
INTERACTIVE EVOLUTIONARY DESIGN OF MOTION VARIANTS
Jonathan Eisenmann
Computer Science & Engineering, The Ohio State University, 2015 Neil Ave, Columbus, OH, U.S.A.
Matthew Lewis
Advanced Computing Center for the Arts & Design, The Ohio State University, 1224 Kinnear Rd, Columbus, OH, U.S.A.
Bryan Cline
Computer Science & Engineering, The Ohio State University, 2015 Neil Ave, Columbus, OH, U.S.A.
Keywords:
Animation, Evolutionary Graphics, Interaction Techniques.
Abstract:
This paper presents an intuitive method for novice users to interactively design custom populations of stylized,
heterogeneous motion, from one input motion clip, thus allowing the user to amplify an existing database of
motions. We allow the user to set up lattice deformers which are used by a genetic algorithm to manipulate
the animation channels of the input motion and create new motion variations. Our interactive evolutionary
design environment allows the user to traverse the available space of possible motions, presents the user with
populations of motion, and gradually converges to a satisfactory set of solutions. Each generated motion
sequence can undergo a motion filtering process subject to user-specified, high-level metrics to produce a
result crafted to fit the designer’s interest.
1 INTRODUCTION
The human visual system possesses acute pattern
recognition abilities which can expose unnatural qual-
ities in synthetic crowd animation if insufficient mo-
tion variation is present. Often times, crowd anima-
tions will also need to display particular meaningful
expressive qualities in order to set the mood for a
scene. The motions of crowd agents must not only be
diverse and expressive, but they also often need to ap-
pear visually coherent. Therefore a certain amount of
similarity between some of the individuals in a crowd
is desirable.
A common method for achieving variation within
a crowd consists of providing agents with a broad
library of motions to choose from, using behavioral
rules and blending between the motions as the agents
transition from one action to another. Behavioral se-
lection of motion clips from a library should achieve
good results if the library is large enough to provide
satisfactory variation. However, this method is not al-
ways feasible for a small studio without access to an
extensive library of motion clips or for a crowd ani-
mation with novel motion that cannot be motion cap-
tured. Furthermore, it does not provide an easy way
to tune the crowd motion to fit a particular style.
We have developed an interactive evolutionary de-
sign system that will help designers create a diverse
set of crowd motions that belong to a few families of
expressive motion and can be tailored to fit the de-
signer’s preferences. Our system generates a range
of motion variants using a single input motion. The
input can be in the form of keyframe animation se-
quences and motion capture data should work as well.
Therefore our method can not only be easily used to
amplify a small database of motion clips for crowd
animation but also as an aid in the ideation process in
motion development for a character.
The system alters the input animation via user-
defined free form deformations which reshape the an-
imation channels specifying the motion. Attributes
that control deformations act as genes within our de-
sign environment’s genetic algorithm. The resulting
population of motions can then be filtered using sev-
eral techniques described in this paper that enforce
a set of constraints. Physical constraints can be uti-
lized to define the physical properties of each motion.
The designer views these filtered motions at each gen-
eration to interactively determine the fitness of the
crowd members. Through continued interaction, the
127
Eisenmann J., Lewis M. and Cline B. (2009).
INTERACTIVE EVOLUTIONARY DESIGN OF MOTION VARIANTS.
In Proceedings of the International Joint Conference on Computational Intelligence, pages 127-134
DOI: 10.5220/0002320301270134
Copyright
c
SciTePress

designer can guide the population to one or more ar-
eas of the space of solutions which portray an inter-
esting and desirable set of emotions or expressions.
Interesting motions can be saved in a library for use
later in the design process or as part of the final set of
motions.
Our system also has the benefit of providing the
designer with not just static samples from a space
of possibilities, but also a neighborhood of similarity
around each motion that can be used to tweak a sin-
gle motion if desired. This flexibility is an improve-
ment over a static library of motion capture clips in
the same way that images produced by a procedural
shader are more flexible than a set of scanned images.
Motions generated by the system can be used to in-
spire animators with new movement ideas or stored
in a database for generating crowd animation.
2 RELATED WORK
Our approach draws from previous work in areas
ranging from genetic algorithms to motion variation
techniques and crowd design methods.
Interactive evolutionary design, unlike many ge-
netic algorithm applications, lets the user interac-
tively determine the fitness of the evolved solutions.
