
REACTIVE AUTONOMIC SYSTEM PERFORMANCE
MODELING AND SELF-MONITORING WITH
CATEGORY THEORY
Olga Ormandjieva, Heng Kuang and Stan Klasa
Department of Computer Science and Software Engineering, Concordia University
Montreal, Quebec, H3G 1M8, Canada
Keywords: Reactive Autonomic System, Performance Modeling, Self-monitoring, Category Theory, Representational
Theory of Measurement, Decision Making.
Abstract: The research presented in this paper was motivated by the need to build performance self-monitoring and a
decision-making process into Reactive Autonomic Systems (RAS). In order to achieve RAS compliance in
terms of the imposed performance policies, we formalize RAS modeling and performance control in a
single framework based on a representational theory of measurement and category theory. Category theory
is expressive enough to capture qualitative and quantitative knowledge about heterogeneous RAS
requirements and their interrelationships, as well as a decision-making mechanism, in one formal
representation, where structure and reasoning are inextricably bound together. Thus, category theory
provides a computational mechanism which enables this knowledge to be applied to performance data and
RAS information structures in order to arrive at valid conclusions.
1 INTRODUCTION
The main obstacle to further progress in the IT
industry is software complexity, since the difficulty
of managing massive computing systems goes well
beyond the capabilities of IT administrators. Some
of that complexity derives from the real-time and
reactive nature of software systems. One of the
solutions to the emerging complexity problem is
autonomic computing, which helps by using
technology to manage technology. As a result, low
level complexities are hidden from end users or
removed altogether (IBM Corporation, 2006) (IBM
Tivoli, 2005). With autonomic behavior, real-time
reactive systems can increasingly self-manage, and
be more adaptive to their environment.
Current formal methods have not adequately
addressed the issue of verifying policies on behavior,
such as performance requirements, which constitute
one of the most important nonfunctional
requirements for Reactive Autonomic Systems
(RAS).
According to (ISO/IEC 9126-1:2001, 2001),
level of performance is “the degree to which the
needs are satisfied, represented by a specific set of
values for quality characteristics.” Performance
characteristics can be quantified through
measurement procedures which provide
measurement methods and functions, as well as a
meaningful analysis algorithm for combining
measurement data along with decision making
criteria.
The research proposed in this paper addresses the
following challenges:
z The requirement of the performance-critical
characteristics of the RAS for specification
and for theoretically valid measurement data;
z The need for performance self-assessment to
be regulated by policies which state the
constraints on system performance
fluctuations at runtime.
In order to achieve RAS compliance with the
imposed performance requirements, we formalize
RAS and performance modeling in a single
framework (RASF) based on a representational
theory of measurement and category theory.
Category theory is expressive enough to capture
qualitative as well as quantitative knowledge about
heterogeneous RAS requirements and their
interrelationships, and a decision-making
325
Ormandjieva O., Kuang H. and Klasa S. (2009).
REACTIVE AUTONOMIC SYSTEM PERFORMANCE MODELING AND SELF-MONITORING WITH CATEGORY THEORY .
In Proceedings of the 4th International Conference on Software and Data Technologies, pages 325-330
DOI: 10.5220/0002257003250330
Copyright
c
SciTePress
mechanism in one formal representation, where
structure and reasoning are inextricably bound
together. Furthermore, category theory allows for a
formal graphical representation of the syntax and
semantics of models which goes beyond existing
graphical languages, such as UML, where the
semantics of the models is informal or semi-formal.
The rest of this paper is organized as follows:
Section 2 surveys related work. RAS modeling is
described in section 3. Section 4 introduces
performance modeling. RAS and performance
models are integrated into an RASF Metamodel in
section 5, and further formalized in terms of
category theory in section 6. Our conclusions are
presented and future work directions outlined in
section 7.
2 RELATED WORK
This section gives a brief overview of related work
on performance modeling and self-monitoring in
autonomic systems.
IBM Research has developed a framework called
Policy Management for Autonomic Computing
(PMAC) (IBM Tivoli, 2005), which provides a
standard model for the definition of policies and an
environment for the development of software objects
that can hold and evaluate policies.
The paper (Abdelwahed and Kandasamy, 2006)
describes a model-based control and optimization
framework for designing autonomic systems which
continually optimizes their performance by changing
workload demands as well as operating conditions.
