
QUALITATIVE SPATIAL REASONING VIA 3-VALUED
HETEROGENEOUS LOGIC
Konstantine Arkoudas, Selmer Bringsjord
Departments of Cognitive and Computer Science, RPI, Troy, NY, U.S.A.
Sangeet Khemlani
Department of Cognitive Science, Princeton University, NJ, U.S.A.
Keywords:
Qualitative spatial reasoning, 3-Valued logic, Heterogeneous reasoning, Diagrams, Sat-solving, Constraints,
Relative position, Orientation, Flip-flop calculus, Combined direction calculus.
Abstract:
Systems for qualitative spatial reasoning (QSR) are usually formulated as relation algebras, and reasoning in
such systems is performed by constraint-satisfaction techniques. While this is often adequate, it is a rather
inexpressive framework that cannot model and solve many spatial reasoning problems; it can also complicate
the combination of different spatial formalisms, e.g., the combination of topological with metric primitives,
or absolute orientation with relative orientation. Here we suggest an alternative approach, whereby spatial
information is expressed in a rich quantified 3-valued logic, equipped with a novel semantics for dealing with
incomplete information. Decidability is ensured by a systematic compilation into propositional logic and the
use of SAT solvers. To illustrate, we define and implement a new system for two-dimensional positional
reasoning that combines Frank’s cardinal-direction calculus, the ip- op calculus for reasoning about relative
orientation, and various new positional primitives. Unlike previous work, the system uses diagrams as well as
symbolic formulas. In particular, the logic we introduce is heterogeneous, meaning that it combines symbolic
and diagrammatic representation and inference.
1 A HYBRID SYSTEM FOR
REASONING ABOUT
ORIENTATION
Representing and reasoning about position and ori-
entation is an active area of QSR, with applications
ranging from robot navigation and geographic infor-
mation systems to computational linguistics. Most of
the existing systems are based either on absolute ref-
erence systems or on relative reference systems. For
the latter, a reference axis is introduced by fixing a
given origin and a relatum, and then the position of a
given referent is described with respect to that axis. It
is increasingly recognized that realistic scenarios de-
mand the ability to handle both absolute and relative
orientation.
The system we are about to introduce, CDC (for
Combined Direction Calculus), integrates:
1. an absolute-reference orientation system im-
plementing Frank’s cardinal-directions calculus
(Frank, 1991); and
2. a relative-reference orientation system in which
the reference axis is specified by an arbitrary ori-
gin and relatum, implementing Ligozat’s flip-flop
calculus (Ligozat, 1993).
We introduce several additional primitives that are not
part of either of these two systems.
In what follows we demonstrate the system on a
number of examples, starting with a problem from
(Isli et al., 2001) that illustrates the need for combin-
ing absolute- and relative-orientation reasoning:
1. Viewed from Hamburg, Berlin is to the left of
Paris, Paris is to the left of London, and Berlin
is to the left of London.
2. Viewed from London, Berlin is to the left of Paris.
3. Hamburg is to the north of Paris, and north-west
of Berlin.
4. Paris is to the south of London.
80
Arkoudas K., Bringsjord S. and Khemlani S. (2009).
QUALITATIVE SPATIAL REASONING VIA 3-VALUED HETEROGENEOUS LOGIC.
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development, pages 80-87
DOI: 10.5220/0002306200800087
Copyright
c
SciTePress
The first two premises are consistent. Indeed, if we
assert
the first two premises (i.e., insert them into
the knowledge base) and then issue the command
(find-model)
, CDC will automatically find and dis-
play the following spatial model:
Hamburg Berlin
London Paris
Likewise, the last two premises are mutually con-
sistent. CDC automatically produces the following
model for them:
Hamburg
London Berlin
Paris
Nevertheless, the conjunction of all four premises
is inconsistent,
1
and CDC readily discovers this.
There are two ways to demonstrate the inconsistency.
One is to ask the system to find a model for the current
knowledge base (which contains all four premises). If
the knowledge base is inconsistent, as in this example,
the system will report that no such model exists. The
other is to ask whether the sentence
false
follows
from the knowledge base. In this case CDC confirms
that
false
indeed follows.
Consider next the Indian-tent problem, a rather
simple problem that nevertheless presents challenges
to several QSR systems (R¨ohrig, 1997, p. 229) and
used as a benchmark by the SparQ-Toolbox (Wallgr¨un
et al., 2006): There are four objects (points, regions,
or whatever), A, B, C, and D, whose spatial arrange-
ment is as follows:
1. Viewed from A,C is to the right of B (equivalently,
C is to the right of the line from A to B).
2. Viewed from C, D is to the right of B.
3. Viewed from A, D is to the left of B.
The goal is to deduce that viewed from C, D is to the
right of A. Geometrically, the configuration must be
isomorphic to the following:
1
The only reason the four premises are jointly incon-
sistent is because, in calculi of this sort, directions such
as north and northwest are required to be mutually exclu-
sive. That clearly represents a departure from ordinary us-
age, where the two are not only compatible (e.g., we say
that Chicago is both northwest and north of Baltimore), but
in fact one implies the other. The requirement is neverthe-
less customarily imposed because in the constraint-based
paradigm that has dominated the field, the base relations of
a QSR calculus must be mutually exclusive.
