
INTEGRATED PATH PLANNING AND TRACKING FOR
AUTONOMOUS CAR-LIKE VEHICLES MANEUVERING
Fernando G
´
omez-Bravo, Diego A. L
´
opez
Departamento de Ingenier
´
ıa Electr
´
onica, S. I. y Autom
´
atica, University of Huelva, 21819 La R
´
abida, Huelva, Spain
Francisco Real, Luis Merino, Jos
´
e M. Matamoros
Robotics, Vision and Control Group,University of Seville, Camino de los Descubrimientos, 41092 Sevilla, Spain
Keywords:
Autonomous Car-like vehicle, Maneuvering, Motion Planning, Path-tracking.
Abstract:
This paper proposes a new method for control car-like vehicles maneuvering. For this purpose, traditional
planning and tracking algorithms has been modified in order to follow complex maneuvers in a frame of a
distributed control architecture. Thus, planning and tracking algorithm run in different platforms exchanging
data in order to control the maneuvers performance.
1 INTRODUCTION
Autonomous navigation of car-like vehicles is a well
known topic that has attracted the attention of many
researchers (Paromtchik et al., 1998), (Ollero et al.,
1999), (Gomez-Bravo et al., 2001), (Wada et al.,
2003), (Cuesta et al., 2004), (Daily and Bevly, 2004).
Navigation in cluttered scenarios usually involves
maneuvering that require stopping the vehicle and
changing the sign of the vehicle velocity to avoid col-
lisions. The non-holonomic constraints of the car-like
vehicles play an important role. Path tracking (Ollero
et al., 1994), (Ollero et al., 1996) and path planning
techniques (Latombe, 1991), (Laumont et al., 1994),
(LaValle, 2006) have been largely approached in mo-
bile robot literature. However, generating and track-
ing car-like maneuvers are not frequently reported
(Cheng et al., 2001), (Wada et al., 2003), (Cuesta
et al., 2004). This paper presents a new integrated
architecture particularly designed for planning and
tracking maneuvers. Furthermore, this strategy can
be also applied when complex maneuvers are not re-
quired.
Real-time path planning usually requires signifi-
cant computational resources that could overload the
limited on-board processing capability. Then, a suit-
able alternative is to implement the planner on exter-
nal dedicated servers that could provide this capabil-
ity to one or several networked autonomous vehicles.
These servers could be also networked with sensors in
the environment providing information for navigation
(Gomez-Bravo et al., 2007).
In this paper a distributed implementation inte-
grating both maneuvers planning and tracking tech-
niques for autonomous car-like maneuvering is pre-
sented. The novelty of this method is the adaptation
of the planning and tracking method so that both can
work in different computer, establishing a communi-
cation process between the planner and the tracker
system in order to control effectively the maneuver
performance.
On the one hand, the planning method applied in
this paper is based on the Rapidly Exploring Random
Trees algorithm (RRT) (LaValle, 1998), (Bruce and
Veloso, 2002) (LaValle, 2006). This technique can
be easily extended to non-holonomic vehicles pro-
viding simple solutions for car-like maneuvers gen-
eration (LaValle and Kuffner, 1999), (Gomez-Bravo
et al., 2008). In the present approach, besides ob-
taining path for maneuvering in complex scenarios,
the planner is capable of dividing the originally com-
puted maneuver into different sections in order to fa-
cilitate the tracking task and allowing to modify eas-
ily the original path if changes in the initial map are
detected. On the other hand, the path tracking tech-
nique is a modified version of the well known pure
pursuit geometric approach (Ollero, 2001). The orig-
inal tracking strategy has been modified so that this
method can be applied for maneuvers tracking. More-
over, and different from previous approaches, in the
457
Gómez-Bravo F., A. López D., Real F., Merino L. and M. Matamoros J. (2009).
INTEGRATED PATH PLANNING AND TRACKING FOR AUTONOMOUS CAR-LIKE VEHICLES MANEUVERING.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Robotics and Automation, pages 457-464
DOI: 10.5220/0002219504570464
Copyright
c
SciTePress
architecture presented in this paper the planner de-
termines the maneuver performance by establishing
some of the tracker parameters.
The paper is organized as follows: in the next sec-
tion the basis of the car-like vehicles maneuvering is
introduced and the application of the RRT to maneu-
vers generation is also presented. Section 3 is devoted
to describe the adaptation of the path tracking algo-
rithm for maneuvering. In section 4 the proposed im-
plementation is presented. Finally, in section 5, ex-
perimental results, obtained with a real autonomous
car-like vehicle when maneuvering in an outdoor sce-
nario, are presented. The paper ends with the conclu-
sions and the references.
