
CO-DESIGN FOR WIRELESS NETWORKED CONTROL OF AN
INTELLIGENT MOBILE ROBOT
Amine Mechraoui, Zeashan Hameed Khan, Jean-Marc Thiriet and Sylviane Gentil
Gipsa-Lab, Control departement INPG-UJF-CNRS, BP 46, 38402 Saint Martin d’H
`
eres, France
Keywords:
Autonomous mobile robots, Networked control systems, Wireless network, 802.15.4 protocol, Horizontal
handoff, TrueTime simulation.
Abstract:
This paper describes a wireless network based control of a Khepera mobile robot moving in a distributed
infrastructure. Due to critical dependence on wireless communication, a procedure for reconfiguration of the
network is proposed as a possibility to maintain communication between control station and the mobile robot
in a successful manner. The network handoff is made under a criterion that takes into account key application
dependent performance parameters. The controlled system and the communication network are simulated
respectively with Matlab/Simulink and TrueTime.
1 INTRODUCTION
Networked control systems (NCS) in mobile robotics
are getting very popular today. With the rapid
progress in communication techniques, especially the
wireless networks, distributed control and decision
have become mandatory to reduce the onboard pro-
cessing overhead. It includes control, decision, obsta-
cle avoidance etc; as it effects the battery consump-
tion in miniature robots with space and weight as key
design constraints. However, introducing a wireless
network in the control loops presents some disadvan-
tages such as band limited channels, sampling delays
and packet dropouts (Hespanha et al., 2007). Further-
more, the mobility of the robot also adds some prob-
lems, e.g. increasing the distance between the con-
trol station and the robot increases the number of lost
packets due to decreased signal strength and increased
bit error rate (BER) (Zhu et al., 2005).
The communication architecture in mobile robotics
may be centralized, in which case there is a fixed
or mobile node, which communicates with all the
other nodes, or decentralized, where individual mo-
bile nodes should ideally operate without any central
control (Schwager et al., 2007). In the decentralized
control scheme, each component solves a part of the
problem and shares memory without having a global
view of the mission. There is less emphasis on com-
putation than communication. In distributed control
systems, communication is an important parameter
and individual components don’t need to share mem-
ory (Martinez et al., 2007). In related research work,
many approaches have been used for distributed con-
trol of mobile robots. In (Fierro and Lewis, 1996) the
dynamic model of the mobile robot is controlled by
means of neural networks. In (Aicardi et al., 1995)
and (canudas de Wit and Sordalen, 1992), a nonlinear
control approach has been introduced. Another re-
search area, related to the hybrid architecture of con-
trol for autonomous navigation robots is studied in
(Benzerrouk et al., 2008).
The objective of this paper is to define a communi-
cation architecture for a mobile robot moving in a
2D space with several fixed stations (wireless infras-
tructure communication). According to the position
of the robot, communication is possible in a specific
coverage area with one or several stations (see Fig.
1). When several stations are reachable, the robot
will choose one of the stations (Horizontal Handoff
(HHO) strategy (Wang et al., 2007)) that can allocate
sufficient resources to ensure a good level of commu-
nication. This comprises of optimal choice of payload
and delay based on distance between robot and station
and thus maintaining the necessary Quality of Service
(QoS) in order to ensure that the Quality of Control
(QoC) is sufficient (distributed control). When there
is no station in the reachable space, the robot will
have to be absolutely autonomous (embedded con-
