
APPLYING STATE-OF-THE-ART TECHNIQUES
FOR EMBEDDED SOFTWARE ADAPTATION
Suman Roychoudhury, Christian Bunse and Hagen Höpfner
International University in Germany, Campus 3, 76646 Bruchsal, Germany
Keywords: Aspect-oriented Programming, Model-driven Engineering, Embedded Systems.
Abstract: Embedded software systems affect critical functions of our daily lives (e.g., software used in automobiles,
aircraft control systems), and represent a significant investment by government, scientific and corporate
institutions. Modern research approaches for software engineering and programming language design, such
as aspect-oriented software development and model-driven engineering have been investigated as effective
means for improving modularization and reuse of software. However, one research trend for embedded
system development has focused primarily on the underlying hardware, neglecting the need of applying
advanced software engineering techniques for the several million lines of code existing in the embedded
domain. In this paper, we evaluate the above mentioned state-of-the-art techniques as a viable solution for
the development, analysis and evolution of embedded software systems.
1 INTRODUCTION
Embedded software plays an important role in
today’s world and is built into electronics in cars,
audio equipment, robots, appliances, toys, security
systems, televisions and mobile phones. Although
there has been a significant amount of research for
software modeling, testing, restructuring and
transformation-based tools in the non-embedded
space, there is a lack of clarity and emphasis for
such tools in the embedded domain. The main
reason for such isolation is the low-level code base
and its greater focus on the underlying hardware
(Day, 2005). This has resulted in the use of more
informal methods in the embedded space. However
with an ever increasing size of embedded software
projects, device manufacturers should realize the
importance of using modern software engineering
tools and techniques that can significantly improve
the development, analysis, and maintenance of such
software. In this paper, we investigate how aspect-
oriented programming (AOP) (Laddad, 2003) and
model-driven engineering (MDE) (Schmidt, 2006),
can be applied for embedded system development
and maintenance.
2 EMBEDDED SOFTWARE
ADAPTATION
In this section, we demonstrate how embedded
software can be adapted using AOP and MDE
techniques. A simple case study application serves
as the core example.
The example illustrates a microcontroller
(ATMega128) enabled racing car that can be
programmed to steer through a predefined track
without colliding with obstacles. The car also
receives navigational data (i.e., GPS data) during the
course of its run. To achieve the desired goal,
several hardware devices and sensors were attached
to the car as shown in the Figure 1. Two ultrasonic
sensors were attached to the front and back of the
car for collision avoidance. A GPS device was
mounted to provide navigational data (e.g., latitude,
longitude, altitude). A photo-interrupter with
encoder wheel provided the speed and direction of
the car. Finally, a wireless communication link was
established between the car and a PC
(HyperTerminal) using a Bluetooth device.
In the next sub-section we show how AOP can
be applied towards configuring the servos, the
sensors and also printing statistics to the
HyperTerminal using aspects.
305
Roychoudhury S., Bunse C. and H
¨
opfner H. (2009).
APPLYING STATE-OF-THE-ART TECHNIQUES FOR EMBEDDED SOFTWARE ADAPTATION .