Sims applied this technique to a wide array of ap-
plication areas, including procedural models and tex-
tures (Sims, 1993). In the application area of char-
acter animation Lim and Thalmann presented an in-
tuitive interface for searching through a design space
by selecting one from a pair of options in “tourna-
ment” style (Lim and Thalmann, 2000). Ventrella
introduced a physically-based animation and creature
design system that allows users to interactively deter-
mine fitness of individuals explicitly by altering fit-
ness functions as well as implicitly by selecting indi-
viduals of high fitness. His motion model consisted
of single DOF joints activated by parameterized sinu-
soidal functions for the sake of fast interactivity (Ven-
trella, 1995). We extend his novel work in this area
by introducing a flexible framework for generating
motion which allows for a wide range of expressive
motion.
There are a wide variety of ways to generate mo-
tion variation. Sung proposes a method for synthe-
sizing motion clips for crowd animation using motion
graphs (Sung, 2007). Amaya et al. use signal pro-
cessing techniques to embed varying emotions into a
neutral motion clip (Amaya et al., 1996). Chi et al.
introduce a system for modifying human motion us-
ing a Laban inspired effort and shape parameteriza-
tion (Chi et al., 2000). Neff and Fiume introduce a
method that uses both low-level and composite prop-
erties to edit character motion iteratively and interac-
tively (Neff and Fiume, 2005). Wang et al. present a
motion signal filter method for making a motion more
animated or cartoon-like (Wang et al., 2006). Gle-
icher has provided an extensive survey of constraint-
based motion editing techniques with particular atten-
tion paid to “per-frame inverse kinematics plus filter-
ing” techniques (Gleicher, 2001).
Crowd design has typically centered on the prob-
lems of navigation and behavioral patterns. For ex-
ample, Kwon et al. present a graph-based approach
for intelligently deforming group motion trajecto-
ries (Kwon et al., 2008). In addition, Treuille et al. in-
troduce a particle-based solution for crowd navigation
without the use of agent-based dynamics (Treuille
et al., 2006). Li and Wang have used interactive evo-
lutionary design to tune the parameters in a virtual
force based system (Li and Wang, 2007). Musse and
Thalmann created a real-time interactive system with
three methods for editing crowd behaviors (Musse
and Thalmann, 2001). Sung et al. presented an effi-
cient statistics-based scalable model for goal-directed
crowd behavior that can satisfy duration, orientation,
position, and pose constraints for individuals within
the crowd (Sung et al., 2005). Similarly, the crowd
simulation middleware in use today focuses mainly
on navigation and behavioral rules while relying on
extensive motion libraries to provide variation of mo-
tion (Massive Software, 2009). Time warping and
blending between actions selected by behavior mod-
els are a popular means of generating motion variation
in crowds.
Our method seeks to complement prior work in
this area by addressing the need that crowd design-
ers may have to craft the expressive motion of crowd
members. We choose to focus exclusively on gener-
ating the variety of expressive motion portrayed by
the crowd. We encourage use of our system in con-
junction with the existing methods for navigation and
behavior.
3 INTERACTIVE
EVOLUTIONARY DESIGN
There are often two types of designers involved in the
evolutionary design paradigm: the meta-designer and
the designer. The meta-designer defines the search
space by creating the original prototype to be altered
by the genetic algorithm. In our case this is a mo-
tion clip with parameterized deformers applied to it.
The meta-designer also defines which attributes are
adjustable and gives ranges to these attribute values.
IJCCI 2009 - International Joint Conference on Computational Intelligence
128

Figure 1: Interactive evolutionary design interface - the phe-
notypes are arranged in a grid for easy viewing and selection
with the mouse.
There must be enough meaningful attributes to pro-
vide a sufficiently rich search space for the algorithm
to traverse. The designer who directs the evolution
process will be able to explore solutions that exist in
the space defined by the meta-designer.
The technique described in this paper assumes that
a parametric model with a rich search space has al-
ready been designed. Problems in the field of para-
metric modeling are both challenging and interesting,
but they are beyond the scope of this paper. Further-
more, the solutions to parametric modelling problems
are typically domain specific. Bezirtzis, et al. have
given attention to some of the general concerns of
parametric search space design in their industrial de-
sign case study (Bezirtzis et al., 2007) with emphasis
on the fact that the design of a parametric space is
an iterative process that can only be verified empiri-
cally. In general, the areas of high fitness in a para-
metric search space for interactive evolutionary de-
sign should be much larger than those in typical non-
interactive evolutionary design applications. This is
due to the small number of individuals that can be
viewed in one population by the human visual sys-
tem and the low number of generations required for
convergence in a reasonable interactive environment.
Also, discontinuities or sharp features in the search
space should be avoided as much as possible. Other-
wise, the designer will find that slight changes in gene
values can result in dramatically different phenotypic
expression.
