
COMPARISON OF DIFFERENT CLASSIFIERS ON A REDUCED
SET OF FEATURES FOR MENTAL TASKS-BASED BRAIN
COMPUTER INTERFACE
Giovanni Saggio, Pietro Cavallo, Giovanni Costantini, Gianluca Susi
Dept. of Electronic Engineering, “Tor Vergata” University, Via del Politecnico 1, 00133 Rome, Italy
Lucia Rita Quitadamo
1
, Maria Grazia Marciani, Luigi Bianchi
1
Dept. of Neuroscience, “Tor Vergata” University, Via Montpellier 1, 00133 Rome, Italy
Fondazione Santa Lucia, IRCCS, Neuroelectrical Imaging and BCI Laboratory, Via Ardeatina 306, 00179, Rome, Italy
1
Centro di Biomedicina Spaziale, “Tor Vergata” University, Rome, Italy
Keywords: BCI, Neural Networks, Fuzzy Logic, SVM.
Abstract: In this study a comparison among three different machine learning techniques for the classification of
mental tasks for a Brain-Computer Interface system is presented: MLP neural network, Fuzzy C-Means
Analysis and Support Vector Machine (SVM). In BCI literature, finding the best classifier is a very hard
problem to solve, and it is still an open question. We considered only ten electrodes for our analysis, in
order to lower the computational workload. Different parameters were analyzed for the evaluation of the
performances of the classifiers: accuracy, training time and size of the training dataset. Results
demonstrated how the accuracies of the three classifiers are nearly the same but the error margin of SVM on
this reduced dataset is larger compared to the other two classifiers. Furthermore neural network needs a
reduced number of trials for training purposes, reducing the recording session up to 8 times with respect to
SVM and Fuzzy analysis. This suggests how, in the presented case, MLP neural network can be preferable
for the classification of mental tasks in Brain Computer Interface systems.
1 INTRODUCTION
A Brain Computer Interface (BCI) system allows a
subject to act on his environment by means of his
thoughts, without using the brain normal output
pathways of muscles or peripheral nerves (Wolpaw,
2002).
This system intends to furnish people with motor
disabilities an alternative communication channel,
by translating some of their brain signals into
commands for piloting an external device such as a
wheelchair, a robotic arm, a Web surfer, a cursor on
a screen, a speech synthesizer, etc. This result can be
obtained by means of the brain signals which are
acquired and then processed to extract some features
of interest from them; these features are then
classified and encoded into semantic symbols that
are finally mapped into the output commands.
Some BCI systems can be driven by mental tasks
(Schögl, 2005), (Huan and Palaniappan, 2004), in
the sense that the user of the system mentally
imagines to perform some particular tasks that are
then recognized by a classifier and used to pilot the
output peripheral. As in the case of the experimental
protocol described in this paper, the subject is asked
to imagine right and left hand movements, to
perform mental calculation and to mentally recite a
nursery rhyme. Feature extraction and classification
of the recorded brain signals finally allow the
mapping of the four mental tasks into commands
toward the final device.
Within the tools for classifications, we
implemented MLP neural network, Fuzzy C-Means
(FCM) analysis and Support Vector Machine
(SVM). MLP and SVM were adopted since they are
well known methods in machine learning literature
while Fuzzy analysis was chosen because, despite it
is a fairly new methodology in this field (Saggio,
2009), it usually performs a highly accurate spatial
separation.We were interested then in comparing the
174
Saggio G., Cavallo P., Costantini G., Susi G., Rita Quitadamo L., Grazia Marciani M. and Bianchi L. (2010).
COMPARISON OF DIFFERENT CLASSIFIERS ON A REDUCED SET OF FEATURES FOR MENTAL TASKS-BASED BRAIN COMPUTER
INTERFACE.
In Proceedings of the Third International Conference on Bio-inspired Systems and Signal Processing, pages 174-179
DOI: 10.5220/0002696301740179
Copyright
c
SciTePress
performances of the three classifiers and, even if in
literature SVM performs a better classification of
EEG signals (Costantini, 2009), we tried to figure
out if this remains true if only a reduced set of
features is considered.