J
J
J
J
J
J
r
r
D
B
r r
CA
When we
assert
these three premises and ask CDC
to find a model, the system responds with the follow-
ing diagram:
A
B D
C
Further, when we
query
whether it follows logically
that D must be to the right of A from C’s perspective,
CDC quickly responds affirmatively.
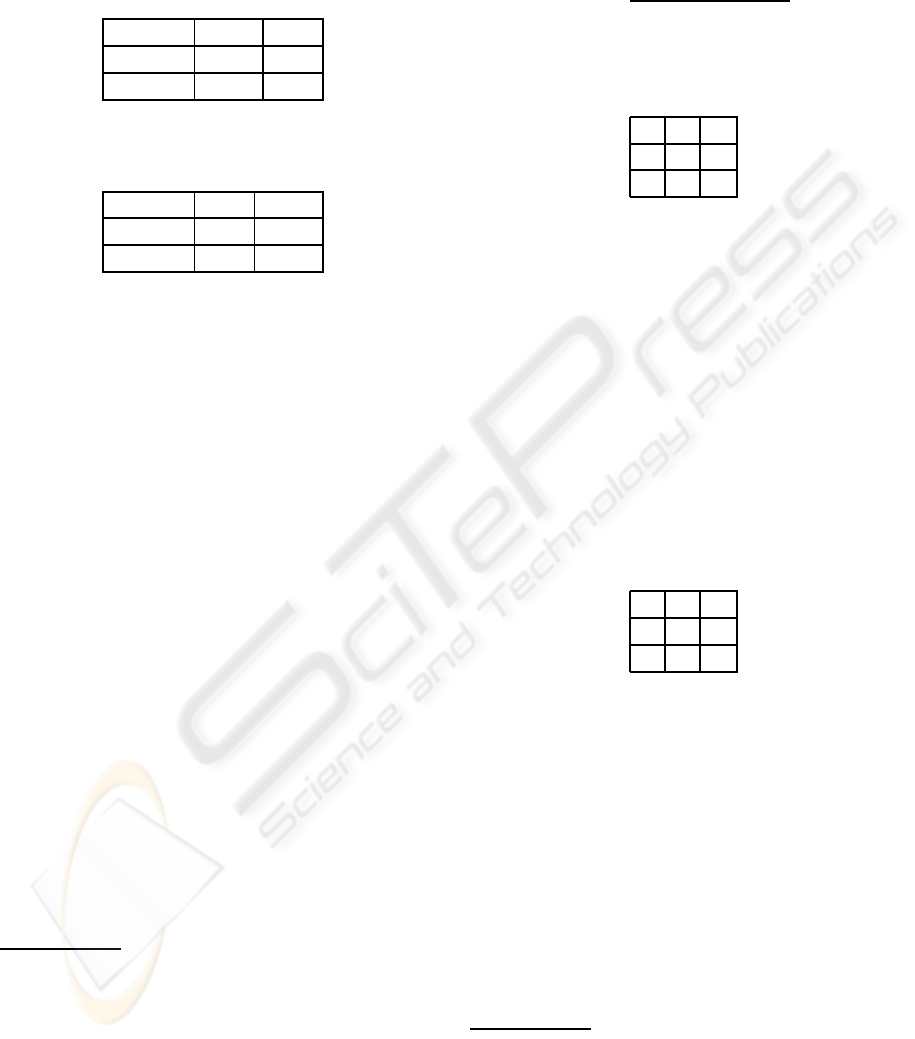
For our third and final example, suppose that we
must arrange five objects (e.g., furniture pieces) A, B,
C, D, and E, according to the following constraints:
1. A must not be adjacent to C.
2. Nothing is to the right of E.
3. If D and A are not adjacent, then B should be in
the middle.
4. D is above all others.
5. E and D are adjacent.
When we ask CDC to find a model for these require-
ments, it promptly
2
returns the following diagram:
D
A B E
C
The remainder of the paper is structured as fol-
lows. The next section contains a discussion of our
overallapproach to QSR in general terms. In section 3
we apply this methodology to define CDC rigorously.
In section 4 we show how to carry out the SAT re-
duction for CDC and in general. Finally, section 5
concludes.
2 GENERAL METHODOLOGY
A spatial problem deals with a finite system of objects
s
1
,. ..,s
N
. Each object has a number of attributes,
which typically represent spatial properties. While
2
The current implementation of CDC solves all of the
sample problems that appear in the paper in a fraction of a
second (on an 2GHz IBM T2500 with 1GB of RAM). The
complete source code along with a machine-readable test
suite of numerous problems, including these examples, can
be obtained by contacting the authors.
QUALITATIVE SPATIAL REASONING VIA 3-VALUED HETEROGENEOUS LOGIC
81
there may be several attributes in general, in prac-
tice there is often only one attribute of interest. In
this case, as in many others, this attribute is location,
which here consists of a pair of numeric coordinates
that locate each object on a two-dimensional grid.
A system state is a function σ that maps each ob-
ject s
i
to a finite and non-empty set of attribute values.
