
AN OPTIMAL SILVICULTURAL REGIME MODEL USING
COMPETITIVE CO-EVOLUTIONARY GENETIC ALGORITHMS
Oliver Chikumbo
Scion, Private Bag 3020, Rotorua, New Zealand
Keywords: Dynamical models, State space representation, Pontryagin’s maximum principle, Genetic algorithms, Island
model.
Abstract: A competitive co-evolutionary genetic algorithm was successfully employed to determine an optimal
silvicultural regime for the South African Pinus patula Schl. Et Cham. The solution to the silvicultural
regime included: initial planting density; frequency, timing and intensity of thinnings; final crop number;
and rotation length. The growth dynamics for P.patula were estimated using dynamical models, the building
blocks of the combined optimal control and parameter selection formulation, with a single objective
function that was maximised for value production. The results were compared against a silvicultural regime
determined using Pontryagin’s Maximum Principle. Both the regimes were then compared against the
recommended silvicultural regime determined from years of experimental trials. The genetic algorithms
regime was superior to the other two.
1 INTRODUCTION
A plantation forest is an investment for goods
(entities with a market value) and services (entities
important to our livelihood with no market value
yet). The trees that grow on it are harvested for their
timber or retained for other values, which may be
conflicting and incommensurable, such as carbon
sequestration, biodiversity, water quality, water
quantity, and so on. For example, since biomass
increases with stand age, postponing harvesting to
the age of biological maturity may result in the
formation of a large carbon sink but delayed income
for harvestable trees. Stand level information is vital
for understanding the flow and extent of goods and
services over a forest estate or region. To
simultaneously satisfy conflicting and
incommensurable values for a forest stand requires
an understanding of forest stand dynamics and how
responsive these dynamics are to management
controls and different physical environmental
characteristics.
This paper looks at a decision framework that
determines a management control for optimising the
value of a stand, which in this case only looks at
maximising value for timber. The thinking behind
this development is that if we can identify a decision
framework that determines a management control
for a single value, it may be less of an effort to
extend the framework to include more values. The
management control actions are time-dependent and
include choosing the appropriate initial planting
density, when to thin (timing), how much to thin
(intensity), how often to thin (frequency), final crop
number prior to clear-felling and rotation length.
However, determining optimality for economic
value for a forest stand is elusive, partly because of
the difficulty in simulating and forecasting growth
dynamics of a forest stand, price of harvested
timber, and costs of haulage and harvesting. For
instance, if a forest stand is harvested too soon then
the price of timber fetched may not be enough to
cover the costs of harvesting. On the other hand, if
harvesting is delayed for too long then the mature
trees may not be growing fast enough to justify their
occupation of the land (Mesterston-Gibbons, 1995).
1.1 Methods Employed
Mathematical models and techniques are the default
for simulation, forecasting and optimisation. Most
invariably, the conveniency of models introduces a
jumble of consequences i.e., the decision-making
process based on the outcomes of simulation,
forecasting and optimisation, may actually be
210
Chikumbo O. (2009).
AN OPTIMAL SILVICULTURAL REGIME MODEL USING COMPETITIVE CO-EVOLUTIONARY GENETIC ALGORITHMS.
In Proceedings of the International Joint Conference on Computational Intelligence, pages 209-217
DOI: 10.5220/0002314202090217
Copyright
c
SciTePress

simplified but with complications that may range
from problem formulation to handling large
computations. For an economic value of a forest
stand there are two dominant dynamic trends that
may be modelled, i.e., growth and economic
dynamics. Both dynamics may be integrated into an
optimisation formulation such that optimal initial
stand density, thinning strategy (i.e. frequency,
timing and intensity of thinning), final crop number
and rotation length may be predicted. Due to the
time-dependent and multi-stage nature of the
optimisation problem, dynamic programming
(Bellman, 1957) has been employed to the task
where net present value of the harvested timber was
maximised (Yin and Newman, 1995). Chen et al.,
(1980) gave a generic formulation of this modelling
approach and pointed out to its weaknesses that
included inappropriate growth models and the pesky
“curse of dimensionality”, which meant an inability
to do an exhaustive search. The same weaknesses
were reiterated by Arthaud and Pelkki (1997),
Arthaud and Warnell (1994), Filius and Dul (1992),
Pelkki (1994), Pelkki and Arthaud (1997).
Another approach employed by many to maximise
the economic value of a forest stand, involves
determining silviculturally sound stand strategies
using simulation models. A financial analysis based
on net present value is then applied to the strategies.
