
Prospects of “One-level” Architecture of Control Systems
on the basis of Ethernet Network - DCS "Tornado-N"
with “One-level” Architecture on the basis of Ethernet
Oleg V. Serdyukov
Institute of Automation and Electrometry
Siberian Brunch Russian Academy of Science
Akademika Koptiuga ave, 1a, Novosibirsk, Russia
Abstract. Modern DCS of technological processes have “multi-level”
architecture. The “low” level of DCS is represented by controllers. They
provide three main functions: data acquisition, processing and control of object.
Input-output devices are connected directly to controller for information
interchange with object and processing unit (CPU). The upper level connects
controllers together and provides their interaction with "the top" level of a
system. In systems with such architecture, controller which needs to obtain
variables connected to an other controller, it requires to have a special complex
service for interconnection with the other controller: for performance of base
“low” level function of input-output, upper level is involved. Many suppliers of
control systems do not have a solution for it, i.e. the data exchange function of
controller in vast majority of systems is absent. Level of today's network
technologies allows to construct homogeneous “one-level” control system on
the basis of a high-efficiency local network, for example Fast Ethernet. In such
systems network is used not only for interaction of workstations, servers, but
for direct interaction with input-output devices, connected directly to Fast
Ethernet network. Thus the concept of classical controllers disappears and
control algorithms may be carried out in any point of the system.
1 Introduction
The idea of common bus interface now exists for more than 30 years. This principle is
being used to construct separate subsystems (e.g. computers, controllers) and
integration of such subsystems. There exists a majority of bus interfaces for these
purposes.
Bus (e.g. PCI) merges all the primary devices in computers and servers, bus
interface in controllers merges all processor and I/O modules. Thus, different
subsystems use different inner bus interfaces. Modern distributed control systems
(DCS) of technological processes have “multi-level” architecture. The “low” level of
controllers providing information interchange and commands with object through the
devices of input-output, connected directly to the controller (Figure 1).
The next upper level connects controllers together and provides their interaction
with "the top" level of a control system. In systems with such architecture, controller
Serdyukov O. (2009).
Prospects of “One-level” Architecture of Control Systems on the basis of Ethernet Network - DCS ”Tornado-N” with “One-level” Architecture on the basis
of Ethernet.
In Proceedings of the International Workshop on Networked embedded and control system technologies: European and Russian R&D cooperation,
pages 75-80
Copyright
c
SciTePress

which needs to obtain variables connected to an other controller requires to have the
special complex service for interconnection with the other controller, i.e. for
performance of base “low” level function of input-output, upper level will be
involved.
Fig. 1. Traditional heterogeneous architecture.