As a simple example, suppose we have three objects
s
1
, s
2
, and s
3
, to be located on a 2 × 2 grid. Then a
system state σ might map s
1
to (1,1), s
2
to (2,1), and
s
3
to (1,2):
σ(s
1
) = {(1,1)};
σ(s
2
) = {(2,1)};
σ(s
3
) = {(1,2)}.
(1)
We can depict σ diagrammatically as follows:
s
1
s
3
s
2
Such a state is called a world, because it maps each
object to a unique attribute value, in this case to a
unique location.
3
Thus a world provides a maximal
amount of information: it gives the precise attribute
values (e.g., the precise locations) of all objects. Of-
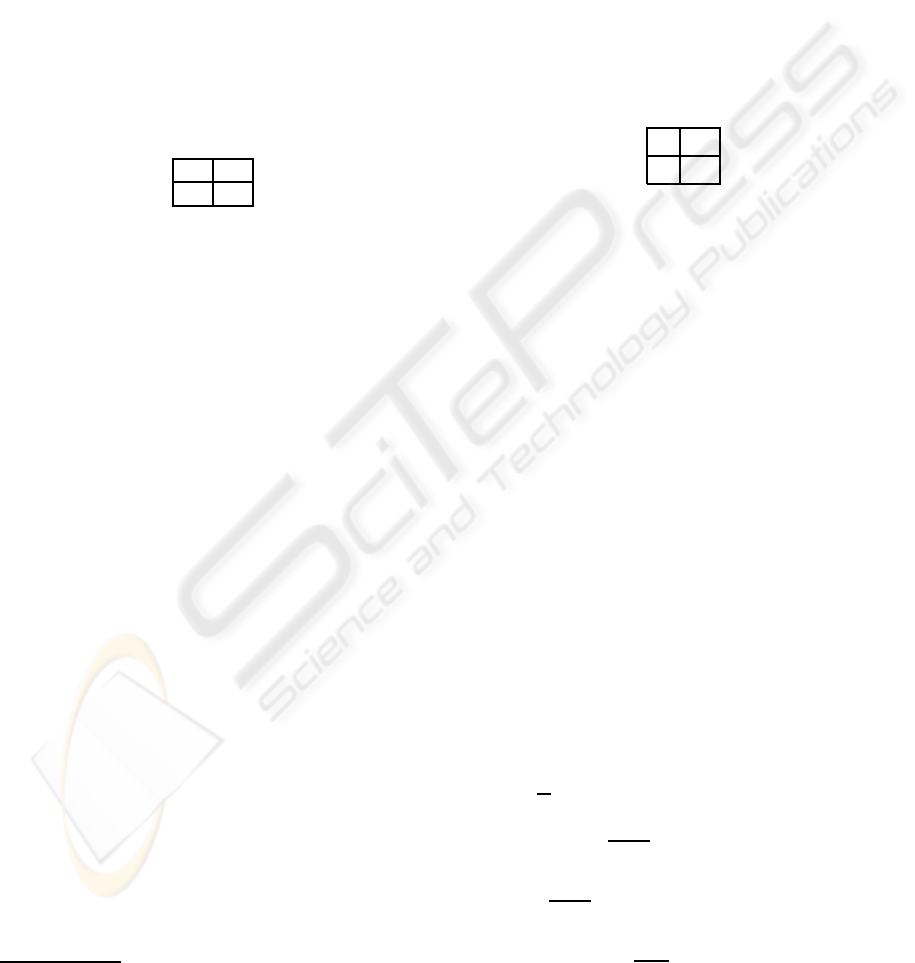
tentimes, however, we do not know exact attribute
values. For instance, we might know the precise loca-
tion of s
1
(say, (2,2)), but for s
2
and s
3
we might only
know that they are both on the top row, but without
knowing their exact positions. That would be cap-
tured by the following state:
σ(s
1
) = {(2,2)};
σ(s
2
) = σ(s
3
) = {(1,1),(1,2)}.
(2)
In the extreme case, we might have no information
whatsoever about the locations of any of the objects:
σ(s
1
) = σ(s
2
) = σ(s
3
) = {(1,1),(1,2),(2, 1), (2,2)}.
So that is why states map objects to finite sets of
attribute values, rather than single attribute values.
Since set membership is disjunctive, this provides us
with a technically convenient device for dealing with
incomplete information. Moreover, the finiteness re-
quirement ensures that we can encode the content of
a state with a finite disjunction. For instance, state (2)
can be represented by the CNF formula
loc(s
1
,(2, 2)) ∧ [loc(s
2
,(1, 1)) ∨ loc(s
2
,(1, 2))]
∧ [loc(s
3
,(1, 1)) ∨ loc(s
3
,(1, 2))],
where the literal loc(s
i
,l) has the obvious meaning.
Any state σ can be straightforwardly encoded by a
CNF formula F
σ
.
3
Technically, each object is mapped to a singleton, but it
is convenient to treat worlds as if they map objects directly
to values.