The performance management problem of interest
can be considered to be one of sequential
optimization under uncertainty, and a look-ahead
control approach is used to optimize system
behavior forecast over a limited prediction horizon.
The basic control concepts are then extended to
tackle distributed systems where multiple controllers
must interact with one another to ensure the overall
performance goals.
The research presented here differs from work
previously done in the area in an important way: the
RAS components, the measurement procedure, and
the performance are modeled as categories within
the same formal framework, which makes it possible
to formalize the self-monitoring policies, verify both
their consistency and their completeness, and
consequently build performance self-monitoring into
the RAS implementation.
3 RAS MODELING
Systems designed to be reactive and autonomic
(RAS) are complex and built from potentially very
large numbers of elements which are highly
autonomic and reactive, but which are also socially
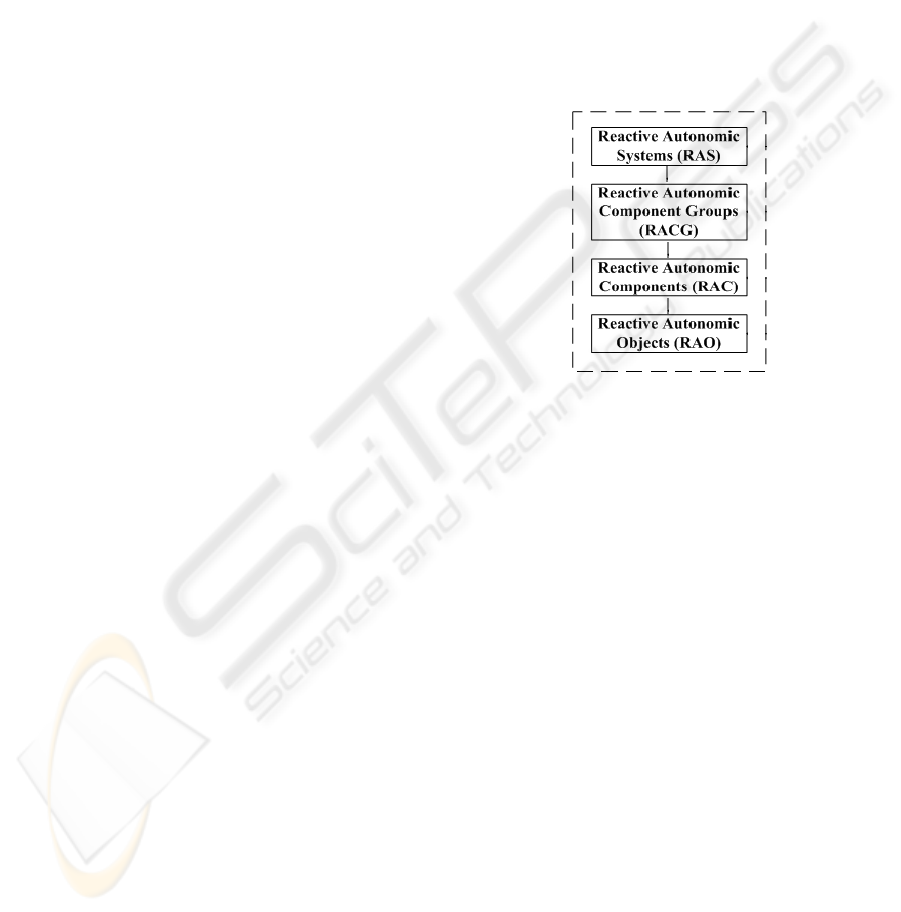
interactive. The formal and comprehensive
framework used for modeling and controling
performance in RAS, the RASF, is built on a 4-tier
layered structure (see Figure 1), which includes
Reactive Autonomic Objects (RAO), Reactive
Autonomic Components (RAC), Reactive
Autonomic Component Groups (RACG), and
Reactive Autonomic Systems (RAS).
Figure 1: RASF tiers.
The RASF structure is made up of distributed
RACG with their asynchronous communication. The
RAC is a set of synchronously communicating
RAO, where one of the RAO is designated as the
leader of the workers. The autonomic behavior, such
as self-monitoring or self-analyzing, is implemented
by the RAC leaders, group supervisors, and system
managers in the RAC, RACG, and RAS tier
respectively.