trol), maintaining a sufficient QoC despite a degrada-
tion of the communication QoS. The QoC in wireless
318
Mechraoui A., Hameed Khan Z., Thiriet J. and Gentil S. (2009).
CO-DESIGN FOR WIRELESS NETWORKED CONTROL OF AN INTELLIGENT MOBILE ROBOT.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 318-324
DOI: 10.5220/0002219303180324
Copyright
c
SciTePress
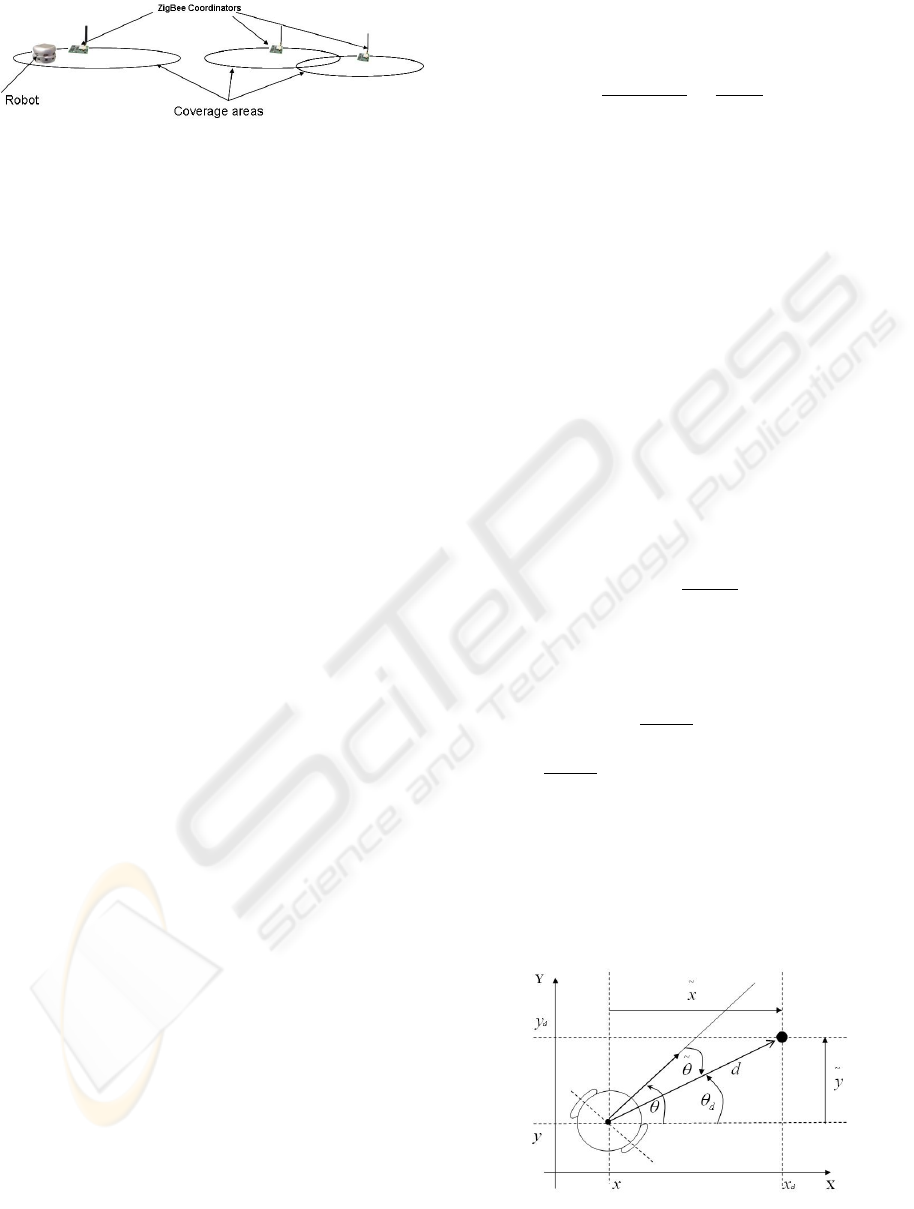
Figure 1: Problem description.
NCS is defined as the performance delivered by each
closed-loop operation. Stability is the main property
that must be guaranteed but control error and response
time are also important to analyse.
In the literature, many researchers have proposed a
HHO strategy. They proposed making a decision
by taking into account the Received Signal Strength
(RSS), the power consumption and the cost of com-
munication (Chen et al., 2004). We propose to add
the packet dropouts caused by the propagation delay
or the distance and orientation between the robot and
the station, which have a consequence on the QoC.
The paper is organized as follows. The second section
presents a brief description of the model of the Khep-
era robot, notably the kinematic model and the dy-
namic one. In the third section, the controller design
is described and simulations of the tracking trajectory
are presented. Section 4 presents the control over Zig-
Bee wireless network and the influence of the inte-
gration of this network on control performance. After
that, the proposed HHO architecture is described with
one, two and three stations. Finally, the conclusion
and perspectives are presented.
2 MODELING AND CONTROL
This section presents the study of a unicycle Khepera
robot (Lambercy and Caprari, 2007). Consider a uni-
cycle robot (Khepera) as shown in Fig. 2. Let x, y and
θ be the state variables where x ∈ ℜ and y ∈ ℜ are the
Cartesian coordinates, θ ∈ [0,2π[ is the robot’s orien-
tation with respect to the X-axis. We consider ‘v’ and
‘ω’ respectively as the linear and the angular veloci-
ties of the robot. The kinematic of the robot can be
modeled as
˙x = v cosθ, ˙y = vsin θ,
˙
θ = ω (1)
The kinematics model of the mobile robot has two
control inputs ω
le f t
and ω
right
i.e. the left and right
wheels velocities. These are related to the linear ve-
locity v and the angular velocity ω of the robot ac-
cording to the following equations
V
right
= v + Rω, V
le f t
= v − Rω (2)
where R is half the distance between the two robot’s
wheels. The dynamic model of the robot wheels is
characterized by the equations of the DC motors driv-
ing the wheels. They are represented by a first order
model
ω
∗
(le f t,right)
U
=
K
τs + 1
(3)
where U is the voltage applied to the motor and
ω
∗
(le f t,right)
are angular velocities generated by each
motor. τ is the time constant (τ = 0.63s) and K is the
gain (K = 5.3).
2.1 Controller Design
The objective of this section is to present how to con-
trol the robot to track any trajectory. Two levels of
controllers are required. The first one is needed to
control the angular velocities of the motors. PI con-
trollers are implemented. The second one controls
the linear and angular velocities of the robot. Let
us consider the controller presented in (Toibero et al.,
2007), where the robot can reach a desired target point
[x
d
y
d
θ
d
]. Errors are defined as
e
x = x
d
− x,
e
y = y
d
− y (4)
and the tracking error (Eq. 5a) and the orientation
error (Eq. 5b) are calculated as
d =
p
e
x
2
+
e
y
2
(5a)
e
θ = θ
d
− θ = tan
−1
(
e
y/
e
x) − θ (5b)
According to (Toibero et al., 2007), the following
control actions are defined
v =
v
max
1 + |d|
d cos(
e
θ) (6a)
ω =
v
max
1 + |d|
cos(
e
θ)sin(
e
θ) + K
e
θ
tanh(k
θ
e
θ) (6b)
where v
max
is the maximum linear velocity that the
robot can reach (v
max
= 0.3m/s) and K
e
θ
,k
θ
are con-
stants. Those controllers are stable according to
(Toibero et al., 2007) using the Lyapunov candidate
function V
t
.
