
MAPPING PARALLEL PROGRAMS INTO
HIERARCHICAL DISTRIBUTED COMPUTER SYSTEMS
Victor G. Khoroshevsky and Mikhail G. Kurnosov
Computer Systems Laboratory, A.V. Rzhanov Institute of Semiconductor Physics, 13 Lavrentyev Ave, Novosibirsk, Russia
Keywords: Parallel programs mapping, Task allocation, Task assignment, MPI, Graph partitioning, Distributed
computer systems, Multicore computer clusters, Parallel computer systems.
Abstract: In most cases modern distributed computer systems (computer clusters and MPP systems) have hierarchical
organization and non-uniform communication channels between elementary machines (computer nodes,
processors or processor cores). Execution time of parallel programs significantly depends on how they map
to computer system (on what elementary machines parallel processes are assigned and what channels for
inter-process communications are used). The general problem of mapping a parallel program into a
distributed computer system is a well known NP-hard problem and several heuristics have been proposed to
approximate its optimal solution. In this paper an algorithm for mapping parallel programs into hierarchical
distributed computer systems based on task graph partitioning is proposed. The software tool for mapping
MPI applications into multicore computer clusters is considered. The quality of this algorithm with the NAS
Parallel Benchmarks is evaluated.
1 INTRODUCTION
A message passing model became widespread for
development of parallel programs for distributed
computer systems (CS; for example,
MPI and PVM). In this model a parallel program
can be presented by a task graph that defines a
pattern of communications between
parallel processes.
Execution time of parallel programs significantly
depends on how they map to CS, on what
elementary machines (EM) parallel processes are
assigned and what channels for inter-process
communications are used.
An objective of optimal mapping of parallel
program into distributed CS is to minimize
communications costs and load disbalance of EMs.
For distributed CSs with static network structures
(hypercube, 3D-torus or mesh) and SMP-clusters
efficient algorithms for mapping parallel programs
are developed (Ahmad, 1997), (Bokhari, 1981),
(Lee, 1989), (Yau, 1993), (Yu, 2006),
(Chen et al. 2006).
Modern distributed CSs are multiarchitectural
(Khoroshevsky, 2005, 2008). Depending on level of
consideration of their functional structures, they can
look both as MISD, and as SIMD, and as MIMD
systems. For such systems hierarchical organization
and non-uniform communication channels between
EMs are characteristic.
A typical number of levels in modern distributed
CSs is vary from 2 up 4 (for example, shared
memory of processor cores, shared memory of
processors, computer nodes interconnect, links
between second stage switches in fat tree
topology etc.).
In most popular MPI libraries (MPICH2 and
OpenMPI) realized the round robin and the linear
algorithms of mapping parallel programs into CSs.
This algorithms do not take into account hierarchical
organization of modern distributed CSs. The round
robin algorithm allocate parallel processes between
N EMs in the follow order: first process allocated on
first EM, second process on second EM, …, process
N on EM N, process N + 1 on process 1 and etc. The
linear algorithm allocates M processes between
first M EMs.
In this paper we consider the problem of optimal
mapping parallel programs into hierarchical
distributed CS (particularly multicore computer
clusters).
A heuristic algorithm of mapping parallel
programs is proposed. A software tool for
optimization of mapping MPI programs to multicore
123
Khoroshevsky V. and Kurnosov M. (2009).
MAPPING PARALLEL PROGRAMS INTO HIERARCHICAL DISTRIBUTED COMPUTER SYSTEMS.
In Proceedings of the 4th International Conference on Software and Data Technologies, pages 123-128
DOI: 10.5220/0002240601230128
Copyright
c
SciTePress

computer clusters is developed. A results of natural
experiments on mapping parallel MPI-programs
from High-Performance LINPACK (HPL) and NAS
Parallel Benchmarks into multicore computer cluster
are presented.
The rest of the paper is organized as follows:
Section 2 describes some related works. Section 3
gives a description of the problem, and Section 4
describes the algorithm. Section 5 outlines and
evaluates the experimental tests. Finally, we
summarize our work in Section 6.