The current trend in autonomic system
development is towards the direct or dynamic
composition of autonomic components through task
workflows. We abstract the behavior of the RAS to a
collection of communicating task processes. The
workers are mainly responsible for reactive tasks,
while the leader works on autonomic tasks such as
coordinating self-monitoring at the component level.
The assumption here is that each group performs an
autonomic task process, and so there is no
dependency between the task processes of different
groups. RACG are required to react in real time to
requests from the system manager for the fulfilment
of a task process. The task workflows are scheduled
by TACG supervisors, while individual tasks from
the specified workflow are assigned to RACs in the
group and then optimized, given the resource
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
326

constraints of the RAO in real time. The task
workflow requires both communication and
synchronization of individual tasks to ensure reliable
performance by the supervised group, governed by
RAS policies.
RAS performance policies impose restrictions on
task process communication and synchronization,
and so need to be considered as an integral part of
the RAS self-management capability. To allow for
managing group task process performance, we need
to express performance in quantifiable terms by
devising an appropriate performance measurement
model. We describe next the hierarchical modeling
of that performance.
4 MODELING PERFORMANCE
In our approach, performance is modeled as a
hierarchical information structure. The performance
model proposed in this paper ensures that all
standard aspects of quality are considered from both
the internal and external points of view. It is
decomposed into four qualitative performance
characteristics: i) reliability (the capability of the
software product to maintain a specified level of
performance when used under specified conditions
(ISO/IEC 9126-1:2001, 2001); ii) fault tolerance (the
capability of the software product to maintain a
specified level of performance in cases of software
faults (ISO/IEC 9126-1:2001, 2001); iii) efficiency
(the capability of the software product to provide
appropriate performance, relative to the amount of
resources used, under stated conditions (ISO/IEC
9126-1:2001, 2001); and iv) performance
compliance (the capability of the RAS to adhere to
response time, as well as to throughput policies,
which are related to task execution and collaboration
respectively). Those high-level characteristics are
repeatedly refined, and in each of the
decompositions the offspring (sub) characteristics
can contribute partially or fully towards satisfying
the parent. The lowest level corresponds to the
quantifiable performance sub characteristics of the
RAS tasks computed by applying a measurement
method − a logical sequence of operations applied
directly to the source, that is, to a task or task
process. The result of applying a measurement
method is called a base measure. The base measures
are then combined by a measurement function to
obtain the derived measures required for
characterizing the parent (indicator) in accordance
with the associated rules for the interpretation of
measurement data (ISO/IEC 15939, 2007).
An indicator provides an estimate or evaluation
of the utility of the performance characteristic,
which is derived from an analysis of the
measurement data (values) and with respect to a
defined decision criterion. “Utility” in this context
means a property in any task process which tends to
produce a quality benefit or to prevent disruption
(failure behavior or unacceptably low reliability) to
an RAC, a RACG, or the whole system.
The combined utility of all indicators serves as a
basis for performance self-management decision
making on the part of the RACG supervisor.
The self-management decision-making process
can be modeled as a set of alternative rules linking
the performance utility of a task process to certain
actions to outcomes (Roberts, 1979). For example,
the input is task process performance utility and the
output is the action required to improve the task
process performance level in the RAS. If decisions
are being made in a situation of certainty, then we
choose that action the certain outcome of which
maximizes (minimizes) the utility of the task
process, depending on the rewards associated with
each outcome of an action (Roberts, 1979). The
outcome of the action consists of changes to the task
process which are executed. Their effect on the
performance utility of the task process is then
evaluated. The reward associated with the outcome
will increase if the utility of the task process
increases following the change. Otherwise, the
reward decreases.
One of the possible solutions to increasing
performance visibility and explicitly linking it to the
task processes in such systems is to enforce their
integration by applying metamodeling.
5 RASF METAMODEL
The RASF metamodel proposed in this paper is
aimed at encompassing models of different kinds of
requirements: functional (task process) and
nonfunctional (performance), which form the
foundation of the software system information
structure. The task processes are scheduled by the
RACG supervisor and are decomposed into
individual tasks. The performance of the task
processes has to conform to RAS policies,
specifically those on synchronization and
communication. This is controlled by first collecting
measurement data on those processes, and then
analyzing the data according to the decision criteria,
determining the utility of the task process, and
taking action intended to further increase task
process utility.
