.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
284