In our system the list of attributes belonging to the
parametric model corresponds to a genotype which is
represented by a fixed-length array of floating point
numbers (gene values). The phenotype in our sys-
tem is the motion produced when these gene values
are mapped to the model’s parameters. The designer
chooses a set of parents that will participate in the re-
production process for the next generation. Our ge-
netic algorithm chooses two distinct, random parents
from this set each time it produces a new offspring. It
copies the genes from one parent and then switches to
copying the other parent’s genes with a user-defined
crossover probability. The genes are then mutated
given a user-defined probability by adding a random
value between -1 and 1 scaled by a user-defined mu-
tation amount.
There are many variants on reproduction algo-
rithms for genetic search, and we are not married to
this particular algorithm. However, the ability to let
the user choose more than just two parents for the next
generation provides a very nice property for the evo-
lutionary design of crowd motions: The designer is
able to simultaneously engineer distinct subspaces of
motion for an entire crowd. Alternately, the designer
can save interesting motions from exploration of one
area of the search space into a motion library and can
reintroduce these motions later, when exploring other
areas of the search space. In addition, we encour-
age designers to explore different areas of the space
by using a functionality in our interface that allows
designers to backstep to previous generations and ex-
plore characteristics found in previously ignored parts
of the population. It is important to note that our sys-
tem cannot provide enough variation from one input
motion to create all the types of action that might be
required in a crowd scene. For example, it cannot turn
a walking motion into a sitting motion or vice versa.
Instead it provides varieties of walking motions that
can be placed in a motion clip library along with va-
rieties of sitting motions that were generated from a
separate input motion.
A designer cannot design just any particular pre-
conceived motion using our system. It will only be
possible to generate motions that exist in the avail-
able search space. Furthermore, if a designer has a
specific visual expressive quality in mind, it can often
be modelled more quickly using conventional meth-
ods. This system is more useful for discovering novel
motions and expressive qualities during exploration
of the search space. Interactive evolutionary design
has typically been aimed at aiding designers in the
ideation phase of development of a character or idea,
and the same applies here. Our system can be used
to craft a novel motion for an individual character or
a set of characters, but it may also serve as inspira-
INTERACTIVE EVOLUTIONARY DESIGN OF MOTION VARIANTS
129
tion in the planning stages of new character motion
development.
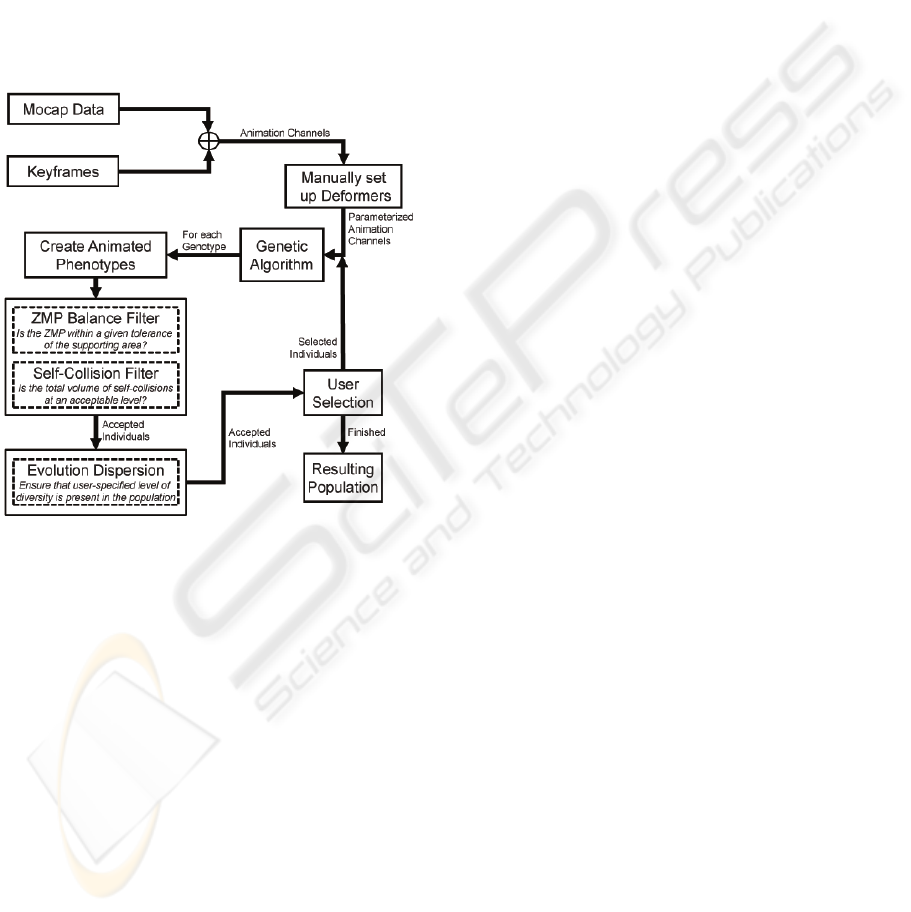
4 MOTION GENERATION
Our method requires interaction from the designer at
each iteration of the algorithm (see figure 2). We be-
gin by preparing the input motion for modification by
the genetic algorithm which, at the discretion of the
designer,sends the resulting motion through a number
of constraint-based filters and a dispersion algorithm.