The strategy with the highest net present value is
then chosen as the optimum (Kuboyama and Oka,
2000). Such an approach may mean sub-optimal
outcomes because the silvicultural and financial
decisions are made independently. It also severely
limits the outcomes that may be simulated and there
is no way of telling how close or far away the tried
outcomes are from the “true” optimal outcome.
More recently, other analysts have tackled this forest
stand problem using discrete-time dynamical models
for simulating the growth dynamics and
Pontryagin’s Maximum Principle (PMP), for an
exhaustive search, averting the curse of
dimensionality (Chikumbo et al., 1997, Chikumbo
and Mareels, 2003). Discrete-time dynamical
models, commonly used in systems engineering, are
based on a common axiom that the current
observation at time t is dependent on the previous
observation at time t-1for a first-order model (Ljung
1987). This means that dynamical models are
expressed in terms of orders of magnitude of their
previous values. The choice for using discrete-time
dynamical models in this type of formulation is that
their mathematical structure has linear parameters
that control shape and scale of a variable trend,
making it easier to reflect change in the dynamics of
the trend, where the parameters themselves are a
function of control actions (Chikumbo et al., 1999).
A combined optimal control and parameter selection
formulation made it possible to estimate the initial
stand density (one parameter), final crop number
(another parameter), thinning strategy (optimal
control) and the rotation length of a forest stand.
Therefore, the problem was transformed into a
terminal constraint problem by specifying the final
crop number in the formulation. As a result the
formulation became sensitive to terminal time,
making it possible to determine the optimal rotation
length. The terminal time was determine by
incrementing the rotation length in small yearly
steps and solving the problem, until ill-conditioning
made it impossible to solve the problem. Therefore,
determining the terminal time was never a case of
the model being “clever” enough to know when to
terminate a rotation, but rather sensitive to the
terminal time obtained through a trial and error
exercise identify the optimal rotation length.
In general, the task of designing and implementing
algorithms for the solution of optimal control
problems is a nontrivial one(Anderson and Moore,
1989; Michalewicz, 1999). This is because the
optimal control problems are quite difficult to deal
with numerically and therefore many dynamic
optimisation programs available for general users
are typically an offspring of static packages (Brooke
et al., 1988) or forward recursive heuristics
(Chikumbo, 1996). Only recently are genetic
algorithms being applied to optimal control
problems in a systematic way (Michalewicz et al.,
1992).
1.2 Genetic Algorithms
In this paper the author ups the ante to solve the
combined optimal control and parameter selection
problem using a competitive co-evolutionary genetic
algorithm (GA). Such an approach has many
advantages in that, unlike PMP, which is calculus-
based and therefore dependent on the restrictive
requirements of continuity and derivative existence
of functions, a GA uses payoff (objective function)
information, making it robust, as in, a wider problem
domain application (Goldberg 1989). Because
derivatives are not a feature of a GA, the
formulation lends itself to greater flexibility in
defining the objective function or multiple
objectives. The organisation of this paper is outlined
here. Data description is brief and is followed by a
AN OPTIMAL SILVICULTURAL REGIME MODEL USING COMPETITIVE CO-EVOLUTIONARY GENETIC
ALGORITHMS
211

section with the models that were used for the
control design, viz., state equations. The
optimisation criterion is then defined and the results
of the GA optimisation presented and discussed in
the context of the PMP results and currently
recommended silvicultural strategies for the South
African P. patula. In the final section conclusions
are drawn and further work indicated.
2 DATA
The re-measurement data used for developing the
discrete-time dynamical models came from Pinus
patula Schl. et Cham., correlated curve trend
spacing trials, Nelshoogte, Transvaal, South Africa.
Detail of the spacing trials and how the data were
prepared for model development may be found in
Chikumbo and Mareels (1995). A theoretical
economic aggregate was used in the formulation
because of lack of data. The economic aggregate
was based on stumpage, the maximum price that a
competitive buyer is willing to pay for harvested
timber, less the expected costs in harvesting and
haulage. Theory has it that a forest plantation
increases in stumpage value with time and follows a
sigmoidal trend, its slope increasing up to an
inflection point (Chikumbo, 1996). This was easily
represented as a second-order dynamical model with
an asymptotic limit of one. Using real world data
will only change the two time constants and
asymptotic limit of the second-order dynamical
model, retaining the characteristic signature of the
stumpage trend (Chikumbo and Mareels, 2003). The
thinking therefore, is that the theoretical stumpage
model will influence the control model in a similar
way as a realistic one.