2 RELATED WORK
The problem of mapping parallel programs to CS
has been well described. There have been many
distinct categories of research, each having a
different focus. A large part of the work (Kielmann
et al. 1999), (Almasi et al. 2005), (Faraj et al. 2005)
has concentrated on working with communication
network topology graph only while still ignoring
task graph structure. In the next category,
researchers have worked on communication-
sensitive clustering while still ignoring any network
topology considerations. The main objective here is
the partitioning of task graph into balanced groups
while reducing inter-partition communication (Lee,
Kim & Park, 1990), (Lopez-Benitez, Djomehri &
Biswas, 2001). The graph partitioning algorithm
(Karypis, Kumar, 1999), (Hendrickson, Leland,
1995) is widely used in the MPI performance
optimization (Träff, 2002). It requires the task graph
to describe the communication behavior of the
program, which could be derived from trace or user
input (Chen et al. 2006).
In this paper we developed a heuristic algorithm
for mapping parallel programs into hierarchical
distributed CSs. The algorithm for working at both a
task graph and the information about communication
network hierarchy.
3 THE MAPPING PROBLEM
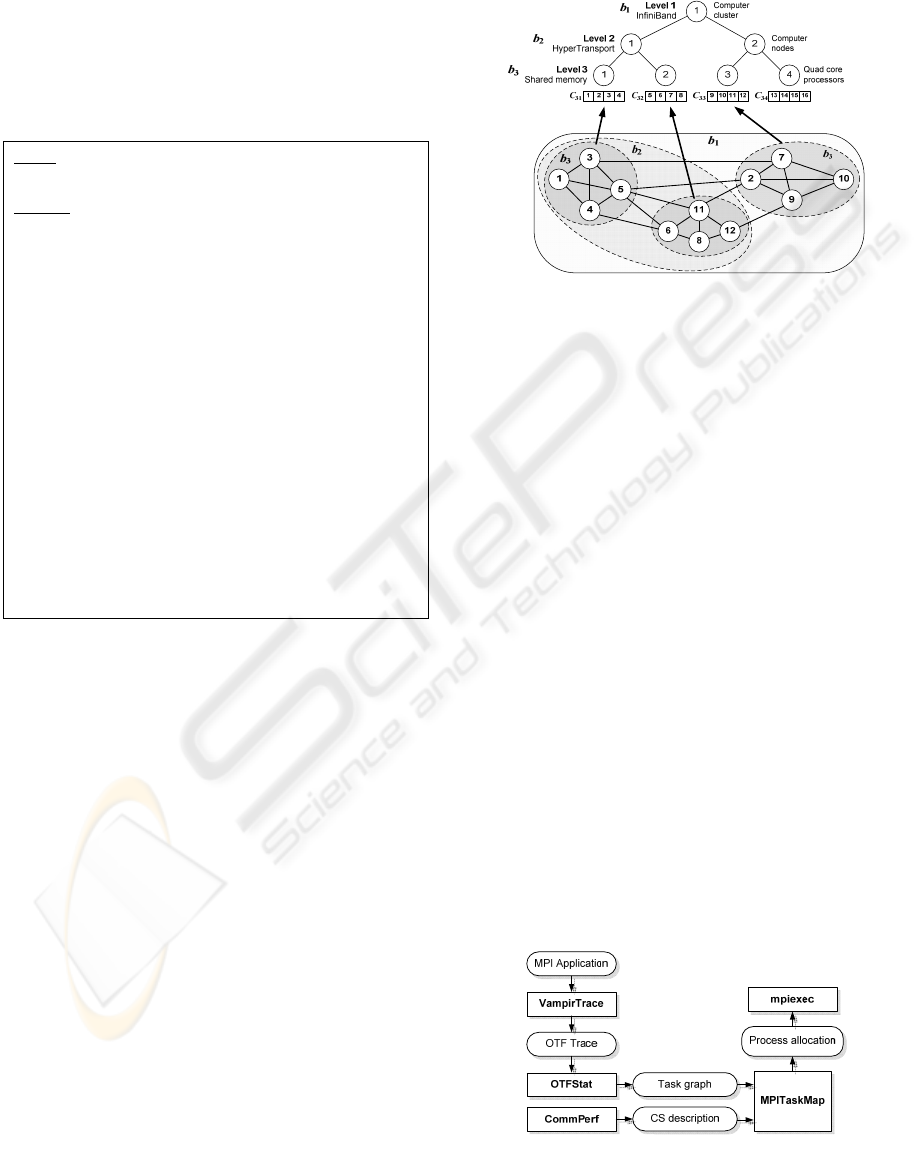
Let’s hierarchical distributed CS has N
homogeneous elementary machines and a
communication network with hierarchical
organization. Such a communication network can be
described by a tree with L levels. Each level of
system is formed by own type of functional modules
(for example, telecommunication racks, computer
nodes, processors etc.) which interconnected via
communication channels of current level. In Figure
1 an example of hierarchical CS, three nodes
computer cluster, is shown.