Let σ
1
, σ
2
be system states. We say that σ
2
is an
extension of σ
1
, written σ
2
⊑ σ
1
, iff σ
2
(s
i
) ⊆ σ
1
(s
i
)
for every i = 1,.. .,N. If σ
2
⊑ σ
1
and σ
1
6⊑ σ
2
, then
σ
2
is a proper extension of σ
1
, written σ
2
⊏ σ
1
. Thus,
if σ
2
⊑ σ
1
then F
σ
2
subsumes F
σ
1
.
Note that oftentimes system states can (and
should) be depicted diagrammatically. This is possi-
ble even in the presence of partial information (i.e.,
when the state is not a world), if we only intro-
duce appropriate abstraction tricks and correspond-
ing diagram-parsing conventions. For instance, if we
place a question mark in a location to indicate that we
do not know which object appears there, while an un-
occupied location is simply left blank, then state (2)
can be depicted as follows:
? ?
s
1
The pervasive use of such diagrams is a distinguishing
aspect of our approach. Indeed, in our work “system
state” and “diagram” are used synonymously.
Let us now describe the syntax of the underly-
ing logic. First, every object s
i
is given a name
c
i
, and indeed for many purposes the objects can be
identified with their names. A term is either an ob-
ject name c
i
or else a variable v. (To keep these
apart, variables and constants start with lower- and
upper-case letters, respectively.) Atomic sentences
are of the form
(
R t
1
·· ·t
k
)
, where R is a relation
symbol of arity k and t
1
·· ·t
k
are terms. There are
also negations
(not
p
)
, conjunctions and disjunc-
tions
(and/or
p
1
·· · p
k
)
, conditionals and bicondi-
tionals
(if/iff
p
1
p
2
)
, and universal and existen-
tial quantifications
(forall/some
v
1
·· · v
k
p
)
.
A specific system is largely determined by the
stock of available relation symbols and their mean-
ing. More precisely, to define a QSR system by this
methodology, one must choose
1. a set of object attributes (as we remarked, a single
attribute location suffices in many cases); and
2. a finite set of relation symbols R , and their inter-
pretations.
The interpretation of a symbol R ∈ R is a computable
relation R on some attributes (typically on location).
Thus, for instance, supposing that
left
is a binary
relation symbol,
left
would be a binary relation on
locations, defined, e.g., as follows:
left
((r
1
,c
1
),(r
2
,c
2
)) ≡ c
1
< c
2
.
Then an atom such as
(left B C)
will be true in a
given state σ iff the left relation definitely holds be-
tween all possible locations that σ assigns to the ob-
jects named
B
and
C
. (Recall that a state might map
KEOD 2009 - International Conference on Knowledge Engineering and Ontology Development
82

an object to multiple locations.) Thus, e.g., assuming
that
A
,
B
, and
C
are the names of the objects s
1
, s
2
,
and s
3
, respectively, the atom
(left B C)
is true in
world (1), as s
2
is definitely to the left of s
3
in that
state. Likewise,
(
R t
1
·· ·t
k
)
will be false in a state σ
iff R fails for all possible attribute values that σ as-
signs to the objects named by t
1
,. ..,t
k
. Thus, e.g.,
(left A B)
is false in state (1). But if R holds for
some of these values and fails for others, then the truth
value of
(
R t
1
·· ·t
k
)
is unknown—the third value of
the 3-valued semantics. Thus, e.g., the truth value of
(left B C)
is unknown in state (2), because it is true
if s
2
assumes the location (1,1) and s
3
assumes the
location (1, 2), but false if s
2
is assigned to (1,2) and
s
3
to (1,1). Given such interpretations for the rela-
tion symbols, any sentence p can be compiled into an
equivalent formula F
p
in propositional logic (in the
context of the inference problems described below).
Let us be more precise. Recall that a term t is
either a constant name c or a variable v. Thus, to eval-
uate a term t, i.e., to find out which system object it
denotes, we need two pieces of information: a map-
ping from variables to objects, and a mapping from
constants to objects. The mapping from constants to
objects is usually fixed once and for all in the begin-
ning of the session with the system. For any constant
name c, we write c for the system object denoted by
it through this initial mapping, e.g.,
A
= s
1
,
B
= s
2
,
C
= s
3
. A variable mapping is a total function χ from
the set of variables to the set of objects. Given such a
mapping χ, the denotation of a term t is written as t
χ
,
and is defined as follows: If t is one of the constants,
c, then t
χ
= c; and if t is a variable v, then t
χ
= χ(v).
We write χ[v 7→ s
i
] for the mapping that assigns s
i
to
v and agrees with χ everywhere else.
We first define the truth value of any given sen-
tence w.r.t. a given world w and a given variable map-
ping χ, denoted V
w/χ
[p], as follows. Suppose first
that p is an atomic sentence. If p is an identity
(=
t
1
t
2
)
, then p is true iff t
χ
1
= t
χ
2
. For non-identities,
V
w/χ
[
(
R t
1
·· ·t
k
)
] is defined as follows:
true if R(w(t
χ
1
),... ,w(t
χ
k
));
false otherwise.