3 STATE EQUATIONS
Discrete-time dynamical models were used to
represent the state of the forest stand (which is the
system) and included, the stand basal area model
(Chikumbo et al., 1999), average height function
(Chikumbo, 1996) and the economic aggregate
model (Chikumbo and Mareels, 2003). Application
of dynamical models to forest growth is not new and
has been demonstrated in the last 15 years
(Chikumbo et al., 1992).
The optimisation was designed as a state space
representation (Ljung, 1987) where the input was the
management control action (to be estimated) that
influenced the dynamics of the forest stand
(represented by the state equations or dynamical
models) with an output that was represented by a
volume function (Chikumbo, 1996) as shown in
Figure 1.
The state equations were as follows:
sph(t) = sph(t − 1) − u(t)
(1)
sba(t) = a
1
(sph(t − 1))
sba(t − 1) + … b
1
(sph(t − 1))
(2)
ht(t) = a
2
(sph(t − 1)) ht(t − 1) + …
b
2
(sph(t − 1)) d
q
(t − 1)
(3)
stpge(t) = a
3
stpge(t − 1) + a
4
stpge(t − 2)… +
b
3
(1 − a
3
− a
4
)
(4)
a
1
(y) = 0.93 + 0.01 y − 0.047 y
2
+ 0.01 y
3
(5)
a
2
(sph(t)) = 0.782,
for sph(t)
≥
1000 … stems ha
−1
(6)
= 0.85,
for 1000 > sph(t)
≥
…
400 stems ha
−1
= 0.913,
for 400 > sph(t)
≥
… 124 stems ha
−1
a
3
= 1.566
(7)
a
4
= −(a
3
)
2
/4
(8)
b
1
(y) = 2.32 + 4.24y − 0.0035y
2
(9)
b
2
(sph(t)) = 0.19 + 0.03y,
for sph(t)
≥
… 1000 stems ha
−1
(10)
= 0.095 + 0.05y,
for 1000 >… sph(t)
≥
400 stems ha
−1
= 0.035 + 0.1y, for 400 > …
sph(t)
≥
124 stems ha
−1
b
3
= 1
(11)
y = sph/1000 (for scaling purposes)
(12)
where,
d
q
= quadratic mean diameter in centimetres.
The parameters of equations (2) and (3), i.e., a
1
, a
2
,
b
1
and b
2
were depended on the initial/residual stand
density, making them responsive to changes in
growth dynamics before and after thinning
(Chikumbo et al., 1999).
IJCCI 2009 - International Joint Conference on Computational Intelligence
212

Figure 1: State space representation of the forest stand model, where, t = time in years; sba = stand basal area in m
2
ha
−1
; ht
= stand mean height in metres; stpge = dimensionless stumpage; u = number of trees harvested in stems ha
−1
; and sph =
initial or residual stand density in stems ha
−1
.
The stand volume function was conveniently
developed to fit into a quadratic objective functional
formulation and was as follows:
V(t) = 0.4047 sba(t) ht(t)
(13)
where,
V = stand volume in m
3
ha
−1
.
4 PARAMETER SELECTION
AND OPTIMAL CONTROL
FORMULATION
Let J
n
(u) be defined as the maximum achievable
total volume over n periods. Thus
J
n
(u) =
max
u ( t )
u(t)
sph(t)
t =T −( n−1)
T
∑
[0.4047sba(t)ht(t)]
(14)
subject to the constraints, t
≥
T-(n-1) with upper and
lower bounds on the control,
0 ≤ u(t) ≤ 200,∀t ∈ [t
0
,T ] . To bias this cost
functional to maximize harvested volume and
revenue J
n
(u) becomes:
J
n
(u) = max
u (t )
u(t)
sph(t)
t= T −(n −1)
T
∑
[ 0.4047sba(t)ht(t)]...
sba(t)
sph(t)
stpge(t)
(16)
For n = 1,
J
1
(u) = max
u (T )
u(T )
sph(T )
[ 0.4047sba(T )...
ht(T )]
sba(T )
sph(T )
stpge(T )
(17)
that is, we have a single constrained static
optimisation problem that can be solved, if u(T) =
sph(T), hence
J
1
(u) = [ 0.4047sba(T )ht(T )]
sba(T )
sph(T )
stpge(T ).
Clearly at the final period, a total harvest has to be
done. The importance of the harvest is still
undetermined as this is a function of all previous
control actions.
