
DYNAMIC CONTROL OF NETWORK PROTOCOLS
A New Vision for Future Self-organising Networks
Sven Tomforde, Emre Cakar and J
¨
org H
¨
ahner
Institute of Systems Engineering, Leibniz Universit
¨
at Hannover, Appelstr. 4, 30167 Hannover, Germany
Keywords:
Organic Computing, Data communication network, Protocol, Parameter, Optimisation.
Abstract:
In recent years communication protocols have shown an increasing complexity, in particular in terms of the
number of variable parameters. Data communication networks like, e. g. , the Internet reach the limits of
their extensibility which leads to initiatives coping with the future of the Internet and data communication in
general. A first step towards creating a sustainable solution without exchanging the whole system is to make
the static character of network protocols more flexible. An adaptive behaviour of nodes within a network and
an autonomous, self-organising concept for their control strategies leads to a possible increase in performance
accompanied by an increase of extensibility. This paper presents a new vision of how to establish these
new control strategies mostly independent of the particular protocol by using the concepts of Organic and
Autonomic Computing. We introduce an adaptive and automated network control system for the dynamic and
self-organised control of protocol parameters. This system consists of two sub-systems: an on-line adaptation
mechanism and an off-line learning component. The current status is introduced in combination with the
definition of further challenges and fields of research.
1 INTRODUCTION
Recent years were characterised by a dramatical
growth of communication need and increase of traf-
fic over data communication networks. In combi-
nation with the ascending number of protocols and
their varying configuration possibilities (configura-
tion space) the complexity of the control task at each
node in the network is growing. Based on this ob-
servation, more and more often the question arises
whether the current structure of the network (in partic-
ular the Internet) will be able to cope with the increas-
ing demand (cf. e. g. (Handley, 2006)). This leads to
a new vision for the future of the Internet ((Siekkinen
et al., 2007)).
The number of researchers formulating the need to
exchange the complete set of techniques (e. g. proto-
cols, structure, etc.) is increasing steadily. One major
problem focused here is that the existing protocols are
designed as static solutions. Although the situation at
particular nodes within the communication networks
(in terms of e. g. resource usage, available bandwidth,
currently known neighbours, etc.) changes over time,
the configuration is typically not adapted to the cur-
rent requirements. A possibility to solve this prob-
lem by keeping downward compatibility (this means
cooperation of static and dynamic solutions) is pre-
sented within this paper.
Based on the approaches of Organic Computing
(OC - cf. (Schmeck, 2005)) and Autonomic Comput-
ing (AC - cf. (Kephart and Chess, 2003)) an adaptive
network control system is introduced which aims at
coping with the large configuration space. The sys-
tem is locally organised, adaptive, and has learning
abilities guaranteeing the best possible performance
for each node.
This paper presents an adaptive and automated
system for the dynamic and self-organised control of
network protocol parameters (e. g. values for time-
outs, maximum number of re-transmissions, number
of open connections, etc.). Section 2 focuses on
a short overview of already introduced approaches
to optimise network settings and concludes with the
statement that no system with the required properties
exists yet. In Section 3 the architecture and general
approach for the proposed system are described com-
bined with details on the technical realisation. After-
wards, Section 4 defines the challenges for the fur-
ther development and the research to be done until a
real-time operation can be applied. Finally, Section 5
concludes the vision for dynamic network control.
285
Tomforde S., Cakar E. and Hähner J. (2009).
DYNAMIC CONTROL OF NETWORK PROTOCOLS - A New Vision for Future Self-organising Networks.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 285-290
DOI: 10.5220/0002243302850290
Copyright
c
SciTePress

2 STATE OF THE ART
The dynamic selection of network protocol parame-
ter settings depends on the situation-based generation
of these settings. Therefore, the task can be divided
into two different subtasks: the off-line optimisation
of parameter settings for a given (observed) situation
and the on-line adaptation of the network controller
settings with a suitable parameter set.
The optimisation of parameter settings deals with
the problem to determine a set of parameters for a
given protocol that is as close to the optimum as possi-
ble. The task is characterised by the required amount
of time and the quality of the solution to be found.
In this context off-line means evaluating new possible
settings using simulation and thus without interfering
with the live-system.
