
A COMPARATIVE STUDY OF NEIGHBORHOOD TOPOLOGIES
FOR PARTICLE SWARM OPTIMIZERS
Angelina Jane Reyes Medina
1
, Gregorio Toscano Pulido
2
and Jos
´
e Gabriel Ram
´
ırez Torres
3
CINVESTAV-Tamaulipas. Km. 6 carretera Cd. Victoria-Monterrey, Cd. Victoria, Tamaulipas, 87261, Mexico
Keywords:
Particle swarm optimization, Neighborhood topologies, Parameter setting.
Abstract:
Particle swarm optimization (PSO) is a meta-heuristic that has been found to be very successful in a wide
variety of optimization tasks. The behavior of any meta-heuristic for a given problem is directed by both: the
variation operators, and the values selected for the parameters of the algorithm. Therefore, it is only natural
to expect that not only the parameters, but also the neighborhood topology play a key role in the behavior
of PSO. In this paper, we want to analyze whether the type of communication employed to interconnect the
swarm accelerates or affects the algorithm convergence. In order to perform a wide study, we selected six
different neighborhoods topologies: ring, fully connected, mesh, toroid, tree and star; and two clustering
algorithms: k-means and hierarchical. Such approaches were incorporated into three PSO versions: the basic
PSO, the Bare-bones PSO (BBPSO) and an extension of BBPSO called BBPSO(EXP). Our results indicate
that the convergence rate of a PSO-based approach has an strongly dependence of the topology used. However,
we also found that the topology most widely used is not necessarily the best topology for every PSO-based
algorithm.
1 INTRODUCTION
The behavior of any meta-heuristic for a given pro-
blem is directed by both: the variation operators, and
the values selected for the parameters of the algorithm
(parameter setting). The parameter setting issue plays
a key role on the performance of any meta-heuristic.
Tuning well these parameters is a hard problem, since
they can usually take several values, and therefore, the
number of possible combinations is usually high.
Kennedy & Eberhart (Kennedy and Eberhart,
2001) proposed an approach called “particle swarm
optimization” (PSO) which was inspired on the cho-
reography of a bird flock. The approach can be seen
as a distributed behavioral algorithm that performs (in
its more general version) multidimensional search. In
the simulation, the behavior of each individual is a-
ffected by either the best local (i.e., within a certain
neighborhood) or the best global individual.
Several PSO proposals have been developed in or-
der to improve the performance of the original algo-
rithm (Kennedy, 2003; Kennedy and Eberhart, 2001;
Omran et al., 2008). Such approaches have shown
that the convergence behavior of PSO is strongly de-
pendent on the values of the inertia weight, the cog-
nitive coefficient and the social coefficient (Clerc and
Kennedy, 2002; van den Bergh, 2002). Other propo-
sals have sought to eliminate the dependence of such
parameters in order to avoid the parameter setting
problem. Investigations within the particle swarm
paradigm have found that the particles’ interconnec-
tion topology interact directly with the function be-
ing optimized (Kennedy, 1999). These studies have
shown theoretically that the neighborhood topology
affects (significantly) the performance of a particle
swarm and that the effect depends on the function.
Thus, some types of interconnection topologies can
work well for some functions, while the same topolo-
gies can present problems with other test functions
(Kennedy, 1999). Despite the key role that the topo-
logy plays in PSO, it has been barely studied.
The remainder of the paper is organized as fo-
llows: Section 2 provides an overview of PSO and
its variants used in this paper. Neighborhood topolo-
gies and clustering algorithms are presented in Sec-
tion 3. Section 4 presents and discusses the results of
the performed experiments. Finally, Section 5 shows
the concluding remarks and future work.
152
Jane Reyes-Medina A., Toscano Pulido G. and Gabr iel Ramírez-Torres J. (2009).
A COMPARATIVE STUDY OF NEIGHBORHOOD TOPOLOGIES FOR PARTICLE SWARM OPTIMIZERS.
In Proceedings of the International Joint Conference on Computational Intelligence, pages 152-159
DOI: 10.5220/0002324801520159
Copyright
c
SciTePress

2 PARTICLE SWARM
OPTIMIZATION
Particle swarm optimization (PSO) is an stochastic,
population-based optimization algorithm proposed by
Kennedy and Eberhart in 1995 (Kennedy and Eber-
hart, 1995), that simulates the social behavior of bird
flocks or school fish. In PSO, a swarm of parti-
cles fly through hyper-dimensional search space be-
ing attracted by both, their personal best position and
the best position found so far within a neighborhood.