For non-atomic p, V
w/χ
[p] is defined in accor-
dance with the strong 3-valued Kleene scheme, e.g.,
V
w/χ
[
(and
p
1
p
2
)
] is true iff both V
w/χ
[p
1
] and
V
w/χ
[p
2
] are true; false if one of them is false; and
unknown otherwise. Universal and existential quan-
tifications are desugared into conjunctions and dis-
junctions, respectively.
A knowledge base is a finite set of sentences β.
A context is a pair γ = (β,σ) consisting of a knowl-
edge base β and a system state (diagram) σ. The fol-
lowing specifies the key notion of logical entailment
in this framework: A world w satisfies a sentence p
w.r.t. a variable mapping χ iff V
w/χ
[p] = true. This
is denoted by writing w|=
χ
p. Likewise, w satisfies a
system state σ, written w |= σ, iff w ⊑ σ. We say that
w satisfies a context γ = (β,σ) w.r.t. a given χ, writ-
ten w|=
χ
(β,σ), iff w|=
χ
p for all p ∈ β and w |= σ.
A context γ entails a sentence p, written γ |= p, iff
w|=
χ
γ implies w|=
χ
p for every world w and vari-
able mapping χ. Finally, γ entails a system state σ,
written γ |= σ, iff w|=
χ
γ implies w |= σ for all w and
χ.
With this background, we can describe the two
types of inference supported in our framework as fol-
lows:
1. Theorem proving: Given a context γ, determine
whether or not
• a sentence p follows from γ; or
• a state σ
′
follows from γ.
2. Model finding: Given a context γ, find a model
for it, if one exists, or else report inconsistency.
The system should be able to find as many distinct
models for γ as possible.
For theorem proving, we encode the given context
γ as a CNF formula F
γ
, and check the satisfiability
of F
γ
∧ A ∧ ¬F
p
or that of F
γ
∧ A ∧ ¬F
σ
′
, where A is
a canonicity axiom that will be discussed later. For
model-finding, we simply look for satisfying interpre-
tations for F
γ
∧ A .
We stress that grid-based numeric locations are
not a necessary feature of this methodology. Loca-
tions could be data values of an arbitrary type, e.g., the
thirteen relative regions of the Double-Cross Calculus
(Freksa, 1992) determined by an arbitrary origin and
relatum. Then a system state might map an object s
i
to a set of “locations” such as {left-front,right-back}.
3 DEFINITION OF CDC
To define CDC in accordance with the preceding
schema, we need to (a) specify the object attribute(s),
and (b) specify the relation symbols and their inter-
pretations. There is only one attribute, location, so for
(a) we only need to specify the type of locations used
in CDC. These will be cells on a two-dimensional
grid. In particular, letting R and C denote the num-
ber of rows and columns of the grid, respectively,
4
we identify a location with an ordered pair (i, j) with
4
Both dimensions of the grid (R and C) are adjustable
parameters in our implementation; they can take any posi-
tive values.
QUALITATIVE SPATIAL REASONING VIA 3-VALUED HETEROGENEOUS LOGIC
83

1 ≤ i ≤ R and 1 ≤ j ≤ C. We write L for the set of all
locations, namely, {(1,1),. .. ,(R,C)}. The top row
and leftmost column are row 1 and column 1, while
the bottom row and rightmost column are row R and
column C, respectively. Thus, a system state here is a
function
σ : {s
1
,. ..,s
N
}→ [P (L ) \ {
/
0}]
that assigns a non-empty set of locations to every sys-
tem object.
For part (b): CDC has 24 relation symbols, 15
of which are binary, 8 are ternary, and one is unary.
The unary relation is
middle
;
(middle
t
)
holds
iff the object denoted by t is located at the cen-
ter of the absolute reference system. The follow-
ing are the binary relations:
north
,
south
,
east
,
west
,
north-west
,
north-east
,
south-west
,
south-east
,
above
,
below
,
left
,
right
,
diag
,
adjacent
, and
same-location
. In addition, there
is the equality symbol:
(=
s t
)
iff s and t denote the
same object. The ternary relations are those of the
flip-flop calculus (
ff-right
,
ff-left
,
ff-front
,
ff-back
,
ff-inside
,
ff-start
,
ff-end
), and an
extra ternary relation
between
.
We now come to the interpretations of these sym-
bols. For each symbol R, R is a relation of the same
arity on L . Thus, for instance,
above
is a binary re-
lation on L . Specifically,
above
((r
1
,c
1
),(r
2
,c
2
)) iff
r
1
< r
2
. We illustrate with the interpretations of a few
more of the binary primitives:
west
((r
1
,c
1
),(r
2
,c
2
)): r
1
= r
2
and c
1
< c
2
adjacent
((r
1
,c
1
),(r
2
,c
2
)): [r
1
= r
2
and
|c
1
− c
2
| = 1] or [c
1
= c
2
and |r
1
− r
2
| = 1]
The interpretations of the rest should be obvious. The
only somewhat tricky case is
diag
, which holds for
positions that are located diagonally.