There are several examples where authors opti-
mised the settings of their particular protocols, but
their intention has been to optimise a specific proto-
col and not to create a generic system. Considering
the techniques used in our system, the approach of
Montana and Redi is connected as they also use an
Evolutionary Algorithm (EA) to optimise a full cus-
tom communication protocol for military MANETs
(Montana and Redi, 2005). A similar optimisation of
a protocol (for underwater communications) using an
EA is described by S
¨
ozer et al. (S
¨
ozer et al., 2000).
Turgut et al. discuss the usage of a Genetic Algo-
rithm to optimise their MANET-based clustering pro-
tocol in (Turgut et al., 2002). They all compare their
achieved results to a manual optimisation. In contrast
to the network control system presented in this paper
the approaches are specific to the particular protocols,
but do not aim at providing a generic system which is
adaptable to different protocol types.
Due to the time-intensive process of generat-
ing optimal parameter sets an on-line usage in live-
systems is not applicable. Hence, such a solution
has to somehow combine the strengths of optimisa-
tion techniques with approaches to immediately react
on an observed stimulus. Although research commu-
nities are aware of the demand and it already has been
part of the vision of initiatives (Kephart and Chess,
2003) a solution has not been presented yet.
One approach towards a possible solution has
been described by Ye and Kalyanaraman (Ye and
Kalyanaraman, 2001). They introduced an adaptive
random search algorithm, which tries to combine the
stochastic advantages of pure random search algo-
rithms with threshold-based knowledge about extend-
ing the search. Their approach is based on the initial
system as presented in (Ye et al., 2001). In contrast to
our approach, Ye et al. propose a centralised system
that tackles the optimisation task for each node. To
allow for such a division of work between a central
server and the particular network nodes they have to
deal with problems like e. g. bandwidth usage, single
point of failure, or local knowledge accessible from
server-side.
3 SYSTEM
The motivation to develop a dynamically adapting
system has been formulated before (cf. AC (Kephart
and Chess, 2003) or Autonomic Networking (Jen-
nings et al., 2007)), a proof of concept is still miss-
ing. The system presented in this paper is a first step
towards a possible realisation. Based upon our archi-
tecture as pictured in Fig. 1 and initially presented
in (Tomforde et al., 2009) the responsibilities of pa-
rameter set generation and on-line adaptation of the
control system are assigned to different layers. One
component (Layer 2) evolves new parameter sets not
being restricted by real-time requirements for time
and computation power. The other part reacts on
changing stimuli (observed situation). This division
of functionalities leads to the possibility that for an
observed situation no matching optimised parameter
set is available. In this case a covering mechanism
has to cope with the situation which chooses the best
possible control and adaptation strategy.
Technically, the architecture is realised by two
connected techniques. As described in e. g. (Schmid
et al., 2006), a combination of evolution and learn-
ing seems to be a promising solution to realise dy-
namic system-adaptations. Based on this assumption,
for the off-line part an Evolutionary Algorithm (EA)
is used in combination with a standard network simu-
lation tool. The on-line learning mechanism is based
on a modified version of Wilson’s Learning Classifier
System XCS (Wilson, 1995).
Within this Section the goals of the system are de-
fined, followed by a short introduction of the basic
concepts. The main part is dealing with the architec-
ture and the current status.
3.1 Goal Definition
The network control system as presented in this pa-
per aims at increasing the performance of data com-
munication. It allows for the dynamic adaptation of
network protocols to a continuously changing envi-
ronment. Based on the initially introduced concept
(Tomforde et al., 2009), the system requires organic
(in terms of OC) characteristics – a decentral, self-
organised approach leads to a stable, reliable con-
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
286
trol, the system is able to learn and optimise its be-
haviour autonomously. The network control system
is generic, which means the controlled network proto-
col client can be exchanged. It supports a large set of
different protocol types (Peer-to-Peer, mobile ad-hoc,
wire-based, sensor, etc.) and protocols (e. g. BitTor-
rent (Cohen, 2003), Hyper-Gossiping (Khelil et al.,
2007), etc.). If possible, the autonomous network
control systems can collaborate and fullfill system-
wide goals by using local interactions. The goal defi-
nition has some similarities with the manifest of Au-
tonomic Computing (Kephart and Chess, 2003) and
the Autonomic Management of Networks approach
as presented in (Jennings et al., 2007). In contrast to
the network-wide approach (which is unfeasible for
large networks like the Internet), we assume that a lo-
cally organised solution based on local rules and local
interactions will converge to a system-wide optimisa-
tion in most of the cases and therefore does not need
global knowledge and global control.
