
SAM
Semantic Agent Model for SWRL Rule-based Agents
Julien Subercaze
Universit
´
e de Lyon, LIRIS UMR 5205, INSA de Lyon, Villeurbanne, France
Pierre Maret
Universit
´
e de Lyon, LaHC UMR 5516, Universit
´
e de Saint-Etienne, France
Keywords:
Autonomous agent, Agent architecture, Rule-based agent, Semantic web, Behavior exchange, Consistency
checking, SWRL.
Abstract:
Semantic Web technologies are part of multi-agent engineering, especially regarding knowledge base support.
Recent advances in the field of logic for the semantic web enable a new range of applications. Among them,
programming agents based on semantic rules is a promising field. In this paper we present a semantic agent
model that allows SWRL programming of agents. Our approach, based on the extended finite state machine
concept, results in a three layers architecture. We detail the architecture, the syntax of the rules , the agent
interpreter cycle and present a prototype validating the concept. We present two distinguished features of our
approach : behavior exchanges and consistency checking.
1 INTRODUCTION AND
MOTIVATION
Since the publishing of the agent roadmap in 2003
(Luck et al., 2003) that pointed out the lack of con-
nection between Multi-Agent Systems and Semantic
Web technologies, applications and frameworks have
been developed to bridge this gap.
But agent behaviour programming has difficulties
to take advantage of these technologies. The S-APL
(Semantic agent programming language) was intro-
duced by Katasonov (Katasonov and Terziyan, 2008).
This language, which is the most advanced attempt of
agent semantic programming is built on top of JADE
and CWM (Closed World Machine), a rule based rea-
soning engine based on Horn Clauses and Closed
World assumption. Closed world assumption implies
that evertything that is not known to be true, is false.
The opposite of closed world assumption is the open
world assumption. Open world assumption states that
everything that is not known is undefined. As stated in
(Dam
´
asio et al., 2006), the incompleteness of knowl-
edge owned by agents is the reason for using the open
world assumption in MAS. Our motivation is to build
an agent model that takes advantage of Description
logics expressivity used in semantic web technologies
OWL and SWRL (Semantic Web Rule Language).
Description logics are more expressive than standard
Horn clauses and are based upon open world assump-
tion. Due to recent advances in implementation, it is
now possible to develop agents based on SWRL rules.
In the next section we explain the construction of
our agent’s model. We first introduce the layered ar-
chitecture, then detail the control structure and give
a formal description of the SAM grammar. After
the description of the agent architecture, we present
in section 3 behaviour exchanges and consistency
checking features. An implementation of the archi-
tecture is presented in section 4. Our conclusions are
presented in section 5.
2 BUILDING AGENTS WITH
SEMANTIC RULES
2.1 SAM Agent Architecture
Programming agent behaviour using a rule language
can be carried out in two ways. The first way consists
in extending a logic programming language in order
to support traditional agent features (i.e. message
245
Subercaze J. and Maret P. (2010).
SAM- Semantic Agent Model for SWRL Rule-based Agents.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 245-248
DOI: 10.5220/0002689002450248
Copyright
c
SciTePress
passing, threading, etc.). The second way consists
in building a layered architecture using the rule lan-
guage at an upper layer. Agent features are delegated
to a lower layer. Commonly, in this type of archi-
tecture, the lower level language (i.e. Java, C++,etc.)
is used to handle communication, file access, thread
management, etc. The main idea behind this approach
is to reuse the required features for MAS that are al-
ready implemented in another language and to define
an agent interpreter to support a particular architec-
ture, such as BDI for instance. The literature shows
examples of both approaches. Clark et al. (Clark
et al., 2001) follows the first approach by extend-
ing Qu-Prolog with multi-threading support and inter-
thread message communication. However, this ap-
proach is not scalable and does not comply with the
Agent Communication Language (ACL) specified by
the FIPA
1
. FIPA-ACL is currently recognized as the
standard for agent communication and ensures inter-
operability between MAS frameworks. S-APL, that
we discussed in the previous section, follows the same
approach but some direct calls to JAVA functions are
inserted into the rules.