In Proceedings of the 4th International Conference on Software and Data Technologies, pages 305-308
Copyright
c
SciTePress
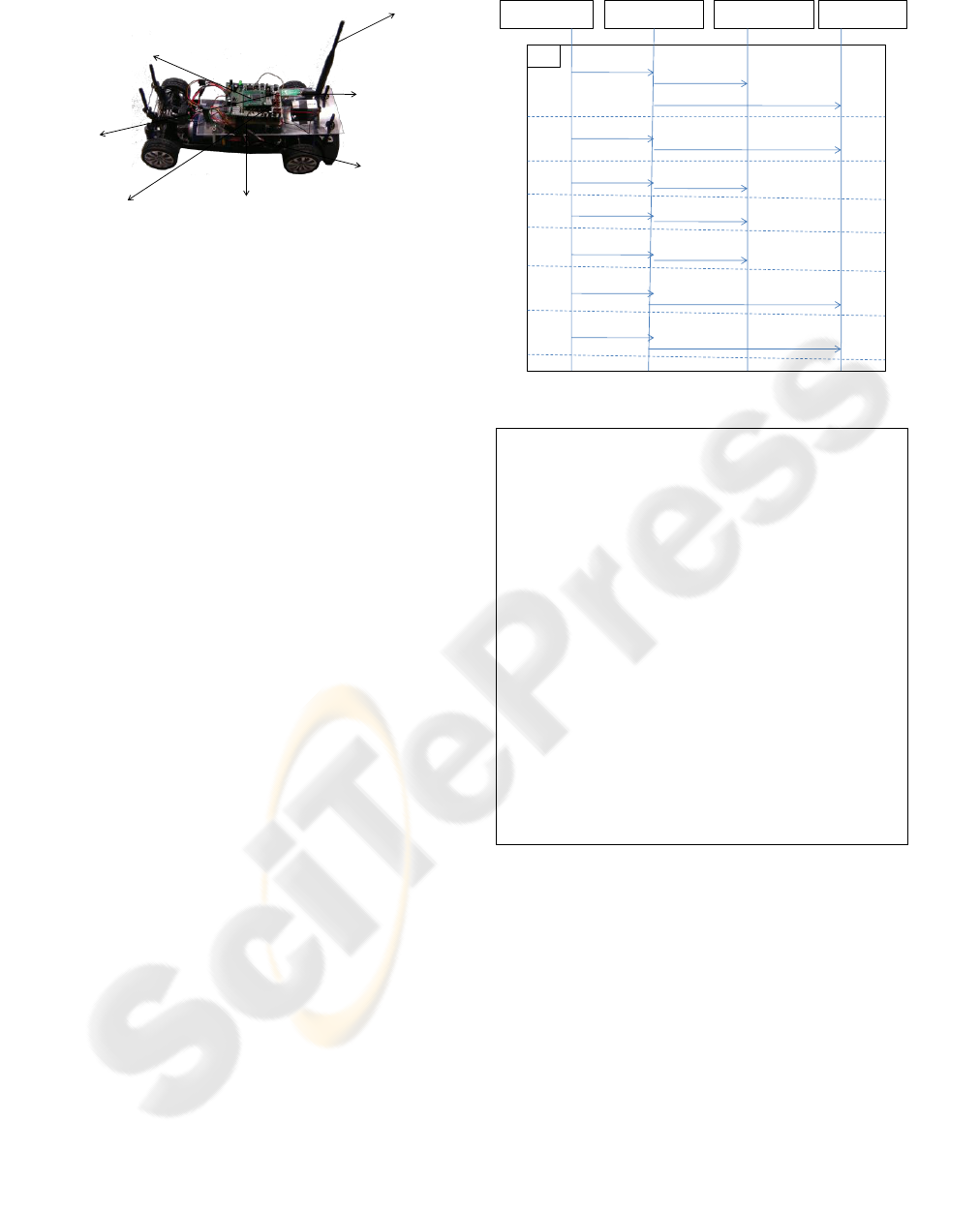
Figure 1: Microcontroller enabled Race Car.
2.1 Adapting AOP Techniques
In the example shown in Figure 1, two servos are
used. The electronic speed controller servo is used to
control the speed of the car, whereas the steering
servo is used to steer the car. The servos are directly
connected to the microcontroller and consist of a dc
motor, gear train, potentiometer and some control
circuitry. To drive the car, pulses are sent
continuously to the control circuitry of the servo
whose widths vary between 1-2 ms. The
potentiometer transforms these pulses into a voltage
which represents a certain rotation of the shaft.
These values are then compared to average values
and the shaft is rotated until both voltages match
each other.
Figure 2 illustrates the different control
components and the basic interaction functions used
to control the servos. The function SetServoPosition
is used to send a particular pulse value ranging
between 1ms - 2ms to control the speed and
direction of the car. In the above scenario, the
function SetServoPosition is crosscutting and is
being called for every action associated with either
the electronic speed servo or steering servo. This
crosscutting functionality of the servos can be
captured as a single aspect written in AspectC++
(Spinczyk, Gal and Schröder-Preikschat, 2002) as
shown in Figure 3.