Consider n = 2 and
J
2
(u) = max
u (T −1)
u(T
−
1)
sph(T − 1)
[ 0.407sba(T − 1)...
ht(T − 1)]
sba(T − 1)
sph(T − 1)
stpge(T − 1) + ...
u(T )
sph(T )
[ 0.4047sba(T )ht(T )]
sba(T )
sph(T )
stpge(T )
(18)
and so on, until n = T+1 and the original problem
has been solved. This is the method of dynamic
programming, sometimes called backwards
induction. Adding the parameter selection constraint
for the initial planting density and final crop number,
900
≤
z
(1)
≤
1900
(19)
200
≤
z
(2)
≤
300
(20)
where,
z(1) = initial planting density (in stems ha
-1
),
and
z(2) = final crop number (also in stems ha
-1
),
makes the computation cumbersome. However, the
above problem was solved using PMP such that the
first-order necessary condition for optimality would
be satisfied because of the inclusion of the
Hamiltonian in PMP (Dixon, 1972; Chikumbo and
Mareels, 2003). Note that PMP and dynamic
programming are essentially the same (Fan and
Wang, 1964) although PMP achieves an exhaustive
search by breaking the problem into a sequence of
sub-problems that are approximated by a constrained
nonlinear programming problem, solved by standard
AN OPTIMAL SILVICULTURAL REGIME MODEL USING COMPETITIVE CO-EVOLUTIONARY GENETIC
ALGORITHMS
213

mathematical programming algorithms (Teo et al.,
1989). In this case NLPQL (Schittkowski, 1985), a
sequential quadratic programming algorithm for
solving constrained nonlinear programming
problems, was used to solve the combined optimal
control and parameter selection problem. A set of
explicit functions and their derivatives with respect
to the state, control and parameters need to be
supplied to solve the problem.
Note that there is no known method of determining
the global maximum (or minimum) for the general
nonlinear programming problem. Only when the
objective function and the constraints satisfy certain
properties, is the global optimum sometimes found
(Michalewicz, 1999).
5 THE GENETIC ALGORITHM
MODEL
Genetic algorithms (GA) are engineering techniques
that mimic chromosomal metaphors and population
dynamics for solving optimisation problems, in
particular combinatorial ones. For the combined
optimal control and parameter selection problem the
chromosomal data structure (as shown in Figure 2)
was designed in such a way that the first gene was a
fixed age 0 for when the planting occurs. The
second, third and fourth genes were age ranges in
years, 6-8, 12-15, and 18-20, respectively for
determining the timing of thinnings. The fifth gene
was the terminal time for the rotation length with a
range of 25-44 years. The sixth gene was the initial
planting density representing z(1) as in equation
(19). The seventh, eighth and ninth genes were the
thinning intensities with ranges 0-300, 0-200, and 0-
200 stems ha
-1
, respectively. They corresponded to
the age ranges in the second, third and fourth genes.
The fitness function was the same as in equation
(16). For the genetic operators to produce legitimate
offspring at all times (for efficiency), specialized
recombination and mutation operators were chosen
that maintained the order of the genes. Therefore,
the problem became a permutation one.
The crossover was a discrete integer-valued
recombination that performed an exchange of the
integer values between the chromosomes. For each
position the parent chromosome that contributed its
integer value to the offspring was chosen randomly
with equal probability. The mutation process that
randomly altered populations, involved taking the
current population and producing the same number
of randomly initialized integer valued chromosomes.
Figure 2: The chromosome structure used in the
competitive co-evolutionary GA formulation.
To guard against premature convergence, 5
subpopulations of 100 individuals each were
evolved independently in an unrestricted migration
topology (where individuals/chromosomes may
migrate from any subpopulation to another) that saw
exchange (or migration) of genetic material at
every10 generation-interval over a 1000 generation-
period. This multi-population formulation is
sometimes referred to as an island model (Levine,
1994) and happens to be a convenient model for
parallel implementation, important for very large
problems where computation time may be critical.
The selection process was all that differentiated the
5 subpopulations and all else kept the same. Three
selection processes were used that is, stochastic
universal sampling, tournament selection, and
roulette wheel selection (Pohlheim, 2006). The
roulette wheel selection did not seem to perform
well and ultimately only two selection processes
were utilised amongst the 5 subpopulations.
Competition between the subpopulations was
enabled such that the size of a subpopulation was
made dependent on the current success of that
subpopulation, hence the name, competitive co-
evolutionary genetic algorithms. Successful
subpopulations received more resources and less
successful ones transferred resources to where they
were most likely to generate the greatest benefit. The
cycle of events in each generation is shown in Figure
3 although migration and competition selection were
set to occur 10 generation-intervals.