2 METHODS
2.1 EEG Recording and Preprocessing
Dataset was recorded from six subjects, four male
and two female (average age of 23), free of known
neurological disorders. An elastic electrode cap was
used to record EEG signals, supplied with 61 Ag-
AgCl electrodes located according to the
International 10-20 system. The data were recorded
at a sampling rate of 256 Hz and bandpass-filtered
between 0.5 Hz and 128 Hz. The experimental
protocol consisted of four different imagery tasks:
(1) Left hand movement imagination (L)
(2) Right hand movement imagination (R)
(3) Mental subtraction operation (S)
(4) Mental recitation of a nursery rhyme. (N)
Two sessions on distinct days were recorded for
each subject. Each session consisted of 200 trials (50
for each task).
The subjects sat in a dark room in front of a
computer screen. At the beginning of each trial, a
text indicating the task to perform appeared on the
black screen for 3 secs. The inter-trial interval (ITI)
was set to 1 sec.
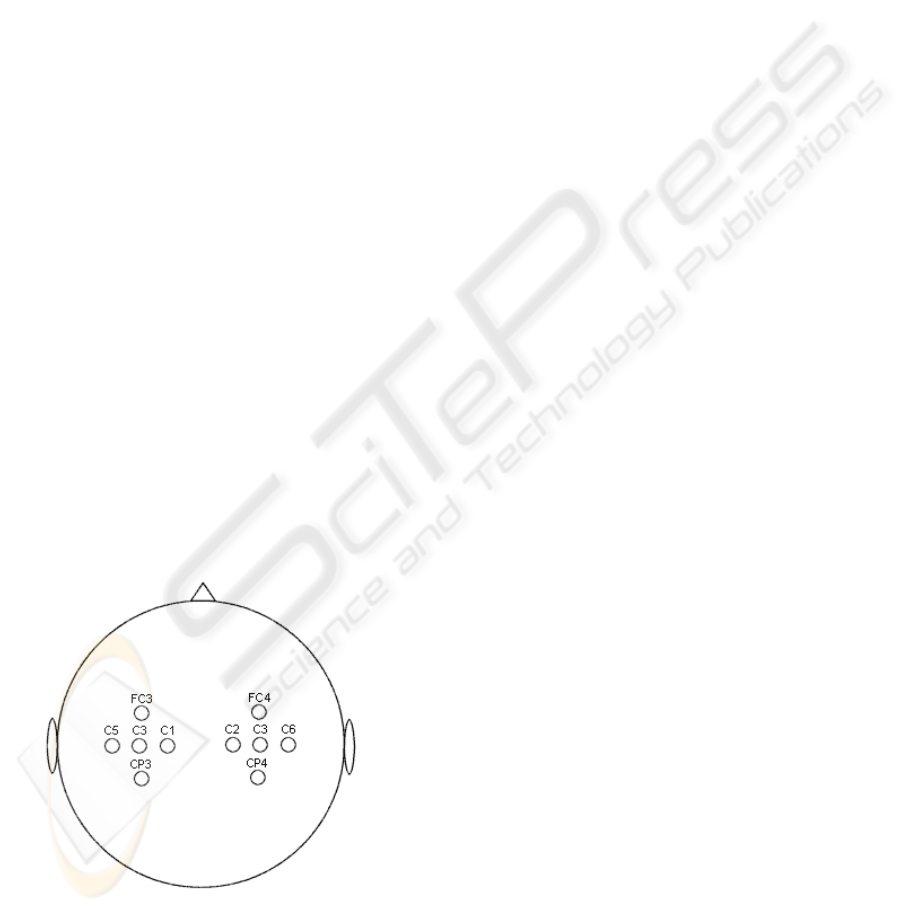
To reduce the computational workload, only 10
among the 61 electrodes (Fig. 1) were considered,
Figure 1: Placement of the 10 EEG considered electrodes.
being the most relevant for the 4 tasks. We selected
frequencies in the range from 8Hz to 13Hz
(corresponding to α band (Kandel, 2000)) for each
electrode.