Figure 2: Pipeline Overview.
4.1 Input
The underlying representation of our motion evolu-
tion system consists of the set of animation channels
taken from the input motion clip. We do not use
a simplified motion model based on sinusoidal sig-
nals or any other similar technique. Therefore our
system is not limited to cyclical motions, but can be
used to generate variants on any type of motion that
can be keyframed. Each animation channel is con-
verted to piecewise Bezier spline geometry based on
the data frames and their tangents. The meta-designer
sets up deformers (Sederberg and Parry, 1986) to al-
ter these splines and also defines which attributes of
the deformers can be changed by gene values from
the genetic algorithm. The splines are then altered by
these deformers during the evolutionary design pro-
cess. Once the spline geometry has been changed, the
information is then transferred back to the animation
channels of the individual being evolved. The result-
ing motion is displayed to the designer. We set the
system up this way so that any 2D deformation that
does not violate the one-to-one correspondence of the
function represented by the animation channels may
be applied, giving the meta-designer complete flexi-
bility in creating and controlling the space of possible
motions. See figure 3 for an example of how lattice
deformers can be applied to an animation channel.
Ideally, the parametric models produced via the
application of lattice deformers will provide a wide
range of variation with few problems. However, some
parameters may fight each other and occasionally lead
to unrealistic or undesirable results. We address this
by adding a layer of filters to the pipeline that auto-
matically detect problematic results above a tolerance
threshold and generate individuals to replace these
unacceptable phenotypes. Though it would be ideal to
correct these phenotypes, we choose to replace them
in the interest of faster interactivity. This will be dis-
cussed further below. These filters, though general in
some regards, should specifically apply to the type of
motion being generated. In our case, any number of
high-level qualities of locomotive animation can be
addressed here, but we choose to focus on two partic-
ular properties of motion where we have observed the
abuses of large variation: balance and self-collision.
4.2 Balance
In order to measure the level of balance in individual
phenotypes and decide if they are acceptable we have
adopted the zero moment point (ZMP) algorithm of
Tak et al. ZMP in dynamic motion analysis is sim-
ilar to the center of gravity in the static case. It is
defined as the point on the ground plane under a char-
acter where there is zero moment. In other words, if
this point were modeled as a joint between the char-
acter and the ground, there would be no actuation at
this joint. As a character moves, the ZMP will create
a trajectory over the ground plane.
Our balance filter ensures that the ZMP is always
within the character’s support area. The support area
is the convex hull of the contact area between the
feet and the floor. This definition encapsulates both