This problem not so is simple, as may seem and many suppliers of control systems
do not have a solution for it, i.e. the data exchange function of the controller’s in vast
majority of systems is absent. The level of today's network technologies allows to
construct homogeneous “one-level” control system on the basis of a high-efficiency
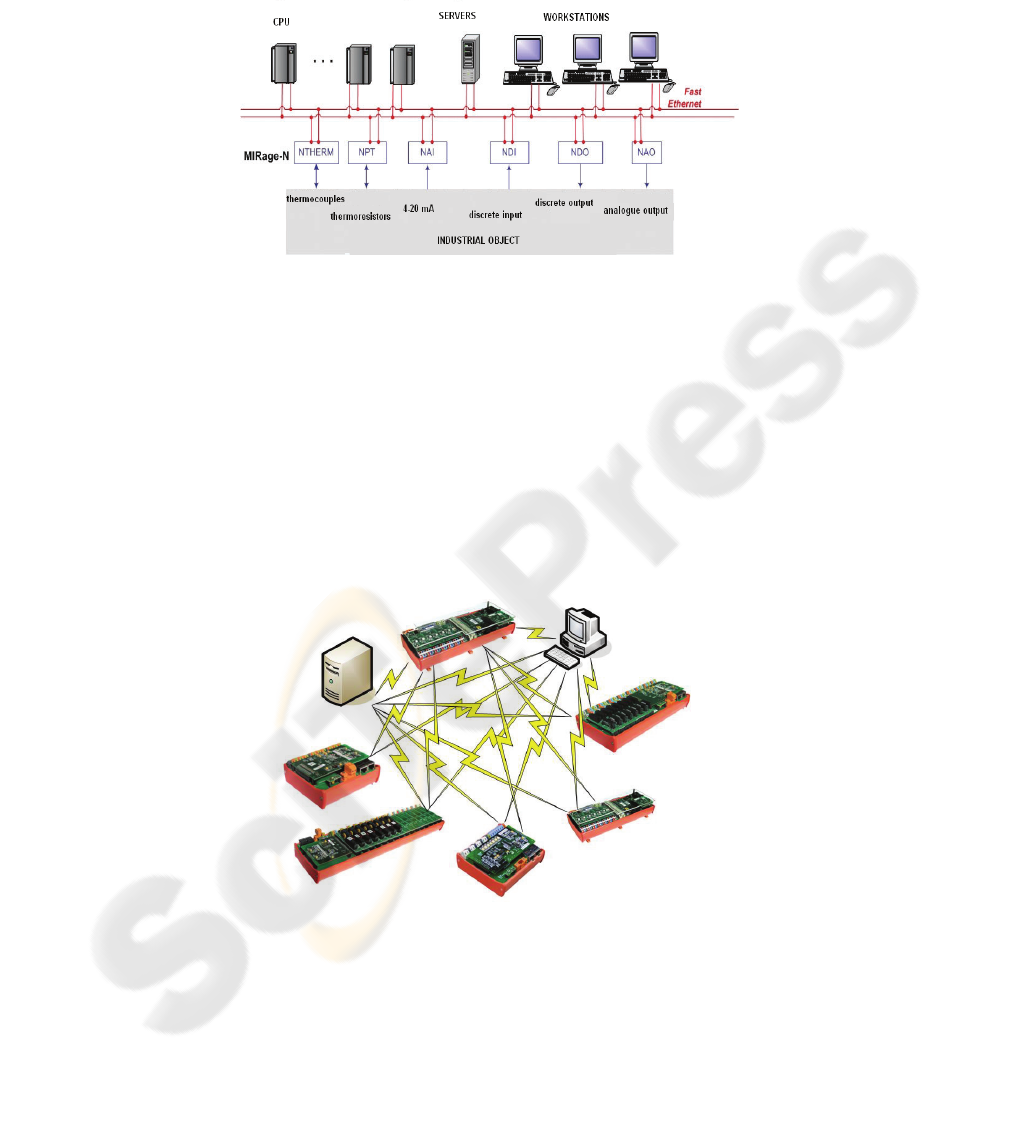
local bus interface (Fig. 2). In such systems the network is used not only for
interaction of workstations, servers, but for direct interaction with input-output
devices, connected directly to network. It is quite possible to suggest the possibility of
building the whole system based on one common bus interface (a homogeneous
system). Nowadays Ethernet technology gives the developers of Industrial Control
Systems all the sufficient facilities.
2 Fast Ethernet Bus
Analyzing the history of computer systems progress one can note such tendency that
with development of new technologies the system constructor gets an opportunity to
deal with more and more higher-level interfaces of informational exchange.
Nowadays Ethernet is a Bus Interface of high-level for building DCS. If I/O modules
are connected directly to the common-system bus interface, we have different
architecture of DCS with a list of new advantages; controllers are assumed as
something different from familiar sight.
Thus the concept of classical controllers disappears. Control algorithms can be
carried out in any point of the system, but for reasons of reliability it is more
preferable and better to allocate special computing devices of "an automation server".
76
It is possible to consider such architecture almost "ideal", possessing nearby
considerable advantages. It is possible to expect that the future development of
control systems will go this way.
Fig. 2. Homogeneous architecture.
The main goal of “Modular Systems Tornado” company’s (www.tornado.nsk.ru,
Nosovibirsk, Russia) developers was to create the automation facilities for maximum
broad spectrum of process tasking, to have an opportunity to use these facilities on
really large major industrial objects. MIRage-N I/O modules with duplex Ethernet bus
may be successfully implemented not only in systems of general-automation use but
the module line is sufficient for objects with enhanced reliability, fail-safety and high-
availability requirements. Distributed I/O modules of this product line can be
implemented both as parts of DCS and for local means of visualization and
maintenance.
Unlike the other products of distributed I/O, MIRage-N line provides the data of
industrial workflow directly to the common Fast Ethernet industrial bus aggregating
all elements of the automation system: CPU modules, servers and workstations.
Fig. 3. MIRage-N: equal right DCS member.
Architecture with absence of controllers (in usual assumption) gives a new degree
of freedom to developer. There is no need in affixment of I/O modules to the
77

specified definite CPU (like in all common systems). This factor substantially
simplifies the process of DCS cabinet’s construction: MIRage-N modules transfer
data to any active CPU of the system attaining the state of distribution of data
collecting and data processing.