2 CAR-LIKE VEHICLES
MANEUVERING
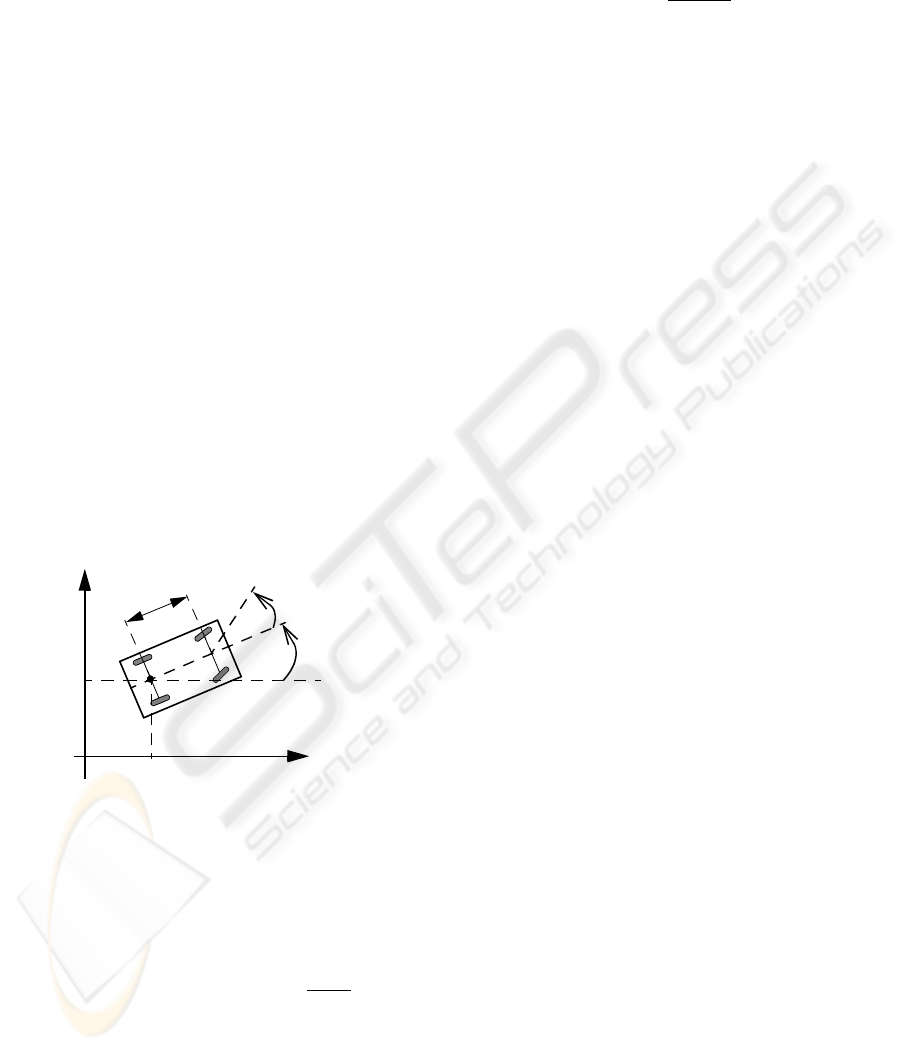
2.1 Car-Like Vehicles
Car-Like vehicles are non-holonomic systems charac-
terized by kinematics constraints resulting in noninte-
grable differential equations that should be taken into
account for motion planning and obstacle avoidance.
φ
x
θ
Y
X
ρ
ϕ
ρ
max
ϕ
max
y
ϕ
max
ρ
max
l
Figure 1: Car-like vehicle.
Usually, the kinematics model of car-like vehicles
is expressed as:
˙x
˙y
˙
θ
=
cos(θ) 0
sin(θ) 0
0 1
·
v(t)
v(t)
tanφ(t)
l
(1)
where (x, y) is the position of the rear reference point,
and θ is the vehicle’s heading, both in a global ref-
erence frame, v(t) is the linear velocity, φ(t) is the
steering angle, that defines the curvature of the path,
and l is the distance between the rear and front wheels
(see Fig. 1).
Typically, the values of φ(t) are constrained by
the value φ
max
, accomplishing the relation
R
min
=
l
tanφ
max
(2)
where R
min
is the minimum curvature radius.
Each wheel of the vehicle presents a kinematics
constraint which prevents the robot from moving to
the orthogonal direction of the wheels longitudinal
axe. Then, the kinematics of these vehicles is usu-
ally characterized by the following differential non-
holonomic equation
˙x · sinθ − ˙y · cosθ = 0. (3)
In the next section, the basis of the method for
coping with this constraint, when planning trajecto-
ries, are presented.
2.2 Continuous Navigation vs.
Maneuvering
There are different approaches to car-like vehicles
motion planning (Laumont et al., 1994), (Cheng
et al., 2001), (Gomez-Bravo et al., 2008). Path plan-
ning techniques provides trajectories based on differ-
ent searching techniques (Latombe, 1991), (LaValle,
2006). Particularly, the randomized methods have
attracted considerable attention (Barraquand and
Latombe, 1991), (Amato and Wu, 1996), (Cheng
et al., 2001), (Bruce and Veloso, 2002). Due to
the non-holonomic nature of these vehicles, many
of these methods require further processing in order
to obtain a path accomplishing the kinematics con-
straints. Thus, derivable and continuous curvature tra-
jectories are frequently provided by these techniques.