Each particle represent a solution to the optimization
problem. The position of each particle is updated u-
sing equation (1) which is composed by the best po-
sition visited by itself (i.e. its own experience or y
in equation (2)) and the position of the best parti-
cle in its neighborhood determined by the commu-
nication topology used (Kennedy and Mendes, 2002;
Kennedy, 1999).
x
i j
(t + 1) = x
i j
(t) + v
i j
(t + 1), (1)
v
i j
(t + 1) = wv
i j
(t) + c
1
r
1 j
(t)(y
i j
(t) −x
i j
(t))
+ c
2
r
2 j
(t)(
b
y
i j
(t) −x
i j
(t)), (2)
for i = 1, ··· , s and j = 1, ··· , n
where w is the inertia weight (Shi and Eberhart,
1998), s is the total number of particles in the swarm,
n is the dimension of the problem (i.e. the number of
parameters of the function being optimized), c
1
and
c
2
are the acceleration coefficients, r
1 j
, r
2 j
∼ U(0, 1),
x
i
(t) is the position of particle i at time step t, v
i
(t)
is the velocity of particle i at time step t, y
i
(t) is the
personal best position of particle i at time step t, and
b
y
i
is the neighborhood best position of particle i at
time step t.
Empirical and theoretical studies have shown that
the convergence behavior of PSO is strongly depen-
dent on the values of the inertia weight and the accel-
eration coefficients (van den Bergh and Engelbrecht,
2006; Clerc and Kennedy, 2002). Wrong choices of
such parameters may produce divergent or cyclic par-
ticle trajectories. Several recommendations for values
of such parameters have been suggested in the spe-
cialized literature (Storn and Price, 1997), although
these values are not universally applicable to every
kind of problem.
A large number of PSO variations have been de-
veloped, mainly to improve the accuracy of solu-
tions, diversity, convergence or to eliminate the pa-
rameters dependency (Kennedy and Eberhart, 2001).
van den Bergh and Engelbrecht (van den Bergh and
Engelbrecht, 2006) and Clerc y Kennedy (Clerc and
Kennedy, 2002) proved that each particle converges
to a weighted average of its personal best and neigh-
borhood best position, that is,
lim
t→+∞
x
i j
(t) =
c
1
y
i j
+ c
2
b
y
i j
c
1
+ c
2
(3)
This theoretically derived behavior provides su-
pport for the Bare-bones PSO (BBPSO). BBPSO was
proposed by Kennedy in 2003 (Kennedy, 2003). The
BBPSO replaces the equation (1) and (2) with equa-
tion (4),
x
i j
(t + 1) = N
y
i j
(t) +
b
y
j
(t)
2
, |y
i j
(t) −
b
y
j
(t)|
(4)
Particle positions are therefore randomly selected
from N which is a Gaussian distribution with: mean,
equal to the average weighted of its personal best and
the global best positions (i.e. the swarm attractor)
and; deviation y
i j
(t) −
b
y
j
(t) which approximate zero
as t increases.
Kennedy also proposed an alternative version of
the BBPSO (EXP). He replaced the equations (1) and
(2) with equation (5),
x
i j
(t +1) =
N
y
i j
(t)+
b
y
j
(t)
2
, |y
i j
(t) −
b
y
j
(t)|
if U(0, 1)
> 0.5
y
i j
(t) otherwise
(5)
Based on the above equation, there is a 50%
chance that the j the dimension of the particle dimen-
sion changes to the corresponding personal best posi-
tion. This version of PSO biases towards exploiting
personal best positions.
3 DESCRIPTION OF OUR
EXPERIMENT
In PSO, each particle inside of the swarm belongs to
an specific communication neighborhood. Therefore,
it was natural that several studies were performed in
order to determine whether the neighborhood topo-
logy could affect the convergence (Kennedy, 1999;
Kennedy and Mendes, 2002; Jian et al., 2004). These
studies relied on theoretical proposals and implemen-
tations of neighborhood topologies commonly used
by PSO. In such studies, some neighborhood topolo-
gies have performed better than others (Kennedy,
1999). However, only a few topologies and prob-
lems were tested at a time. Therefore, our hypothe-
sis to perform this study was that the topology used
in a particle swarm might affect the rate and degree
to which the swarm is attracted towards a particu-
lar region. Thus, the present study focused on seve-
ral swarm topologies, where connections were undi-
rected, unweighted, and they no vary over the course
A COMPARATIVE STUDY OF NEIGHBORHOOD TOPOLOGIES FOR PARTICLE SWARM OPTIMIZERS
153
of a trial. The neighborhoods topologies were con-
structed based on the index of each particle, then each
particle has a unique identifier in the entire popula-
tion. We also decided to study how clustering al-
gorithms can improve the performance of the PSO.