For CS description following denotations are
accepted: n
l
– is a number of elements placed at
level l ∈ {1, 2, …, L}; n
lk
– is a number of children
of element k ∈ {1, 2, …, n
l
} at level l; g(l, k
1
, k
2
) – is
a number of the element level, which is the lowest
common ancestor for elements k
1
, k
2
∈ {1, 2, …, n
l
};
b
l
– is a bandwidth of communication channels at
level l ([
l
b ] = bit/sec.); C
lk
– is a set of elementary
machines belonging to the descendants of element k
at level l; c
lk
= |C
lk
|; C
11
= C; C = {1, 2, …, N}.
Figure 1: Cluster: 3 nodes 2 x AMD Opteron 275
(N = 12; L = 3; n
23
= 2; C
23
= {9, 10, 11, 12};
g(3, 3, 4) = 2; z(1, 7) = 1).
A message-passing parallel program is
represented by a weight undirected task graph
G = (V, E). The vertices V = {1, 2, …, M}
correspond to parallel processes and the edges
E ⊂ V×V represent communications between the
processes. Weight d
ij
of edge (i, j) ∈ E is a number
of bytes transmitted between processes i and j
during program execution ([d
ij
] = bytes). We assume
that M ≤ N.
3.1 Estimation of Parallel Program
Execution Time
Formally, the problem of optimal mapping of
parallel program into distributed hierarchical CS is
to find injective function f: V → C, which maps
parallel processes to EMs. It is required to find x
ij
:
X = {x
ij
: I ∈ V, j ∈ C},
⎩
⎨
⎧
=
=
else.0
;)( if,1 jif
x
ij
We use the expected execution time
t
of parallel
program as an optimization criterion. The execution
time t of parallel program is defined as maximum
from its processes execution times.
The execution time t
i
of parallel process I ∈ V
includes a time of computations and a time of
communications with adjacent processes. We take
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
124

into account the communication costs only due to
the homogeneity of EMs. Then
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⋅⋅==
∑∑∑
===
∈
∈
M
j
N
p
N
q
jqip
Vi
Vi
i
qpjitxxtt
111
),,,(max}max{
,
where t(i, j, p, q) = d
ij
/ b
z(p, q)
is a time of
communications between processes i, j ∈ V, which
are allocated to EMs p and q, correspondingly (p, q
∈ C). The function z(p, q) sets up a correspondence
between machines p and q, and the number of
communication network level through which they
interact. In Figure 1 function z(1, 7) = 1, because the
processor cores 1 and 7 belong to different computer
nodes which interact via InfiniBand network.
3.2 Optimization Problem
Let’s formulate the problem of optimal mapping of
parallel program into hierarchical distributed CS
with the injectivity of the function f taken into
account:
)(
111
mi
n
),,,(max)(
ij
x
M
j
N
p
N
q
jqip
Vi
qpjitxxXT →
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⋅⋅=
∑∑∑
===
∈
(1)
sub
j
ect to:
∑
=
=
N
j
ij
x
1
1
,
Mi ,,2,1 K= ,
(2)
∑
=
≤
M
i
ij
x
1
1
,
Nj ,,2,1 K=
,
(3)
}1,0{∈
ij
x
, Vi ∈ , Cj ∈ .
(4)
The constraints (2), (4) ensure that each process
allocated on one EM, constraints (3) guarantee that
each EM execute one process.
4 THE MAPPING ALGORITHM
The problem (1) – (4) is a discrete optimization
problem. The heuristic algorithm TMMGP (Task
Map Multilevel Graph Partitioning) for solving the
problem is developed. The algorithm based on
multilevel procedure of k-way graph partitioning.
Let’s formulate the last problem.
4.1 Graph Partitioning Problem
The k-way graph partitioning problem is defined as
follows: given a graph G’ = (V’, E’) with V
′
= {1, 2,
…, n}, partition V’ into k disjoint subsets
k
VVV
′
′
′
,,,
21
K such that
∅
=
′
∩∩
′
∩
′
k
VVV ...
21
,
VVVV
k
′
=
′
∪∪
′
∪
′
...