For the base relations of the flip-flop calculus, we
transform locations (r,c) into Cartesian coordinates
(x,y), where x = c and y = R − r + 1. Then, given
an origin (r
1
,c
1
), a relatum (r
2
,c
2
), and a referent
(r
3
,c
3
), with Cartesian coordinates (x
1
,y
1
), (x
2
,y
2
),
and (x
3
,y
3
), respectively, we compute the slope and
constant of the line from the origin to the relatum, and
then determine the relative location of the referent by
analytic geometry. For instance, writing b?→ e
1
;e
2
for the conditional expression that denotes the value
of e
2
(e
3
) is b is true (false), the following interprets
ff-right:
ff-right((r
1
,c
1
),(r
2
,c
2
),(r
3
,c
3
)) ≡ (c
1
= c
2
)?→
[r
2
≤ r
1
?→ (c
3
> c
1
);(c
3
< c
1
)];
[(c
2
> c
1
)?→ y
3
< y
′
;y
3
> y
′
]
where y
′
= (slope· x) + constant,
slope = y
2
− y
1
/x
2
− x
1
,
and constant = y
1
− (slope· x
1
).
Finally, note that the semantics do not preclude
worlds in which multiple objects are in the same lo-
cation. In practice, our implementation rules out such
worlds by adding the following sentence to the global
knowledge base:
(forall x y
(if (same-location x y) (= x y)))
4 TRANSLATION TO SAT
Recall that N, R, and C are the numbers of objects,
rows, and columns, respectively. Our translation uses
two basic types of Boolean variables, location–i–r–c,
asserting that object i is in location (r, c), and eq–i–i
′
,
asserting that objects i and i
′
are identical. We de-
fine two additional variables in terms of location,
row–i–r and col–i–c, asserting that object i is in row
r and column c, respectively. There are, therefore,
N· R·C+ N
2
+N ·(R+C) variables. For greater read-
ability, we write variables of the form location–i–r–c
and eq–i–i
′
as location(i,(r,c)) and eq(i,i
′
), respec-
tively, and likewise for row and col. The following
axiom defines row:
N
^
i=1
"
R
^
r=1
row(i,r) ⇔
C
_
c=1
location(i,(r, c))
#
The definition of col is similar.
To weed out unintended models, we must ensure
that for every i ∈ 1,.. . ,N there is some l ∈ L such
that location(i,l); i.e., every object occupies some lo-
cation:
N
^
i=1
_
l∈L
location(i,l)
Furthermore, location must be univalent, i.e., no ob-
ject can occupy more than one location:
N
^
i=1
^
l∈L
location(i,l) ⇒
^
l
′
∈L \{l}
¬location(i,l
′
)
We also postulate the following two axioms formal-
izing the semantics of the identity relation:
"
N
^
i=1
eq(i,i)
#
and
N
^
i=1
^
j∈{1,...,N} \{i}
¬eq(i, j)
We write A for the conjunction of all of the above
KEOD 2009 - International Conference on Knowledge Engineering and Ontology Development
84

below
T
(s
i
,s
j
) =
R
^
x=1
"
row(i,x) ⇒
R
_
y=x+1
row( j,y)
#
ff-right
T
(s
i
,s
j
,s
k
) =
^
(l
1
,l
2
)∈ L
2
location(i,l
1
) ∧ location( j,l
2
) ⇒
_
l
3
∈R(l
1
,l
2
)
location(k,l
3
)
where R(l
1
,l
2
) = {l
3
∈ L | ff-right(l
1
,l
2
,l
3
)}
north-west
T
(s
i
,s
j
) =
above
T
(s
i
,s
j
) ∧
left
T
(s
i
,s
j
)
Figure 1: SAT translation of sample base relations.
axioms, including the definitions of row and col. By
an interpretation I we mean a function that assigns a
truth value to every atom of the form location–i–r–c
and eq–i–i
′
, i, i
′
∈ {1,.. .,N}, r ∈ {1,. .., R}, c ∈
{1,.. .,C}. We write I |= F, where F is a proposi-
tional formula over this set of variables, to mean that
I satisfies F, in the usual sense of propositional-logic
semantics. We say that an interpretation I is canon-
ical iff I |= A . We are only interested in canonical
interpretations.
A system state (diagram) σ can be encoded as a
propositional formula F
σ
as follows:
F
σ
=
N
^
i=1
_
l∈σ(s
i
)
location(i,l)
Alternatively—and more efficiently—we can encode
σ as the conjunction of all unit clauses that state where
an object cannot be. We can now define the main
translation function T that takes a sentence p and a
variable mapping χ and produces a formula in propo-
sitional logic (over the aforementioned set of vari-
ables) that captures the 3-valued-logic semantics of
p in a sense made rigorous by the theorem below. For
atoms, T (
(
R t
1
·· ·t
k
)
,χ) = R
T
(t
χ
1
,. ..,t
χ
k
), where R
T
is defined for some sample R in figure 1. Boolean
combinations are straightforward, e.g.,
T (
(and
p
1
p
2
)
,χ) = T (p
1
,χ) ∧ T (p
2
,χ),
and universal (existential) quantifications are reduced
to conjunctions (disjunctions), e.g.,
T (
(forall
v p
)
,χ)
is defined as the conjunction of all T (p,χ[v 7→ s
i
]) for
i = 1,... ,N.