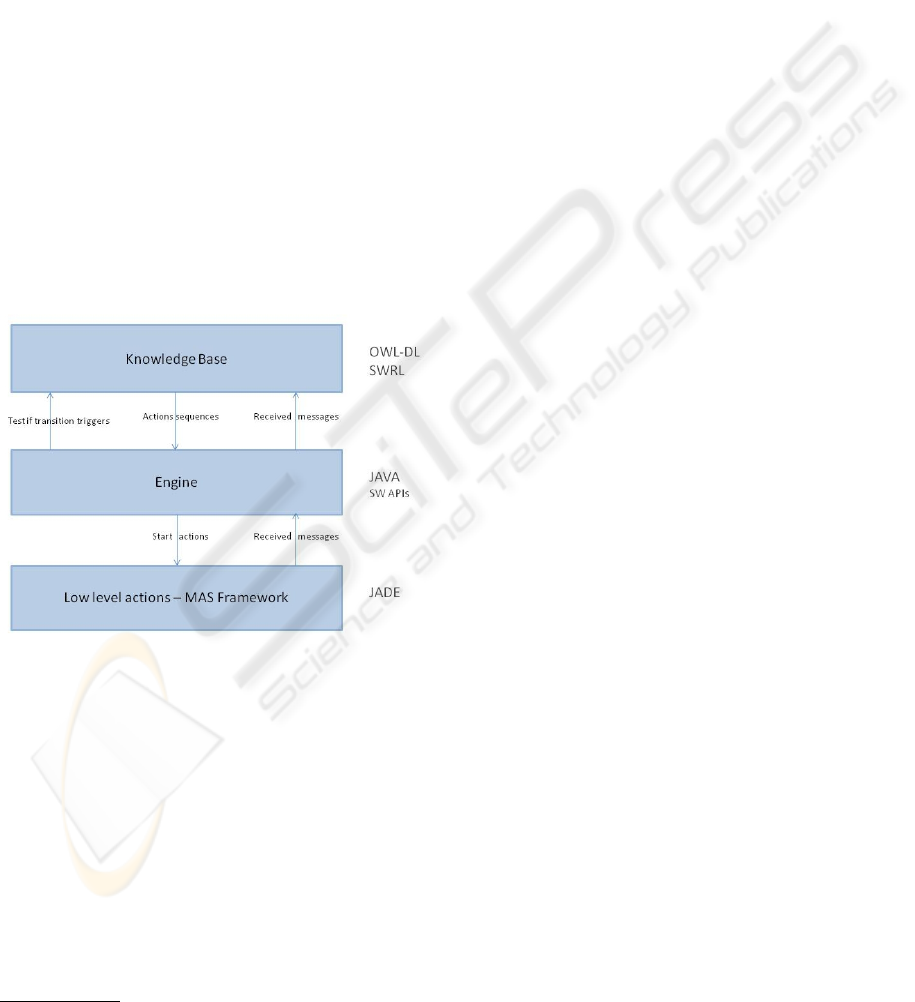
Figure 1: SAM Agent Architecture.
Standard MAS languages rely on the second ap-
proach. Agent0, the first agent dedicated language,
which is an implementation of Shoham’s Agent Ori-
ented Programming was developed on top of LISP.
Equally, 3APL, 3APL-m, JASON and the BDI agent
system Jadex are based on JAVA.
Our architecture follows the second approach and
results in the following layered architecture (Fig. 1):
Knowledge Base. The knowledge base is the up-
per layer of the SAM architecture. The knowledge
base contains the knowledge of the agent which, in
1
http://www.fipa.org/repository/aclspecs.html
our approach, is composed of static knowledge and
behaviour. Behaviour of agent is expressed using
SWRL rules. As SWRL is based upon OWL, terms
of the knowledge base are directly manipulated in the
rules. Terms of the knowledge base can appear in both
antecedent and consequent of rules. A formal specifi-
cation of the rule syntax is given in section 2.3.
Engine. As SWRL buid-ins do not cover all the re-
quirements for agent programming , we have intro-
duced additional low level actions (3rd layer). This
middle layer is the control structure that make the in-
terface between the rules contained in the knowledge
base and the low level actions. Rules from the knowl-
edge base are fired by the engine, one at a time. If the
rule implies to call low level actions, the engine layer
carries out this call.
Low Level Actions and MAS Framework. This
layer contains the implementation of the low level ac-
tions that are complementary to SWRL built-ins. No-
tice that these actions are introduced as instances of
OWL class Actions in the syntax of the rules (top
layer). Communication between agents relies on an
existing MAS framework. Messages are structured
following the FIPA-ACL standard, consequently the
MAS framework has to be FIPA compliant (our im-
plementation is based upon JADE). Messages from
other agents are received through the MAS frame-
work, then converted into an OWL representation and
finally added to the knowledge base.