21
and the maximal sum of the
edge-weights incident to any subset is minimized.
Let
},,:),{(),( jiVvVuEvujiE
ji
≠
′
∈
′
∈
′
∈
=
′
denote a set of edges whose incident vertices belong
to subsets
i
V
′
and
j
V
′
. The function
c(u, v, i, j) = w(u, v)W(i, j)
is an edge-weight which incident to different
subsets; ),( vuw is a weight of the edge (u, v) ∈ E’,
W(i, j) is an additional weight for edges incident to
subsets i and j.
The formal problem statement of optimal k-way
graph partitioning with constraints for
i
V
′
taken into
account is presented below.
),...,,(
1),(),(
,1
21
21
min),,,(max
),...,,(
k
VVV
k
jjiEvu
ki
k
jivuc
VVVF
′′′
=
′
∈
=
→
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
′
′
′
∑∑
(5)
sub
j
ect to:
∅=
′
∩
∩
′
∩
′
k
VVV ...
21
,
(6)
VVVV
k
′
=
′
∪∪
′
∪
′
...
21
,
(7)
0|| >
′
i
V , ki ,...,2,1
=
,
(8)
sV
i
≤
′
|| ,
ki ,...,2,1
=
.
(9)
4.2 The Mapping Algorithm
The mapping algorithm TMMGP consists of the
following steps.
1) For the task graph G = (V, E) is solved the
problem (5) – (9) – the graph is partitioned into
k = [(M – 1) / c
L1
] + 1 disjoint subsets
k
VVV
′
′
′
,...,,
21
with values: s = c
L1
, c(u, v, i, j) = d
uv
/ b
g(L, i, j)
(see
Section 3).
2) The mapping f : V → C is built as follows.
The processes from subset
i
V
′
is allocated to EMs
from set C
Li
.
The multilevel heuristic algorithms for graph
partitioning (Hendrickson, Leland, 1995), (Karypis,
MAPPING PARALLEL PROGRAMS INTO HIERARCHICAL DISTRIBUTED COMPUTER SYSTEMS
125
Kumar, 1999) became widely spread in practice.
Such algorithms allow us to find approximate
solutions for problem (5) – (9) in an acceptable time.
In this paper at step 1 we used the multilevel
graph partitioning algorithm introduced in (Karypis,
Kumar, 1999). The complexity of the algorithm is
O(|E|log
2
k).
In Figure 2 a pseudocode of the TMMGP
algorithm is shown.
Input
: a task graph G = (V, E); a CS description:
N, L, n
l
, n
lk
, C, C
lk
, c
lk
; M’.
Output: mapping x[j, c], x[j, c] = 1 if process j
allocated to EM c, and x[j, c] = 0
otherwise.
1
k
← [(M – 1) / c
L1
] + 1
2
s
← c
L1
3
M ← log
2
(M / M’) + 1
4
for i ← 1 to m do
5
G
i
← CoarseGraph(G
i
–
1
)
6
end for
7
P
m
← RecursiveBisection(G
m
, k, s)
8
for i ← m to 1 do
9
P
i
–
1
← ProjectPartition(G
i
–
1
, P
i
)
10
P
i
–
1
← RefinePartition(G
i
–
1
, P
i
–
1
)
11
end for
12
for j ← 1 to M do
13
c ← Dequeue(C[P
0
,
j
])
14
x[j, c] ← 1
15
end for
Figure 2: A pseudocode of the TMMGP algorithm.
In the lines 4 – 6 a sequence of smaller graphs
G
1
, G
2
, …, G
m
is built. The function CoarseGraph
coarse the graph G
i
to smaller graph G
i + 1
by
stochastic algorithm Heavy Edge Matching
(Karypis, Kumar, 1998), |V
i +1
| ≈ |V
i
| / 2, G
0
= G. The
function RecursiveBisection realize the recursive
bisection algorithm LND (Schloegel et. al., 2003) of
small graph G
m
into k subsets with constrain
sV
i
≤
′
|| .The function ProjectPartition map the
partition P
i
of the graph G
i
to the graph G
i – 1
. The
function RefinePartition implements the FM
heuristic algorithm of partition refinement (Fiduccia,
Mattheyses, 1982). In the line 13 C[k] is a queue of
EMs from C
Lk
set and P
0,j
is a number of subset of
partition P
0
which process j belong to.