3.2 Basic Concepts
The architecture is based on two already known ap-
proaches: the Generic Observer/Controller Architec-
ture (Richter et al., 2006) and the 2-layered Archi-
tecture of the Organic Traffic Control (OTC) Sys-
tem (Prothmann et al., 2008). The generic archi-
tecture describes an approach, where a decentralised
system (System under Observation/Control (SuOC))
is wrapped with an additional surveillance and feed-
back mechanism. Sensors and actuators are used to
monitor and control the SuOC by establishing a con-
trol loop. This control loop observes the behaviour of
the SuOC through sensors, compares the results with
expected behaviour and the current goals of the sys-
tem, decides what action is necessary and controls the
SuOC with the best known action through actuators.
Additionally, a memory function keeps track of his-
torical situations and control actions to be able to op-
timise the behaviour from existing knowledge.
The architecture of the OTC system is based on
this approach. The realisation of a real-world sce-
nario (control of traffic lights at urban intersections)
leads to some restrictions – the main aspect is that the
system has to use only parameter sets with guaran-
teed performance. Therefore, the situation-dependent
creation of new parameter sets has been assigned to a
new layer within the architecture where a simulation-
based approach is performed off-line. This concept
can be also found in the network control system, but
the different domain leads to some modifications and
changes, which will be explained in the remainder of
this section.
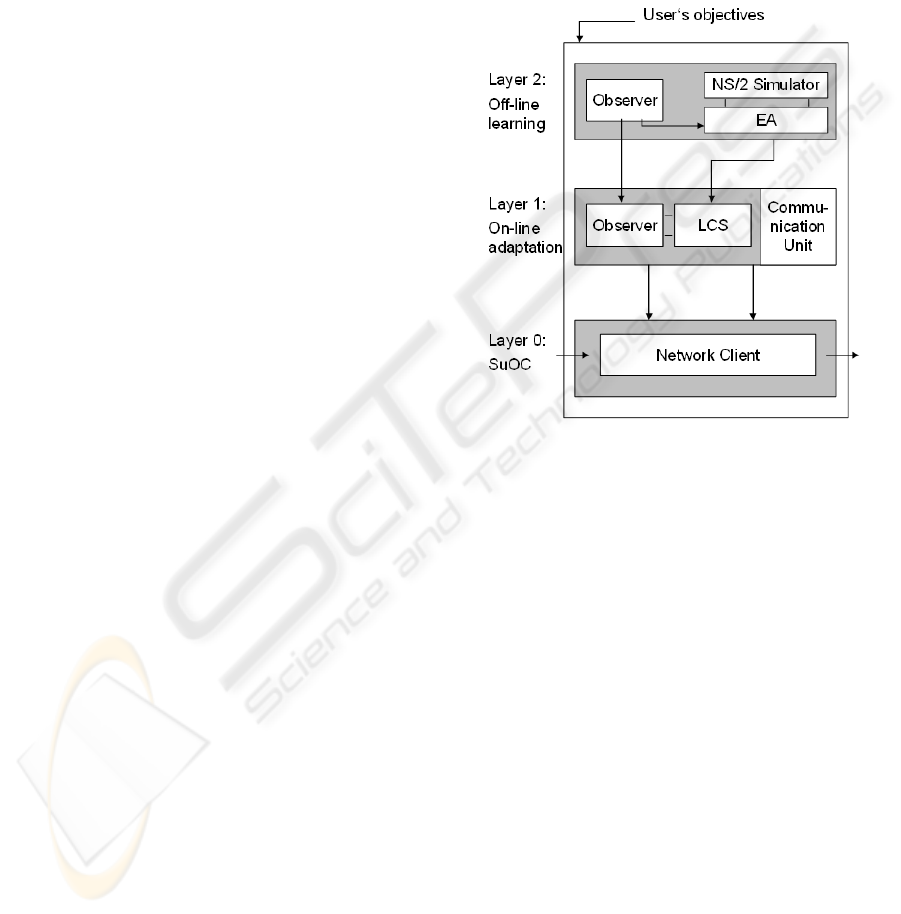
3.3 Architecture
Similar to the 2-layered Architecture of the Organic
Traffic Control (OTC) System (Prothmann et al.,
2008) our architecture consists of three parts: the
SuOC at Layer 0, an on-line adaptation mechanism
at Layer 1, and an off-line learning component at
Layer 2 (see Fig. 1). All three layers will be presented
in the following.