This means a drastic reduction in the size of the
training set. For a single trial, the relative powers of
the signals in the above-said band, for each
electrode, were computed, and constituted the
features vector fed to the different classifiers.
2.2 Classifiers
In this section the three classifiers are briefly
introduced. For detailed information and for a better
understanding, one can refer to (Cammarata, 1997;
Mikailov, 1997; Bezdek, 1981; Burges, 1998;
Joachims, 1999) or other texts on machine learning
or pattern recognition. In addition to some details
related to classifiers, explanations about the way
they were used are given.
2.2.1 Artificial Neural Networks
An Artificial Neural Network (ANN) is a
computational model inspired by the way biological
nervous systems, such as the brain, process
information. An ANN is composed of a large
number of interconnected processing elements
(artificial neurons) working to solve specific
problems. It can be configured for a specific
application, such as pattern recognition or data
classification, through a learning process. As well as
biological systems, learning process involves
adjustments to the connections that exist between the
artificial neurones.
We adopted here a type of ANN known as Multi-
Layer Perceptron (MLP) Neural Network made of
four layers: one input, two hidden and one output.
This network is very popular in literature because it
can perform non-linear spatial separation. In MLP
each neuron is connected with a certain weight to
every other neuron in the previous layer. Regularly,
at each time step, the input is propagated through
layers. The input layer has 10 neurons, one for each
considered electrode. For each trial input neurons
receive the relative powers of electrodes normalized
to an average of 0.5 value to make measures
comparable between each other. Now the
information is fed to the first hidden layer through
weighted connections. Each hidden layer is formed
by 20 neurons. Excepted for the input layer, all the
neurons are characterized by a sigmoid activation
function:
COMPARISON OF DIFFERENT CLASSIFIERS ON A REDUCED SET OF FEATURES FOR MENTAL
TASKS-BASED BRAIN COMPUTER INTERFACE
175

)5.0(6
1
1
)(
−−
+
=
x
e
xfs
scaled in the range from 0 to 1. Sigmoid was
preferred due to its independent and fundamental
space division properties (Cammarata, 1997; Hara
and Nakayamma, 1994) as it models the frequency
of action potentials of biological neurons in the
brain. The output layer has 4 neurons, one for each
mental task to be recognized. In case of a successful
classification the output of the neuron corresponding
to the classified task tends to 1 whereas other
outputs tend to 0. Every neuron, except for the input
layer, was initialized with a random weight in the
range of 1
√
⁄
, where n is the number of neurons
connected by means of that weight (Hernandez-
Espinosa and Fernandez Redondo, 2001; Lari-
Najafi, 1989). As commonly done, a constant weight
of 1 was assigned to the input layer.
After the output presentation, a learning rule was
applied. We used a supervised learning method
(Allred and Kelly, 1990) called backpropagation
(Hecht-Nielsen, 1989), which calculates the mean-
squared error between actual and expected output.
The error value is then propagated backwards
through the network, and small changes are made to
the weights in each layer. The weight changes are
calculated in order to reduce the error signal. The
whole process was then repeated for each trial and
the cycle was reiterated until the overall error value
drops below some pre-determined threshold. We
empirically found that the best learning rate
(measuring the greediness of the algorithm) for our
case has to be set around 0.65.
2.2.2 Fuzzy Logic
Fuzzy logic arises as a method to formalize real-
world concepts that cannot be categorically
identified as true or false, but that may have some
degree of truth. The fuzzy logic has particularly
effectiveness in applications of information
extraction and interpretation.
One of the hallmarks of fuzzy logic is that it
allows nonlinear input/output relationships to be
expressed by a set of qualitative “if-then” rules.
Fuzzy rules provide a powerful framework for
capturing and explaining the input/output data
behavior.