2.2 Control Structure
Rule-based agents constitutes an important part of
the research on MAS. In (Hindriks et al., 1999b),
Hindriks et al. define the requirement for a mini-
mal agent programming language that includes rules
and goals. They also defined formalization tools
that were applied to three standard agent program-
ming languages AGENT-0(Shoham, 1991), AgentS-
peak(L)(Rao, 1996) (that was later implemented and
extended in JASON(Bordini and Hubner, 2006)) and
3APL(Hindriks et al., 1999a). Their definition of an
agent program for goal directed agents includes a set
of rules Γ called the rule base of the agent. They
identify rule ordering as a crucial issue in rule-based
agents. However, this presents us with the follow-
ing problem : when several rules from the ruleset can
be fired, there must be an order to determine the se-
quence of execution of those rules. So the order in
which the rules will be sorted must be defined. Hin-
driks et al. (Hindriks et al., 1999b) proposed that
all rules fall into one of the following categories :
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
246
SAMrule ::= ’Implies(’ [ URIreference ]
{ annotation }
SAMantecedent SAMconsequent ’)’
SAMantecedent::= currentState(’i-variable’)’
hasStateValue’(’i-variable’)’ atom*
SAMconsequent::= hasNextState’(’i-variable’)’
hasActionList’(a-list’)’ atom*
a-list ::= hasValue(action) hasNext(a-list)
| endlist
action ::= URIreference hasParameterName(a-name)
a-name ::= hasParameterValue(i-object)
Figure 2: Extension of SWRL EBNF.
reactive(R), means-end(M), failure(F) and optimisa-
tion(O) with an order based on intuition :
R > F > M > O
As SWRL doesn’t support rule ordering, we are also
confronted with the same issue. However, instead of
deciding an arbitrary order, we have decided to use
another model of behavior, a slightly modified version
of the Extended Finite State Machine (EFSM) model
(Cheng and Krishnakumar, 1993), that guarantees the
execution of only one rule at a time.
2.3 Language Syntax
The syntax of the rule language that we designed
(given in figure 2) is expressed in Extended Backus-
Naur Form (EBNF). This syntax is based on the ex-
isting SWRL EBNF syntax as specified in (Horrocks
et al., 2004). SAM grammar is a subset of the SWRL
grammar. In the antecedent of a SAM rule (SAMan-
tecedent) it is mandotary to specify to which state the
rule applies. This is set up by the hasStateValue prop-
erty. The previous property, currentState, ensures
that the rule will be fired when the current state of
the EFSM is the one to which the rule applies. The
second part of the antecedent contains the triggering
conditions. In this part, conditions under which the
transition will be triggered are defined. The range of
these conditions is the knowledge base of the agent.
These conditions are represented by atom* which is
not modified from the original SWRL specification.
Conditions can test the validity of class belonging,
property between classes or between individuals, in-
cluding received messages.
The rule consequent term (SAMconsequent) spec-
ifies the destination state of the transition and the se-
quence of atomic actions to be executed. *Each ac-
tion has different parameters. Parameters are passed
using two properties, hasParameterName and hasPa-
rameterValue. The first property applies to the action
which is to be executed and specifies the name of the
parameter. Then hasParameterValue is applied to the
name of the parameter in order to specify its value.
Internal Actions. Among internal actions, we
made the distinction between SWRL built-ins that are
executed by the rule engine and the other required ac-
tions that in our model, are the low level atomic ac-
tions. These latter are called by the agent interpreter.
External Actions. Refer to the agents’ interactions
with their environment. We restrict our scope to soft-
ware agents that evolve in an electronic environment.
Interactions are then limited to message exchanges
between agents. We rely on the FIPA ACL specifi-
cation for the message structures. Received messages
are stored in the messagelist. From those simple ac-
tions, it is possible to build complex interactions be-
tween actions, for instance FIPA ACL specifies an
extensive communicative act library including query-
answer, contracting, proposal, subscribing. Differ-
ent fields of the message are represented in the OWL
knowledge Base using properties, i.e. hasPerforma-
tive, hasContent, hasSender.
3 FEATURES AND BENEFITS
This architecture, as described in previous sections
presents two main advantages over existing seman-
tic agent architectures. Firstly, in SAM, behaviors
are represented using a rule language that follows the
same syntax as the knowledge representation (SWRL
and OWL). This way, behaviour and knowledge are
represented and stored in the same layer of the ar-
chitecture. Combining this feature with the fact
that agents are aware of their own architecture, be-
haviour exchanges among agents are natively enabled
in SAM.
Secondly, the logical foundation of SAM agents
differs from existing agents framework. Description
Logic tools provide reasoning mechanism that allows
consistency checking. For a single agent, consistency
checking ensures that the received knowledge from
external sources is consistent with its internal knowl-
edge.
We implemented examples for both behavior ex-
changes and consistency checking in the prototype
presented in the next section.