Figure 1: System architecture.
Layer 0: System under Observation and Control
The SuOC is a parametrisable Network Controller.
Due to the generic concept of the proposed system
it is not restricted to a particular set of protocols –
the only restriction applied is that it has to provide a
set of variable parameters and a local quality criterion
(e. g. duration of a download in Peer-to-Peer systems
or a weighted trade-off between energy consumption
and broadcast-covering for MANETs) for the perfor-
mance measurement. This means, protocols on all
layers (media access to application) can be controlled
in the same way as e. g. wire-based protocols or mo-
bile ad hoc networks. A good setup of the variable
parameters that match the current condition at the net-
work node has an important influence on the resulting
performance for these systems. In the architecture,
the parameter setup is optimised on-line by the O/C
component in Layer 1.
Layer 1: On-line Adaptation
The Layer 1 component can be divided into two dif-
ferent parts: an Observer and a Controller. The Ob-
DYNAMIC CONTROL OF NETWORK PROTOCOLS - A New Vision for Future Self-organising Networks
287

server is responsible for monitoring the situation at a
particular node. It measures those attributes having
influence on the selection of appropriate parameters
for the control strategy. This selection depends on
the specific controlled protocol and typically contains
attributes like buffer sizes, delay times, etc. Addi-
tionally, protocol-specific parameters like e. g. num-
ber of nodes in sending distance for MANET proto-
cols or available system resources like CPU, upload-
bandwidth, download-bandwidth, etc. for P2P pro-
tocols can be taken into account. Afterwards, these
values are aggregated to an abstract situation descrip-
tion realised as an n-dimensional vector with n equal
to the number of observed values.
The main part of the Controller is a Learning Clas-
sifier System, which is based on Wilson’s XCS as in-
troduced in (Wilson, 1995). The LCS maps the aggre-
gated input-information from the Observer to a rule
base of possible actions, the process is realised in ac-
cordance with Wilson’s approach. The basic change
in concept is that our LCS version is not able to cre-
ate new rules as this process can lead to unwanted
behaviour (random rule generation). This leads to
the problem that the system might not have a match-
ing rule for the currently observed situation, although
the system detects the demand to adapt the network
client. Therefore, a covering mechanism is needed,
which chooses the best possible action.
This covering is realised based on the assumption
that a classifier whose condition part is located close
to the current situation description – although it does
not match it – is better than any other one existing
within the rule set. Due to this assumption a covering
process is executed which selects the ”nearest” classi-
fier in terms of the Euclidian Distance calculated for
the n dimensional vectors (equal to the situation de-
scription) and using the centroids of the intervals used
for each interval predicate. This classifier is copied,
its condition part is adapted to the current situation
description (using a standard interval size around the
given situation), and it is added to the rule set. Based
on this simple process we ensure to only use tested ac-
tions and we also ensure that at least one rule is con-
tained in the match set. Further details on the process
can be found in (Tomforde et al., 2009).
Layer 2: Off-line Learning
The existing set of classifiers and consequently the set
of existing parameter sets has to be extended for sit-
uations where no classifier matches. This means, the
system has to be able to autonomously learn param-
eter sets for unforeseen situations. Within our archi-
tecture, the Layer 2-component is responsible for this
task. This component consists of three parts: an Ob-
server, an EA and a simulator. The Observer is re-
sponsible for capturing the current situation descrip-
tion provided by the Observer on Layer 1. As the cur-
rent usage of system components (in terms of CPU,
RAM, etc.) has influence on the selection process of
the LCS, the Observer is responsible for the schedul-
ing of optimisation tasks.
The EA is responsible for evolving new classifiers.
The algorithm is implemented as a standard Genetic
Algorithm (cf. e. g. (B
¨
ack and Schwefel, 1996) for
details). This algorithm needs a possibility to analyse
the performance of the current parameter set, which
is done by using the standard network simulation tool
NS/2 (Web, 2009). The simulator needs a scenario
and an implementation of the current protocol. The
implementation is mandatory, but the configuration
of the simulator depends on the observed situation as
measured by the Observer on Layer 1. Therefore, a
scenario is computed taking into account all observed
attributes (e. g. for BitTorrent: number of peers, seeds,
download and upload speeds, etc.)