In clustering algorithms, the euclidean distance were
used as a measure and the connections were updated
dynamically on each iteration of the trail.
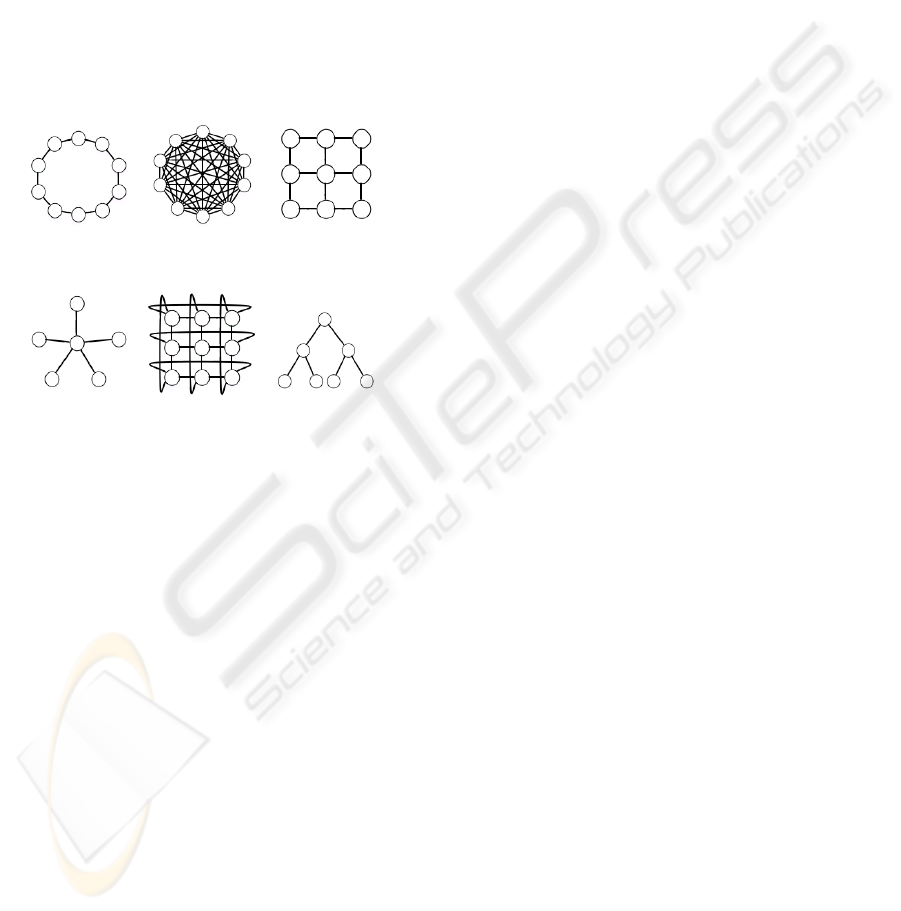
Since this paper analyzes the ring, fully con-
nected, mesh, toroidal, tree, star topologies shown
in Figure 1 and two clustering algorithms: k-means
and hierarchical in order to determined whether the
type of communication employed to interconnect the
swarm accelerates or affects the algorithm conver-
gence. We described them below:
(a) Ring (b) Fully con-
nected
(c) Mesh
(d) Star (e) Toroidal (f) Tree
Figure 1: Neighborhood topologies used in this study.
3.1 Ring Topology
The ring topology is also known as the lbest version in
PSO (see Figure 1(a)). In this topology each particle
is affected by the best performance of its k immediate
neighbors in the topological population. In one com-
mon lbest case, k = 2, the individual is affected by
only its immediately adjacent neighbors.
In the ring topology, the neighbors are closely
connected and thus, they react when one particle has
a raise in its fitness, this reaction dilutes proportion-
ally with respect to the distance. Thus, it is possible
that one segment of the population might converge on
a local optimum, while another segment of the pop-
ulation might converge to a different point or remain
searching. However, the optima will eventually pull
the swarm.
3.2 Fully Connected Topology
Fully connected topology is also known as the full
topology (see Figure 1(b)). All nodes in this topolo-
gy are directly connected among each other. In PSO
this topology is also known as the PSO’s gbest ver-
sion, in which all particles in the entire swarm direct
their flight toward the best particle found in the whole
population (i.e. every particle is attracted to the best
solution found by any member of the swarm). That is,
b
y
i
(t) ∈ {y
0
(t), y
1
(t), . . . , y
s
(t)} = min{f (y
0
(t)), f (y
1
(t)),
. . . , f (y
s
(t))}, (6)
Kennedy et al. suggested (Kennedy and Eberhart,
2001; Kennedy and Mendes, 2002) that gbest popula-
tions tend to converge more rapidly to a optima than
lbest populations, but also, they are more susceptible
to converge to a local optima. However, this topology
is the most used by far.