Computation time is always an issue for some, but
for this combined optimal control and parameter
selection problem, it was solved under 3 minutes on
an iMac 2.16 GHz Core 2 Duo with 2 GB SDRAM.
6 RESULTS AND DISCUSSION
The PMP algorithm provided a solution for a 44-
year rotation period with all the upper and lower
IJCCI 2009 - International Joint Conference on Computational Intelligence
214
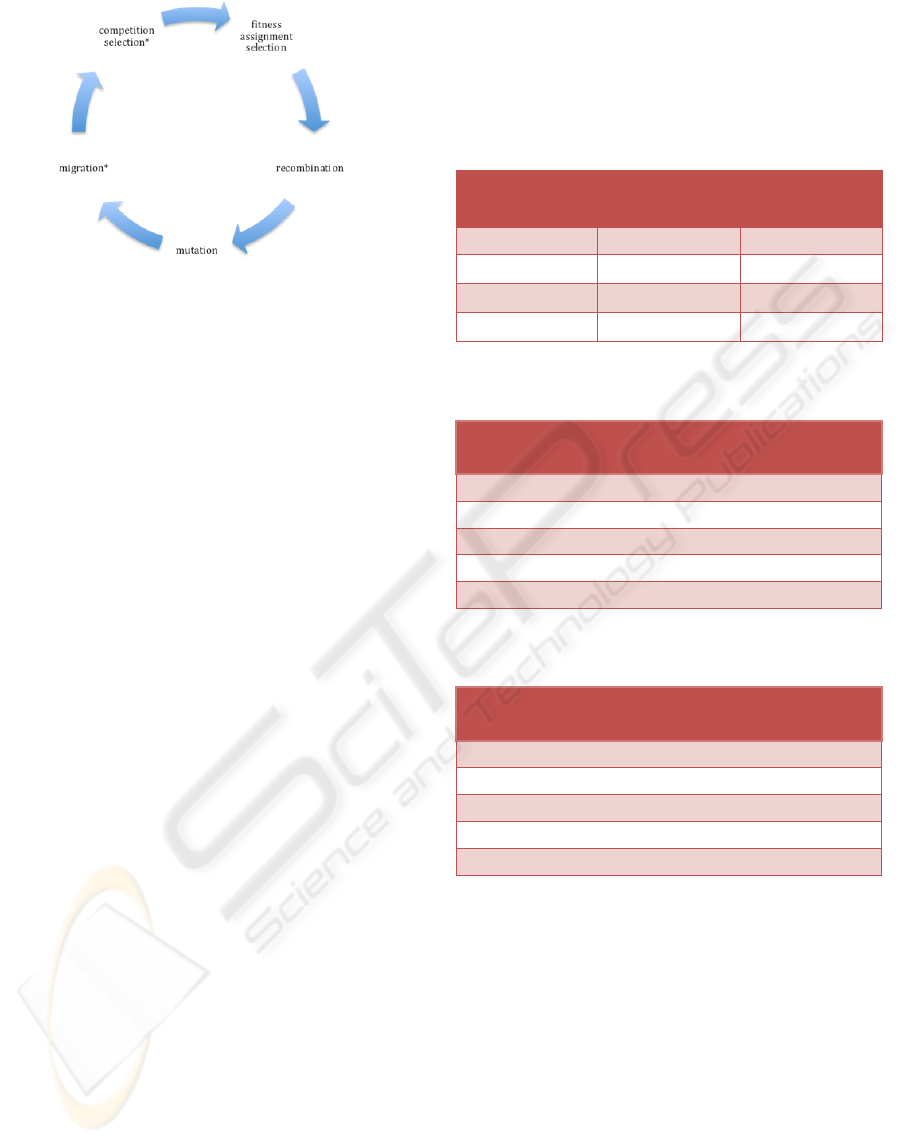
Figure 3: The structure of a competitive co-evolutionary
genetic algorithm. The processes marked with an asterisk
take place after every 10 generations.