REACTIVE AUTONOMIC SYSTEM PERFORMANCE MODELING AND SELF-MONITORING WITH CATEGORY
THEORY
327
RACG SupervisorGroup Task Process
Indicator
Policy
Individual Task
Decision CriteriaDerived measure
1
*
*
Synchronization
reliability
Communication
Decision-Making Rules
Base measure
Measurement Method Measurement Function
1
efficiency
Analysis
Model
compliance fault tolerance
Utility Function
1
1
-Reward
OutcomeAction
Applied on
*
*
*
*
*
**
*
schedule
*
measure
Control
-Utility
Performance
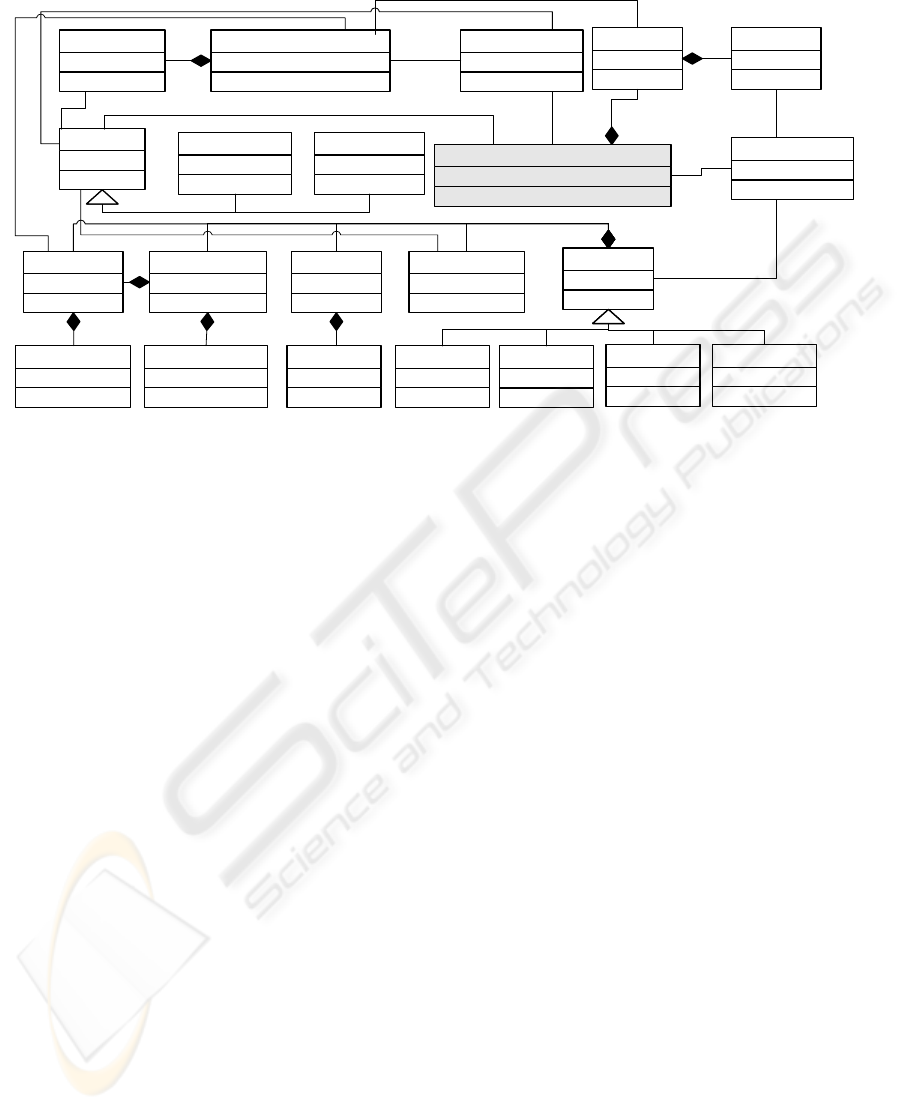
Figure 2: RASF (partial) metamodel.
Knowledge on RAS task processes, the
performance hierarchy of measurable characteristics
in line with the RAS self-management decision-
making policies, and the rules and the relationships
among them are represented in the metamodel
structure in Figure 2. Figure 2 depicts the semantics
of the relationships between different constructs of
the RASF Metamodel in terms of a UML diagram. It
should be noted, however, that such a diagram does
not formally capture the semantics of the constructs
or their relationships. This lack of formalism is an
obstacle in the process of formalization and
consequent automation of the performance modeling
and self-management mechanisms. Furthermore, the
theoretical validity of the measurement procedures
and the decision-making process cannot be
established from this semi-formal notation.