3.3 Star Topology
In star topology, the information passes through only
one individual (see Figure 1(d)). One central node
influences and it is influenced by all other members
of the population.
In this article, the central particle of the star topol-
ogy is selected randomly. In each time step t, all par-
ticles of the entire swarm directs their flight toward
one particle (the central particle), and the central par-
ticle directs its flight toward the best particle of the
neighborhood. The star topology, effectively isolates
individuals from each other, since information has to
be communicated through the central node. This cen-
tral node compares the performance of every indivi-
dual in the population and adjusts its own trajectory
toward the best of them. Thus the central individ-
ual serves as a kind of buffer or filter, slowing the
speed of transmission of good solutions through the
population. The buffering effect of the central par-
ticle should prevent premature convergence on local
optima; this is a way to preserve diversity of poten-
tial problem solutions, though, it was expected that it
might destroy population’s collaboration ability.
3.4 Mesh Topology
In this type of topology (see Figure 1(c)), one node is
connected to several nodes, commonly each node is
connected to four neighbors (in this case, we connect
each node to the ones which are in the north, south,
east and west of the particle’s location).
In the mesh topology, the particles in the corners
are connected with its two adjacent neighbors. The
particles on the mesh’s boundaries will have tree ad-
jacent neighbors and the particles on the mesh’s cen-
ter will have four adjacent neighbors. Thus, there
exists overlapping neighbors in each particle, allow-
ing redundancy in the search process. The particles
IJCCI 2009 - International Joint Conference on Computational Intelligence
154

will be assigned to each node of the mesh from left to
right and top-down. The mesh remains the same form
throughout the algorithm’s execution.
3.5 Tree Topology
It is also known as a hierarchical topology (see Figure
1(f)). This topology has a central root node (the top
level of the hierarchy) which is connected to one or
more individuals that are one level lower in the hier-
archy (i.e., the second level), while each of the second
level individuals that are connected to the top level
central root individual will also have one or more in-
dividuals which are one level lower in the hierarchy
(i.e., the third level) connected to it (the hierarchy of
the tree is symmetrical).
The tree topology is constructed as a binary tree
(using the particle’s index as nodes), the root node
is selected randomly among swarm and the remain-
ing particles are distributed in the tree branches. The
nodes (particles) in the tree must be, as possible, ba-
lanced in the tree branches. The root node searches
for the best fitness obtained by their children (i.e. the
second level) to redirected its flight. The second level
nodes search for the best fitness found by both, chil-
dren and father.
3.6 Toroidal Topology
Topologically, a torus is a closed surface defined as
the product of two circles (see Figure 1(e)). This topo-
logical torus is often called as Clifford torus.
The toroidal topology is similar to the mesh topo-
logy, except that all particles in the swarm have four
adjacent neighbors. As is shown in Figure 1(e), the
toroidal topology connects every corner particle with
its symmetrical neighbor. The same occurs with the
toroid boundaries. The assignment from particles to
nodes will be similar to the mesh topology assign-
ment.
3.7 Clustering Algorithms
Clustering is defined by the average number of neigh-
bors that any two connected nodes have in common
(Kennedy, 1999). In PSO, the particles naturally clus-
ter in more than one region of the search space usu-
ally indicate the presence of local optima. It seems
reasonable to investigate whether information about
the distribution of particles in the search space could
be exploited to improve particle trajectories (Kennedy
and Eberhart, 2001).
We have implemented two types of clustering al-
gorithms: k-means and hierarchical clustering.
• K-means clustering algorithm:
Given a data set through a certain number of clus-
ters (assume k clusters) fixed a priori. The main
idea is to define k centroids, one for each clus-
ter. These centroids should be placed in a cunning
way because of different location causes a differ-
ent result. The next step is to take each point be-
longing to a given data set and associate it to the
nearest centroid. In PSO, we assume to have 4
clusters. We used the euclidean distance, in order
to associate a particle to its nearest centroid.
• Hierarchical clustering algorithm:
Hierarchical clustering considers the distance be-
tween one cluster and another cluster to be equal
to the shortest distance from any member of one
cluster to any member of the other cluster. If
the data consists of similarities, then hierarchical
clustering considers the similarity between one
cluster and another cluster to be equal to the great-
est similarity from any member of one cluster to
any member of the other cluster.
In order to implement the hierarchical clustering
algorithm into PSO, we defined 4 clusters to be
searched for. The shortest distance between parti-
cles were calculated using the euclidean distance.