For a knowledge base β and mapping χ, T (β,χ) =
{T (p, χ) | p ∈ β}. Note that the size of the clause set
for base relations is O(G
3
), where G is the size of the
grid (i.e., R·C).
Writing Sat[S] and UnSat[S] to mean that S is sat-
isfiable and unsatisfiable, respectively, we have:
Theorem 1.
Pick an arbitrary
χ
. Then:
(β,σ) |= p
iff
UnSat[{A ,F
σ
,¬T (p,χ)} ∪ T (β, χ)]
;
(β,σ) |= σ
′
iff
UnSat[{A ,F
σ
,¬F
σ
′
} ∪ T (β,χ)]
;
(β,σ)
has a model iff
Sat[{A ,F
σ
} ∪ T (β, χ)]
.
(We assume without loss of generality that sentences
in the abovetheorem are closed, i.e., haveno free vari-
ables. If one does, we can consider its universal clo-
sure instead, since the semantics ensure that the two
are equivalent.) This result completes the reduction
of CDC to SAT, and enables us to determine whether
an arbitrary sentence or diagram follows from the cur-
rent context. For a given inference problem, our im-
plementation carries out this propositional encoding
and then proceeds in three stages. First it translates
the produced formulas into CNF; it then translates the
CNF into DIMACS format; and it finally invokes a
SAT solver on the DIMACS input (currently RSat).
It should be noted that the reduction to SAT can be
carried out automatically not just for CDC but for any
QSR system adhering to the approach we have out-
lined in this paper, given the interpretations of its re-
lation symbols. We sketch out the relevant technique
below. Suppose for simplicity that there is only one
attribute (this is not an essential restriction), which, in
the context of a specific inference problem, can only
take values from a finite set A. Then we introduce
variables of the form att-i-v for i = 1,.. .,N, v ∈ A.
Now let R be an interpreted relation of arity k + 1,
k ≥ 0. Given values v
1
,. ..,v
k
∈ A, define the projec-
tion R↓(v
1
,. ..,v
k
) as follows:
R↓(v
1
,. ..,v
k
) = {v ∈ A | R(v
1
,. ..,v
k
,v)}.
Then we define R
T
(s
i
1
,. ..,s
i
k
) as follows:
^
(v
1
,...,v
k
)∈A
k
{att-i
1
-v
1
,. ..,att-i
k
-v
k
} ⇒
_
v∈R↓(v
1
,...,v
k
)
att-i
k+1
-v
QUALITATIVE SPATIAL REASONING VIA 3-VALUED HETEROGENEOUS LOGIC
85

This is essentially the same general scheme that was
used in the translation of CDC. (Derived attributes
such as row and col are convenient but inessential ab-
breviations.)
5 COMPARISON WITH
PREVIOUS APPROACHES AND
CONCLUSIONS
Historically, most of the work in QSR has stemmed
from and was heavily influenced by Allen’s calculus
(Allen, 1983). Although some important early work
was couched in first-order logic (Randell et al., 1992),
by and large, following Allen it has been widely
thought that an expressive reasoning framework for
QSR powered by a general-purpose inference proce-
dure would be infeasible. Accordingly, expressivity
and reasoning completeness have been sacrificed in
the interest of efficiency. With few exceptions, QSR
systems are couched as relation algebras, and reason-
ing in such systems is performed by CSP techniques
on networks of objects constrained by binary (or oc-
casionally ternary) base relations.
In the wake of the remarkable progress that has
been achieved in SAT-solving technology over the last
decade, this approach has become questionable. The
general-purpose reasoning provided by off-the-shelf
SAT-solvers is now powering systems that solve ex-
tremely demanding problems, not only in hardware
and software verification, but in AI as well (e.g., for
planning and scheduling). That QSR could also stand
to benefit from this progress is suggested by the fol-
lowing observation: The reasoning required in many
practical QSR applications is model-based, dealing
with a finite set of objects (regions, points, lines, time
intervals, or arbitrary objects in a scene), each hav-
ing a finite number of possible spatial-attributevalues.
Therefore, one can retain first-order logic and still
achieve decidability through propositionalization, by
restricting the universe of discourse to the set of ob-
jects in question and then deciding entailment through
off-the-shelf SAT solvers.
By comparison to the CSP tradition, the approach
we have suggested in this paper can offer the follow-
ing advantages:
1. Increased expressivity: The full expressive power
of first-order logic is available, allowing for much
more natural modeling of spatial information.
Anything that could be modeled with relational
constraints can be expressed in first-order logic,
but the converse is not true. Many problems
that could not be solved—or even expressed—in
pure constraint-based calculi can be directly for-
mulated and solved in the present setting. The
furniture-arrangementproblem from section 1, for
instance, is beyond the reach of current QSR sys-
tems, but it is readily formulated and solved in
CDC.
2. Higher level of abstraction: In the present ap-
proach there is no need to compute transitivity ta-
bles or to devise or modify path-consistency al-
gorithms. These are laborious processes—often
left unfinished for many systems–that are neces-
sitated largely by the idiosyncrasies of the un-
derlying reasoning mechanism. When defining a
QSR system in our approach, one can focus on the
purely logical aspects of the primitive relations
and relegate the reasoning to the SAT solver. It
is also not necessary to require the primitive rela-
tions of the system to be JEPD (jointly exhaustive
and pairwise disjoint), a requirement that can have
somewhat awkward modeling consequences (see
footnote 1).