Extracting fuzzy rules for pattern classification
can be viewed as the problem of partitioning the
input space into appropriate fuzzy clusters: groups of
trials with similar structural characteristics
(Mikhailov, 1997). This is made by applying the
algorithm Fuzzy C-Means on each n-dimensional
vector of trials containing the relative powers of
each electrode considered. The FCM is a clustering
algorithm based on optimizing an objective function
(Abonyi, 2002). Given a set of elements
p
n
xxX ℜ⊂= },...,{
1
, the aim of fuzzy clustering
is to determine the prototypes in such a way that the
objective function:
),()(),,(
11
2
∑
∑
==
=
c
i
n
k
ik
m
ik
vxduvUXJ
is minimized (Abonyi, 2002; Menard, 2002; Bezdek,
1981), where
]1,0[
∈
ik
u
stands for the membership
degree of
k
x
to the cluster i, and
),(
ik
vxd
is the
Euclidean distance between
k
x
and the cluster i,
represented by the so called prototype
i
v
. The
apices “c” is the number of clusters. The choice of
the value of the parameter c varies from case to case.
For example, through many tests, the best
classification for right hand movement imagination
was obtained with c equal to 8, whereas for left hand
movement imagination was obtained with 6. No
theoretical foundations are yet available for the
optimal choice of the parameter of the exponent m
which was empirically set to 2.7 (Mikhailov, 1997;
Bezdek, 1981; Romdhane, 1997).
This algorithm was applied for each mental task,
so that they are represented by a set of clusters.
FCM is an iterative process in which each cluster
is regarded as a fuzzy set.
To deduce the Fuzzy rules from clusters, it is
necessary to write a membership functions for each
of them. We decided to use a triangular membership
function as a best choice for adequately represents
the clusters. This was made by projecting on each i-
th axis, the i-th coordinate of the prototype and the
two data points (trials) that are most distant from the
prototype. We assigned the minimum membership
function value (0) to the projected trials and the
maximum value of 1 to the center of the cluster
(prototype). In this way a Mamdani type fuzzy
controller was implemented (Sugeno and Yasukawa
1993; Wong, 2005).
2.2.3 Support Vector Machines
The aim of SVM is to find the hyperplane that
maximizes the separation between classes (Burges,
1998).
Let
),(
k
k
yx
, k=1,…,m represent the training
examples for the classification problem; each
example
N
k
x ℜ∈
belongs to the class
}1,1{
+
−
∈
k
y
.
Assuming linearly separable classes, there exists a
separating hyper-plane such this:
0)( >+ bxwy
kT
k
k =1,…, m (1)
),...,2,1( Cic
i
=
BIOSIGNALS 2010 - International Conference on Bio-inspired Systems and Signal Processing
176
The minimum distance between the data points
and the separating hyper-plane is the margin of
separation. The goal of a SVM is to maximize this
margin. We can rescale the weights w and the bias b
so that the constraints (1) can be rewritten as
1)( ≥+ bxwy
kT
k
k=1,…,m (2)
As a consequence, the margin of separation is
1/||
w
|| and maximization of the margin is equivalent
to the minimization of the Euclidean norm of the
weight vector
w
. The corresponding weights and
bias represent the optimal separating hyper-plane
(Fig. 2). The data points
k
x
for which the constraints
(2) are satisfied with the equality sign are called
support vectors.
By means of Lagrange Multipliers we are able to
consider only these vectors to find the optimal
w
and b (Joachims, 1999). We use a Soft Margin SVM
that introduces a tolerance to classification errors.
The tradeoff between the maximization of the
margin and the minimization of the error is
controlled by a constant C.
For our purpose we found that the best C is in the
range from 10 to 20.