4 RESEARCH ROADMAP
Within the previous Section the architecture of the
system has been described. The system based on this
has been realised and applied to a first protocol (Bit-
Torrent - cf. (Cohen, 2003)). We demonstrated the
potential of our system and validated the feasibility
of our approach for a BitTorrent-based test scenario,
leading to an increase in terms of the objective func-
tion (amount of downloaded data or download-time)
of up to 20% (Tomforde et al., 2009). Further eval-
uation of this protocol is in progress. Additionally,
we are working on demonstrating the applicability of
our approach to other systems by replacing the SuOC
(adapt and optimise mobile ad-hoc network protocols
instead of a BitTorrent Client).
To completely achieve the goal as defined in Sec-
tion 3.1 essential parts are still not investigated. The
following part of this Section will emphasise the main
focus of the future research based on this system.
Therefore, we introduce the main research topics in
accordance to the particular layers of our architecture.
4.1 Layer 0
The system aims at being generic in terms of control-
ling different protocols and protocol types. These pro-
tocols are situated at Layer 0 of our architecture as de-
picted in Fig. 1. To demonstrate the generic character
of our approach we are going to apply the system to
exemplary representatives of different protocol types.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
288
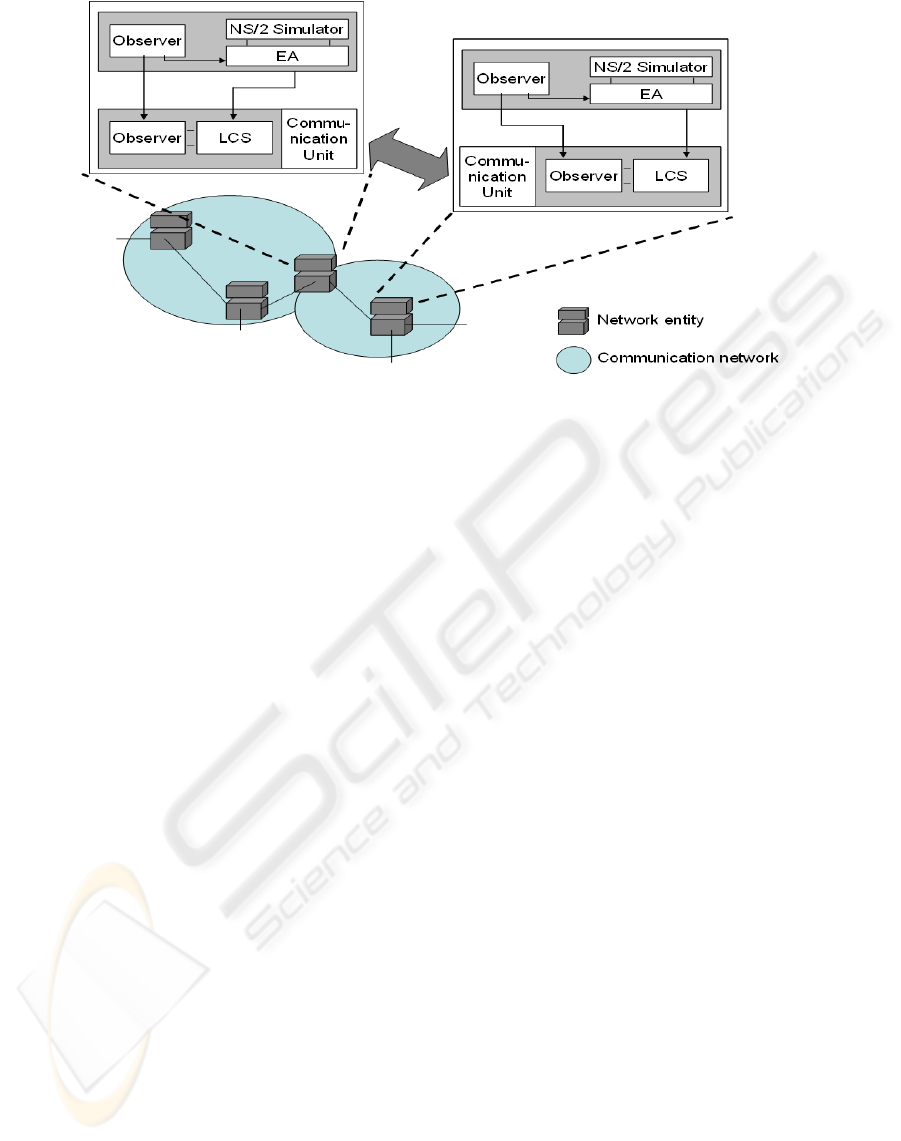
Figure 2: Collaborating network control systems.