This lack of formalism prompted us to exploit
the idea of a uniform graphical formalization of the
metamodeling of RAS behavior and performance
self-management within the RAS life cycle based on
the representational theory of measurement and
category theory.
6 RASF METAMODEL WITH
CATEGORY THEORY
Category theory is a branch of mathematics that, par
excellence, addresses “structure”, which is the main
motivation behind this research: the structure
emerges from interactions between elements as
captured by arrows, and not extensionally as in set
theory. Compared with other methods of formalizing
software concepts, category theory is not a semantic
domain in which the description of components and
connectors is formalized, but rather involves the
semantics of interconnections, configurations,
instantiation, and composition, which are important
aspects of engineering RAS with both autonomous
and autonomic behavior. Moreover, automation may
be achieved using category theory.
Category theory provides the basic building
blocks of metamodeling using the fundamental
notions of category, object, morphism, and functor.
Informally, a category may be regarded as a
collection of heterogeneous objects and morphisms
which model the social life of these objects, that is,
their interactions. A category can be defined as zero
or more objects bound together, where each object
may be either a primitive or a category. In addition,
a category may be augmented, diminished, or joined
with other categories to produce a new category.
Formally, a category consists of objects: A, B, C,
etc., and arrows (morphisms) f: A → B where, for
each arrow f, there are given objects: dom(f), cod(f)
called the domain and the co domain of f, and
indicated as A = dom(f) and B = cod(f) respectively.
Central to category theory is the notion of
composition: given arrows f: A → B and: B → C
with cod(f) = dom(g), there is an arrow: g ◦ f : A →
C called a composite of f and g. For each object A,
there is a given arrow: id
A
: A → A called the identity
arrow of A. The category must satisfy the following
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
328

laws: i) Associativity: h ◦ (g ◦ f) = (h ◦ g) ◦ f for all f:
A → B, g: B → C, h: C → D; ii) Unit: f ◦ id
A
= f =
id
B
◦ f for all f: A → B. A functor F: C → D between
categories C and D is a structure-preserving
mapping of objects to objects, along with arrows to
arrows: i) F(f: A → B) = F(f): F(A) → F(B); ii) F(g
◦ f) = F(g) ◦ F(f); iii) F(id
A
) = id
F(A)
Category theory for RAS self-management has
adopted an approach of correction by construction,
through which components are specified, proved,
and composed so as to preserve their properties. In
an abstract sense, we are dealing with arrow
diagrams of task processes where the existing arrows
represent cooperation channels in a very general
way. This gives us the justification for associating
the Task Process category with the PATH category,
as described in (Pfalzgraf, 2004), where the
morphisms are sequences (paths) of consecutive
arrows, each node representing a task and each
arrow being a structure-preserving mapping, that is,
a morphism. This defines the composition of arrows
in a natural way (concatenation of consecutive
arrows), and this composition is associative. The
identity arrow with respect to each object in Task
Process will be assumed to exist by definition;
according to graph theory, it is a loop to the
corresponding node.
The Task Process category represents the
empirical relational structure in the measurement
procedure, and it includes the task categories and
their relations. The Base Measure category
represents the numerical relational structure to
which the empirical relational structure is mapped.
The measurement procedure is deemed valid if it is a
structure-preserving (homomorphic) function. It is
easy to see that the mapping Measurement Method
(MM): Task Process → Base Measure between the
categories Task Process and Base Measure is a
functor of objects to objects along with arrows to
arrows satisfying the functor property outlined
earlier. The base measures can be further combined
using categorical products and mapped to derived
measures (characterizing different performance
characteristics) by a morphism Measurement
Function (MF): Base Measure x Base Measure x
…→ Derived Measure.
In software engineering decision making, we
often consider multidimensional alternatives with a
variety of quality characteristics or from several
points of a view. Such situations arise when we are
trying to explain a dependent variable, such as
performance utility, on the basis of a number of
independent variables, such as reliability, fault
tolerance, etc. In order to calculate a utility function
of multidimensional alternatives, we need to define a
collection of alternatives. We think of the set of
alternatives as a Cartesian product of all considered
attributes characterizing performance expressed as
Reliability x Fault Tolerance x Efficiency x
Compliance, and the set of decision criteria, where
Reliability is a set of all possible values of the
domain of the utility function morphism for
reliability, and so on. The categorical product
relations p0, p1, p2, p3, and p4 are the
corresponding projections of the product Reliability
x Fault Tolerance x Efficiency x Compliance x
Decision Making Criteria to Decision Making,
Reliability, Fault Tolerance, Efficiency and
Compliance respectively (see Figure 3). Such a
product corresponds to all possible alternatives
representing the values of the Indicator.