The parameter M’ is a number of vertices in
graph G
m
. The value of M’ chooses such that
recursive bisection implements fast (usually on
practice M’ ≤ 10⋅k).
A computational complexity of the TMMGP
algorithm is O(|E|log
2
k + M).
The example of task graph mapping into
computer cluster by the TMMGP algorithm is shown
in Figure 3.
1
V
′
2
V
′
3
V
′
Figure 3: Example of mapping task graph by TMMGP
algorithm (N = 16; L = 3; M = 12; b
1
= 2 GBps; b
2
= 6
GBps; b
3
= 8 GBps).
5 EXPERIMENTS
The software tool MPITaskMap for optimization of
mapping MPI programs into multicore computer
clusters is created.
5.1 Mapping Tools
The MPITaskMap tool consists of the following
three components (see Figure 4):
1) OTFStat is the tool for analyzing traces of
MPI programs in Open Trace Format (OTF)
(Knüpfer et al. 2006) and building task graphs.
2) CommPerf is the tool for benchmarking
performance of communication channels between
processor cores of computer cluster.
3) MPITaskMap is the tool for mapping MPI
programs into processor cores. This component gets
MPI program’s task graph and system description as
an input and builds a script for launching the
program with optimized mapping.
All components are implemented in ANSI C for
GNU/Linux operation system.
Figure 4: Process of the mapping MPI applications.
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
126
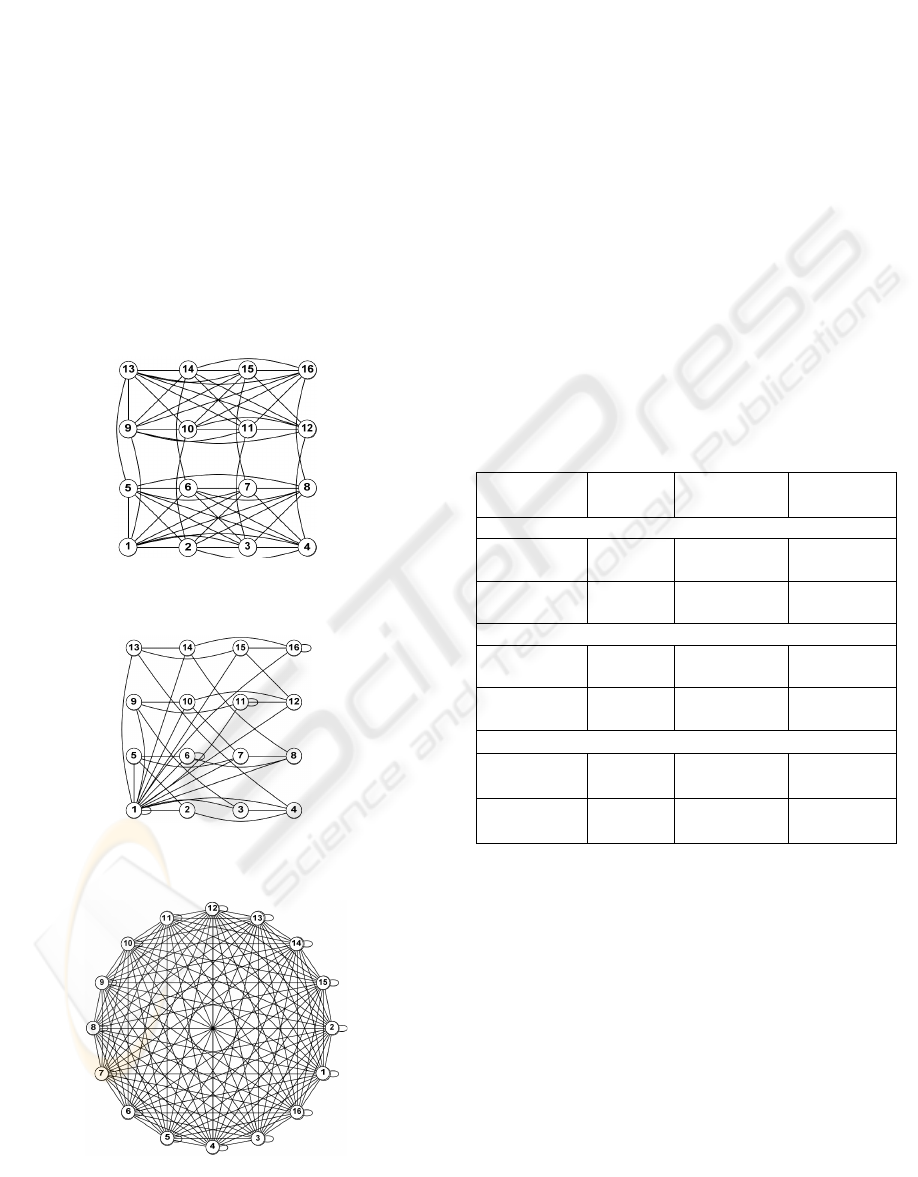
5.2 Experiment Organization
We used MPI programs from packages NAS Parallel
Benchmarks (NPB) and HPL in our experiments.