control points set as follows:
0 ≤ u(t) ≤ 200,∀t ∈ [0,44] . The turnaround time of
the execution was under 3 minutes similar to the GA
one. The upper and lower control bounds for the
PMP formulation could not be replicated for the GA
formulation without problems as it meant a
numerous amount of “illegal chromosomes” being
generated. To make such a formulation for the GA
to work, where the chromosome is the control vector
for the whole rotation, with the first gene being the
initial planting density, would have meant including
a “repair algorithm” that would have been costly in
computation time. Also such a formulation would
have made it hard to determine the optimal rotation
length given that the chromosomes had a fixed
length. Messy GAs (Goldberg 1993) can handle
chromosomes of different lengths but are beyond the
scope of this paper. They are able to evaluate the
best building blocks from modestly sized
populations of longer chromosomes, thereafter
cutting down the string length by throwing off the
genes of lesser importance. Design calculations are
performed for population sizing, selection-deletion
timing, and genetic thresholding. One could say this
is where the strength of PMP really shows because
of the availability of the derivatives of the dynamic
system, the PMP will still behave, regardless of the
upper and lower bounds on the control vector
(within reason of course).
The GA being a heuristic needed a rethink in the
design of the chromosome and from a 44-gene
structure to a mere 9-gene chromosome produced
remarkable results. It is evident here that although
the PMP formulation is efficient (providing the
functions of the dynamics of the system are smooth
and differentiable to the second derivative), a
cleverly designed chromosome can be equally
efficient. Tables 1-3 show the silvicultural results
from the PMP formulation, the recommended
silvicultural regime from the Department of
Forestry, South Africa (Kassier, 1991), and from the
competitive co-evolutionary GA, respectively.
Table 1: The silvicultural regime derived from the PMP
formulation.
AGE (years)
Standing trees
(stems ha
-1
)
Control (stems ha
-1
-u(t))
0 1000
21 600 (400)
33 200 (400)
44 0 (200)
Table 2: The recommended silvicultural regime, Dept., of
Forestry, South Africa.
AGE (years)
Standing trees
(stems ha
-1
)
Control (stems ha
-1
-u(t))
0 1372
8 650 (722)
13 400 (250)
18 250 (150)
25+ 0 (250)
Table 3: The silvicultural regime derived from the
competitive co-evolutionary GA.
AGE (years)
Standing trees
(stems ha
-1
)
Control (stems ha
-1
-u(t))
0 906
6 624 (282)
15 454 (170)
20 252 (198)
31 0 (252)
Although the PMP silvicultural regime in Table 1
might be optimal, it somewhat raises questions as to
whether it can be implemented successfully.
Planting 1000 stems ha
-1
and trying to retain them
until the age of 21 years for a first thinning, creates
competition, for light, water and soil nutrients that
will ultimately lead to suppressed growth and
mortality. In production forestry thinning is
designed as a control action in advance of
competition in order to reduce mortality. Also a final
crop number of 200 stems ha
-1
at a late age of 33
years maintained until age 44, may mean less growth
gains because the rate of crown expansion and
growth vigour at those ages would be approaching
or would have reached asymptotic limits (Oliver and
Larson, 1990).
AN OPTIMAL SILVICULTURAL REGIME MODEL USING COMPETITIVE CO-EVOLUTIONARY GENETIC
ALGORITHMS
215

The recommended silvicultural strategy in Table 2
looks like it is well thought without the pitfalls of
the PMP-derived one. The negatives of the strategy
is that starting off with an initial planting of 1372
stems ha
-1
would be more expensive and the first
thinning at age 8 years of 722 stems ha
-1
seems
excessive, which may mean a higher risk of stem
damage for the residual trees. The final crop of 250
stems ha
-1
may be harvested any time from age 25
years.
The GA strategy in Table 3 seems to be the most
intuitive one. This is because the initial planting
density of 906 stems ha
-1
would cost comparatively
less than the other two strategies. The thinnings at
all ages are therefore, not as excessive as in the other
two cases, especially in the first thinning where it is
only 282 stems ha
-1
. The final crop number is the
same as the one for the recommended strategy.
Given that the final thinning is at age 20 years, there
is certainly still some growth vigour at that age for
the residual trees, to take advantage of growing
space, nutrients and water. A clearfell at age 31
years would in no doubt guarantee larger logs that
will command a high premium.
Therefore, the strategies from Tables 2 and 3 look
similar, although the GA manages to improve
recommendations that are based on analysis of years
of field experimental trials of P. patula in many
parts of South Africa. As for the PMP-derived
strategy, the state equations may need more state
equations such as a mortality function, in order
hanging on to too many trees for too long which
would induce competition and ultimately mortality.
The use of a mortality function in a PMP
formulation for finding an optimal silvicultural
strategy was found to be critical in highly productive
sites for the Australian Eucalyptus nitens. It was
demonstrated that the PMP formulation predicted a
lower initial planting density so as to limit high
mortality rates (Chikumbo and Mareels, 2002).