3.8 Test Functions
Nine test functions were selected from the specialized
literature. Such test functions are described below:
A. Sphere function, defined as
f (x) =
∑
N
d
i=1
x
2
i
,
where x
∗
= 0 and f (x
∗
) = 0 for −100 ≤x
i
≤ 100
B. Schwefel’s problem , defined as
f (x) =
∑
N
d
i=1
|x
i
|+
∏
N
d
i=1
|x
i
|,
where x
∗
= 0 and f (x
∗
) = 0 for −10 ≤x
i
≤ 10
C. Step function, defined as:
f (x) =
∑
N
d
i=1
(bx
i
+ 0.5c)
2
,
where x
∗
= 0 and f (x
∗
) = 0 for −100 ≤x
i
≤ 100
D. Rosenbrock function, defined as
f (x) =
∑
N
d
−1
i=1
(100(x
i
−x
2
i−1
)
2
+ (x
i−1
−1)
2
),
where x
∗
= (1, 1, . . . , 1) and f (x
∗
) = 0 for −30 ≤
x
i
≤ 30
E. Rotated hyper-ellipsoid function, defined as
f (x) =
∑
N
d
i=1
(
∑
i
j=1
x
j
)
2
,
where x
∗
= 0 and f (x
∗
) = 0 for −100 ≤x
i
≤ 100
F. Generalized Schwefel Problem 2.26, defined as:
f (x) = −
∑
N
d
i=1
(x
i
sin(
p
|x
i
|)),
where x
∗
= (420.9687, . . . , 420.9687) and
f (x
∗
) = −4426.407721 for −500 ≤x
i
≤ 500
A COMPARATIVE STUDY OF NEIGHBORHOOD TOPOLOGIES FOR PARTICLE SWARM OPTIMIZERS
155

G. Rastrigin function, defined as:
f (x) = −
∑
N
d
i=1
(x
2
i
−10cos(2πx
i
) + 10),
where x
∗
= 0 and f (x
∗
) = 0 for −5.12 ≤x
i
≤5.12
H. Ackley’s function, defined as
f (x) = −20exp
− 0.2
q
1
30
∑
N
d
i=1
x
2
i
−
exp
1
30
∑
N
d
i=1
cos(2πx
i
)
+ 20 + e,
where x
∗
= 0 and f (x
∗
) = 0 for −32 ≤x
i
≤ 32
I. Griewank function, defined as:
f (x) =
1
4000
∑
N
d
i=1
x
2
i
−
∏
N
d
i=1
cos
x
i
√
i
+ 1,
where x
∗
= 0 and f (x
∗
) = 0 for −600 ≤x
i
≤ 600
4 DISCUSSION OF RESULTS
This section compares the performance of the ba-
sic PSO, BBPSO and BBPSO (EXP) algorithms dis-
cussed in Section 2. We implemented: ring, full,
star, mesh, toroidal and tree neighborhood topologies
and; k-means and hierarchical clustering algorithms
on each PSO algorithm. It is important to note that
neighborhood topologies were determined using par-
ticle indexes and were not based on any spatial infor-
mation. For both clustering algorithms, the euclidean
distance (spatial information) has been used to deter-
mined the distance among particles.
For the basic PSO algorithm, we used w = 0.72
and c
1
= c
2
= 1.49. These values have been shown
to provide good results (Clerc and Kennedy, 2002;
van den Bergh, 2002; van den Bergh and Engelbrecht,
2006).
For all the algorithms used in this section, the
swarm size was s = 50. 200 iterations were perform
by each algorithm (24 algorithms, since there were
implemented 6 topologies + 2 clustering techniques
in 3 PSO variants). Every resulting approach were ex-
ecuted 30 independent runs. These values were used
as defaults for all experiments which use static con-
trol parameters. Also, the distribution of the particles
were 10 ×5 when the mesh and toroidal topologies
were used. For hierarchical and k-means clustering
algorithms, 4 groups were asked for.