However, when cluttered scenarios are involved, com-
plex maneuvers may be needed, and path gener-
ation should also include inversor con figurations,
(Latombe, 1991), i.e configurations where the sign of
the vehicle velocity changes. In these cases, discon-
tinuous curvature trajectories can also be considered
as admissible paths, although the kinematics con-
straints still have to be accomplished.
2.3 Planning Maneuvers
General strategies for maneuvers generation have not
been frequently addressed, (Latombe, 1991), (Lau-
mont et al., 1994), (LaValle, 2006). Recent ap-
proaches have focused attention in car-like parking
maneuvers (Paromtchik et al., 1998), (Gomez-Bravo
et al., 2001), (Cuesta et al., 2004).
The method presented in this paper is based
on a planner previously presented in (Gomez-Bravo
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
458
et al., 2007) and (Gomez-Bravo et al., 2008). This
method takes the advantage of a randomized genera-
tion process, the original Bidirectional RRT algorithm
(LaValle, 1998), (Bruce and Veloso, 2002) adapted to
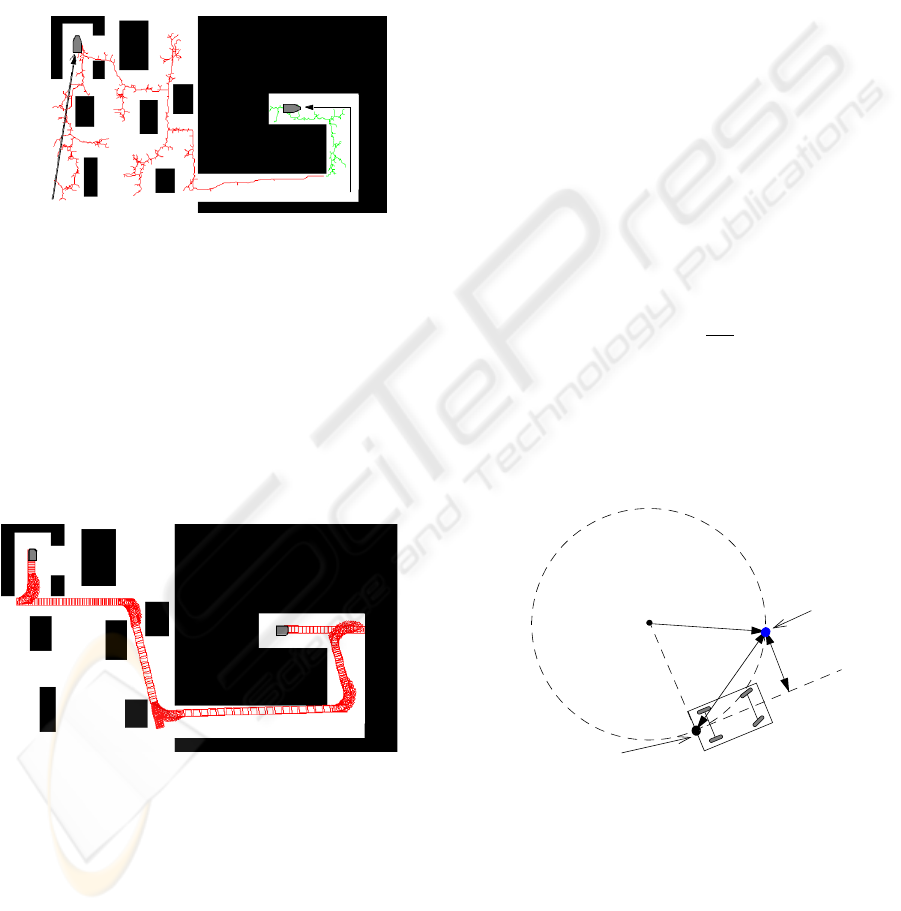
non-holonomic vehicles. Firstly, RRT is used with-
out considering any kinematics constraints providing
a data structure (two trees with free collision config-
urations) connecting the initial with the goal configu-
ration (see Fig. 2).
Initial Configuration
Goal Configuration
Figure 2: RRT connecting trees.
In the next step, the tree provided by the algorithm
is turned into a sequence of feasible admissible paths
by means of a set of connecting path previously de-
signed (see Fig. 3). Each of these connecting paths are
built from a set of basic canonical maneuvers. Exam-
ples of these canonical maneuvers for car-like vehi-
cles have been previously reported in (Gomez-Bravo
et al., 2001), (Cuesta et al., 2004) and (Gomez-Bravo
et al., 2008).
Figure 3: Final path.