the single and double stance phases of bipedal mo-
tion and allows for seamless calculation between the
two phases. In some cases, the designer may want the
motion of individuals in the crowd to appear exag-
gerated or cartoon-like. In a case such as this, a pre-
cise balance constraint might cause more harm than
good. Therefore we have implemented the filter in
such a way that the designer has control over the al-
lowable balance error. We define balance error as the
IJCCI 2009 - International Joint Conference on Computational Intelligence
130
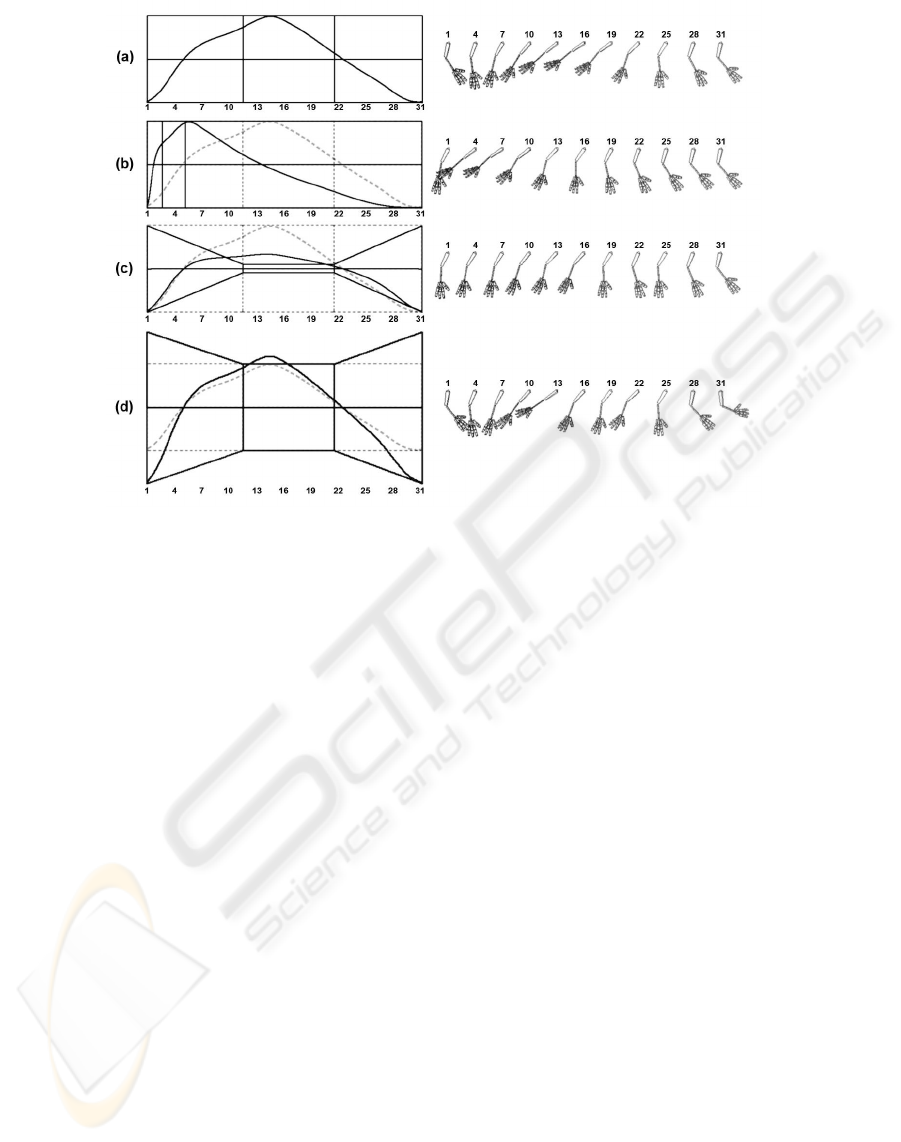
Figure 3: A variety of motions achieved using free form deformations on the rotation channels for the arm. Only the elbow
joint values are represented by the graphs, but the same deformations are being applied to the shoulder in the animation
sequence to the right. The X-axis of each lattice controls the passage of time (labeled in frames), and the Y-axis values control
the rotation angle of the joint at any point in time. The first curve and accompanying animation sketch represent the original
motion. Notice the lattice is in its initial, undeformed state.
distance from the ZMP to the closest point on the sup-
port area, and we sum this error over the entire motion
sequence.
F
∑
i=1
kZMP
i
− closestPoint(ZMP
i
, K · SA
i
)k (1)
F is the number of frames in the animation, ZMP
contains the zero moment point trajectory over all the
frames, and SA contains the support area hull over all
the frames. We also allow the user to enforce a lesser
or greater degree of balance on the entire sequence
by adding a custom support area scale factor K. The
value of K can be adjusted through the system’s inter-
face thus allowing the user to shrink the support area
to constrain the ZMP error more towards the center of
support if more stable motion is required.
4.3 Self-Collision
Since the variation of arbitrary animation channel at-
tributes may introduce self-collisions, we have devel-
oped a set of tests to filter out these self-colliding mo-
tions. We employ a simple bounding box method,
testing for overlap of world-aligned bounding boxes
and then calculate the volume of object aligned
bounding boxes if two links are found to be intersect-
ing. We then sum the volumes of all the intersections.
L
∑
j =1
L
∑
k =j+1
{volume(O
j
∩O
k
) | A
j,k
= 0, W
j
∩W
k
6=
/
0} (2)
L is the number of links or bones in the char-
acter, O contains the object-aligned bounding boxes
of the links, W contains the world-aligned bounding
boxes, and A is an adjacency matrix which describes
the spatial adjacency of the links. The above summa-
tion is accumulated over every frame of the motion
sequence. By summing the total volume we avoid
over-penalizing quick, grazing collisions while still
penalizing quick, high-volume collisions as well as
slow, grazing collisions. We ignore collisions that are
design artifacts of the given model’s geometry as well
as collisions between adjacent links. Since we do not
test at the polygon-polygon level for intersection in
order to reduce running time, this filter only serves as
a heuristic and not an exact measure of self-collision.