7 CONCLUSIONS
Given the growth dynamics of a forest stand and an
economic aggregate, a combined optimal control and
parameter selection model may be formulated that
will predict an optimal harvesting strategy, initial
stand density, final crop number and the rotation
length. Though a dimensionless economic aggregate
(stumpage) was used in the formulation, it still
represented the expected sigmodal or second-order
dynamics reminiscent of real world trends for
stumpage. The GA generated results that were
comparable to the one recommended by the South
African Department of Forestry. On close analysis
the GA results seemed to show a more practical
harvesting strategy than the PMP-derived one. The
PMP formulation may need another state equation
such as a mortality function in order to predict
harvesting strategies that are more practical. Future
work will involve multi-objective optimisation were
more values (other than just economics) will be
taken into consideration for finding a number of
non-dominated solutions, the Pareto-optimal set
(Horn 1997). The GA has become established as the
method at hand for exploring the Pareto-optimal
front in multi-objective optimisation problems
(Zitler et al., 2000).
REFERENCES
Anderson, B.D.O., and Moore, J.B. (1989), Optimal
Control: Linear Quadratic Methods, prentice-Hall
International Editions, Engelwood Cliffs, NJ 07632.
Arthaud, G.J., and Pelkki, M.H. (1997), Exploring
enhancements to dynamic programming, Seventh
Symposium on Systems Analysis in Forest Resources,
USDA For. Serv. North Central Research Station,
General Technical Rpt. NC-205, ed. Sessions, J., pp.
337-342.
Arthaud, G.J., and Warnell, D.B. (1994), A comparison of
forward-recursion dynamic programming and A* in
forest stand optimisation, Management Systems for a
Global Economy with Global Resource Concerns, eds.
Sessions, J. & Brodie, J.D., Pacific Grove, California.
Bellman, R.E. (1957), Dynamic Programming, NJ,
Princeton University Press.
Brooke, A., Kendrick, D., and Meeraus, A. (1988),
GAMS: A User’s Guide, The Scientific Press.
Chen, C.M., Rose, D.W., and Leary, R.A. (1980), How to
formulate and solve optimal stand density over time
problem for even-aged stands using dynamic
programming, General Technical NC-56, St. Paul,
MN:USDA Forest Service, North Central Forest
Experiment Station.
Chikumbo, O. (1996), Applicability of dynamical
modeling and theoretical control methods in tree
growth prediction and planning, PhD thesis, The
Australian National University, Canberra, ACT,
Australia.
Chikumbo, O., and Mareels, I. M. Y. (2003), Predicting
terminal time and final crop number for a forest
plantation stand: Pontryagin’s Maximum Principle,
Ecosystems and Sustainable Development, eds. Tiezzi,
E., Brebbia, C.A., and Uso, J.L., WIT Press, ISBN 1-
85312-834-X, 2:1227-1237.
Chikumbo, O., and Mareels, I. M. Y. (2002), Impact of
tree mortality in optimal control and parameter
selection problems in forest stand management,
IJCCI 2009 - International Joint Conference on Computational Intelligence
216

Development and Application of Computer
Techniques to Environmental Studies IX, eds.
Brebbia, C.A., and Zannetti, P., WIT Press, ISBN 1-
85312-909-7, pp 309-317.
Chikumbo, O., and Mareels, I. M. Y. (1995), Optimal
thinning strategies based on dynamical models and the
maximum principle, Application of the New
Technologies in Forestry, eds., Bren, L. and
Greenwood, C., Ballarat, Victoria, Institute of
Foresters of Australia, 1:239-245.
Chikumbo, O., Mareels, I. M. Y., and Turner, B.J. (1999),
Predicting stand basal area in thinned stands using a
dynamical model, Forest Ecology and Management,
116(1999): 175-187.
Chikumbo, O., Mareels, I. M. Y., and Turner, B.J. (1997),
A stand optimization model developed from
dynamical models for determining thinning strategies,
Seventh Symposium on Systems Analysis in Forest
Resources, eds. Vasievich, J.M., Fried, J.S. and
Leefers, L.A., Traverse City, MI. Gen. Tech. Rep. NC-
205. St. Paul, MN: U.S. Department of Agriculture,
Forest Service, North Central Research Station, pp.
355-360.
Chikumbo, O., Mareels, I. M. Y., and Turner, B.J. (1992),
Integrating the Weibull into a dynamical model to
predict future diameter distributions, Integrating
Forest Information over Space and Time, eds., Wood,
G.B., and Turner, B.J., The Australian National
University, ANUTECH Pty Ltd., pp 94-102.