Note that to steer the car towards centre or left or
right, the servo shaft is rotated by 90 degrees or 0
degree or 180 degrees respectively. The
corresponding value of the control signal position is
passed as args to the around advice (see Figure 3).
The advantage of using an aspect allows the
servo software to be controlled from one single
location. Moreover, this allows finer control of the
servo shaft, which can now rotate at any angle
between 0-180 degrees instead of predefined
positions (left, right or centre) as depicted in Figure
2. Further, along with flexible servo control
mechanism, basic statistics could be obtained using
Figure 2: Interaction Diagram for Servo Control.
aspect ControlServos {
unsigned int position;
pointcut Steer() = void
Steer%(...);
pointcut StartStopEngine() =
void %Engine(...);
advice execution
(StartStopEngine ()|| Steer())
&& args(position): around ()
{
rprintf("Current Servo
position:
%d",GetServoPosition());
SetServoPosition (position);
tjp->proceed();
rprintf("New Servo position:
%d", position);
}
};
Figure 3: An Aspect for Capturing Servo Position.
the rprintf function as shown in Figure 3. Note
that the around advice acts as a wrapper to the
existing steering functions.
There are other areas in the car control circuitry
where aspects could be useful. It is often the case
that several devices share the same clock and require
the clock timer to be synchronized. For example, the
photo interrupter and encoder wheel, which is
connected to measure the car speed and direction,
needs to be synchronized with the servo clock timer.
A possible solution is to attach a lock-unlock
handler as an aspect to the clock timer for all such
devices that require synchronization.
Microcontroller
Antenna
Bluetooth
Steering Servo
Electronic Speed Controller
GPS
Utrasonic Sensors
Hyperterminal Microcontroller SteeringServo SpeedServo
StartEngine
SetServoPosition(center)
SetServoPosition(zero)
SteerCenter
SetServoPosition(zero)
SetServoPosition(center)
StopEngine
SetServoPosition(left)SteerLeft
SetServoPosition(right)SteerRight
alt
SetServoPosition(forward)
SteerForward
SetServoPosition(reverse)
SteerBackWard
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
306
2.2 Adapting MDE Techniques
In this section we examine how MDE tools and
techniques can ease the construction of embedded
software systems. We will investigate two possible
directions in that MDE can assist developers in the
embedded domain:
GUI based domain-specific modeling
languages
Text based domain-specific modeling
languages
In the first category, we will look into the
Embedded System Modeling Language (ESML)
(Shi, 2004), which is specifically intended for
component-based avionics applications for the
Boeing-Boldstroke. In our view, ESML can be
customized for other embedded domains as well.
ESML allows defining interfaces, events,
components, interactions and configurations in the
form of UML class diagrams (UML, 2009).