As it is shown in (Gomez-Bravo et al., 2008), by
means of this procedure, any two configurations can
be connected by an admissible path. It is remarkable
that, with this methods, the planner generates trajec-
tories for both strategies: traditional continuous nav-
igation, without stopping, or maneuvering navigation
when necessary. That is, the planner includes inver-
sors on the trajectory when a cluttered environment
requires the vehicle to stop several times.
3 MANEUVERING NAVIGATION
CONTROL
In this section the basis of the tracking method are il-
lustrated. The particular problems of performing ma-
neuvers are also addressed. Finally, the convenient
modifications of the path following method for exe-
cuting complex maneuvers are presented.
3.1 Continuous Path-tracking
Different approaches have been proposed for path fol-
lowing, where the vehicle position is estimated by an
Extended Kalman Filter (EKF) (Grewal and Andrews,
1993) using Global Positioning System (GPS) (Daily
and Bevly, 2004) and odometry.
In the approach presented in this paper, an accu-
rate path-tracking strategy is accomplished by apply-
ing a modified version of the “Pure-pursuit” algorithm
(Ollero, 2001). In this algorithm a point of the refer-
ence path is selected at each time instant so that the
steering angle is obtained according to the expression:
φ = arctan(l ·
24
L
2
H
) (4)
where l is defined in Fig. 1 and L
H
is a parameter
called the look-ahead, which represents the distance
between the target point and the vehicle’s current po-
sition, and 4 is the lateral distance between the robot
and the target point (see Fig. 4).
r
L
H
∆
r
∆
(x
n
, y
n
)
s
(x
t
, y
t
)
Path
Current robot’s position
Target point
Target point
Figure 4: Circular trajectory.
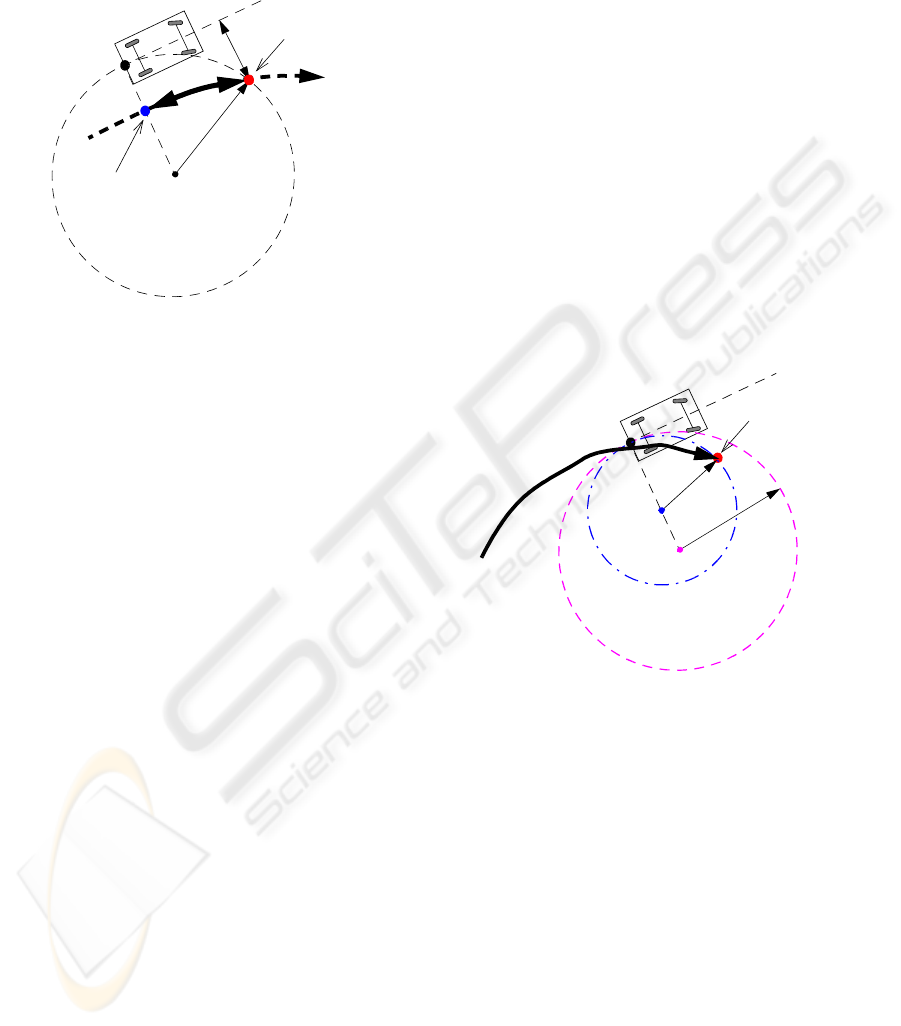
With this driving strategy the vehicle will follow
a circular arc from its current position to the target
point. Usually the point of the path is selected by the
following procedure: a) firstly, the nearest point, (x
n
,
y
n
), to the vehicle is obtained; b) secondly, from (x
n
,
y
n
) the target point (x
t
, y
t
) is found as the one which is
at the distance L
H
, from the current vehicle’s position
in the direction of the desired motion, (see Fig. 5). In
INTEGRATED PATH PLANNING AND TRACKING FOR AUTONOMOUS CAR-LIKE VEHICLES MANEUVERING
459
this way at each time instant, from an estimated vehi-
cle configuration, a new point of the path is selected
and the vehicle navigates following the desired direc-
tion.