V
t
=
e
θ
2
/2 + d
2
/2 (7)
Figure 2: Robot Model.
CO-DESIGN FOR WIRELESS NETWORKED CONTROL OF AN INTELLIGENT MOBILE ROBOT
319
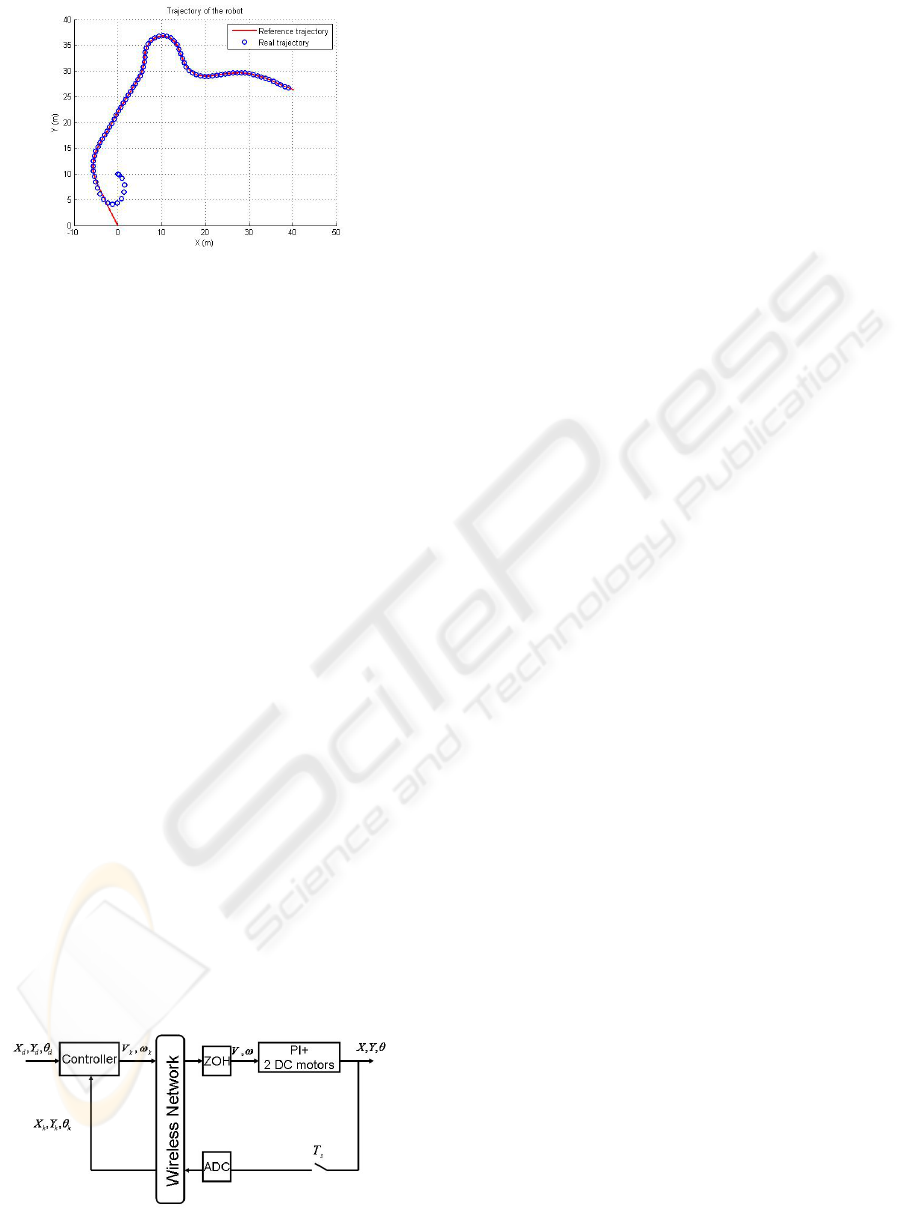
Figure 3: Real trajectory of the robot.
Fig. 3 shows the reference trajectory with initial con-
ditions [X
0
,Y
0
,θ
0
] = [0, 10,0] and the real trajectory
of the robot using those controllers. X, Y and θ are
measured each sampling time (T
s
= 0.03s). These re-
sults are obtained with Matlab/TrueTime. The PI con-
trollers are discretized and the voltage applied to the
motor is obtained with a zero order hold. The trajec-
tory is known in advance and the references x
d
, y
d
and
θ
d
are updated every 0.28s.
3 CONTROL OVER NETWORK
In this section, the controller is digitized and Zigbee
wireless network is integrated (see Fig. 4). The ef-
fects of network on control system are analyzed.
3.1 WPAN 802.15.4
ZigBee is a specification for small, low-power digital
radios based on the IEEE 802.15.4 standard for wire-
less personal area networks (WPANs). The low cost
allows the technology to be widely deployed in wire-
less control and monitoring applications. The low
power-usage allows longer life with smaller batter-
ies. The mesh networking provides high reliability
and larger range. The main reasons for adopting this
wireless network in our application is its low power
consumption and its ad-hoc networking capabilities.
Figure 4: Control over Zigbee network.
3.2 Control Over Zigbee
Control feedback loops are closed through a real-time
network as shown in Fig. 4.