Nevertheless, in practice, it gives a good indication of
the level of self-collision for a given phenotype, espe-
cially since we want to keep computation to a mini-
mum in the interest of higher levels of interaction.
INTERACTIVE EVOLUTIONARY DESIGN OF MOTION VARIANTS
131

4.4 Replacement Method
It would be preferable to fix unacceptable phenotypes
and bring them back into the allowable space of mo-
tion defined by our balance and self-collision con-
straints. In fact, the method of Tak et al. optimally
transforms unbalanced animation sequences into bal-
anced motions (Tak et al., 2002). There are also meth-
ods for correcting self-colliding animation via inverse
kinematics optimization (M¨uller, 2004). However,we
do not attempt to fix unacceptable motions because
this would require an optimization process. Optimiza-
tion would introduce longer wait times between gen-
erations, reducing the interactivity of our evolutionary
design environment. Instead, we generate a new indi-
vidual motion to replace the old one and resubmit it
to the filters for evaluation. We are able to proceed in
this way because our space of possible motions was
created from a balanced original motion that was free
from self-collisions and so the rich search space of
variants will provide a viable, balanced replacement
motion within a few iterations. Furthermore, the re-
production process uses the user-selected motions as
input for any newly generated replacement motion so
the offspring will most likely have similar balance
and self-collision error to the parents’ errors. Even
so, generating replacement individuals with our re-
production algorithm may not always result in an ac-
ceptable individual, especially if the user’s constraints
are too restrictive or if the search space is not rich
enough. If this occurs, we let the replacement process
run for a user-defined maximum number of iterations
and then force it to move on, replacing the unbalanced
individual with the most balanced option found so far.
4.5 Diversity
Although duplicate motions in a crowd are harder to
spot than duplicate appearances, they can be spotted
just as easily whether or not each character has a dif-
ferent appearance. Moreover, varied motion between
two visually equivalent individuals can help to ob-
scure the fact that they havea similar appearance(Mc-
donnell et al., 2008). It follows that diversity of mo-
tion provides desirable qualities for crowd animation.
Genetic algorithms by their very nature seek conver-
gence to a specific area of the search space. Because
we want to design coherent sets of motion and be-
cause proximity in the search space corresponds to
phenotypic similarity in our system, this convergence
is beneficial. However, it can also be problematic
since we want to find a diverse group of motions. We
do not want the algorithm to converge so far that the
resulting population becomes homogenous. The de-
signer in the interactive evolutionary design paradigm
exercises ultimate control over how far the popula-
tion converges. As mentioned earlier, if the designer
chooses a variety of individuals as parents in one gen-
eration, the chances of diversity in the next generation
are greater.
In order to encourage diversity in the population
and ensure sufficient sampling of the local search
space surrounding the designer’s regions of interest,
we run the evolution dispersion algorithm introduced
by Marks et al. (Marks et al., 1997) at each genera-
tion. This algorithm alters the genes of individuals in
a way that will discourage similarity between pheno-
types. We measure the phenotypic difference between
two individuals by comparing their point clouds. Our
method is somewhat similar to the technique used by
Kovar, et al. in their paper on motion graphs (Kovar
et al., 2002). The point cloud for a character consists
of the positions of a subset of the character’s vertices
over time. We consider the distance between point
clouds to be the sum of the root mean squared error
between all the corresponding vertices of two point
clouds. We allow the designer to specify which parts
of the model to choose vertices from when making
this comparison. The designer can also specify the
level of dispersion required at each generation.
4.6 Using the Filters
Because the motion filters require extra computation,
using them will inevitably result in longer wait times
between generations. The balance and self-collision
filters are most useful during the first couple gener-
ations of the design process when the algorithm is
sampling a wide area of the search space. These fil-
ters make the designer’s job easier by avoiding the
areas of the search space where two or more param-
eters fight each other and produce unwanted motion
artifacts. As the design process progresses and the
algorithm begins to converge, these filters should be
turned off to speed up the interactivity of the system.
In contrast, the diversity filter should only be used
near the end of the design process when the algorithm
is sampling a smaller area of the search space. Using
the above filters in this way will maximize the fitness
of the options presented to the designer throughout
the process in a way that is customizable to fit the de-
signer’s needs.
5 RESULTS
We implemented our interactive evolutionary design
motion generation method in a layer of MEL and
IJCCI 2009 - International Joint Conference on Computational Intelligence
132

Python code over Autodesk’s Maya environment. We
chose to use Maya because it is flexible enough to
apply evolutionary design not only to animation, but
also to modeling, texturing, and special effects do-
mains. We also chose this software environment be-
cause most of the designers at our research facility are
familiar with its interface, and we would like them to
be able to create and evolve designs from their own
parametric models.