The functor Utility Function: Reliability x Fault
Tolerance x Efficiency x Compliance x Decision
Making Criteria → Performance Utility in Figure 3
maps the Indicator alternatives to a sample scale
where performance utility is qualitatively
categorized as Excellent, Acceptable, or
Unacceptable. These performance categories provide
feedback on performance utility, and help determine
whether or not the task processes in the RAS satisfy
the performance policies or need improvement. The
functors Method (MM), Measurement Function
(MF), and Utility Function have to satisfy the
postulates of the representational theory of
measurement. By definition, each functor is a
structure-preserving mapping and thus guarantees
the theoretical validity of the performance
assessment.
We model performance self-management as a
decision-making process in category theory as
sequences of consecutive arrows linking
Performance Utility to Actions to Outcomes. The
generic functor Decision Rule: Preference Utility →
Actions maps each object of Preference Utility to an
object in Actions. Each action has to be mapped to
an outcome, or set of outcomes, and each outcome is
associated with a reward that affects the decision
criteria (or policies). The outcome is meant to
improve task process performance, and the
execution of the prescribed changes is modeled with
the generic functor Execute: Outcomes → Task
Process.
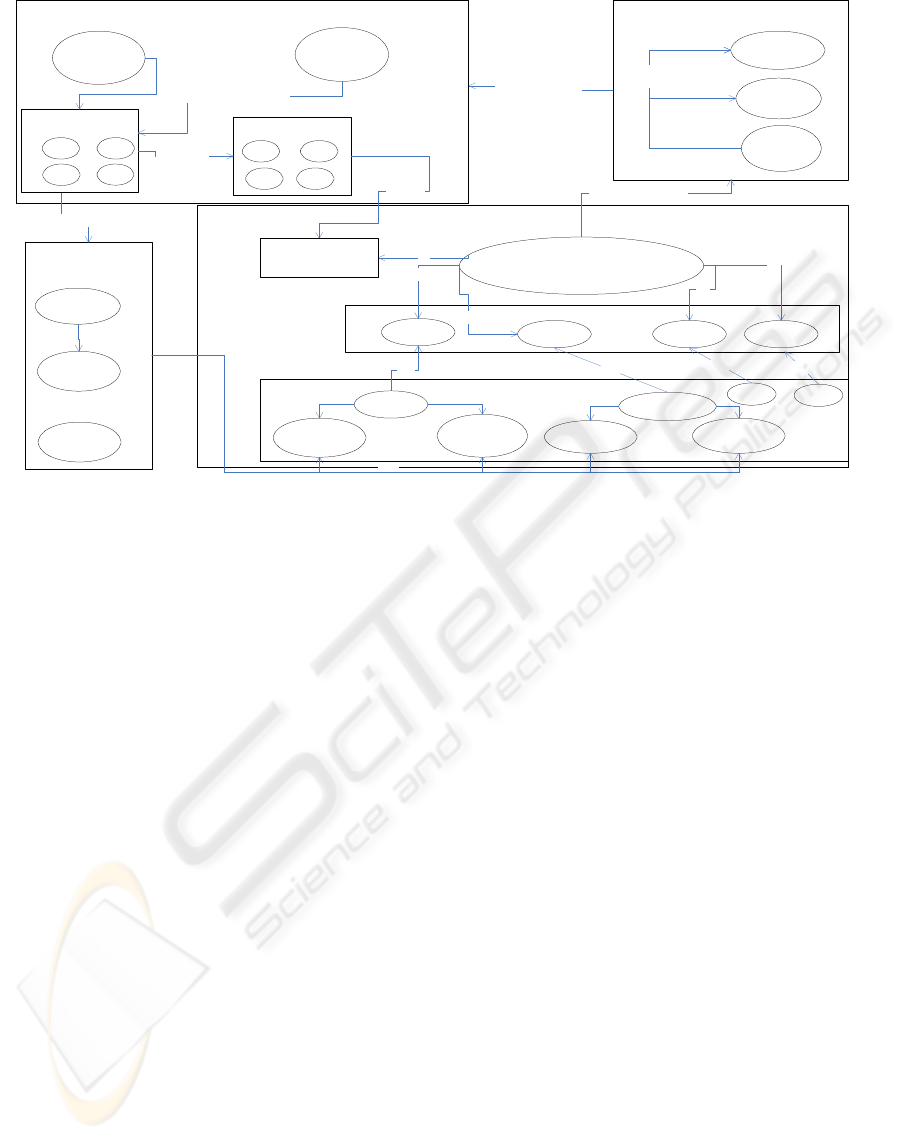
The diagram in Figure 3 can be abstracted as a
concatenation of consecutive arrows Measurement
Method (MM), Measurement Function (MF), Utility
Function, Decision Rule, Execute. The diagram
commutes, which guarantees reliable self-
assessment on task process performance and valid
decision making based on performance utility.