r
L
H
∆
r
∆
(x
n
, y
n
)
s
(x
t
, y
t
)
Path
Current robot’s position
Target point
Target point
Figure 5: Pure-pursuit.
There could be different criteria for selecting the
value of L
H
according to the velocity and the shape of
the path. In this approach the selection of the velocity
and the look-ahead value is determined by the planner
taking into account the characteristics of the planned
trajectory.
3.2 Maneuvers Path-tracking
Traditionally, continuous navigation is based on a se-
quential procedure: first the planner provides a path
connecting the starting point with the goal configura-
tion and finally the tracking algorithm is applied so
that the vehicle follows the trajectory until the vehi-
cle arrives to the end of the path. In this way, path-
following algorithms are usually designed so that the
tracking error decrease as the vehicle follows the ref-
erence path. However, errors use to increase when
the vehicle arrive to the goal configuration. Clearly,
stopping the vehicle involves slipping phenomenon,
particularly when the vehicle navigates outdoor on ir-
regular terrains. Obviously, this is a drawback, spe-
cially when the vehicle is performing maneuvers as
the vehicle has to stop several times. Thus, if a trajec-
tory to be followed presents inversors, the traditional
procedure need to be improved.
The present approach is based on developing two
independent modules, the planner and the tracker, that
take the responsibility of planning and tracking the
maneuver respectively. These two modules will inter-
act so that they manage the maneuver performance.
The planner, once a initial trajectory has been gen-
erated, will divide it in path sections, separated by
inversors. Each path section will have associated a
kinematics profile and a look-ahead determined by the
planner. The tracker will receive sequentially each of
the path sections and will apply the tracking algorithm
until the inversor configuration is reached. When the
vehicle is stopped over a inversor the tracker will ask
the planner for the next section of the path. This pro-
cedure will be repeated until the whole maneuver is
performed.
Clearly, stopping the vehicle over the inversor is a
very difficult task. A simple approach for managing
the stopping process consist on decreasing, the vehi-
cle velocity as it is closed to the inversor. The tracker
will stop the vehicle when the position error is lower
than a threshold. However a problem could appear
when this strategy is applied. If the vehicle configu-
ration and the inversor fall in a circular arc which ra-
dius is shorter than minimum curvature radius, R
min
,
the vehicle will be trapped in a circular trajectory in
which the position error never decrease (see Fig. 6).
R
Inversor
R
min
Path
Figure 6: Pure pursuit problem.
Thus, the tracking algorithm will stop following
that section of the path if this situation is detected,
and asks the planner for the next section to follow.
4 DISTRIBUTED
IMPLEMENTATION
Motion control of autonomous vehicles requires real
time attention to different task. For instance, getting
the GPS lecture, reading the proximity sensors, run-
ning the path tracking algorithm etc, are procedures
that need a tailored use of the time into the control
loop. Nevertheless, path planning usually presents a
high computational cost. Then, implementing these
algorithms and the vehicle control program into the
same computer machine could negatively affect the
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
460
distribution of the time control loop. In order to avoid
this problem, in this approach, the planning algorithm
is executed on a computer different to the one contain-
ing the autonomous vehicle control program. Thus a
distributed strategy has been implemented by using an
auxiliary server. This computer has been configured
so that planning task are executed. Moreover other
external interactions are also performed (collecting
information from external sensors or attending human
interface for instance). The novelty of this approach
is based on the relation between the vehicle control
program and the services running into the auxiliary
server. As was mentioned in the previous section,
there are parameters of the tracking algorithm (veloc-
ity and look-ahead) that are computed in the auxiliary
server from the path provided by the planning algo-
rithm.