To perform this study, the following conditions are
considered:
• A bit rate of 250 kb/s for Zigbee in the physical
layer.
• The sensor flow and the controller flow use 248
bits each. The sensor flow uses 3.3% and the con-
troller one uses 3.3% of the network capacity with
a sampling period T
s
equal to 30 ms.
TrueTime simulator is used to simulate Zigbee Net-
work. Two tasks are programmed, the first is the con-
troller task that generates the controller flow and the
second one is a periodic sensor task that generates
sensors flow. The controller task is event-triggered,
which means that the controller calculates and sends
the control signals V
k
and ω
k
when it has received all
measures X
k
,Y
k
and θ
k
. With the TrueTime Simula-
tion of ZigBee Network, there is only the CAP period
(Contention Access Period which uses CSMA/CA
protocol), therefore there is no priority mode like CFP
(Contention Free Period) which allows Guaranteed
Time Slots (GTS) (see (van den Bossche et al., 2007)
for more information about 802.15.4 protocol).
The sensor and control data are critical to keep the
stability of the system, hence packet losses are unde-
sirable. Practically, loss of packets cannot be entirely
eliminated in wireless networks. A lot of methods e.g.
Forward Error Correction (FEC) (Kurose and Ross,
2004) are proposed to reduce the probability of packet
losses. The retransmission of lost packets is proposed
too but for a real-time application, this is an inappro-
priate solution. When a packet has been discovered to
be lost and is retransmitted, the sensors state evolve to
a newer one and thus the retransmitted packet will be
based on the old information and the calculated con-
trol will be wrong. The solution to ensure the best
control is to do over sampling, with a sampling rate
higher than what is needed, which therefore makes
control more tolerant to packet losses. However,
this solution increases the Use Request Factor (URF)
and causes more packet delays and losses (Mechraoui
et al., 2008). The minimal sampling period to ensure
a good QoC is 0.3 s in our example. To increase the
QoC over wireless network and decrease the proba-
bility of losing packets of critical data, the sampling
period of 30 ms is required. Fig. 5 shows that the
robot can communicate with the station only within
the coverage range of the station. When it losses the
communication, it keeps the last value of the linear
and angular velocities and it deviates from the refer-
ence trajectory. The progress of WPAN and the util-
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
320
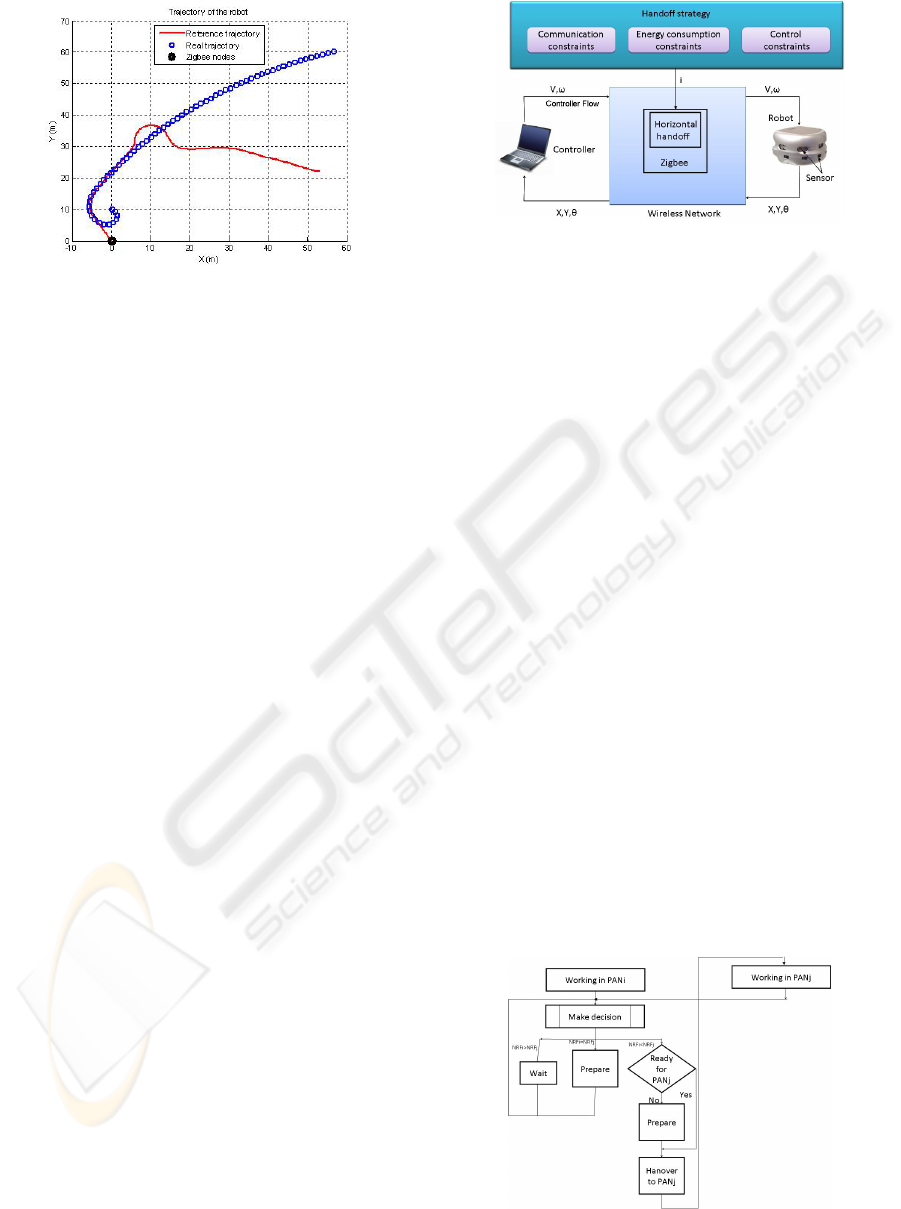
Figure 5: Trajectory of the robot with one Zigbee station.
isation of this kind of wireless networks allow the
robot to find another station (PAN) to communicate
for control. Therefore, we assume that we have dif-
ferent stations that the robot can communicate with.