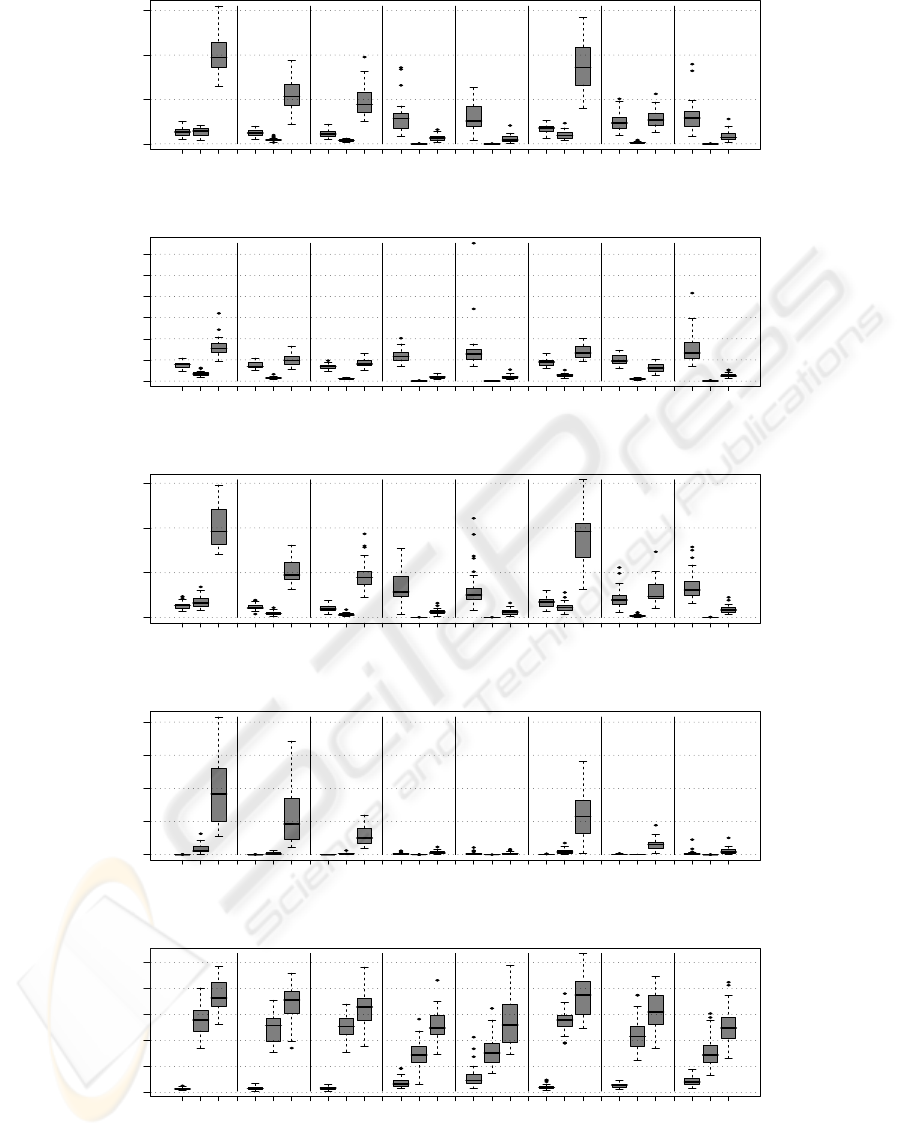
Since there are 3 algorithms, 8 different neighbor-
hood topologies, and 9 test functions, it was difficult
to show numerical results. In order to present such
results in a friendly-comparison way, we selected to
show the numerical results as box-plot graphics. In
Figures 2 and 3 shows such results.
From Figures 2 and 3, it is easily to see that the
BBPSO (EXP) version is highly dependent of the in-
terconnection topology, since it only presented a good
behavior when the fully connected, star and hierarchi-
cal approaches were used. However, when the remain
topologies were used, it presented the worst results
among the three algorithms. Therefore, we can say
that PSO and BBPSO algorithms showed a more ro-
bust behavior.