REACTIVE AUTONOMIC SYSTEM PERFORMANCE MODELING AND SELF-MONITORING WITH CATEGORY
THEORY
329
Indicator Category
Preference Utility Category
Task Process
Category
Task 1
T1
Task2 T2
Derived Measure Category
[Expected
Utility]
Decision rule
Unacceptable
Excellent
Acceptable
Utility Function
Reliability x Fault Tolerance x
Efficiency x Fault Tolerance x
Decision Criteria
Actions
action
A1
execute
action
A2
Outcomes
Reward
associate
O1 O2
C1 C2
Probability of outcome
O3
O4
C3 C4
assess
Reliability
Fault
Tolerance
Base Measure Category
BM1 x BM2
Base
Measure
BM1
Base
Measure
BM2
Base
Measure 3
BM3 x BM4
Base
Measure 4
MF
MF
p0
Decision
Criteria
ComplianceEfficiency
...
MF
MF
...
MM
Preference
order
...
p1
p2
p3
p4
Figure 3: Categorical representation of RAS metamodel with built-in performance self-monitoring.
7 CONCLUSIONS AND FUTURE
WORK
The research reported in this paper proves that
category theory can provide a sound, scientific,
and theoretically valid basis on which to integrate
the RAS structure and performance models, which
can be treated as mathematical objects and
investigated by formal analysis. It should be noted
that the concepts of soundness and completeness
do not arise in categorical specification. We are
currently working on the development of a
graphical tool to capture RAS modeling and
performance measurement through category
theory.
Given the behavior of the rapidly evolving
RAS and the need to effectively make decisions
during runtime, there is a need to propose
probabilistic analogs for traditional algebraic
theories of fundamental measurement. We aim to
achieve this goal by providing a probabilistic
theory of software measurement which can act as a
foundation for both measurement and decision
making in complex RAS processes. One of the
extensions to the current RASF formalization we
are now investigating is the use of the Markov
Decision Process for establishing the level of
confidence in the choice of decision-making rules
in a given context. The choice of actions in the
decision-making process can be made on the basis
of expected utilities and on the analysis of the
probabilities associated with each alternative
outcome. This issue will be tackled in our future
work.
REFERENCES
IBM Corporation, 2006. An architectural blueprint for
autonomic computing. White Paper, 4th Edition.
IBM Tivoli, 2005. Policy Management for Autonomic
Computing – Version 1.2. Tutorial, IBM Corp.
ISO/IEC 9126-1:2001 International Standard, 2001.
Software engineering – Product quality – Part 1:
Quality model.
Abdelwahed, S., Kandasamy, N., 2006. A Control-Based
Approach to Autonomic Performance Management
in Computing Systems. In Autonomic Computing:
Concepts, Infrastructure, and Applications, pp. 149-
167, CRC Press.
International Standard ISO/IEC 15939 Second Edition,
2007. Systems and software engineering —
Measurement process.
Roberts, F., 1979. Measurement Theory. Encyclopedia
of Mathematics and its Applications, Addison-
Wesley.
Pfalzgraf, J., 2004. ACCAT tutorial. Presented at 27th
German Conference on Artificial Intelligence (KI-
2004), September 24, 2004:
http://www.cosy.sbg.ac.at/~jpfalz/ACCAT-
TutorialSKRIPT.pdf
ICSOFT 2009 - 4th International Conference on Software and Data Technologies
330