2.1 MIRage-N Advantages
Thereby systems with distributed I/O based on MIRage-N modules have such
advantages:
It’s standard and innovative, specified by use of progressive Ethernet
technologies and organization of data transfer services by copper cables, optical
cables and radio communication;
Fail-safety provided by duplex Ethernet bus. Communication channel
restoration is an expensive long-run and complicated procedure. Duplication of
the industrial bus gives an opportunity to detect and restore the failure troubles.
Such system is operable and runs even with failure of one communication
subsystem. Also according to requirements it is possible to duplicate the
functional parts and assemblies of the system;
Reduction of charges: as an industrial bus interface, Fast Ethernet (10/100
Mbit/sec) gives a wide variety of computing sources from industrial CPU to
PC-compatible devices that dramatically reduces the upper-level cost of
industrial control system. Distributed structure of the system allows to make
changes “on-site” enhancing operational and metrological characteristics of the
system and substantially reducing expenditures for cable materials;
High Availability: the system architecture allows to make hot-swap of any
system element, replacement of defective modules without an impact on the
rest of the system with minimum time;
hot-swap of any system element, replacement of defective modules without an
impact on the rest of the system with minimum time;
Convenience in exploitation. The module construction allows the mounter to
make the replacement of defective elements without demounting of field cables.
Signals from sensors are plugged directly in MIRage-N modules in WAGO
spring clips that do not require periodic maintenance;
Scalability, extensibility. The functioning system may be populated with
additional modules. The scaling procedure does not require any modification of
functioning part of the system. Industrial interface bus of large and major
industrial objects may contain several segments that use different
communication mediums, e.g. copper wire, optical cable and radio connection;
Developed software for integration of MIRage-N modules with ISaGRAF
programming environment. Developed applications include .dll libraries
implementing Modbus interfaces; OPC DA server supplying compatibility with
SCADA systems for Windows OS supplying duplex Ethernet bus interface;
components for usage of modules in LabView environment;
Fixed time cycle of data acquisition for all devices equal to time of answering
interval for one device (1 msec). The possibility of same time device scan rids
from necessity of passive reply wait.
78
Open standards and technologies used in bus interface modules MIRage-N give
the possibility to develop and maintain any systems of automation with different
configuration of Ethernet, any processing devices, any programming environments
and SCADA-systems, servers, e.t.c. The configuring of MIRage-N modules and
visualization of data is maintained with “Configurator” software.
Unified module body of MIRage-N allows the installation of the module on DIN-
rail (35 mm), it provides electrical insulation, galvanic isolation, fail-safe connection
of the sensor cables. Field cable cross section square is 0,08 to 2,5 mm2.