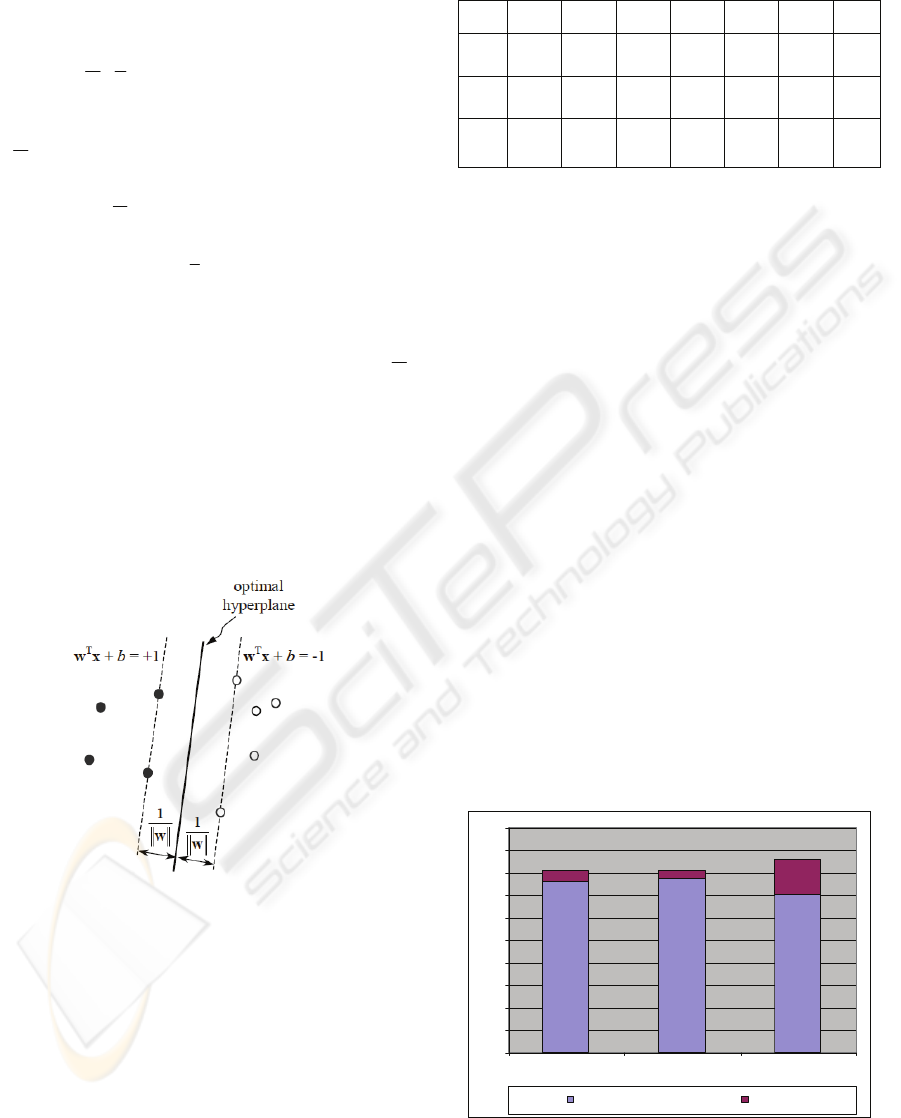
Figure 2: Optimal separating hyper-plane corresponding to
the SVM solution. The support vectors lie on the dashed
lines in the caption.
3 RESULTS AND DISCUSSION
The aim of this study was to discriminate between
each possible couple of tasks. Hence 6 types of
datasets were prepared: L-R, L-S, L-N, R-S, R-N, S-
N, meaning, for instance, with L-R left and right
hand movement imagination tasks. Each dataset was
divided in training set (50% of the dataset) and test
Table 1: Mean percentage accuracies and variances on
each couple of tasks.
set (50% of the dataset).
Classification accuracies for each couple of
mental tasks are shown in table I, while, in Fig. 3,
the percentages of correct classifications as a
function of the number of training trials and for each
classifier, are reported.
It has to be noted that, from data in the literature,
the classification accuracies for these types of tasks
are not really high, being data very noisy (caused by
cerebral activity involved in other functionalities)
and because with actual means spatial resolution is
very low. This testifies that the accuracies achieved
by the three different classifiers are quite good.
As reported in the table above, MLP and fuzzy
achieve substantially the same mean accuracy
whereas SVM has a quite smaller percentage of
correct classification on some couple of tasks. But it
is important to consider that SVM presents a quite
noticeable variance in accuracy (up till 20 points on
SR and NR tasks), in fact it performs an excellent
classification on some subjects, outperforming the
two remaining classifiers.
We can then suppose that only ten electrodes
were not sufficient to stabilize the performances of
SVM on all subjects.
MLP and FCM have got a small variance and
perform a fairly good classification on all subjects.
Figure 3: Percentages of correct classifications as a
function of the number of trials in the training set.