The next section explains how to change stations to
ensure sufficient QoS.
4 STATION SELECTION
4.1 Handoff Decision
For several stations, mobility management is pro-
posed through redundancy in network communication
by searching for the best available protocol based on
a cost function. Horizontal and vertical handoff can
be proposed. A horizontal handoff (HHO) is the link
transfer between two network access points that use
the same network technology while vertical handoff
(VHO) is between two network access points using
different network technologies. (Chen et al., 2004)
describes a smart decision model to decide the best
network interface and best time for VHO. (Stevens-
Navarro and Wong, 2006) gives a comparison be-
tween four different VHO decision algorithms w.r.t
to bandwidth and delay for different traffic classes.
(Wang et al., 1999) describes a policy-enabled hand-
off system that allows users to express policies, based
on the estimation of current network conditions and
determining the best network at any moment by char-
acteristics e.g. cost, performance and power con-
sumption. (Nkansa-Gyekye and Agbinya, 2007) pro-
poses a distributed additive weighting based VHO
mechanism to reduce the processing overhead in the
mobile terminal by delegating the calculation of hand-
off metrics for network selection to the visiting net-
works. (Angermann and Kammann, 2002) evaluates
different structures for cost functions and presents a
simulation for the influence of various parameters.
Figure 6: Network HHO strategy for a mobile robot control.
The challenge in handoff is to maintain the applica-
tion session alive while the physical connection inter-
face is changed. A generic weighted ‘Network Rating
Function’ evaluation for each network is based on
NRF
i
= W
RSSI
N
RSSI,i
+W
NL
N
NL,i
+W
D
N
D,i
(8)
W
RSSI
+W
NL
+W
D
= 1 (9)
where W
RSSI
, W
NL
and W
D
are weighting functions
of RSSI, network load (NL) and delay (D) respec-
tively. N
RSSI,i
, N
NL,i
and N
D,i
indicate the scores of
interface. NRF
i
is between 0 and 1. W
i
is the weight
of the factor i, which emphasizes the importance of
each contributing factor and N
i, j
represents the nor-
malized score of the interface
0
j
0
for factor
0
i
0
.
The embedded logic in the mobile robot, assigns
different “weights” to the handoff decision parame-
ters in order to determine the level of importance of
each parameter for the information to be exchanged
between neighbors. In our case W
RSSI
> W
NL
> W
D
.
The best station connection interface at any given mo-
ment is then chosen as the one that achieves the high-
est score among all candidate interfaces.
In our scenario, factors within N
i, j
include QoS pa-
rameters i.e. the RSSI, the network load (NL) and
Delay or latency (D) of the candidate network. Now
we calculate NRF
i
and NRF
j
to choose accordingly
(which ever is greater) the station that maximizes the
Figure 7: HHO state diagram.
CO-DESIGN FOR WIRELESS NETWORKED CONTROL OF AN INTELLIGENT MOBILE ROBOT
321
decision criteria (Fig. 7).
Additionally, there is a corresponding function for
each term N
RSSI,i
, N
NL,i
, and N
D,i
, and the ranges of
the functions are bounded between 0 and 1. The func-
tions are given in Eq. (10).
N
RSSI,i
=
e
P
r
e
P
s
(10a)
N
NL,i
= 1/e
NL
| 0 ≤ NL ≤ 1 (10b)
N
D,i
=
(
1 if S
i
is the current station & RSSI > −48dBm
0 if not
(10c)
In our case, the transmitted power is equal to −3dBm
and the receiver signal threshold is equal to −48dBm.
The RSSI is calculed as follow
P
r
=
1
d
α
P
s
(11a)
RSSI(dBm) = 10log(P
r
(mW )) (11b)
where P
r
and P
s
are the power in mW received and
sent respectively. d is the distance between the two
nodes in meters, and α is a parameter that can be cho-
sen to model different environments.