Table 1: Average time (sec) and average number of rejected
phenotypes while producing a generation of size 25.
Filter None Balance Collide Disperse
Time 10.0 76.0 47.8 28.0
Reject - 1.5 3.5 2
Our hardware consists of an Intel Xeon 2.66 GHz
cpu with 4 GB of RAM and an Nvidia Quadro FX
5600 graphics card. Performance metrics of our cur-
rent implementation under varying conditions can be
seen in Table 1. Each filter was set up with a max-
imum of 2 replacements per individual except for
the dispersion filter which had a maximum of two
replacements per population.The number of replace-
ments required at each generation depends on the
richness of the search space as well as on the de-
signer’s selections and the constraint thresholds set by
the designer. The time required to replace an individ-
ual that does not meet the constraints is approximately
equal to the time required to generate the original in-
dividual. The running time is dependent on the size
of the population so smaller populations will take less
time per individual.
For these tests, we created a parametric walk cy-
cle model with lattice deformers on 14 different an-
imation channels. Note, however, that any type of
deformer available in Maya may be utilized. The de-
formers’ transformations were controlled by 14 float-
ing point numbers from the fixed-length array that
formed the genotype of each individual. Although the
size of the population is adjustable by the user, we
generally use populations of size 25 because larger
populations are harder for the human visual system to
fully and easily comprehend. We are currently work-
ing to improvethe running times for the various filters
in the interest of better interactivity.
Figure 4 shows a sampling of the variety of mo-
tions that can be produced from a single parameter-
ized walk cycle. These motions are shown in an ani-
mation sketchbook style where every fourth frame is
drawn to show the change in form over time. We are
displaying the motions in animation sketchbook style
only for the purposes of the paper. In our evolutionary
design interface, the motions are actually displayed as
Figure 4: A variety of sixteen motions evolved from a single
walk cycle motion clip.
time-varying animation.
We have conducted a user study to determine if
our software truly provides an intuitive way for de-
signers to create varieties of motion. In this study we
asked three graduate students from the college of de-
sign who were already familiar with the Maya soft-
ware environment to participate. After a brief 10-
15 minute tutorial on how to use the system, each
designer explored the space of options provided by
the deformers in our parametric model of a walk cy-
cle motion and decided on a style of motion to in-
teractively develop. The entire process, including
the tutorial, search space exploration, and motion de-
sign took anywhere from an hour and a half to two
hours for each designer. The designers all felt that
the system was easy to learn and enjoyed experienc-
ing the interactive evolutionary design process. They
agreed that the motions produced would make for
interesting, varied background crowd character mo-
tions or as a fertile starting point for the develop-
ment of a character motion with an individualized
style. However, they said that the motion produced
would need to be refined with a high-level of con-
trol over specific keyframes if it were to be used for
foreground or hero characters. The populations they
created (See the animations on the project web site
at http://accad.osu.edu/Projects/Evo/) including a set
of energetic dancers, a group of feminine characters,
and a mob of zombies demonstrate the wide variety of
motions that are acheivable from just one input mo-
tion.
6 FUTURE WORK
There are many more ways to filter the individual mo-
tions that could prove to be helpful to the crowd de-
signer. A few such filters that could be useful in-
clude: joint torque analysis based on limits from a
comfort model (Ko and Badler, 1996), various meth-
INTERACTIVE EVOLUTIONARY DESIGN OF MOTION VARIANTS
133

ods of psychological analysis (aggressiveness, energy
level, coordination, etc.), Laban movement analysis
(effort and shape), as well as gender or age analysis.
We are investigating methods for implementing the
balance and self-collision filtering process in parallel
on subsets of the population using our quad-core pro-
cessors which should speed up computation times and
enhance the interactivity of the system.
7 CONCLUSIONS
Our method presents a novel approach to evolving
families of expressive motion, making it easier for a
crowd designer to quickly and intuitively find a satis-
fying combination of motion variations for a specific
application. This method could prove especially use-
ful to those who do not have access to motion capture
facilities or cannot afford to spend time capturing a
wide range of motion clips. Our interaction model al-
lows the user to view and make decisions about entire
generations at once, and our reproduction algorithm
allows for evolution of multiple (even mutually ex-
clusive) styles of motion simultaneously. Our use of
user-defined constraints plus the designer’s selections
as the determination of fitness exemplifies a hybrid
system that seeks to maximize the designer’s time and
attention in the evaluation of populations by filtering
out the individuals who do not meet the given criteria.