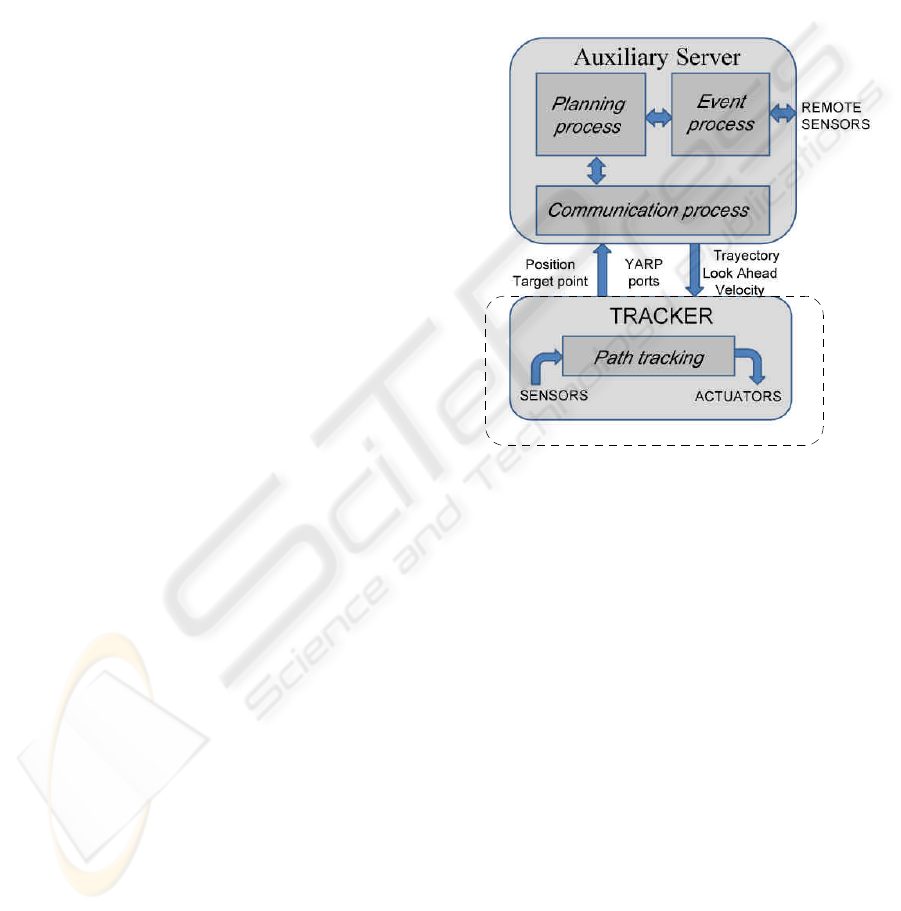
The proposed implementation is shown in Fig. 7.
The auxiliary server communicates with the au-
tonomous vehicle by means of WIFI devices, using
the TCP protocol. In this way the YARP protocols
and services have been used. Considering the OSI
Reference Model the YARP protocols could be placed
on the Session Layer. This procedure allow transmit-
ting object data defined in the C/C++ format. These
protocols provide several net ports independent from
the operative system. Thus, it represents a flexible so-
lution for implementing the dialog between the nav-
igation control algorithm and the process running at
the auxiliary server, being independent from the com-
puter platform.
The global planner program has two process run-
ning in parallel. The first one is the planner itself, i.e,
the responsible of providing admissible paths. The
second one, establishes and maintains the communi-
cation between the planner and the tracker through
the YARP port. By means of this process the plan-
ner receives continuously the vehicle position and the
goal point over the current path section. If the vehicle
navigates too far from reference path or the scenario
changes, the planner decides whether the current path
section is computed again or not. As was described
before, the path is divided into sections separated by
the inversor configurations, and the vehicle follows
sequentially the path sections. Thus, in case of any
possible eventuality (new obstacles on the map, large
position error or the vehicle being trapped by a circu-
lar trajectory), the planner modifies the affected path
section. Only if these changes involve the current path
section, the vehicle has to stop. Otherwise, the modi-
fications are transmitted to the autonomous vehicle in
a sequential procedure.
Additionally, the planner determines the value of
the look-ahead and velocity associated to each sec-
tion of the path. It establishes these values according
to their characteristic, taking into account the curva-
ture and the length. An heuristic procedure for setting
the vehicle velocity has been implemented. Thus a
long and straight path section can be followed with a
high linear velocity whereas a short and curved sec-
tion requires a low velocity value. Likewise, different
criteria for selecting the Look-ahead according to the
velocity and the shape of the path can be found in
(Ollero et al., 1994) and (Ollero et al., 1996).
VEHICLE
Figure 7: Distributed implementation.
5 EXPERIMENTAL RESULTS
The experiments presented in this section have been
performed with ROMEO-4R, an autonomous car-like
vehicle build at the Sevilla University (Ollero et al.,
1999). The navigation control program runs into an
industrial PC-Pentium III under Linux (Debian 2.6).
The control program has been implemented in C++
and attends different concurrent process. Thus an
EKF has been implemented so that GPS and odom-
etry data are combined to obtain a robust pose es-
timation. At the same time, the path tracking algo-
rithm is executed, applying the techniques described
above, being continuously connected whit the plan-
ner program at the auxiliary server. Likewise, the au-
tonomous vehicle also attends different type of prox-
imity sensor (ultrasonics, LIDAR etc) that can be used
for the improvement of the local obstacle avoidance.