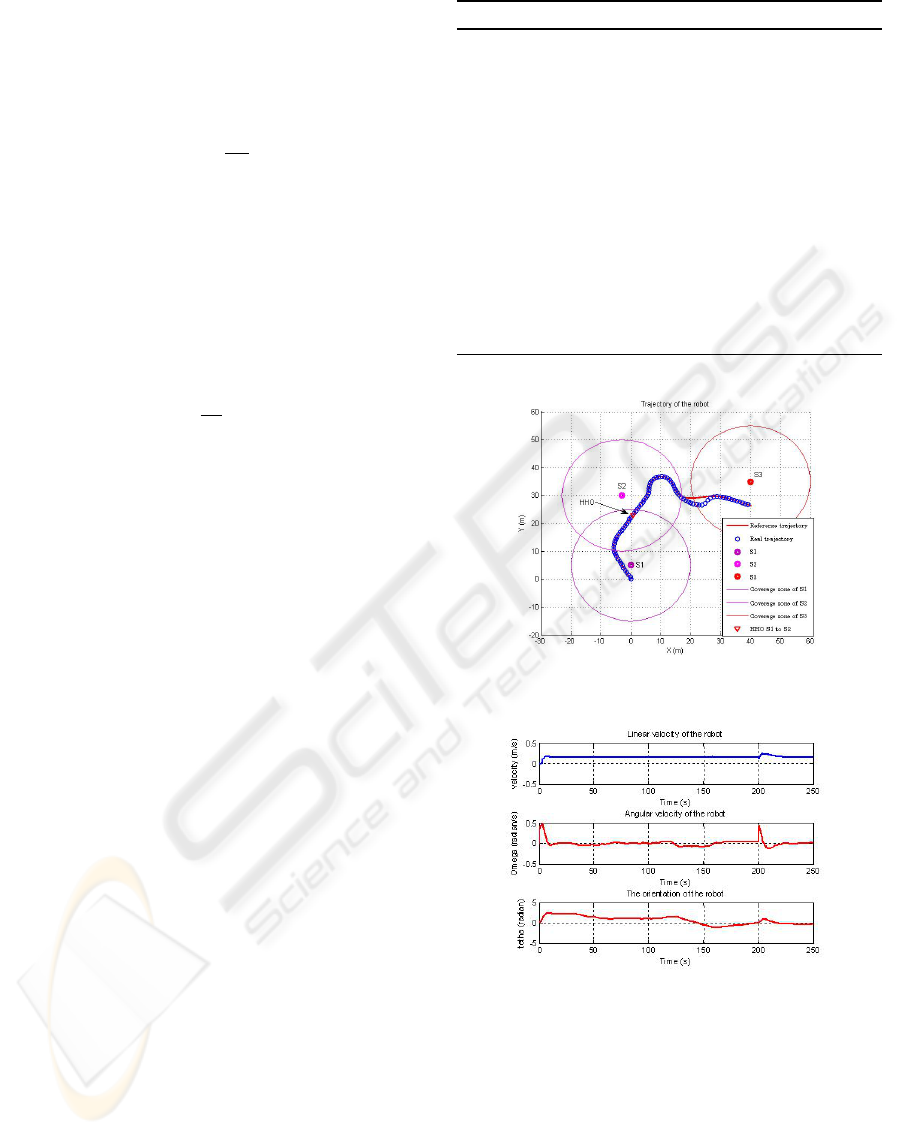
Fig. 8 shows the trajectory of the robot with changes
in station if necessary (QoS is the best to ensure the
best QoC). The stations positions are
• For the first station (S
1
) (0, 5) (m)
• For the second station (S
2
) (-3, 30)
• For the last station(S
3
) (40, 35).
For this experiment, the weight values are W
RSSI
=
0.8, W
NL
= 0.15 and W
D
= 0.05.
We assume that S
1
and S
2
have a common coverage
area, and S
3
is far. According to the initial position of
the robot (here (X
0
,Y
0
,θ
0
) = (0,0,0)) the robot com-
municates first with S1. It continues its trajectory un-
til the robot detects the second station. In this case,
Khepera executes Algorithm 1.
To understand this algorithm, symbols are used. r is
the mobile robot, S
i
is the current station, S
{1,2,..k}
are
all the stations and S
{m,...,n}
are the stations that are
detected by the robot. We note the fact that the robot
detects a set of stations by the symbol .
When the robot is out of range of all stations, it
keeps the last values of the angular and the linear ve-
locities which is not a good solution because it can
result in an important error with respect to the refer-
ence trajectory and cause problems (see Fig.8). We
propose in this case to change the controller and use
an embedded one.
Figures 10 and 11 show the change of stations. In
Algorithm 1: Decision algorithm.
if r {S
m
,..., S
n
} | m ∈ {1,..., k} and
n ∈ {1,..., k} | m 6= n then
calculate NRF for all S
m
,...S
n
for all i and l ∈ {m, ...,n} do
if NRF
S
i
< NRF
S
l
then
i = l
else if NRF
S
i
> NRF
S
l
then
i = i
Wait
else
i = i
end if
end for
end if
Figure 8: Trajectory of the robot with HHO with NL=0.
Figure 9: Evolution of the linear and angular velocities.