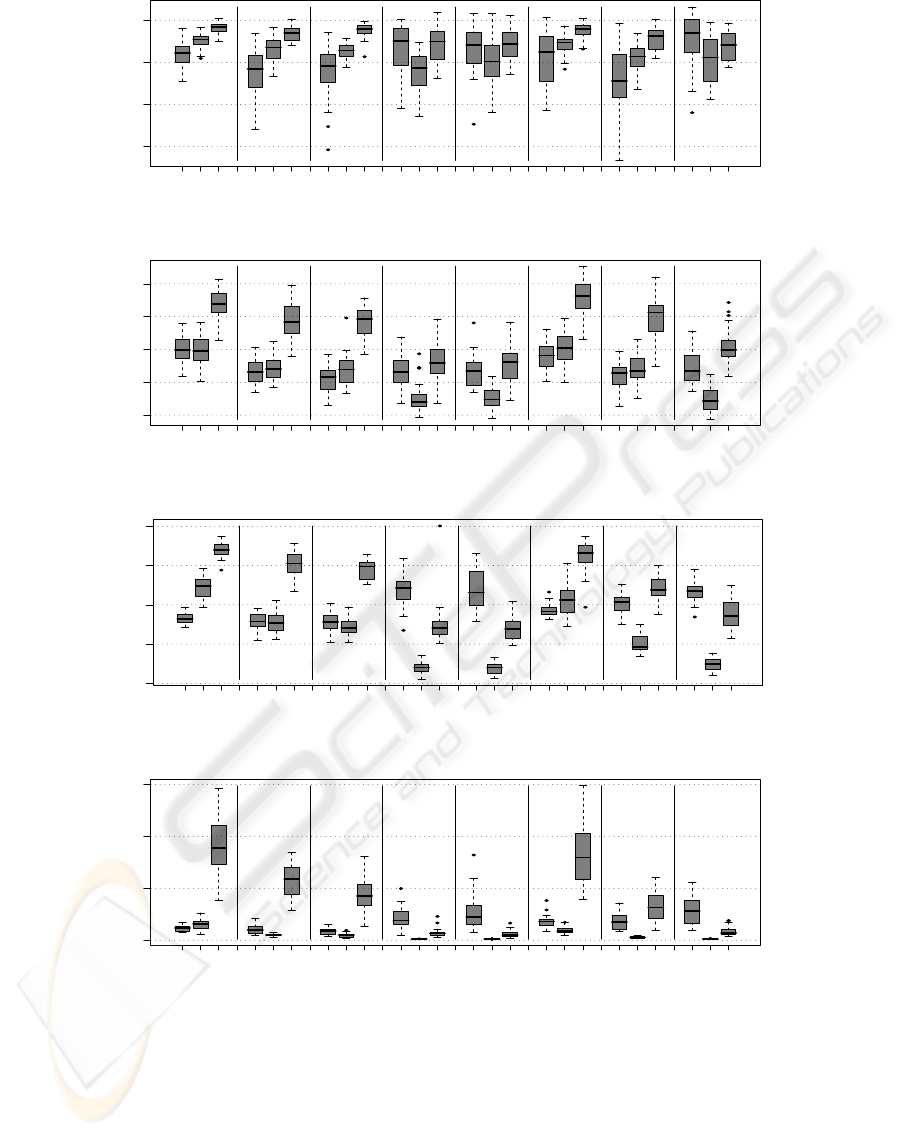
When PSO was used, the best topologies which
showed better results were toroidal, ring and mesh
(see Figures 2(a), 2(b), 2(c), 2(e), 3(b), 3(c), 3(d),
which corresponds to the sphere, schwefel, step, ro-
tated hyper-ellipsoid, ratrigin, ackley and griewank
test functions, respectively). For the generalized
schwefel test function (see Figure 3(a)) the k-means
clustering algorithm was the approach which per-
form the best. For the Rosenbrock test function all
topologies and clustering algorithms performed well.
In summary, when toroidal, mesh and ring topolo-
gies were used, PSO presented an good performance.
When BBPSO was used, the topologies which per-
formed better were full, star and hierarchical cluster-
ing algorithms in all test functions (see Figures 2 and
3).
In our opinion, BBPSO presented the best perfor-
mance, since it outperformed the other two PSO ap-
proaches in six out of nine test functions (see results
shown in Figures 2(a), 2(b), 2(c), 3(b), 3(c) and 3(d)
which corresponds to sphere, schwefel, step, ratrigin,
ackley and griewank test functions). BBPSO obtained
similar results with respect to the results obtained by
PSO in Rosenbrock test function (see results shown in
Figure 2(d)). The original PSO algorithm outperform
the others two PSO approaches in two out of nine test
functions (see results shown in Figures 2(e) and 3(a)
which corresponds to the rotated hyper-ellipsoid and
the generalized schwefel test functions).
From our results, we can conclude that, the topo-
logy plays a key role in PSO. The original PSO ap-
proach should be used with the toroidal, mesh and
ring topologies, whilst BBPSO should be used with
the fully connected, star or hierarchical clustering
methods.
5 CONCLUSIONS AND FUTURE
WORK
Our main conclusions are the following:
• We found that the use of mesh, toroidal and ring
topologies promote better convergence rates in the
PSO algorithm.
• The use of the fully connected, star and hierarchi-
cal clustering approaches promote better conver-
gence rates in the BBPSO algorithm.
• The topology most widely used (fully connected
topology) did not perform well in PSO algorithm
IJCCI 2009 - International Joint Conference on Computational Intelligence
156

whilst presented a good performance in BBPSO.
• Ring topology (which it is the another topology
widely used) presented a good convergence rate.
• The good selection of a topology can increase the
performance of a PSO-based algorithm.
Some possible paths to extend this work are the fol-
lowing:
• Experiment with other PSO’s models and diffe-
rential evolution algorithms.