0
10
20
30
40
50
60
70
80
90
100
MLP FCM SV M
Average Variance
SN LR SR SL NR NL
Mea
n
MLP 66±3 75±5 82±5 80±5 75±8 78±4 76±5
FCM 6±3 78±4 80±3 79±8 78±5 80±2
77,1
±4
SVM
60±
10
72±
15
64±
20
70±
15
73±
20
82±15
70,2
3±15
,8
COMPARISON OF DIFFERENT CLASSIFIERS ON A REDUCED SET OF FEATURES FOR MENTAL
TASKS-BASED BRAIN COMPUTER INTERFACE
177

FCM achieves a good compromise between the
accuracy of classification and the computational
cost. In fact, each task required an average of 20
iterations to reach the optimum and so the learning
phase is quite faster than MLP which requires more
computational workload in learning.
Unfortunately FCM needs 40 training trials in the
clustering step to get a high accuracy compared to
MLP that uses a training set constituted by only 5
trials per task. As previously mentioned, it takes 4
seconds to record a trial, being 3 secs spent for
performing the mental task and 1 sec for the ITI.
This leads to a recording session of 80 secs for
training the MLP (5 trials x 4 tasks x 4 secs) and 640
secs for Fuzzy and SVM (40 trials x 4 tasks x 4 secs)
and so a reduction of 8 times in the training of the
former. This is critical because the training phase
should be performed every time the patient that uses
the BCI-system changed (BCI machines are ad-
personam systems), and also if the system is reused
by a different patient (in the replacement of the
helmet the electrodes position can change).
Thus the training is iterated several times and
therefore it is essential for this stage to be as fast as
possible.
4 CONCLUSIONS
It is here reported a comparison among three
different classifiers that discriminate different
mental tasks, for a BCI protocol, on a reduced set of
electrodes (features). In particular a classifier that is
not usual in the literature, based on Fuzzy logic, was
adopted.
Results demonstrate how MLP and Fuzzy
achieved the same good mean accuracy. On the
other hand the neural network needs a reduced
number of trials for training purposes, having the
advantage in the reduction of the recording session
up to 8 times with respect to the other classifiers.
The SVM method achieved different accuracies
for the best-performing subject and the worst one,
whereas with MLP and Fuzzy the variance of the
mean accuracies is quite reduced. This is important
because it attests that SVM can be not enough
accurate with noisy BCI-datasets. In any case we
considered a reduced set of features, and this could
raise the noise in the data.
By increasing the number of features we expect
that SVM improves its accuracy, performing a better
classification than other classifiers, even in the
classification of the mental calculus/recitation of
nursery rhymes couple, that, in general, is the most
difficult to discriminate.
In conclusion, from the study here reported it is
possible to deduce that MLP neural network can be
selected as the best choice for this kind of BCI
protocols, because of its good accuracy with small
variance, and because it requires a smaller number
of trials with respect to the other methods.
Performing well on a reduced set of features is of
fundamental importance, because it means that less
expensive machinery can be used, promoting the use
of BCI to enter in users’ every-day life.
ACKNOWLEDGEMENTS
This work was supported in part by the DCMC
Project of the Italian Space Agency. This paper only
reflects the authors’ views and funding agencies are
not liable for any use that may be made of the
information contained herein.
REFERENCES
Abonyi J., Babuska R. and Szeifert F., “Modified Gath-
Geva Fuzzy Clustering for Identification of Takagi-
Sugeno Fuzzy Models”, IEEE transactions on systems,
man, and cybernetics, 2002.
Allred L. G. and Kelly G. E., “Supervised learning
techniques for backpropagation networks”, IJCNN
International Joint Conference on Neural Networks,
1990, vol. 1, pp. 721-728
Bezdek J. C., “Pattern Recognition with Fuzzy Objective
Function Algorithms”, Plenum Press, 1981.
Burges C. J. C., “A tutorial on support vector machines for
pattern recognition”, Data Mining and Knowledge
Discovery 2, Kluwer, 1998, pp.121-167.