Fig.10, the simulation is made with NL=0 for all sta-
tions. The change from S
1
to S
2
depends thus on the
distance between the robot and the station. The robot
changes the station only if the RSSI of the current sta-
tion is poor. In Fig.11, the simulation is made under
the assumption that the NL
S
1
= 0.8 which means that
the network is 80% loaded and NL
S
2
= 0.2. In this
scenario the robot decides to change the station ac-
cording to the RSSI of both stations and the network
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
322
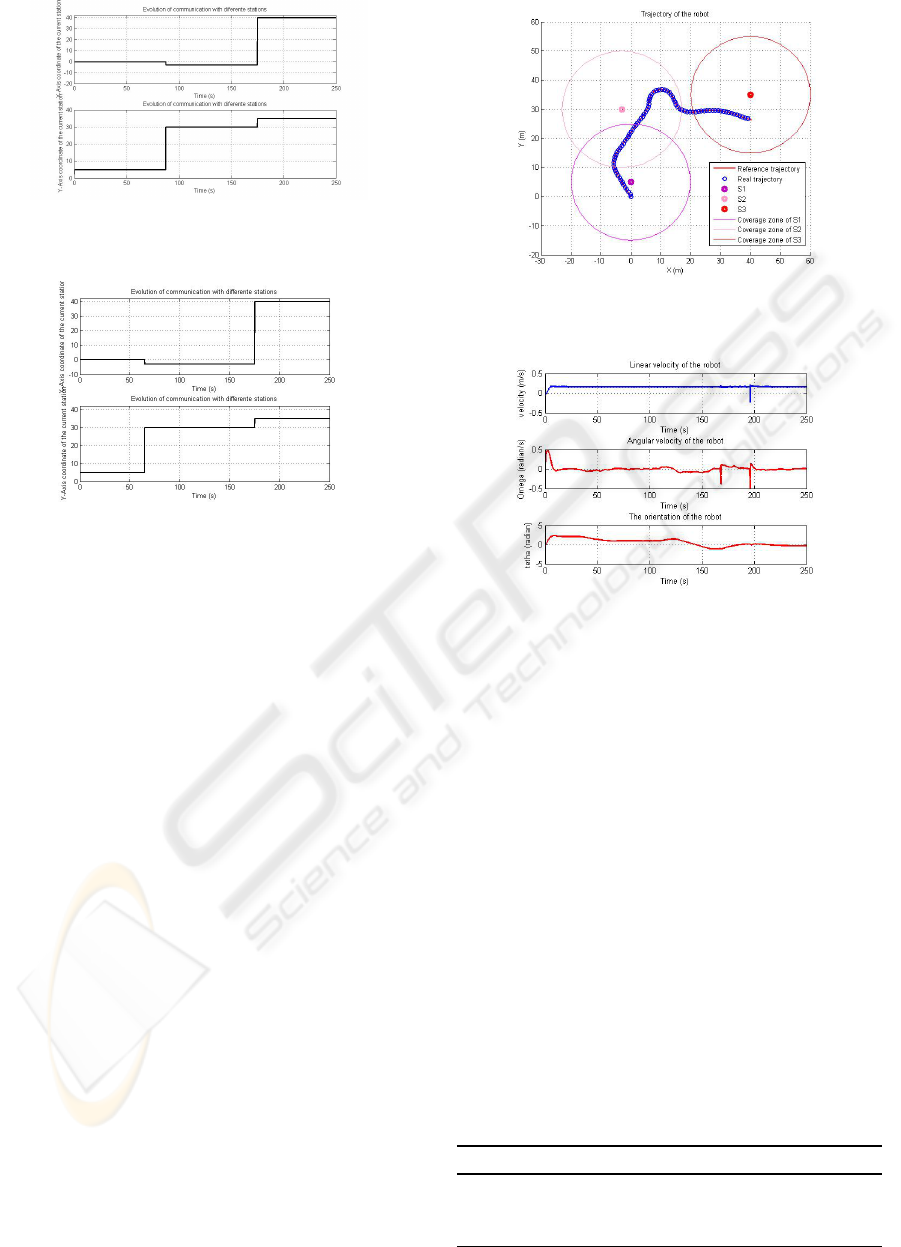
Figure 10: Evolution of communication with different sta-
tions with HHO with NL=0 (corresponds to Fig.8).
Figure 11: Evolution of communication with different sta-
tions with HHO with NL
S
1
= 0.8 and NL
S
2
= 0.2.
load of each station. Comparing Fig.10 and Fig.11 the
HHO of the station is quite sensitive to parameter NL.
4.2 Control Decision
As the robot moves outward towards another control
station, the signal strength decreases. The low value
of RSSI is sensed by the mobile robot, which then re-
quests the station for an estimation of next way-point.
The control station sends the trajectory information as
well as broadcasts the “standby” message to all con-
trol stations in the infrastructure to minimize the time
of connection of robot for the next cell. Thus, a PAN
slot is reserved in advance for the coming robot as
the trajectory is already estimated. This proposition
permits to maintain a sufficient QoC despite a degra-
dation of the QoS.
The embedded control design is the same than the
distributed one. The only difference is that the sam-
pling period is changed. The controller computes
control signals each 0.3 s. This change is very im-
portant to reduce the energy consumption and also
the execution time. Algorithm 1 and 2 is executed
(“poor” in Algorithm 2 means that the RSSI of the
current station comes near the receiver signal thresh-
old). Fig.12 show the simulation when the control is
switched within the non covered area.
Figure 12: The trajectory of the robot with switching con-
troller.
Figure 13: Evolution of linear and angular velocities of the
robot with switching controller.
5 CONCLUSIONS
This work aims to study, in a co-design approach, the
influence of a wireless network QoS on the QoC of
a teleoperated robot. A wireless network based con-
trol of a unicycle mobile robot in a distributed infras-
tructure mode is described. The simulations are per-
formed using Matlab/TrueTime toolbox. The problem
faced was a loss of communication when the mobile
robot moves out of range or there is an excessive net-
work load that prohibits successful communication.
The first strategy consists of adapting the network
QoS to the control requirements. An algorithm for
reconfiguration by HHO is proposed as a solution
to maintain communication between control stations
and the mobile robot in multi stations scenarios. The
HHO is made with a criterion that takes into account
Algorithm 2: Decision algorithm.
if NRF = poor and r S
i
then
Switch controller
end if
CO-DESIGN FOR WIRELESS NETWORKED CONTROL OF AN INTELLIGENT MOBILE ROBOT
323

the QoC for the robot as well as the QoS of wireless
network.