• To include the parameter’s values w, c
1
and c
2
in
a similar study, in order to identify the relation
among parameters (including the topology).
ACKNOWLEDGEMENTS
The first author acknowledges support from CONA-
CyT through a scholarship to pursue graduate stu-
dies at the Information Technology Laboratory at
CINVESTAV-IPN. The second author gratefully ac-
knowledges support from CONACyT through project
90548. Also, This research was partially funded by
project number 51623 from “Fondo Mixto Conacyt-
Gobierno del Estado de Tamaulipas”
REFERENCES
Clerc, M. and Kennedy, J. (2002). The particle swarm-
explosion, stability, and convergence in a multidimen-
sional complex space. IEEE Transactions on Evolu-
tionary Computation, 6(1):58–73.
Jian, W., Xue, Y., and Qian, J. (2004). Improved par-
ticle swarm optimization algoritnms study based on
the neighborhoods topologies. In The 30th Annual
Conference of the IEEE Industrial Electronics Soci-
ety,2004. IECON 2004, volume 3, pages 2192–2196,
Busan, Korea.
Kennedy, J. (1999). Small worlds and mega-mind: Ef-
fects of neighborhood topology on particle swarm per-
formance. In Proceedings of the IEEE Congress on
Evolutionary Computation, 1999. CEC 99, volume 3,
pages 1931–1938, Washington, DC, USA.
Kennedy, J. (2003). Bare bones particle swarms. In Pro-
ceedings of the IEEE Swarm Intelligence Symposium,
2003. SIS ’03, pages 80–87, Piscataway, NJ. IEEE
Press.
Kennedy, J. and Eberhart, R. (1995). Particle swarm opti-
mization. In Proceedings of the IEEE International
Joint Conference on Neural Networks, pages 1942–
1948, Piscataway, NJ. IEEE Press.
Kennedy, J. and Eberhart, R. C., editors (2001). Swarm
Intelligence. Morgan Kaufmann, San Francisco, Cal-
ifornia.
Kennedy, J. and Mendes, R. (2002). Population structure
and particle performance. In Proceedings of the IEEE
Congress on Evolutionary Computation, 2002. CEC
’02, pages 1671–1676, Washington, DC, USA. IEEE
Computer Society.
Omran, M., Engelbrecht, A., and Salman, A. (2008). Bare
bones differential evolution. European Journal of Op-
erational Research, 196(1):128–139.
Shi and Eberhart, R. (1998). A modified particle swarm
optimizer. In Proceedings of the IEEE Congress on
Evolutionary Computation, 1998, pages 69–73, An-
chorage, AK, USA.
Storn, R. and Price, K. (1997). Differential evolution - a
simple and efficient adaptive scheme for global opti-
mization over continuous spaces. Journal of Global
Optimization, 11(4):359–431.
van den Bergh, F. (2002). An Analysis of Particle Swarm
Optimizers. PhD thesis, Department of Computer Sci-
ence, University of Pretoria, Pretoria, South Africa.
van den Bergh, F. and Engelbrecht, A. (2006). A study of
particle swarm optimization particle trajectories. In-
formation sciences, 176 (8):937–971.
A COMPARATIVE STUDY OF NEIGHBORHOOD TOPOLOGIES FOR PARTICLE SWARM OPTIMIZERS
157
0 5000 10000 15000
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(a) Sphere test function
0 20 40 60 80 100 120
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(b) Schwefel test function
0 5000 10000 15000
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(c) Step test function
0e+00 2e+07 4e+07 6e+07 8e+07
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(d) Rosenbrock
0 10000 20000 30000 40000 50000
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(e) Rotated hyper-ellipsoid function
Figure 2: Box-plots produced from the results of 30 independent runs for the ring, mesh, toroidal fully connected, star, and
tree topologies; and k-means and hierarchical clustering algorithms.
IJCCI 2009 - International Joint Conference on Computational Intelligence
158
−40000 −30000 −20000 −10000
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(a) Generalized Schwefel test function
50 100 150 200 250
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(b) Ratrigin test function
0 5 10 15 20
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(c) Ackley test function
0 50 100 150
f(t)
PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP PSO BB EXP
Ring Mesh Toroidal Full Star Tree K−means Hierarchical
(d) Griewank test function
Figure 3: Box-plots produced from the results of 30 independent runs for the ring, mesh, toroidal fully connected, star, and
tree topologies; and k-means and hierarchical clustering algorithms.
A COMPARATIVE STUDY OF NEIGHBORHOOD TOPOLOGIES FOR PARTICLE SWARM OPTIMIZERS
159