Starting with BitTorrent as representative for Peer-
to-Peer systems and the current application to mo-
bile ad-hoc networks we will investigate the control
of other protocol domains. Therefore, protocols for
sensor networks are from interest as well as classical
Internet protocols (like TCP/IP) and very specialised
approaches like e. g. protocols for the communication
in smart camera networks (Hoffmann et al., 2008).
In addition to the application of different proto-
col types, we aim at extending the control scope to
cross-layer optimisation (Wang et al., 2005). This
means e. g. for TCP/IP that the configuration of IP
is selected depending on the current situation and of
TCP depending on the configuration of IP.
4.2 Layer 1
The performance of the on-line adaptation mecha-
nism at Layer 1 depends primarily on the applied
learning technique. Due to this dependency we aim
at validating the usage of our LCS by comparing it to
other learning techniques. Therefore, existing tech-
niques will be analysed based on the usage within our
architecture and implemented if promising.
In addition to the increase of performance by
analysing the learning component, the overall perfor-
mance can be increased by allowing for collaboration.
Neighboured entities should get the ability to collab-
orate with each other (see Fig. 2) in order to schedule
Layer 2 tasks, exchange knowledge, and avoid redun-
dant simulation-based learning.
4.3 Layer 2
As the off-line generation of new parameter sets is
resource- and time-consuming, an improvement is
necessary. The urgent target for this component is to
speed up the rule creation process. The approach to
solve this problem consists of two different strategies:
a speed-up at start time and an approximation at run-
time. At start time the system does not have any other
rules than the standard parameter set of the protocol,
which leads to the need of a fast mechanism to learn
rules for a set of exemplary rules within the configu-
ration space. These rules might have a lower quality
than an optimised one, but they will be replaced with
an optimised version during runtime.
The other aspect of the speed-up process at
Layer 2 is, that nodes might not have sufficient re-
sources for the optimisation task (e. g. sensor net-
works). Hence, research here will focus on approx-
imating a reasonable parameter set (taking those pa-
rameter sets into account which are situated close to
the situation description). This means, an intelligent
inter- and extrapolation mechanism is needed in com-
bination with a half-centralised solution (e. g. periodic
updates from a service running on other nodes).
Another aspect of the Layer 2 optimisation is to
use stand-by time (no active optimisation task) to op-
timise the coverage of the configuration space. This
means some kind of active learning may be used
to pro-actively generate parameter sets for situations
where currently no adequate parameter set is known.
Additionally, a collaboration mechanism will be help-
ful to schedule these active learning tasks for a set of
neighboured entities.
DYNAMIC CONTROL OF NETWORK PROTOCOLS - A New Vision for Future Self-organising Networks
289

5 CONCLUSIONS
This paper presented a system for the dynamic adap-
tation of network protocol parameters. The system
monitors the situation at particular nodes and reacts
on changes by adapting the communication protocol
client. It is able to learn new control strategies and
works on a self-organised basis. We explained our
position that the presented system will be able to in-
crease the performance of future communication net-
works without changing the whole technical back-
ground. Finally, we named the main research fields
for our approach based on the introduced goal. Our
system can also serve as a good testbed for the inves-
tigation of innate aspects of OC systems like trustwor-
thiness or collaboration patterns.
REFERENCES
B
¨
ack, T. and Schwefel, H.-P. (1996). Evolutionary comput-
ing: An overview. In Proceedings of IEEE Conference
of Evolutionary Computing.
Cohen, B. (2003). Incentives Build Robustness in BitTor-
rent. In Proceedings of the 1st Workshop on Eco-
nomics of Peer-to-Peer Systems, Berkeley.
Handley, M. (2006). Why the internet only just works. BT
Technology Journal, 24(3):119–129.
Hoffmann, M., Wittke, M., Bernard, Y., Soleymani, R.,
and Hahner, J. (2008). Dmctrac: Distributed multi
camera tracking. Distributed Smart Cameras, 2008.