The second strategy deals with the reconfiguration of
the control, for the robot to be autonomous, when the
communication link is out of order. Therefore, if the
robot is out of range of all stations, the control mode
is switched to embedded control, increasing the sam-
pling period to reduce computations and the robot is
completely autonomous. Integration of WLAN could
be a choice for extended zone coverage for mobile
robots.
In the future work, a quantification of QoS and QoC
will be dealt. A combination of infrastructure and ad-
hoc architecture will also be investigated in order to
maintain sufficient QoC in multi robots perspective.
ACKNOWLEDGEMENTS
This work is partially supported by the Safe NeCS
project funded by the French Agence Nationale de la
Recherche under grant ANR-05-SSIA-0015-03.
REFERENCES
Aicardi, M., Casalino, G., Bicchi, A., and Balestrino, A.
(1995). Closed loop steering of unicycle like vehicles
via Lyapunov techniques. In IEEE Robotics and Au-
tomation Magazine, volume 2(1), pages 27–35.
Angermann, M. and Kammann, J. (2002). Cost metrics
for decision problems in wireless ad-hoc networking.
In IEEE CAS Workshop on Wireless Communications
and Networking, Pasadena, California, USA.
Benzerrouk, A., Adouane, L., Martinet, P., and Andreff,
N. (2008). Toward an hybrid control architecture for
a mobile multi-robot systems. In Proceeding of the
3
rd
National Conference on Control Architectures of
Robots, Bourges, France.
canudas de Wit, C. and Sordalen, O. (1992). Exponen-
tial stabilization of mobile robots with non-holonomic
constraints. In IEEE Trans. Automatic Control, vol-
ume 37, pages 1792–1797.
Chen, L.-J., Sun, T., Chen, B., Rajendran, V., and Gerla,
M. (2004). A smart decision model for vertical hand-
off. In Proceedings of the 4
th
International Workshop
on Wireless Internet and Reconfigurability, Athens,
Greece.
Fierro, R. and Lewis, F. (1996). Practical point stabiliza-
tion of a nonholonomic mobile robot using neural net-
works. In Proceeding Conference on Decision and
Control, Kobel, Japan.
Hespanha, J., Naghshtabrizi, P., and Xu, Y. (2007). A sur-
vey of recent results in networked control systems. In
Proceeding of IEEE special issue on Technology of
Networked Control Systems, volume 95, pages 138–
162.
Kurose, J. and Ross, K. W. (2004). Computer Networking:
A Top-Down Approach Featuring the internet. Addi-
son Wesley, 3
rd
edition.
Lambercy, F. and Caprari, G. (2007). Khepera3 user manual
version 2.2. Technical report.
Martinez, S., Corts, J., and Bullo, F. (2007). Motion coordi-
nation with distributed information. In IEEE Control
Systems Magazine, volume 27(4), pages 75–88.
Mechraoui, A., Thiriet, J.-M., and Gentil, S. (2008). Con-
trol of an intelligent robot system over a wireless net-
work. In Proceeding of the 23
rd
IAR Workshop on
Advanced Control and Diagnosis, Coventry, United
Kingdom.
Nkansa-Gyekye, Y. and Agbinya, J. (2007). Vertical hand-
off decision algorithm for umts-wlan. In Proceed-
ing of the 2
nd
International Conference on Wire-
less Broadband and Ultra Wideband Communica-
tions, Sydney, Australia.
Schwager, M., Slotine, J., and Rus, D. (2007). Decen-
tralized, adaptive control for coverage with networked
robots. In Proceeding of IEEE International Confer-
ence on Robotics and Automation, Roma, Italy.
Stevens-Navarro, E. and Wong, V. (2006). Comparison be-
tween vertical handoff decision algorithms for hetero-
geneous wireless networks. In Proceeding of the 63
rd
IEEE Vehicular Technology Conference, volume 2,
pages 947–951.
Toibero, J. M., Carelli, R., and Kuchen, B. (2007). Switch-
ing control of mobile robots for autonomous naviga-
tion in unknown environments. In Proceeding of IEEE
International Conference on Robotics and Automa-
tion, Roma, Italy.
van den Bossche, A., Val, T., and Campo, E. (2007). Proto-
typing and performance analysis of a qos mac layer
for industrial wireless network. In Proceeding of
the 7
th
IFAC International Conference on Fieldbuses
and Networks in Industrial and Embedded Systems,
Toulouse, France.
Wang, H., Katz, R., and Giese, J. (1999). Policy-enabled
handoffs across heterogeneous wireless networks. In
Proceeding of the 2
nd
IEEE Workshop on Mobile
Computing Systems and Applications, New Orleans,
Louisiana, USA.
Wang, L., Chen, A., and Chen, H. (2007). Network se-
lection with joint vertical and horizontal handoff in
heterogeneous wlan and mobile wimax systems. In
Proceedings of the 63
rd
IEEE Vehicular Technology
Conference, Melbourne, Australia.
Zhu, H., Yang, Q., and Kwak, K. (2005). Performance anal-
ysis of fast handoff with mobility prediction. In Pro-
ceeding of IEEE International Symposium on Commu-
nications and Information Technology, Beijing, China.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
324