This technique is not addressed in the paper. The
auxiliary server is implemented in a laptop computer,
with a 1.8 Ghz AMD processor under Windows XP.
INTEGRATED PATH PLANNING AND TRACKING FOR AUTONOMOUS CAR-LIKE VEHICLES MANEUVERING
461
The planner and all the services running in the aux-
iliary server have been implemented in Java. Addi-
tionally, a connection with an external wireless sen-
sor network has been also developed (Gomez-Bravo
et al., 2007).
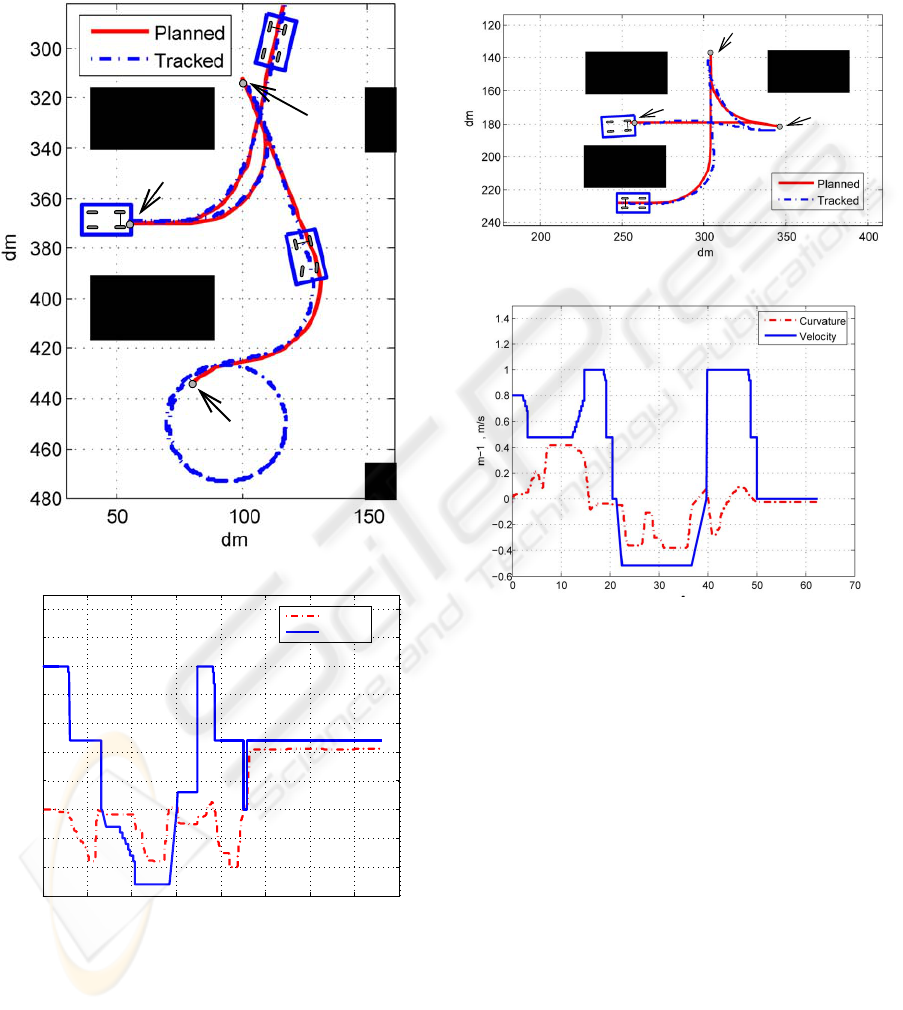
Inversor
Inversor
End of the path
a)
0 20 40 60 80 100 120 140 160
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
s
m−1 , m/s
Curvature
Velocity
b)
Figure 8: Experiment 1: a) Vehicle trajectory and b) Vehicle
velocity and curvature.
Fig. 8 a) shows an experiment in which the path
presents three sections and two inversors. In this ex-
periment the vehicle fell trapped at the end of the path,
it was specially configured in other to illustrate this
type of situation. Fig. 8 b) presents the evolution of
the velocity and curvature. Note that the velocity kept
constant value as the vehicle navigated around the in-
versor and the curvature got the maximum value that
represents the minimum curvature radius.
Inversor
Inversor
End of the path
a)
s
b)
Figure 9: Experiment 2: a) Vehicle trajectory and b) Vehicle
velocity and curvature.
In Fig. 9 a) a new experiment is shown. Due to
the irregularities of the terrain, the vehicle motion is
affected by perturbations that make the vehicle trajec-
tory being different to the reference path. However,
the vehicle finally achieved the final desired config-
uration. Fig. 9 b) presents the evolution of the ve-
locity and the curvature. Observe how, velocity was
decreased along the curved section and was increased
when a straight section was followed.
Finally in Fig. 10 some pictures of ROMEO 4R
performing a maneuver are shown. These pictures
were recorded during the experiment presented in
Fig. 9
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
462

a)
b)
c)
d)
e) f)
Figure 10: ROMEO 4R performing the second maneuver.