The structures of task graphs of HPL, Conjugate
Gradient (CG) and NPB Multigrid (MG)
benchmarks are shown in Figure 5, 6 and 7,
correspondingly. All graphs are built by OTFStat
tool.
Computers clusters of the following
configurations are used in experiments:
– cluster Xeon16: 4 nodes (2 x Intel Xeon 5150)
interconnected via Gigabit/Fast Ethernet networks;
– cluster Opteron10: 5 nodes (2 x AMD Opteron
248) interconnected via Gigabit/Fast Ethernet
networks.
Figure 5: HPL benchmark task graph (16 processes,
PMAP=0, BCAST=5).
Figure 6: NPB Conjugate Gradient task graph (16
processes, CLASS B).
Figure 7: NPB Multigrid task graph (16 processes,
CLASS B).
5.3 Results
The execution times of MPI benchmarks with
mapping into cluster Xeon16 by round robin
algorithm (T(X
RR
), default algorithm of mpiexec
tool) and by TMMGP algorithm (T(X
TMMGP
)) are
presented in Table 1.
The communication network of Xeon16 consists
of two levels. The first level is a Gigabit / Fast
Ethernet network between nodes, the second level is
a shared memory of processors inside nodes.
The working time of algorithm TMMGP on Intel
Core 2 Duo 2.13GHz processor did not exceed
5⋅10
3
sec. for all benchmarks.
As we can see from results, the quality of
mapping significantly depends on a task graph
structure. The optimization of mapping of parallel
programs with non-uniform task graphs (for
example, NPB CG or HPL) can considerably reduce
its execution time.
Table 1: Experimental results.
Cluster
interconnect
T(X
RR
),
sec.
T(X
TMMGP
),
sec.
T(X
RR
) /
T(X
TMMG
P
)
High Performance Linpack
Fast
Ethernet
1108,69 911,81 1,22
Gigabit
Ethernet
263,15 231,72 1,14
NPB Conjugate Gradient
Fast
Ethernet
726,02 400,36 1,81
Gigabit
Ethernet
97,56 42,05 2,32
NPB Multigrid
Fast
Ethernet
23,94 23,90 1,00
Gigabit
Ethernet
4,06 4,03 1,00
It is necessary to notice, what a facilities on
optimization of mapping parallel programs with full
task graphs (for example, NPB Multigrid)
sufficiently limited. Also, the quality of mapping
depends on difference in performance of
communication channels on several levels.
6 CONCLUSIONS
In this paper the problem of optimal mapping
parallel MPI programs into multicore computer
clusters is considered. The heuristic algorithm
TMMGP of mapping parallel programs is proposed.
MAPPING PARALLEL PROGRAMS INTO HIERARCHICAL DISTRIBUTED COMPUTER SYSTEMS
127

The algorithm working with both the task graph and
the information about communication network
hierarchy. Software tool for optimization of mapping
MPI programs is developed. Examples of mapping
parallel programs from NAS Parallel Benchmarks
are presented.
The feature work is to integrate the mapping
algorithm into resource management systems.
ACKNOWLEDGEMENTS
This work was supported by Russian foundation for
basic research under grants 08-07-00018, 07-07-
00142, 08-07-00022, 08-08-00300, 09-07-90403 and
grant Support of Russian Leading Scientific School
no. 2121.2008.9.
REFERENCES
Ahmad, I., 1997. A Parallel Algorithm for Optimal Task
Assignment in Distributed Systems. In Proceedings of
the Advances in Parallel and Distributed Computing
Conference, pp. 284.
Bokhari, S. H., 1981. On the mapping problem. IEEE
Transactions on Computers, Vol. 30, №3,
pp. 207-214.