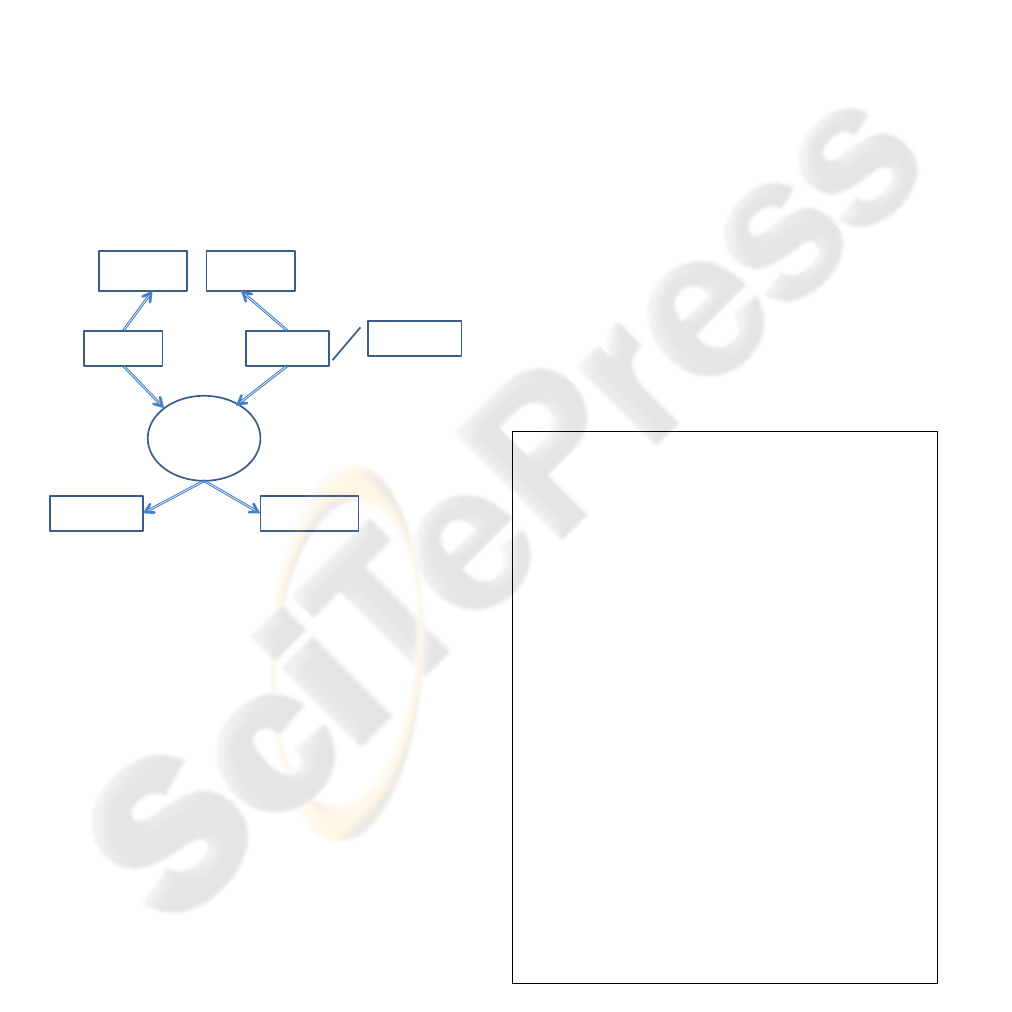
Figure 4: Generative Programming for Embedded
Software.
For our case study application, the interface
model (see Figure 4) was used to capture various
interface methods namely, GetGPSData,
GetSonarData, GetEncoderData, and
ReadTimerControl. The interface model also
captures various constraints (e.g., pulses must occur
within an interval of 1ms-2ms). Using ESML, event
types were used to indicate events such as
StartEngine, StopEngine, SteerBackward,
SteerForward, and SteerLeft. Moreover, new events
can be added to the existing metamodel in an event
repository. The ESML model for our case study
application is integrated within the Generic
Modeling Environment (Lédeczi et al., 2001). Model
interpreters were used to generate the underlying
method and event stub code (refer Figure 4).
However, the method and event implementation
code has to be manually added to the system.
The second dimension using text based domain-
specific modeling languages provides another option
for embedded system development. Generally, the
low-level nature of embedded programs makes them
hard to comprehend and difficult to evolve over a
period of time. For every hardware or
communication channel (e.g., processor type, serial
or parallel communication), there is a typical
protocol that one needs to follow. Such requirements
make the area particularly niche and there is less
availability of domain-specific modeling languages
(DSMLs) to aid developers to construct embedded
software.
We believe that instead of considering the entire
embedded domain, sub-domain specific modeling
languages can be used, which can only focus the
core areas of a sub-domain. For example in the case
of our case study application DSMLs can be
developed that focuses on the semantics related to
the automobile domain only. Similarly for a
different sub-domain like mobile systems, a separate
DSML model can be used. We carried out our initial
investigation with a text-based metamodeling tool
suite called ATLAS Model Management
Architecture (AMMA).
package Automobile {
class RaceCar extends LocatedElement
{
attribute name: String
reference sensors[*]
container: Sensor;
reference controllers[*]
container:
Controller;
reference processors[*]
container:
Processor;
reference channels[*]
container: Channel;
...