SAM- Semantic Agent Model for SWRL Rule-based Agents
247

4 IMPLEMENTATION
We have developed a JAVA interpreter that commu-
nicates with the knowledge Base using the Protege-
OWL API
2
. Pellet
3
is used in combination with Jena
4
as a OWL and SWRL reasoner. The JADE frame-
work is used for the low level external actions and
to provide communication facilities between agents.
The framework handles agent registration, service
discovery and message passing. It also provides an
environment that is FIPA-ACL compliant and thus
ensures interoperability with FIPA-ACL compliant
frameworks. Since OWL does not support RDF lists,
we used OWLList to represent action sequences and
for the queue of received messages. The open-source
prototype is available online
5
.
Along to the validation of the model, the im-
plementation showed us some limitations. We have
used Pellet as a SWRL reasoner, since it is currently
the most advanced open-source implementation of
SWRL. As developments stands at the moment, sev-
eral important features are not supported by Pellet, for
instance some SWRL built-ins are not yet available.
The implementation results show the feasability of
the proposal and we intend to further develop the pro-
totype to make it fully suitable for the development of
applications.
5 CONCLUSION AND
PERSPECTIVES
In this paper we showed how the next generation of
Semantic Web technologies can be applied in MAS
programming. We presented an agent model called
SAM that enables agent development using the Se-
mantic Web Rule Language (SWRL). We described
the three layer architecture, the OWL agent model, its
rule syntax and we validated our approach by the im-
plementation of a prototype.
We presented two main features of SAM. We de-
scribed how behaviours exchanges in SAM can be
made regardless of the low level implementation lan-
guage, making SAM agents ”real” semantic agents.
Description Logic that underpins and which is in-
herent in SWRL is a very powerful logic and it al-
lows greater agent reasoning capabilities than stan-
dard Prolog. Description Logic tools enable dynamic
consistency checking, that is used to maintain agent’s
2
http://protege.stanford.edu/plugins/owl/
3
http://clarkparsia.com/pellet/
4
http://jena.sourceforge.net/
5
http://code.google.com/p/semanticagent/
knowledge base consistency and to provide explana-
tion of inconsistencies. Further research will focus on
the development of applications based on these fea-
tures, especially in the field of multi-agent argumen-
tation and negotiation.
REFERENCES
Bordini, R. and Hubner, J. (2006). BDI agent program-
ming in AgentSpeak using Jason. In Proceedings of
6th International Workshop on Computational Logic
in Multi-Agent Systems (CLIMA VI), volume 3900,
pages 143–164. Springer.
Cheng, K. and Krishnakumar, A. (1993). Automatic func-
tional test generation using the extended finite state
machine model. In Proceedings of the 30th interna-
tional conference on Design automation, pages 86–
91. ACM New York, NY, USA.
Clark, K., Robinson, P., and Hagen, R. (2001). Multi-
threading and message communication in Qu-
Prolog. Theory and Practice of Logic Programming,
1(03):283–301.
Dam
´
asio, C. V., Analyti, A., Antoniou, G., and Wagner,
G. (2006). Open and closed world reasoning in the
semantic web. In Proceedings of IPMU 2006), spe-
cial session Works on the Semantic Web, pages 1850–
1857, Paris, France. Editions E.D.K. Participac¸
˜
aoo
por convite e sujeita a avaliac¸
˜
ao.
Hindriks, K., De Boer, F., Van der Hoek, W., and Meyer, J.
(1999a). Agent programming in 3APL. Autonomous
Agents and Multi-Agent Systems, 2(4):357–401.
Hindriks, K., De Boer, F., Van Der Hoek, W., and Meyer,
J. (1999b). Control structures of rule-based agent lan-
guages. In Atal’98: Paris, France, page 384. Springer.
Horrocks, I., Patel-Schneider, P., Boley, H., Tabet, S.,
Grosof, B., and Dean, M. (2004). SWRL: A seman-
tic web rule language combining OWL and RuleML.
W3C Member Submission, 21.
Katasonov, A. and Terziyan, V. (2008). Semantic agent
programming language (S-APL): A middleware plat-
form for the Semantic web. In Proc. 2nd IEEE Inter-
national Conference on Semantic Computing, pages
504–511.
Luck, M., McBurney, P., and Preist, C. (2003). Agent
technology: Enabling next generation computing.
AgentLink II.
Rao, A. (1996). AgentSpeak (L): BDI agents speak out in a
logical computable language. Lecture Notes in Com-
puter Science, 1038:42–55.
Shoham, Y. (1991). AGENT0: A simple agent language and
its interpreter. In Proceedings of the Ninth National
Conference on Artificial Intelligence, volume 2, pages
704–709.
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
248