3. Built-in mechanisms for dealing with incomplete
spatial knowledge: The semantics of the present
framework are based on an intuitive new 3-valued
logic that is particularly apt for modeling incom-
plete spatial information. We have shown how to
compile these semantics into propositional logic.
4. Extensibility: New dimensions of spatial repre-
sentation and reasoning can be incorporated with
relatively little effort. The relative-orientation
primitives of the flip-flop calculus, for instance,
were added to the cardinal-direction primitives of
Frank’s calculus in less than two hours. By con-
trast, combining these two systems in a constraint-
based algebraic setting was a major research chal-
lenge that by itself merited publication (Isli et al.,
2001). Similar systems could be implemented for,
e.g., topological inference.
5. Orthogonal efficiency improvements: Progress
in SAT-solving technology is rapid, and should
translate into corresponding efficiency gains for
SAT-based QSR systems.
6. Prominent role for diagrams: Diagrams play a
crucial role in spatial cognition, but so far they
have been largely absent from QSR systems,
which are usually entirely algebraic, even though
QSR is recognized as “especially suited for appli-
cations that involve interaction with humans, as
they provide an interface based on human spatial
concepts” (Wallgr¨un et al., 2006, p. 39). The
system we have presented can accept diagram-
matic input, including incompletely specified di-
agrams, and can also present output diagrammat-
KEOD 2009 - International Conference on Knowledge Engineering and Ontology Development
86

ically. Moreover, the underlying framework pro-
vides a general formal notion of diagrams.
7. Heterogeneous proofs: In addition to automat-
ing reasoning tasks such as model-finding and
theorem-proving, the present framework allows
for proofs that express spatial reasoning.
5
These
are given in a heterogeneous framework that is
specifically designed to combine visual and sym-
bolic reasoning. None of the present systems al-
low for proofs, let alone heterogeneous proofs.
Nevertheless, proofs are not only interesting in
their own right, but they could also play an impor-
tant role in human-machineinteraction, since they
can serve as explanations of spatial reasoning.
In the near future we plan to integrate additional
spatial primitives (particularly topological ones); im-
prove the efficiency of the SAT encoding; pursue
additional optimizations (e.g., cache the canonicity
clauses after the first translation, instead of reencod-
ing them on every query); and evaluate the system’s
performance on a wider range of problems.
REFERENCES
Allen, J. F. (1983). Maintaining knowledge about temporal
intervals. Communications of the ACM, 26(11):832–
843.
Arkoudas, K. and Bringsjord, S. (2009). Vivid: An
AI Framework for Heterogeneous Problem Solv-
ing. Artificial Intelligence. In press, doi:10.1016/
j.artint.2009.06.002.
Frank, A. U. (1991). Qualitative Spatial Reasoning with
Cardinal Directions. In Kaindl, H., editor, Proc. 7th
Austrian Conference on Artificial Intelligence, pages
157–167. Springer.
Freksa, C. (1992). Using Orientation Information for Quali-
tative Spatial Reasoning. In Frank, A. U., Campari, I.,
and Formentini, U., editors, Theories and methods of
spatio-temporal reasoning in geographic space, pages
162–178. Springer.
Isli, A., Haarslev, V., and M¨oller, R. (2001). Combining
cardinal direction relations and relative orientation re-
lations in Qualitative Spatial Reasoning. Technical
Report FBI-HH-M-304/01, Fachbereich Informatik,
Universit¨ot Hamburg.
Ligozat, G. F. (1993). Qualitative triangulation for spatial
reasoning. In Frank, A. U. and Campari, I., editors,
Spatial Information Theory. A Theoretical Basis for
GIS. European Conference, COSIT’93, volume 716 of
LNCS, pages 54–68. Springer.
5
We have not had space to cover that aspect of the sys-
tem here, but we discuss it in detail elsewhere (Arkoudas
and Bringsjord, 2009).
Randell, D. A., Cui, Z., and Cohn, A. G. (1992). A spatial
logic based on regions and connection. In Proceedings
of the Third International Conference on Knowledge
Representation and Reasoning, pages 165–176.
R¨ohrig, R. (1997). Representation and Processing of Qual-
itative Orientation Knowledge. In Proceedings of the
21st Annual German Conference on Artificial Intelli-
gence, volume 1303 of LNCS, pages 219–230.
Wallgr¨un, J. O., Frommberger, L., Wolter, D., Dylla, F., and
Freksa, C. (2006). Qualitative Spatial Representation
and Reasoning in the SparQ-Toolbox. In Barkowsky,
T., Knauff, M., Ligozat, G., and Montello, D. R., edi-
tors, Spatial Cognition, volume 4387 of Lecture Notes
in Computer Science, pages 39–58. Springer.
QUALITATIVE SPATIAL REASONING VIA 3-VALUED HETEROGENEOUS LOGIC
87