REFERENCES
Amaya, K., Bruderlin, A., and Calvert, T. (1996). Emotion
from motion. In Graphics Interface ’96, pages 222–
229.
Bezirtzis, B. G., Lewis, M., and Christeson, C. (2007). In-
teractive evolution for industrial design. In C&C ’07:
Proceedings of the 6th ACM SIGCHI Conference on
Creativity & Cognition, pages 183–192, New York,
NY, USA. ACM.
Chi, D., Costa, M., Zhao, L., and Badler, N. (2000). The
emote model for effort and shape. In SIGGRAPH ’00
Proceedings, pages 173–182, New York, NY, USA.
ACM Press/Addison-Wesley Publishing Co.
Gleicher, M. (2001). Comparing constraint-based motion
editing methods. Graphical Models, 63(2):107–134.
Ko, H. and Badler, N. I. (1996). Animating human locomo-
tion with inverse dynamics. Computer Graphics and
Applications, IEEE, 16(2):50–59.
Kovar, L., Gleicher, M., and Pighin, F. (2002). Motion
graphs. In SIGGRAPH ’02 Proceedings, volume 21,
pages 473–482, New York, NY, USA. ACM Press.
Kwon, T., Lee, K. H., Lee, J., and Takahashi, S. (2008).
Group motion editing. In SIGGRAPH ’08 Proceed-
ings, pages 1–8, New York, NY, USA. ACM.
Li, T.-Y. and Wang, C.-C. (2007). An evolutionary ap-
proach to crowd simulation. In Autonomous Robots
and Agents, pages 119–126.
Lim, I. S. and Thalmann, D. (2000). Tournament selec-
tion for browsing temporal signals. In Symposium on
Applied Computing ’00 Proceedings, pages 570–573,
New York, NY, USA. ACM.
Marks, J. et al. (1997). Design galleries: a general ap-
proach to setting parameters for computer graphics
and animation. In SIGGRAPH ’97 Proceedings, pages
389–400, New York, NY, USA. ACM Press/Addison-
Wesley Publishing Co.
Massive Software (2009). Massive prime. Accessed online
www.massivesoftware.com/prime/.
Mcdonnell, R., Larkin, M., Dobbyn, S., Collins, S., and
O’Sullivan, C. (2008). Clone attack! perception of
crowd variety. In SIGGRAPH ’08 Proceedings, vol-
ume 27, pages 1–8, New York, NY, USA. ACM.
M¨uller, A. (2004). Collision avoiding continuation method
for the inverse kinematics of redundant manipulators.
In Robotics and Automation ’04 Proceedings, vol-
ume 2, pages 1593–1598 Vol.2.
Musse, S. R. and Thalmann, D. (2001). Hierarchical model
for real time simulation of virtual human crowds. Vi-
sualization and Computer Graphics, IEEE Transac-
tions, 7(2):152–164.
Neff, M. and Fiume, E. (2005). Aer: aesthetic exploration
and refinement for expressive character animation. In
SCA ’05 Proceedings, pages 161–170, New York, NY,
USA. ACM Press.
Sederberg, T. W. and Parry, S. R. (1986). Free-form de-
formation of solid geometric models. SIGGRAPH ’86
Proceedings, 20(4):151–160.
Sims, K. (1993). Interactive evolution of equations for pro-
cedural models. The Visual Computer, 9(8):466–476.
Sung, M. (2007). Continuous motion graph for crowd sim-
ulation. In Technologies for E-Learning and Dig-
ital Entertainment, volume 4469, pages 202–213.
Springer Berlin / Heidelberg.
Sung, M., Kovar, L., and Gleicher, M. (2005). Fast and
accurate goal-directed motion synthesis for crowds. In
Symposium on Computer Animation ’05 Proceedings,
pages 291–300, New York, NY, USA. ACM Press.
Tak, S., Song, O.-Y., and Ko, H.-S. (2002). Spacetime
sweeping: An interactive dynamic constraints solver.
In Computer Animation ’02 Proceedings, pages 261–
271, Washington, DC, USA. IEEE Computer Society.
Treuille, A., Cooper, S., and Popovic, Z. (2006). Continuum
crowds. ACM Transactions on Graphics, 25(3):1160–
1168.
Ventrella, J. (1995). Disney meets darwin-the evolution of
funny animated figures. Computer Animation, 00.
Wang, J., Drucker, S. M., Agrawala, M., and Cohen, M. F.
(2006). The cartoon animation filter. ACM Transac-
tions on Graphics, 25(3):1169–1173.
IJCCI 2009 - International Joint Conference on Computational Intelligence
134