Dixon, L.C.W. (1972), Nonlinear Optimisation, The
English Universities Press Ltd., Bell & Ban Limited,
Glasgow, UK.
Fan, L.T., and Wang, C.S. (1964), The Discrete Maximum
Principle, A Study of Multistage Systems
Optimisation, New York, John Wiley & Sons.
Filius, A.M., & Dul, M.T. (1992), Dependence of rotation
and thinning strategy on economic factors and
silvicultural constraints: results of an application of
dynamic programming, Forest Ecology and
Management, 48:345-356.
Goldberg, D. E. (1989), Genetic Algorithms in Search,
Optimisation and Machine Learning, Addison Wesley
Longman, Inc., University of Alabama
Goldberg, D.E., Deb, K., Kargupta, H., and Harik, G.
(1993), Rapid, Accurate Optimization of Difficult
Problems Using Fast Messy Genetic Algorithms,
Proceedings of the Fifth International Conference on
Genetic Algorithms, Morgan Kaufmann, pp 56-64.
Horn, J. (1997), Evolutionary computation applications:
Multicriterion decision making, Handbook on
Evolutionary Computation, eds., Back, T., Fogel, D.B.
and Michalewicz, Z., Bristol, Institute of Physics
Publishing and Oxford, New York: Oxford University
Press, pp 9-15.
Kassier, H.W. (1991), Revised thinning policy for
softwood sawlog production, Unpublished addendum
to Forest Management Instruction No 1/3/1,
Department of Water Affairs and Forestry, South
Africa pp. 18.
Kuboyama, H., and Oka, H. (2000), Climate risks and age-
related damage probabilities - effects on the
economically optimal rotation length for forest stand
management in Japan, Silva Fennica, 34(2):155-166.
Levine, D. (1994), A parallel genetic algorithm for the set
partitioning problem, PhD thesis, Mathematics and
Computer Science Division, Argonne National
Library, Argonne, IL 60439.
Ljung, L. (1987), System Identification: Theory for the
User, Prentice-Hall Inc., Englewood Cliffs, NJ.
Mesterton-Gibbons, M. (1995), A Concrete Approach to
mathematical Modelling, Wiley-Interscience
Publication, John Wiley & Sons, Inc., 597p.
Michalewicz, Z. (1999), Genetic Algorithms + Data
Structures = Evolution Programs, 3
rd
Edn., Springer-
Verlag Berlin Heidelberg, New York.
Michalewicz, Z., Janikow, C., and Krawczyk, J. (1992), A
Modified Genetic Algorithm for Optimal Control
Problems, Computers & Mathematics with
Applications, 23(12): 83-94.
Oliver, C.D., and Larson, B.C. (1990), Forest Stand
Dynamics, Biological Resource Management Series,
McGraw-Hills Inc., USA.
Pelkki, M.H. (1994), Exploring the effects of aggregation
in dynamic programming,
Management Systems for a Global Economy with Global
Resource Concerns, eds. Sessions, J. & Brodie, J.D.,
Pacific Grove, California.
Pelkki, M.H. & Arthaud, G.J. (1997), Exploring
enhancements to dynamic programming, Seventh
Symposium on Systems Analysis in Forest Resources,
eds. Fried, J., Leefers, L., and & Vasievich, M.,
General Technical NC-205, St. Paul, MN:USDA
Forest Service, North Central Forest Experiment
Station, pp. 337-342.
Pohlheim, H. (2006), Evolutionary Algorithms: Overview,
Methods and Operators, GEATbx: Introduction,
www.geatbx.com.
Schittkowski, K. (1985), NLPQL: A FORTRAN
subroutine for solving constrained nonlinear
programming problems, Annals of Operations
Research, 5:485-500.
Teo, K.L., Wong, K.H., and Goh, C.J. (1989), Optimal
maintenance of a system of machines with the weakest
link dependence performance, Optimal Control
Methods and Application, 10:113-127.
Yin, R. and Newman, D.H. (1995), Optimal timber
rotations with evolving prices and costs revisited,
Forest Science, 41:477-490.
Zitzler, E., Deb, K., and Thiele, L. (2000), Comparison of
multi-objective evolutionary algorithms: empirical
results, Evolutionary Computation 8(2): 173-195.
AN OPTIMAL SILVICULTURAL REGIME MODEL USING COMPETITIVE CO-EVOLUTIONARY GENETIC
ALGORITHMS
217