Cammarata S., “Reti neuronali, Dal perceptron alle reti
caotiche e neuro-fuzzy”, Etas 1997
Costantini G., Casali D., Carota M., Saggio G., Bianchi L.,
Abbafati M., Quitadamo L. R. “Mental Task
Recognition Based on SVM Classification”, IEEE, 3rd
IEEE International Workshop on Advances in Sensors
and Interface; 25/26 June 2009 Trani (Bari), Italy; pp.
197-200; IEEE Catalog Number: CFP09IWI-USB
ISBN: 978-1-4244-4709-1 Library of Congress:
200990484
Hara K. and Nakayamma K., “Comparison of activation
functions in multilayer neural network for pattern
classification” IEEE World Congress on
Computational Intelligence., 1994, vol. 5, pp. 2997-
3002.
Hecht-Nielsen R. “Theory of the backpropagation neural
network”, IJCNN International Joint Conference on
Neural Networks, 1989, vol.1, pp. 593-605
Hernàndez-Espinosa and Fernandez Redondo M.,
“Multilayer Feedforward Weight Initialization”,
European Symposium of Artificial Neural Networks
BIOSIGNALS 2010 - International Conference on Bio-inspired Systems and Signal Processing
178

2001, pp. 119-124.
Huan N. J. and Palaniappan R., “Neural network
classification of autoregressive features from
electroencephalogram signals for brain–computer
interface design”, Journal of Neural Engineering,
2004, vol. 1, 142-150.
Joachims T., “Making large scale SVM learning
practical”, Advances in Kernel Methods-Support
Vector Learning”, B. Scholkopf, C.J.C. Burges and
A.J. Smola Eds., MIT Press, Cambridge, MA, 1999,
pp. 169-184
Kandel E., Schwartz J., and Jessell T., “Principles of
Neural Science” USA: McGraw Hill, 2000.
Lari-Najafi H., Nasiruddin M. and Samad T. “Effect of
initial weights on back-propagation and its variations”
1989, vol.1, pp. 218-219
Menard M., “Extension of the objective functions in fuzzy
clustering”, Fuzzy Systems, 2002.
Mikhailov L., Lekova A., Fischer F. and Nour Eldin H. A.,
“Method for fuzzy rules extraction from numerical
data”, IEEE International Symposium on Intelligent
Control, 1997.
Romdhane L. B., Ayeb B. and Wang S., “An improved
scheme for the fuzzifier in fuzzy clustering”, Neural
Networks for Signal Processing Proceedings of the
1997 IEEE Workshop, 1997, pp. 336-344.
Saggio G., Cavallo P., Ferretti A., Garzoli F., Quitadamo
L.R., Marciani M.G., Giannini F., Bianchi L.
“Comparison of two different classifiers for mental
tasks-based Brain-Computer Interface: MLP Neural
Networks vs. Fuzzy Logic”, 1th IEEE International
WoWMoM Workshop on Interdisciplinary Research
on E-Health Services and Systems, IREHSS 2009,
Kos (Greece) June 2009, 978-1-4244-4439-
7/09/$25.00 ©2009 IEEE
Schögl F., Lee H., Bischof and Pfurtscheller G.,
“Characterization of four-class motor imagery EEG
data for the BCI-competition 2005”, Journal of Neural
Engineering, 2005, vol. 2, L14-L22.
Sugeno M. and Yasukawa T., “A Fuzzy Logic Based
Approach to Qualitative Modeling”, IEEE
Transactions on Fuzzy System, 1993, pp. 7-31.
Wolpaw J. R., Birbaumer N., McFarland D. J.,
Pfurtscheller G. and Vaughan T. M. "Brain-computer
interfaces for communication and control", Clinical
Neurophysiology, vol. 113, no. 6, 2002, pp. 767-791.
Wong K. W., Tikk D., Gedeon T. D. and Koczy L.T.,
“Fuzzy rule interpolation for multidimensional input
spaces with applications: a case study”, IEEE
transactions on fuzzy systems, 2005, vol. 13, no. 6.
COMPARISON OF DIFFERENT CLASSIFIERS ON A REDUCED SET OF FEATURES FOR MENTAL
TASKS-BASED BRAIN COMPUTER INTERFACE
179