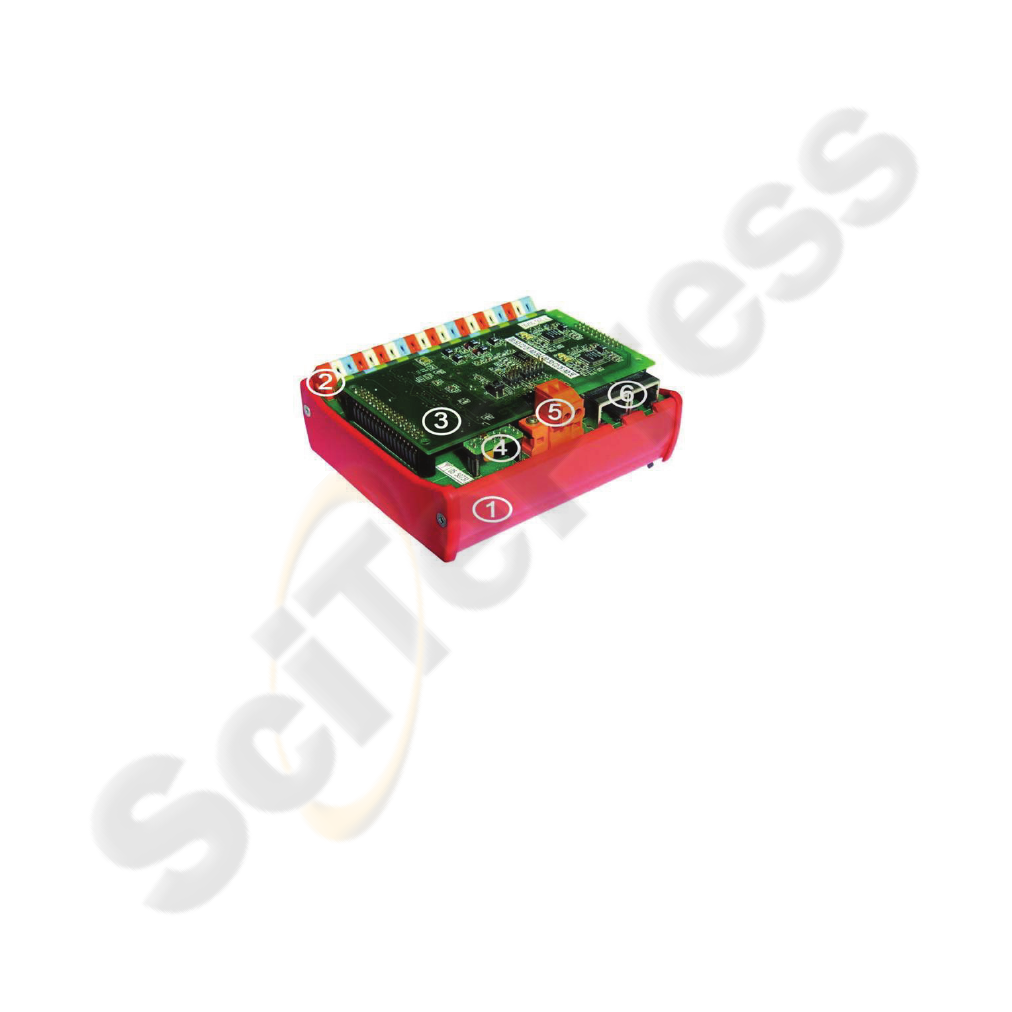
2.2 Module Construction
Every MIRage-N module is a two-part construction – motherboard and plug-in boards
- mezzanines. Mezzanines contain all the active elements. Figure 4 features MIRage-
N parts:
1. Motherboard with no active elements;
2. Field Terminal blocks;
3. Mezzanine connectors;
4. Protective device;
5. Power supply connection;
6. Fast Ethernet connection inputs.
Fig. 4. MIRage-N module construction (with cover removed).
2.3 MIRage-N Line
The MIRage-N line includes all types I/O modules to fulfil the requirements of
Industrial Control Systems:
MIRage-NAI – 16 differential channels or 32 single channels, analogue signal
input -20 + 20- mA, -10 +10 V, 16-bit delta-sigma ADC, 3-pole digital filter,
individual DC-DC converter to power supply of sensor.
MIRage-NDIO – 24 discrete channels. 12 input channels, 12 output channels.
24 V, 220 V.
MIRage-NDI – 24 input channels. 24 V or 220 V, 4mA input current.
79

MIRage-NDO – 24 output channels. 24 V or 220 V AC/DC: 3 A – AC, 0,5 A –
DC.
MIRage-NAO – 4 analogue output channels, 8 programmable discrete
channels.
NIRage-NTHERM – 8 analogue channels, thermocouples.
MIRage-NPT – 8 analogue channels, thermoresistors.
The company "Modular Systems Tornado" has finished system engineering of
DCS "Tornado-N" with “one-level” architecture on the basis of Ethernet. Today DCS
“Tornado-N” is used to build industrial control systems of large power units for
power stations.
3 Conclusions
In architecture where all system elements are connected directly to integrated Ethernet
bus interface the developer gets one of the most promising solutions applicable in
DCS development. DCS “Tornado-N” architecture with common Ethernet bus based
on MIRage-N distributed I/O line gives substantial economic benefits; in comparison
with other world well-known industrial automation companies DCS “Tornado-N”
decreases expenses up to 30 % in major automation systems of heat and power
engineering plants with hundreds and thousands of signals and furthermore gives
developer new levels of freedom in system construction allowing to use different
connection schemes and benefit from open standards and technologies underlying in
described approach philosophy.
Described above architecture approach is currently being implemented in
automation systems of power stations, thermal power plants and other major
industrial objects in Russia and CIS and demonstrated it’s positive qualities.
It is very likely that soon this approach will become the most widespread architecture
in modern DCS.
References
1. Serdyukov, O.V., Timoshin A.I., 2005. Paper templates. In Bus interface of industrial
controllers development. IAE, Novosibirsk.
2. Serdyukov, O.V., 2006. Tornado-TM complex, ISUP, 1(9). Moscow.
3. Serdyukov, O.V., 2008. DCS “Tornado”: life in major power engineering, REM magazine.
Moscow.
4. Lubashin, A.N., 2007. Industrial Ethernet: form office to industrial plant, The Industrial
Ethernet Book. Moscow.
5. Kolesnikov, S., 2005. Technologies and protocols of data transfer in industry: Fast
Ethernet . IT in industry.
6. Krugliak, K.V., 2003. Ethernet networks in industrial automation: faster, longer, reliable.
STA, 1/2003.
80