Lee, C., 1989. On the mapping problem using simulated
annealing. In Proceedings of Computers and
Communications, pp. 40-44.
Yau, S., 1993. A task allocation algorithm for distributed
computing systems. In Proceedings of Computer
Software and Applications Conference, pp. 336-342.
Yu, H., 2006. Topology Mapping for Blue Gene/L
Supercomputer. In Proceedings of ACM/IEEE
Conference Supercomputing, pp. 52.
Kielmann, T., Hofman, R.F.H., Bal, H.E., Plaat, A. and
Bhoedjang, R., 1999. MagPIe: MPI’s collective
communication operations for clustered wide area
systems. In ACM SIG-PLAN Notices 34, pp. 131-140.
Almási, G., Heidelberger, P., Archer, C. J., Martorell, X.,
Erway, C. C., Moreira, J. E., Steinmacher-Burow, B.,
and Zheng, Y., 2005. Optimization of MPI collective
communication on BlueGene/L systems. In
Proceedings of the 19th Annual international
Conference on Supercomputing, pp. 253-262.
Faraj, A. and Yuan, X., 2005. Automatic generation and
tuning of MPI collective communication routines. In
Proceedings of the 19th Annual international
Conference on Supercomputing, Cambridge,
Massachusetts, pp. 393 – 402.
Lee, C. H., Kim, M., and Park, C. I., 1990. An efficient K-
way graph partitioning algorithm for task allocation in
parallel computing systems. In Proceedings of the
First international Conference on Systems integration
on Systems integration, IEEE Press, pp. 748-751.
Lopez-Benitez, N., Djomehri, M. J., and Biswas, R., 2001.
Task Assignment Heuristics for Distributed CFD
Applications. In Proceedings of the 2001 international
Conference on Parallel Processing Workshop. IEEE
Press., p. 128.
Karypis, G., Kumar, V., 1999. A fast and high quality
multilevel scheme for partitioning irregular graphs. In
SIAM Journal on Scientific Computing, Vol. 20, No. 1,
pp. 359-392.
Hendrickson, B., Leland, R., 1995. A multilevel algorithm
for partitioning graphs. In Proceedings of the
ACM/IEEE conference on Supercomputing.
Träff, J. L., 2002. Implementing the MPI process topology
mechanism. In Proceedings of the 2002 ACM/IEEE
Conference on Supercomputing. IEEE Press.,
pp. 1 - 14.
Chen, H., Chen, W., Huang, J., Robert, B., and Kuhn, H.,
2006. MPIPP: an automatic profile-guided parallel
process placement toolset for SMP clusters and
multiclusters. In Proceedings of the 20th Annual
international Conference on Supercomputing,
pp. 353-360.
Khoroshevsky, V.G., 2008. Computer Systems
Architecture, MGTU, Moscow [in Russian].
Karypis, G., 1998. Multilevel k-way partitioning scheme
for irregular graphs. In Journal of Parallel and
Distributed computing, Vol. 48, pp. 96-129.
Schloegel, K., G. Karypis, V. Kumar, 2003. Graph
partitioning for high-performance scientific
simulations. In Sourcebook of parallel computing,
pp. 491-541.
Fiduccia, C. M., R. M. Mattheyses, 1982. A linear-time
heuristic for improving network partitions. In Proc. of
conference “Design Automation”, pp. 175-181.
Khoroshevsky, V.G., Mamoilenko, S.N. Maidanov, Y.S.,
Sedelnikov, M.S., 2005. Space-distributed multicluster
computer system with multiprogramme regimes
supporting. In Proceedings of the Second IASTED
International Multi-Conference on Automation,
Control and Information Technology. Software Engi-
neering, ASTA Press.
Khoroshevsky, V.G., Mamoilenko, S.N., Kurnosov, M.G.,
Medvedeva, N.A., 2006. Space-Distributed Multi-
Cluster Computer System for Training in Parallel
Computational Technologies. In Proc. of 7th
International Workshop and Tutorials on Electron
Devices and Materials, pp. 218-219.
Knüpfer, A., Brendel, R., Brunst, H., Mix, H., Nagel,
W.E., 2006. Introducing the Open Trace Format
(OTF). In Vassil N. Alexandrov, Geert Dick van
Albada, Peter M. A. Sloot, Jack Dongarra (Eds):
Computational Science - ICCS 2006: 6th International
Conference, pp. 526-533.
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
128