ICDSC 2008. Second ACM/IEEE International Con-
ference on, pages 1–10.
Jennings, B., van der Meer, S., Balasubramaniam, S.,
Botvich, D., Foghlu, M. O., Donnelly, W., and Strass-
ner, J. (2007). Towards autonomic management of
communications networks. Communications Maga-
zine, IEEE, 45(10):112–121.
Kephart, J. O. and Chess, D. M. (2003). The Vision of
Autonomic Computing. IEEE Computer, 36(1):41–
50.
Khelil, A., Marron, P. J., Becker, C., and Rothermel, K.
(2007). Hypergossiping: A generalized broadcast
strategy for mobile ad hoc networks. Ad Hoc Net-
works, 5:531–546.
Montana, D. and Redi, J. (2005). Optimizing parameters
of a mobile ad hoc network protocol with a genetic
algorithm. In GECCO ’05: Proc. of the 2005 confer-
ence on Genetic and evolutionary computation, pages
1993–1998, New York, NY, USA. ACM.
Prothmann, H., Rochner, F., Tomforde, S., Branke, J.,
M
¨
uller-Schloer, C., and Schmeck, H. (2008). Organic
control of traffic lights. In Proc. of the 5th Intern.
Conference on Autonomic and Trusted Computing.
Richter, U., Mnif, M., Branke, J., M
¨
uller-Schloer, C.,
and Schmeck, H. (2006). Towards a generic ob-
server/controller architecture for Organic Computing.
In Hochberger, C. and Liskowsky, R., editors, INFOR-
MATIK 2006 – Informatik f
¨
ur Menschen!, volume P-
93 of GI-Edition – Lecture Notes in Informatics (LNI),
pages 112–119. K
¨
ollen Verlag.
Schmeck, H. (2005). Organic Computing – A new vi-
sion for distributed embedded systems. In Pro-
ceedings of the 8th IEEE International Symposium
on Object-Oriented Real-Time Distributed Computing
(ISORC’05), pages 201–203.
Schmid, S., Sifalakis, M., and Hutchison, D. (2006). To-
wards autonomic networks. In 3rd Intern. Annual
Conference on Autonomic Networking, Autonomic
Communication Workshop (IFIP), Lecture Notes in
Computer Science. Springer Verlag, Heidelberg.
Siekkinen, M., Goebel, V., Plagemann, T., Skevik, K.-A.,
Banfield, M., and Brusic, I. (2007). Beyond the fu-
ture internet–requirements of autonomic networking
architectures to address long term future networking
challenges. Future Trends of Distributed Computing
Systems, IEEE International Workshop, 0:89–98.
S
¨
ozer, E. M., Stojanovic, M., and Proakis, J. G. (2000). Ini-
tialization and routing optimization for ad-hoc under-
water acoustic networks. In Proc. of Opnetwork’00.
Tomforde, S., Steffen, M., H
¨
ahner, J., and M
¨
uller-Schloer,
C. (2009). Towards an organic network control sys-
tem. submitted for publication.
Turgut, D., Daz, S., Elmasri, R., and Turgut, B. (2002).
Optimizing clustering algorithm in mobile ad hoc net-
works using genetic algorithmic approach. In Proc.
of the IEEE Global Telecommunications Conference
(GLOBECOM ’02), pages 62 – 66.
Wang, J., Li, L., Low, S. H., and Doyle, J. C. (2005). Cross-
layer optimization in TCP/IP networks. IEEE/ACM
Trans. Netw., 13(3):582–595.
Web (2009). The Network Simulator - NS/2.
http://www.isi.edu/nsnam/ns/.
Wilson, S. W. (1995). Classifier fitness based on accuracy.
Evolutionary Computation, 3(2):149–175.
Ye, T., Harrison, D., Mo, B., Sikdar, B., Kaur, H. T., Kalya-
naraman, S., Szymanski, B., and Vastola, K. (2001).
Network Management and Control Using Collabora-
tive On-line Simulation. In Proceedings of IEEE ICC,
Helsinki, Finland. IEEE.
Ye, T. and Kalyanaraman, S. (2001). An adaptive random
search algorithm for optimizing network protocol pa-
rameters. Technical report, Rensselaer Polytechnic
Inst.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
290