}
class Sensor extends LocatedElement {
attribute name : String;
}
class SonarSensor extends Sensor {
attribute distance : String;
}
class TempSensor extends Sensor {
attribute temperature : String;
}
...
Figure 5: KM3 specification for RaceCar Metamodel.
?
generatestub
conformsTo
conformsTo
processModelData
Event
Metamodel
Interface
Metamodel
Event
Model
Interface
model
Model
Interpreter
Interface
Stub Code
Event Stub
Code
Constraints
APPLYING STATE-OF-THE-ART TECHNIQUES FOR EMBEDDED SOFTWARE ADAPTATION
307

Using Kernel Meta-metamodel (KM3, part of the
AMMA tool suite) (Jouault and Bézivin, 2006), a
snippet of the domain-specific metamodel for our
case study application is shown in Figure 5. In this
figure, the RaceCar class is the main class that
defines the abstract syntax of the language. It
consists of sensors, controllers, processors,
communication channels and other hardware
devices. The concrete syntax for the RaceCar model
is written in TCS, however, for brevity is not shown
here.
Using model transformation techniques, the low-
level code required to run the system can be
generated for the RaceCar model. Thus, by focusing
on graphical or textual based DSMLs, domain
engineers can build domain specific embedded tools
that can raise the abstraction level of hardware
centric embedded programs.
3 SUMMARY
AND CONCLUSIONS
The proliferation of embedded software in everyday
life has augmented the conformity and invisibility of
software. As demands for such software increase,
future requirements will necessitate new strategies
for improved modularization, construction and
restructuring in order to support the requisite
adaptations (Masuhara and Kiczales, 2003). Proven
software engineering techniques like AOP and MDE
that occupy a bigger space in the non-embedded
domain must be investigated and disseminated into
the embedded space.
In this paper, we demonstrated how each of these
techniques can improve the construction effort of
embedded software. A greater emphasis must be
given to specialized tools and domain specific
languages that can raise the abstraction level from
hardware centric applications to software centric
models and analysis engines.
A growing challenge in the embedded world has
been to reduce the energy consumption of battery
powered devices. As part of future work, we will
look into software centric static and dynamic
optimizations embedded mobile systems that
combine the power of each of these techniques.
REFERENCES
Day, R. (2005) 'The Challenges of an Embedded Software
Enginee', Embedded Technology Journal.
Jouault, F. and Bézivin, J. (2006) 'KM3: A DSL for
Metamodel Specification', Formal Methods for Open
Object-Based Distributed Systems, Bologna, Italy,
171-185.
Laddad, R. (2003) AspectJ in Action: Practical Aspect-
Oriented Programming, Manning.
Lédeczi, Á., Bakay, A., Maroti, M., Volgyesi, P.,
Nordstrom, G., Sprinkle, J. and Karsai, G. (2001)
'Composing Domain-Specific Design Environments',
IEEE Computer, vol. 34, no. 11, November, pp. 44-51.
Masuhara, H. and Kiczales, G. (2003) 'Modeling
Crosscutting in Aspect-Oriented Mechanisms',
European Conference on Object-Oriented
Programming, Springer-Verlag LNCS 2743,
Darmstadt, Germany, 2-28.
Schmidt, D. (2006) 'Model-Driven Engineering',
IEEE Computer, February.
Shi, F. (2004) Embedded Systems Modeling
Language,http://www.omg.org/news/meetings/worksh
ops/MIC_2004_Manual/06-4_Shi_etal.pdf.
Spinczyk, O., Gal, A. and Schröder-Preikschat, W. (2002)
'AspectC++: An Aspect-Oriented Extension to C++',
International Conference on Technology of Object-
Oriented Languages and Systems, Sydney, Australia,
53-60.
UML (2009) Unified Modeling Language 2.2,
http://www.omg.org/technology/documents/formal/um
l.htm.
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
308