6 CONCLUSIONS
This paper presents a new approach for autonomous
car-like vehicles maneuvering. The method allows
navigation of robots with non-holonomic constraints
in cluttered scenarios, providing, when necessary,
continuous paths or complex maneuvers, where the
vehicle has to change the sign of the velocity. This ap-
proach allows to distribute the computational task for
computing the path and tracking the maneuver. Thus,
a new implementation has been proposed so that the
planning and the tracking algorithm exchange contin-
uously data in order to enhance the maneuver perfor-
mance. The method has been validated in real experi-
ment with the autonomous car-like vehicle ROMEO-
4R built at the Sevilla University.
ACKNOWLEDGEMENTS
This work has been supported by the National Spanish
Research Program, project DPI2008-03847, and the
Project URUS funded by the European Commission
under grant IST-045062.
REFERENCES
Amato, N. M. and Wu, Y. (1996). A randomized roadmap
method for path and manipulation planning. IEEE Int.
Conf. Robot. and Autom, pages 113–120.
Barraquand, J. and Latombe, J. C. (1991). Robot motion
planning: A distributed representation approach. Int.
J. Robot, pages 167–194.
Bruce, J. and Veloso, M. (2002). Real-time randomized
path planning for robot navigation. International
Conference on Intelligent Robots and Systems, pages
2383–2388.
Cheng, P., Shen, Z., and LaValle, S. M. (2001). Rrt-
based trajectory design for autonomous automobiles
and spacecraft. Archives of Control Sciences, pages
167–194.
Cuesta, F., Gomez-Bravo, F., and Ollero, A. (2004). Parking
manoeuvres of industrial-like electrical vehicles with
and without trailer. IEEE Trans. on Industrial Elec-
tronics, pages 257–269.
Daily, R. and Bevly, D. (2004). The use of gps for vehicle
stability control. IEEE Trans. on Ind. Electron, pages
270–277.
Gomez-Bravo, F., Cuesta, F., and Ollero, A. (2001). Parallel
and diagonal parking in nonholonomic autonomous
vehicles. Engineering Aplication of Artificial In-
teligence, pages 419–434.
Gomez-Bravo, F., Ollero, A., Cuesta, F., and Lopez, D.
(2007). Rrt-d: A motion planning approach for au-
tonomous vehicles based on wireless sensor network
information. 6th IFAC Symposium on Intelligent Au-
tonomousVehicles, page C.D.
Gomez-Bravo, F., Ollero, A., Cuesta, F., and Lopez, D.
(2008). A new approach for car-like robots manoeu-
vering based on rrt. Robotica, pages 10–14.
Grewal, M. S. and Andrews, A. P. (1993). Kalman Filtering
Theory and Practice. Prentice-Hall.
Latombe, J. C. (1991). Robot Motion Planning. Kluwer
Academic Pulisher.
Laumont, J., Jacobs, P., Taix, M., and Murray, M. (1994).
A motion planner for nonholonomic mobile robots.
IEEE Trans. on Robotics and Autom, pages 577–593.
LaValle, S. M. (1998). Rapidly-exploring random trees: A
new tool for path planning. In TR 98-11.
LaValle, S. M. (2006). Planning algorithms. Cambridge
University Press.
LaValle, S. M. and Kuffner, J. J. (1999). Randomized kino-
dynamic planning. Proc. IEEE Int. Conf. on Robotics
and Automation, pages 473–479.
Ollero, A. (2001). Manipuladores y Robots Moviles. Mar-
combo Boixareu.
Ollero, A., Arrue, B. C., Ferruz, J., Heredia, G., Cuesta, F.,
Lopez-Pichaco, F., and Nogales, C. (1999). Control
and perception componenets for autonomous vehicle
guidance. application to the romeo vehicles. Control
Eng. Practice, pages 1291–1299.
INTEGRATED PATH PLANNING AND TRACKING FOR AUTONOMOUS CAR-LIKE VEHICLES MANEUVERING
463

Ollero, A., Garcia-Cerezo, A., and Martinez, J. (1994).
Fuzzy supervisory path tacking of autonomous vehi-
cles. Control Engineering Practice, pages 313–319.
Ollero, A., Garcia-Cerezo, A., and Martinez, J. (1996). De-
sign of a robust high performance fuzzy path tracker
for autonomous vehicles. Journal of Systems Science,
pages 799–806.
Paromtchik, I. E., Damm, M., and Matioukhina, L. I.
(1998). Autonomous maneuvers of a nonholonomic
vehicle. Intelligent Autonomous Systems. Interna-
tional Scientific Issue, pages 38–45.
Wada, M., Yoon, K. S., and Hashimoto, H. (2003). Devel-
opment of advanced parking assistance system. IEEE
Trans. on Ind. Electron, pages 4–17.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
464
